Generative Art with Swarm Landscapes



Abstract
1. Introduction
2. Background
3. Materials and Methods
3.1. Software
3.2. Visualization
3.3. PCG Landscapes
3.4. Image Landscapes
4. Results
4.1. Benchmark Functions
4.2. PCG Functions
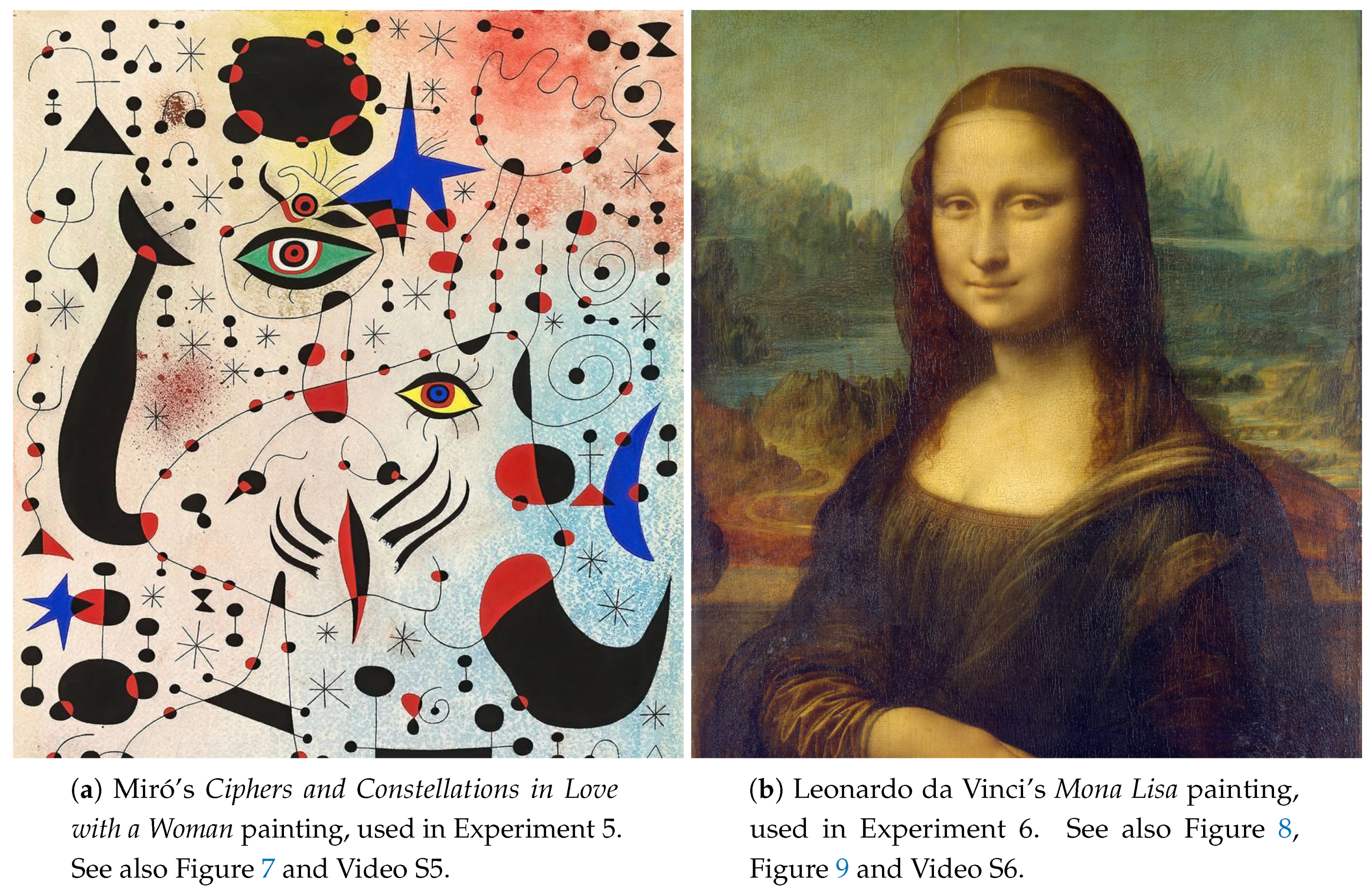
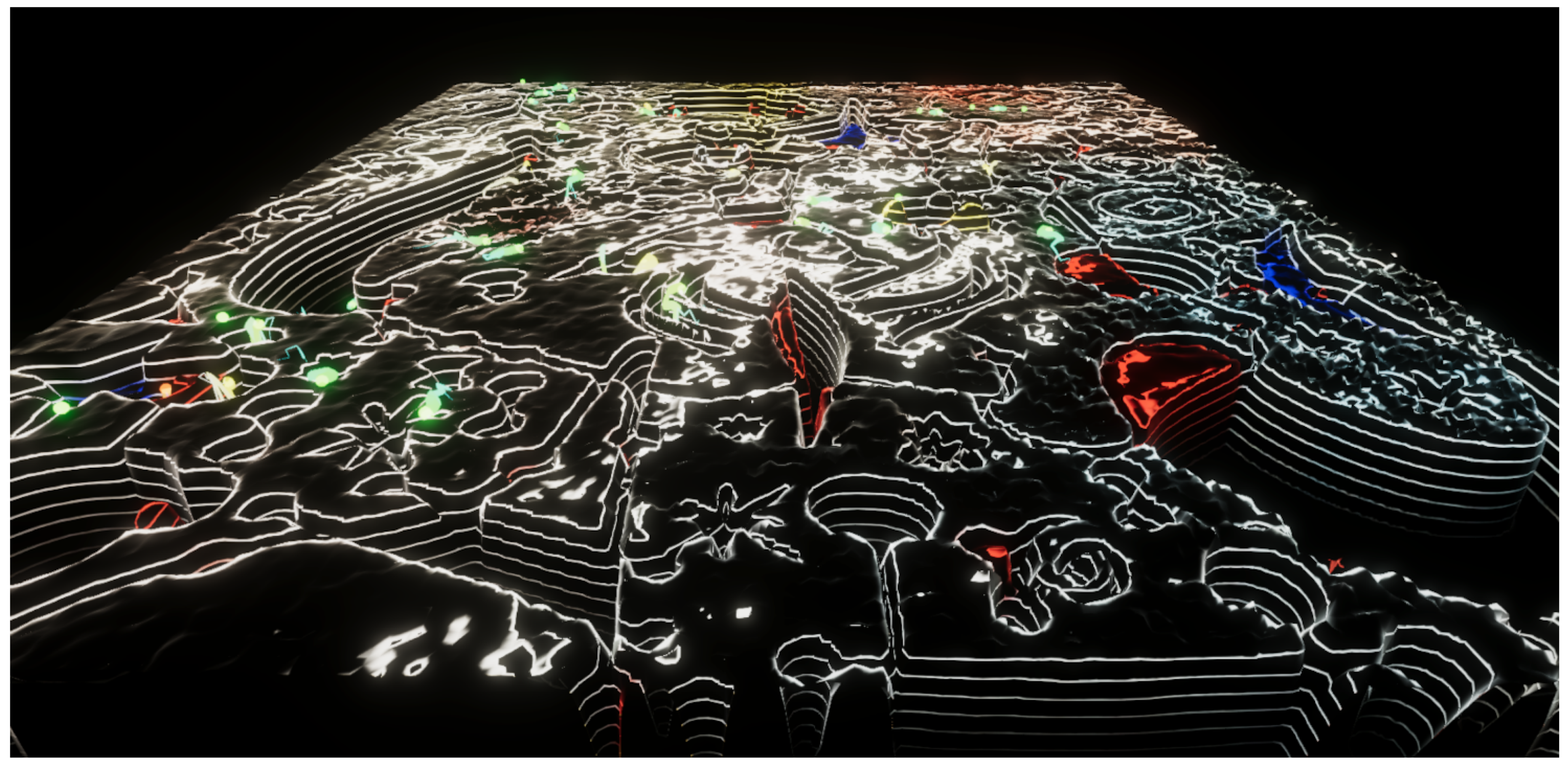
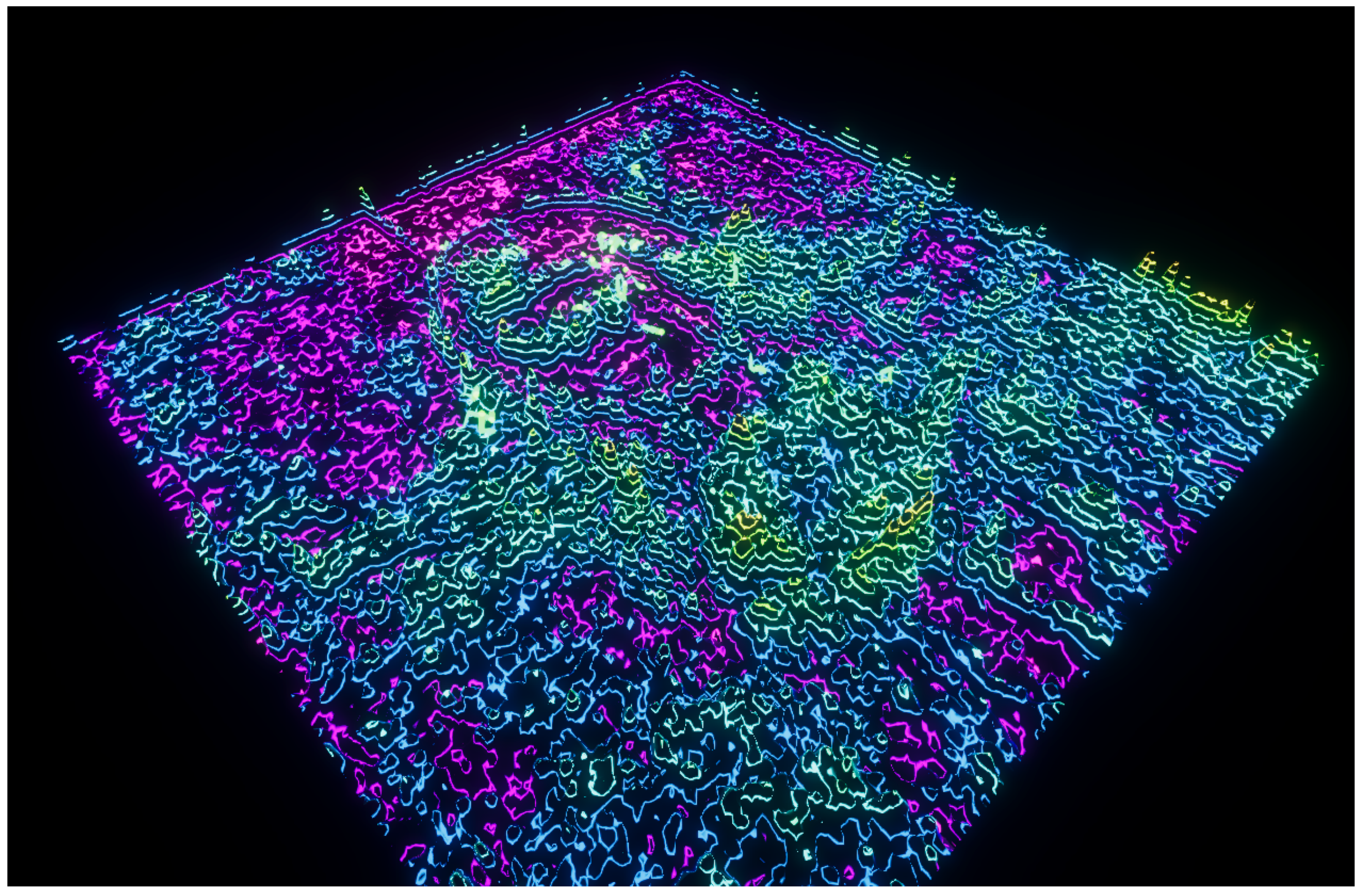
4.3. Image Functions
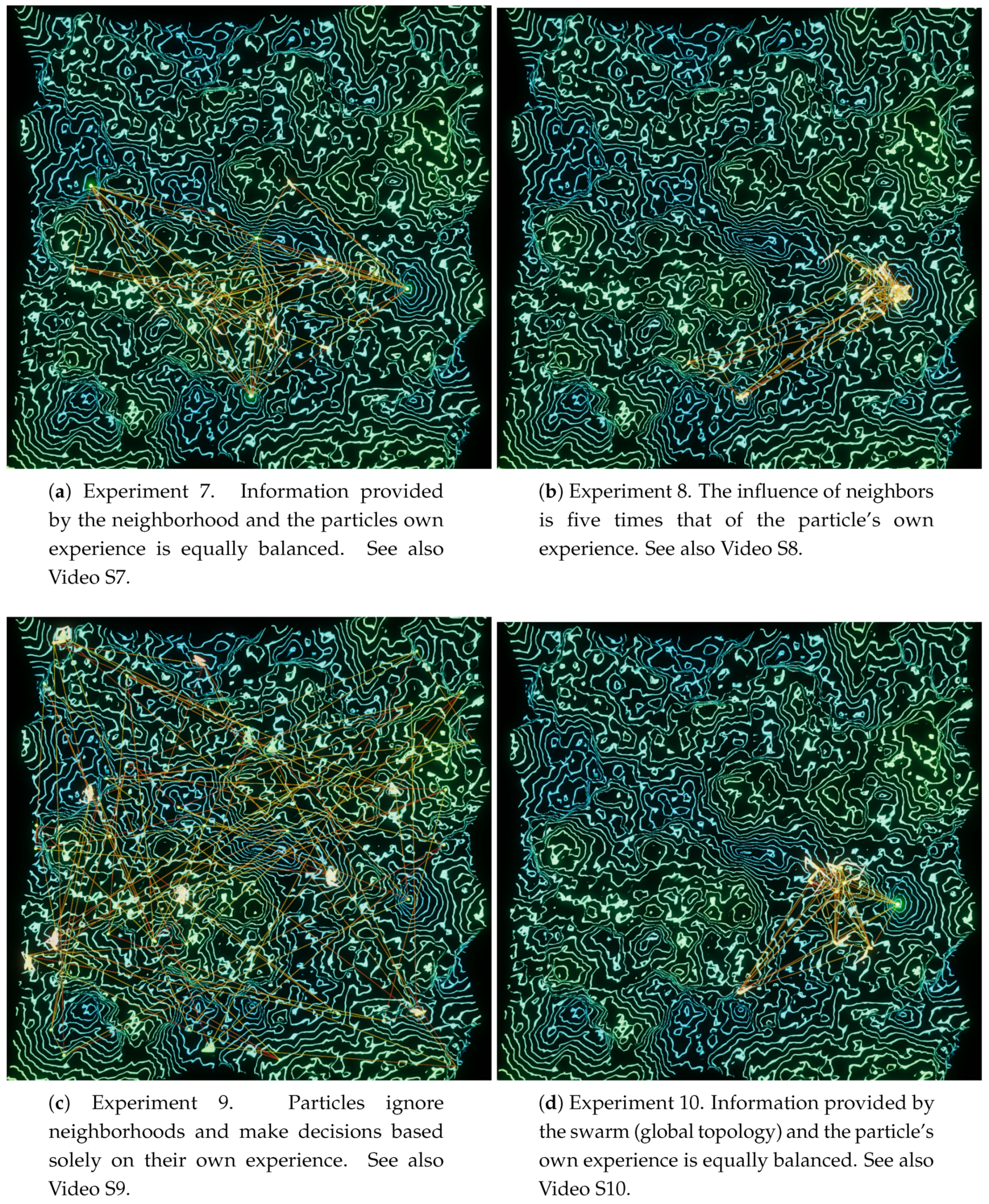
4.4. Connectivity Experiments
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PSO | Particle Swarm Optimization |
| PCG | Procedural Content Generation |
References
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Fernandes, C.M.; Fachada, N.; Merelo, J.J.; Rosa, A.C. Steady state particle swarm. PeerJ Comput. Sci. 2019, 5, e202. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar] [CrossRef]
- Boden, M.A.; Edmonds, E.A. What is generative art? Digit. Creat. 2009, 20, 21–46. [Google Scholar] [CrossRef]
- Greenfield, G.; Machado, P. Swarm art. Leonardo 2014, 47, 5–7. [Google Scholar] [CrossRef]
- Dorigo, M. Optimization, Learning and Natural Algorithms. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 1992. [Google Scholar]
- Todd, S.; Latham, W. Evolutionary Art and Computers; Academic Press Inc.: Cambridge, MA, USA, 1994. [Google Scholar]
- Grassé, P.P. La reconstrucion du nid et les coordinations interindividuelles chez Bellicositermes natalensis et Cubitermes sp. La théorie de la stigmergie: Essai d’interpretation du comportement des termites constructeurs. Insectes Sociaux 1959, 6, 41–80. [Google Scholar] [CrossRef]
- Blackwell, T.M. Swarm music: Improvised music with multi-swarms. In Proceedings of the 2003 AISB Symposium on Artificial Intelligence and Creativity in Arts and Science, University of Wales, Aberystwyth, UK, 7–11 April 2003; pp. 41–49. [Google Scholar]
- Correll, N.; Farrow, N.; Sugawara, K.; Theodore, M. The Swarm-Wall: Toward Life’s Uncanny Valley. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Semet, Y.; O’Reilly, U.M.; Durand, F. An interactive artificial ant approach to non-photorealistic rendering. In Genetic and Evolutionary Computation Conference—GECCO 2004; Lecture Notes in Computer Science; Deb, K., Ed.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 188–200. [Google Scholar] [CrossRef]
- Machado, P.; Pereira, L. Photogrowth: Non-photorealistic renderings through ant paintings. In Proceedings of the 14th Annual Conference on Genetic and Evolutionary Computation; ACM: New York, NY, USA, 2012; pp. 233–240. [Google Scholar] [CrossRef]
- Fernandes, C.M. Pherographia: Drawing by ants. Leonardo 2010, 43, 107–112. [Google Scholar] [CrossRef]
- Aupetit, S.; Bordeau, V.; Monmarché, N.; Slimane, M.; Venturini, G. Interactive evolution of ant paintings. In Proceedings of the 2003 Congress on Evolutionary Computation, Canberra, Australia, 8–12 December 2003; Volume 2, pp. 1376–1383. [Google Scholar] [CrossRef]
- Lutton, E.; Monmarché, N. Art&Science in Evolutionary Computation. Catalogue Side Event. 2013. Available online: http://ea2013.inria.fr/EA2013-catalogue_side-event_A3.pdf (accessed on 7 November 2020).
- Greenfield, G. Evolutionary methods for ant colony paintings. In Applications of Evolutionary Computing; Lecture Notes in Computer Science; Rothlauf, F., Branke, J., Cagnoni, S., Corne, D.W., Drechsler, R., Jin, Y., Machado, P., Marchiori, E., Romero, J., Smith, G.D., et al., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 478–487. [Google Scholar] [CrossRef]
- Greenfield, G. On variation within swarm paintings. In Proceedings of the 8th Interdisciplinary Conference of International Society of the Arts, Mathematics, and Architecture, University at Albany, Albany, NY, USA, 22–25 June 2009; pp. 5–12. [Google Scholar]
- Greenfield, G. Stigmmetry prints from patterns of circles. In Proceedings of the Bridges 2012: Mathematics, Music, Art, Architecture, Culture, Towson, MD, USA, 25–29 July 2012; pp. 291–298. [Google Scholar]
- Urbano, P. The T. albipennis sand painting artists. In Applications of Evolutionary Computation; Lecture Notes in Computer Science; Di Chio, C., Brabazon, A., Di Caro, G.A., Drechsler, R., Farooq, M., Grahl, J., Greenfield, G., Prins, C., Romero, J., Squillero, G., et al., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 6625, pp. 414–423. [Google Scholar] [CrossRef]
- Richter, H. Visual art inspired by the collective feeding behavior of sand-bubbler crabs. In Computational Intelligence in Music, Sound, Art and Design; Lecture Notes in Computer Science; Liapis, A., Romero Cardalda, J.J., Ekárt, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; Volume 10783, pp. 1–17. [Google Scholar] [CrossRef]
- Jacob, C.J.; Hushlak, G.; Boyd, J.E.; Nuytten, P.; Sayles, M.; Pilat, M. SwarmArt: Interactive art from swarm intelligence. Leonardo 2007, 40, 248–254. [Google Scholar] [CrossRef][Green Version]
- Fernandes, C.M.; Mora, A.M.; Merelo, J.J.; Rosa, A.C. KANTS: A stigmergic ant algorithm for cluster analysis and swarm art. IEEE Trans. Cybern. 2013, 44, 843–856. [Google Scholar] [CrossRef] [PubMed]
- Unity Technologies. Unity® (San Francisco, CA, USA). 2020. Available online: https://unity.com/ (accessed on 7 November 2020).
- Ackley, D. A Connectionist Machine for Genetic Hillclimbing; SECS; Kluwer Academic Publishers: Amsterdam, The Netherlands, 1987; Volume 28. [Google Scholar]
- Griewank, A.O. Generalized descent for global optimization. J. Optim. Theory Appl. 1981, 34, 11–39. [Google Scholar] [CrossRef]
- Hoffmeister, F.; Bäck, T. Genetic algorithms and evolution strategies: Similarities and differences. In Parallel Problem Solving from Nature; Schwefel, H.P., Ed.; Springer: Berlin/Heidelberg, Germany, 1991; pp. 455–469. [Google Scholar] [CrossRef]
- Perlin, K. An Image Synthesizer. In Proceedings of the 12th Annual Conference on Computer Graphics and Interactive Techniques; ACM: New York, NY, USA, 1985; pp. 287–296. [Google Scholar] [CrossRef]
- Perlin, K. Noise hardware. In SIGGRAPH 2002 Course 36 Notes: Real-Time Shading Languages; University of Maryland: Baltimore, MD, USA, 2002; Chapter 2. [Google Scholar]
- Cook, R.L.; DeRose, T. Wavelet noise. Acm Trans. Graph. (TOG) 2005, 24, 803–811. [Google Scholar] [CrossRef]
- Millington, I. AI for Games, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar] [CrossRef]
- Ross, B.J.; Ralph, W.; Zong, H. Evolutionary image synthesis using a model of aesthetics. In Proceedings of the 2006 IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 1087–1094. [Google Scholar] [CrossRef]
- Fernandes, C.M.; Fachada, N.; Laredo, J.L.J.; Merelo, J.J.; Castillo, P.A.; Rosa, A. Revisiting Population Structure and Particle Swarm Performance. In Proceedings of the 10th International Joint Conference on Computational Intelligence IJCCI’18, Seville, Spain, 18–20 September 2018; INSTICC, SciTePress: Setúbal, Portugal; Volume 1, pp. 248–254. [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report tr06; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Del Ser, J.; Osaba, E.; Molina, D.; Yang, X.S.; Salcedo-Sanz, S.; Camacho, D.; Das, S.; Suganthan, P.N.; Coello, C.A.C.; Herrera, F. Bio-inspired computation: Where we stand and what’s next. Swarm Evol. Comput. 2019, 48, 220–250. [Google Scholar] [CrossRef]
- Villalón, C.L.C.; Stützle, T.; Dorigo, M. Grey Wolf, Firefly and Bat Algorithms: Three Widespread Algorithms that Do Not Contain Any Novelty. In ANTS 2020: Swarm Intelligence; Dorigo, M., Stützle, T., Blesa, M.J., Blum, C., Hamann, H., Heinrich, M.K., Strobel, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 121–133. [Google Scholar] [CrossRef]
- Luz, F.; Fachada, N.; Junior, R. Biofeedback Game Design. In Proceedings of the Play2Learn 2018, Lisbon, Portugal, 19 April 2018; p. 350. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Argument | Description |
|---|---|
| -preset<number> | Select one of the builtin presets. Number must be an integer in the range . |
| -experiment<number> | Select one of the builtin experiments, as represented in this article. Number must be na integer in the range . |
| -random | Generate a random visualization. Same as not passing any parameter. |
| -rngseed | Seed for random number generator. |
| Perlin noise PCG options | |
| -landscape | Generate a Perlin-based function. |
| -octaves<number> | Number of octaves for the Perlin landscape. |
| -amplitude<value> | Initial amplitude for the Perlin landscape. |
| -frequency<value> | Initial frequency for the Perlin landscape. |
| Image options | |
| -imagesaturation | Use an image’s HSV Saturation as a function. |
| -imagevalue | Use an image’s HSV Value (brightness) as a function. |
| -ralphmean | Use Ralph’s bell curve mean as function. |
| -ralphvar | Use Ralph’s bell curve variance as function. |
| -sampleradius<radius> | Define the radius to use as the neighborhood for computing Ralph’s bell curve. Note that this is a operation, so large radius will take some time to compute. |
| -usestimulus | Use the stimulus value, instead of the more traditional response value for computing Ralph’s bell curve. |
| -useresponse | Use the response value for computing Ralph’s bell curve. This is the default. |
| -image<index> | Select a predefined image as the source image. Index must be na integer in the range . |
| -image<filename> | Load an image from the given path and uses it as source image. Only JPG and PNG are valid. |
| Benchmark functions | |
| -sphere | Use the sphere function. |
| -quadric | Use the quadric function. |
| -hyperellipsoid | Use the hyperellipsoid function. |
| -rastrigin | Use the Rastrigin function. |
| -griewank | Use the Griewank function. |
| -schaffer | Use the Schaffer function. |
| -ackley | Use the Ackley function. |
| -weierstrass | Use the Weierstrass function. |
| PSO parameters | |
| -w<value> | Specify . |
| -c<value> | Specify and with the same value. |
| -c1<value> | Specify the value. |
| -c2<value> | Specify the value. |
| -vmax<value> | Specify the maximum speed for the particles. |
| Visual parameters | |
| -scale<value> | Allow to scale the Y values of function. |
| -material<index> | Select the material to use for the visualization. Index must be an integer in the range . |
| -fof | Enable the fog of function option. |
| -connectivity | Display the particle connectivity. |
| -speed<number> | Define the speed of the simulation. Default is 1, 2 is twice the speed, 0.5 is half-speed. |
| Exp. | Function | xMax | vMax | Topology, Swarm Size | Scl. | PS | FoF | Conn. | Material | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | Rastrigin | 10 | 0.15 | 1.5 | 1.5 | VN, | 0.1 | 4 | no | no | Purple/Blue |
| 2 | Perlin Lands. | 100 | 0.5 | 1 | 1 | VN, | 1 | 1 | yes | no | Spectrum |
| 3 | Perlin Lands. | 100 | 10 | 1 | 4 | VN, | 1 | 1 | yes | no | Spectrum |
| 4 | Perlin Lands. | 100 | 0.5 | 2 | 0.5 | VN, | 1 | 1 | yes | no | Red/Yellow |
| 5 | HSV Value | 100 | 1 | 1 | 1 | VN, | −20 | 1 | no | no | Textured |
| 6 | Ralph’s Bell Curve Mean | 100 | 1 | 1 | 1 | VN, | −1 | 1 | no | no | Textured |
| 7 | Perlin Lands. | 100 | 5 | 1 | 1 | VN, | 1 | 1 | no | yes | Blue/Green |
| 8 | Perlin Lands. | 100 | 5 | 2 | 10 | VN, | 1 | 1 | no | yes | Blue/Green |
| 9 | Perlin Lands. | 100 | 5 | 5 | 0 | VN, | 1 | 1 | no | yes | Blue/Green |
| 10 | Perlin Lands. | 100 | 5 | 1 | 1 | Global, 25 | 1 | 1 | no | yes | Blue/Green |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Andrade, D.; Fachada, N.; Fernandes, C.M.; Rosa, A.C. Generative Art with Swarm Landscapes. Entropy 2020, 22, 1284. https://doi.org/10.3390/e22111284
de Andrade D, Fachada N, Fernandes CM, Rosa AC. Generative Art with Swarm Landscapes. Entropy. 2020; 22(11):1284. https://doi.org/10.3390/e22111284
Chicago/Turabian Stylede Andrade, Diogo, Nuno Fachada, Carlos M. Fernandes, and Agostinho C. Rosa. 2020. "Generative Art with Swarm Landscapes" Entropy 22, no. 11: 1284. https://doi.org/10.3390/e22111284
APA Stylede Andrade, D., Fachada, N., Fernandes, C. M., & Rosa, A. C. (2020). Generative Art with Swarm Landscapes. Entropy, 22(11), 1284. https://doi.org/10.3390/e22111284