In this section, we present some numerical applications of the model we have constructed. The main focus is to describe different kinds of diffusion dynamics and interactions between agents together with different application of the rules. We consider two simple situations; more realistic simulations are postponed to a forthcoming paper.
3.1. A Simple Network with Three Agents
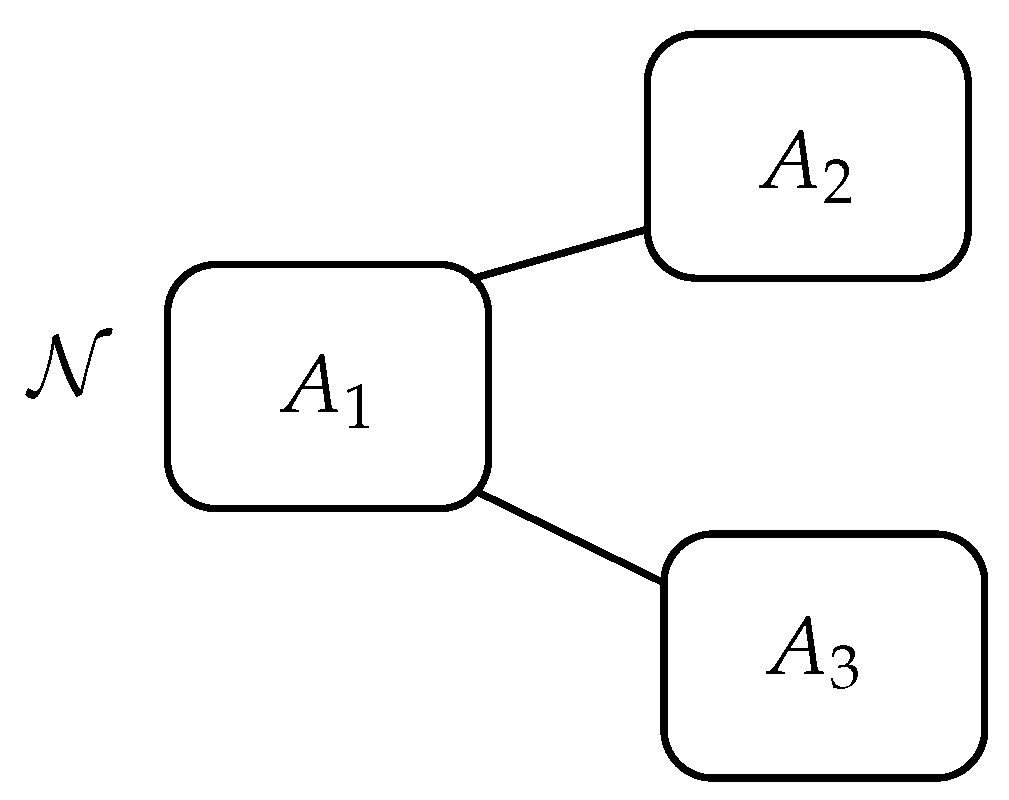
The first application we present is related to the diffusion of news
in a network with three agents. We suppose that, initially Agent 1 diffuses good news
, and that this agent can interact and be influenced by two other agents, 2 and 3, whop, in turn, do not interact between themselves (see the schematic representation in
Figure 1).
We suppose that the various agents communicate in a different way, and that Agents 2 and 3 behave in a different way regarding the diffusion of news from : agent is inclined to accept only good news, whereas prefers fake news. We also suppose that is inclined to change the nature of and hence he influences Agent 1 to change the nature of .
We consider the following set of parameters determining the strength of the various mechanisms previously described. The parameters of the inertial terms are , which express the fact that agents and tends to be more inclined than to maintain their perception about . The parameters for the interactions of the agents are (remember that ), expressing the fact that and share basically good news, whereas and share fake news. The parameters related to the change in the nature of of the various agents are , , meaning that easily changes the nature of when compared to the more conservative agents and . We consider also the following initial conditions: , so that initially (at ) Agent 1 diffuses good news .
In order to apply rules
and
, we take
, and the weights in (
13) are chosen as
expressing that
and
influence themselves above all for good news, whereas
and
for fake news. In the case of rule
we also take
, meaning that each agent attributes a great role to his own perception of
. It is to be expected that the application of the rules can drastically change the way
is finally perceived by the agents, depending on how the various agents are influenced by the others, and hence depending on whether we adopt the rule
or
.
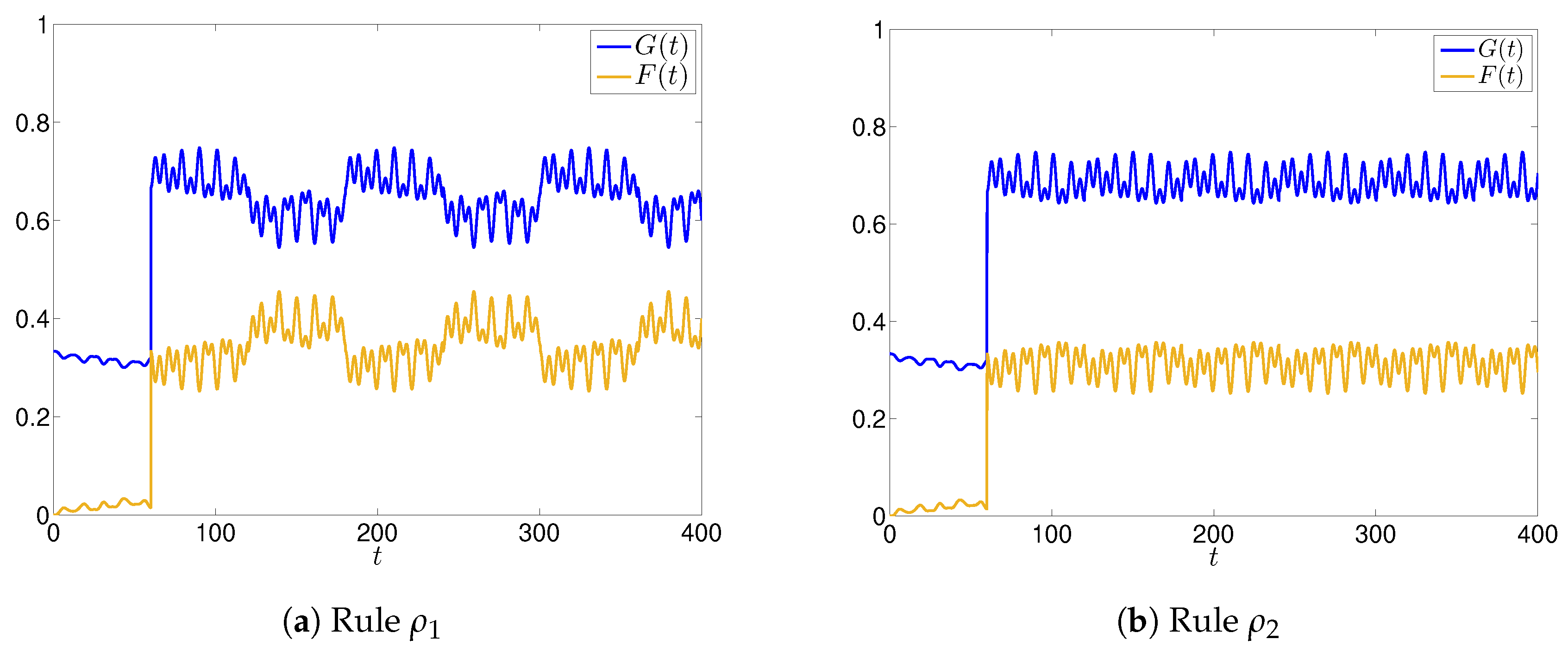
The time evolution of the main function
and
for the two rules
and
are shown in
Figure 2 (we recall from the last remark of
Section 2.1 that we have
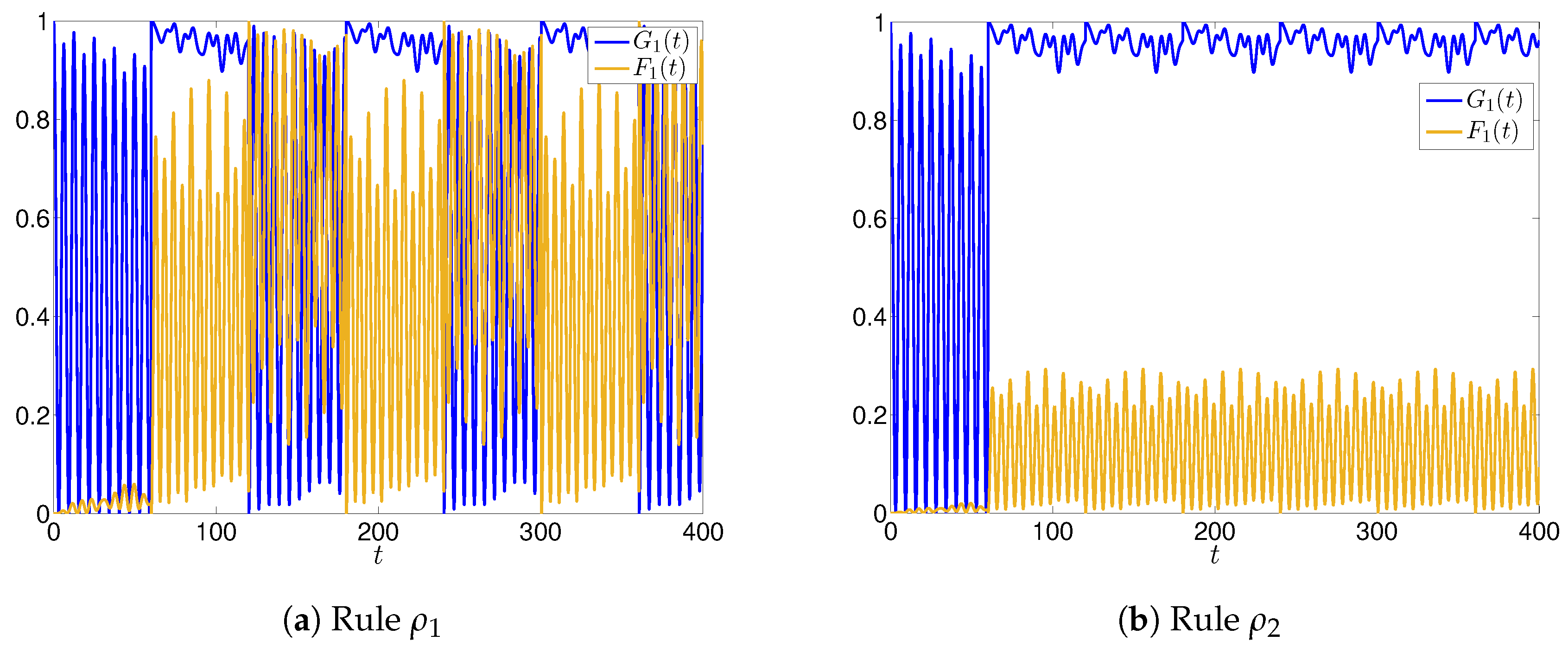
.), while in
Figure 3 we show the time evolution of the functions
and
, focusing on agent
.
Let us first analyze the case of rule
. We notice that in every sub interval
, all the evolutions are periodic with alternating phases in which strong oscillations appear, representing a sort of uncertainty in how news is perceived. The appearance of the oscillations is even more pronounced if we look at the evolution for a specific agent, say
(the dynamics of other agents, not shown here, exhibit similar oscillations). This is clearly seen by comparing
Figure 2 and
Figure 3. The main reason for that is due to the way
interacts with
: in fact,
receives good news
, and converts the nature of
that becomes fake (high value of
), and induces
to change the nature of
(high values of
and
). On the other side,
is inclined to maintain the nature of
, which explains why, despite the phases of oscillations/uncertainty, news
remains on average good (
), regardless of the uncertainty induced by
.
On the contrary, by considering the
active rule
, we have that in this case the agents are inclined to be a little bit less influenced by the surrounding agents, since they give a non-zero
weight to their own perception of news. In fact, we can observe from
Figure 2b and
Figure 3b that the amplitudes of the oscillations are weakened, and the perception of the goodness of
is higher than that when we adopt rule
case (in the sense that the mean value of
is higher). Moreover, as expected from the application of
, the evolution of
exhibits a lower uncertainty, this value being very close to the maximum value 1 for
.
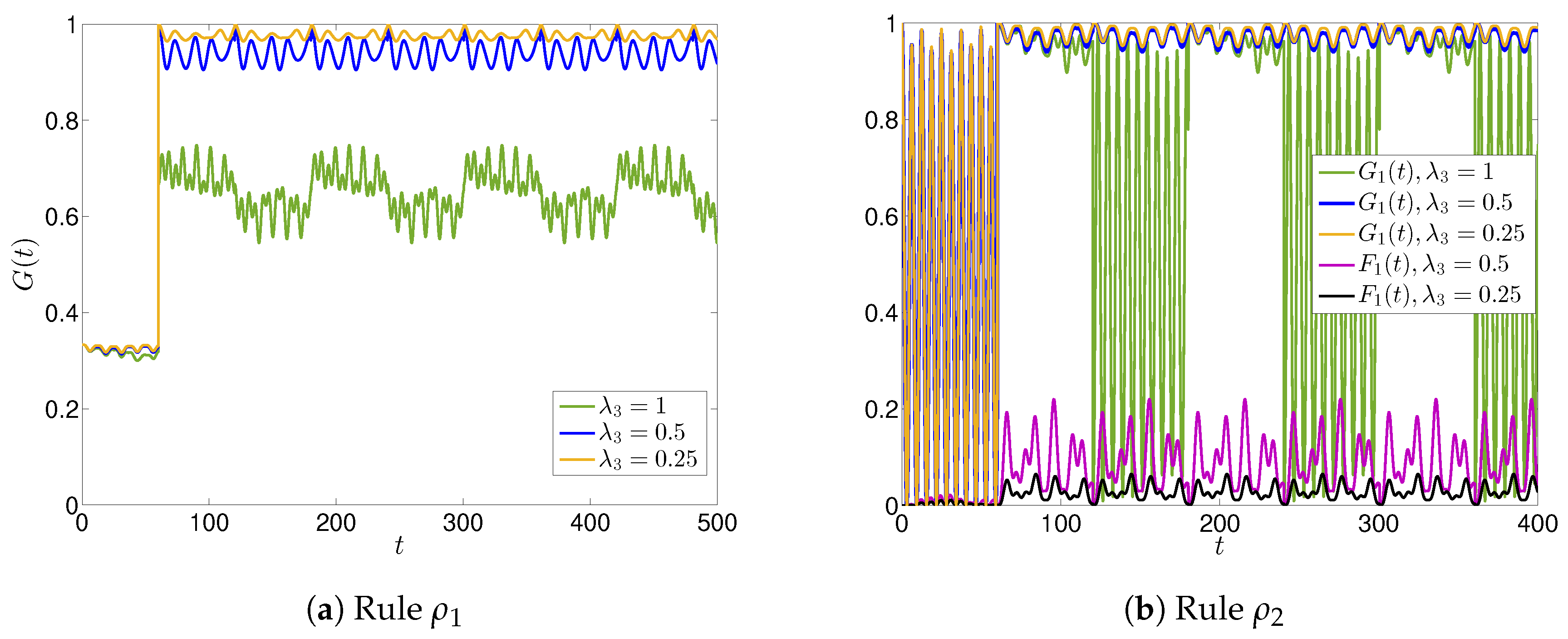
We now present the results obtained by lowering the parameter
which is responsible for the highly variable nature of
for
and, as a consequence, for
. In
Figure 4, we plot the time evolution of
and
for different values of
and compare them with the already analyzed case
. As expected, moderate low values
determine a more stable time evolution, since
is less inclined to change the nature of
diffused by
: the news is globally perceived good, as both
and
get very close to the maximum value 1.
3.2. A Network with Seven Agents
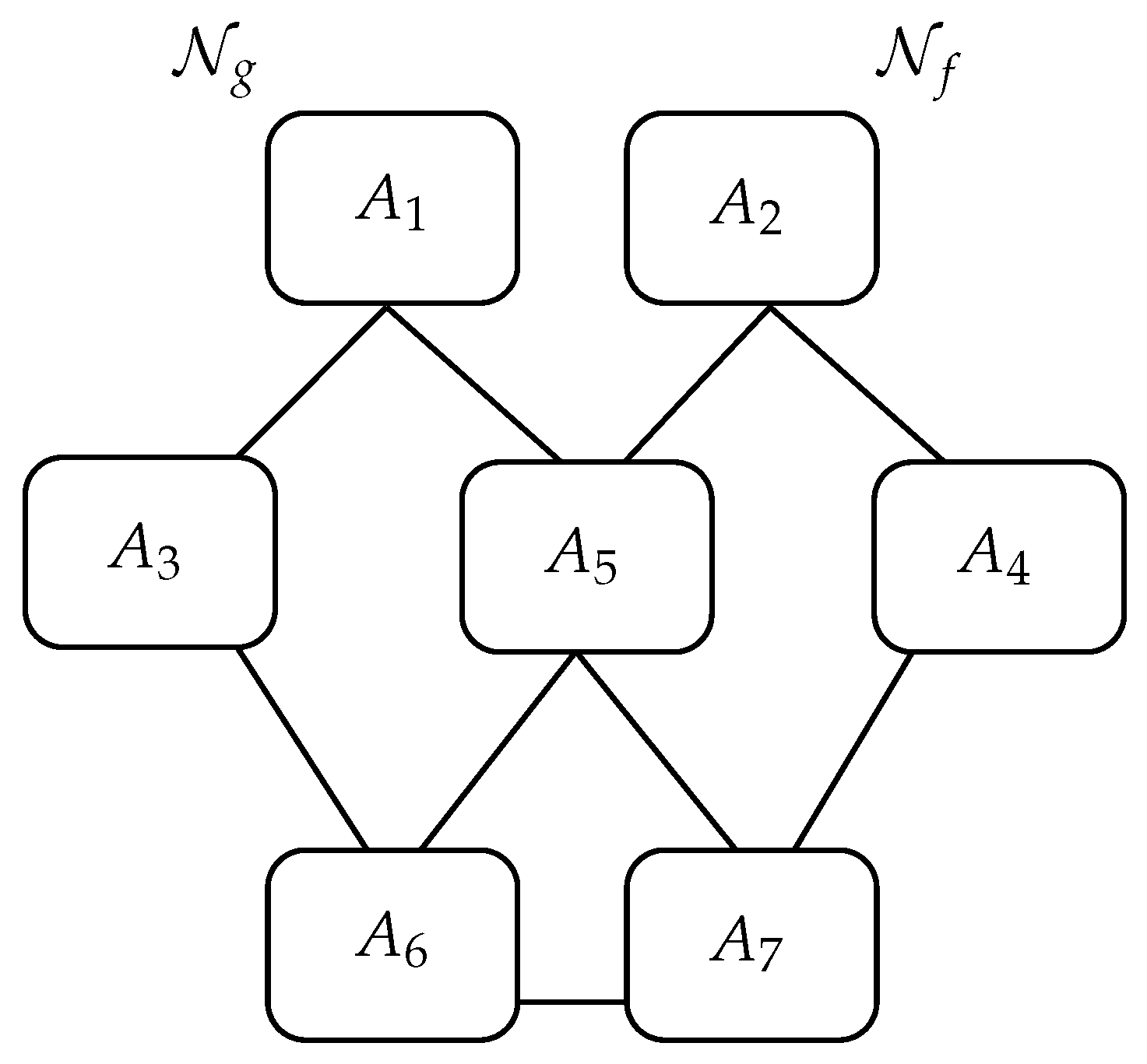
The second application we present is the diffusion of news among agents belonging to different levels. These levels could represent (from the highest to the lowest) transmitters verifying the nature of the news with some investigations, inquiries, validations, agents representing some media, and agents which are actually a generic class of final receivers of news (for instance, people getting information from social media, or people using only reliable TV news programs.). A schematic representation of this model and the connections among the agents is shown in
Figure 5. The first level is made by two non-interacting main transmitters. We suppose that good news,
is transmitted by agent
, and fake news,
, by agent
. The second level consists of three agents interacting with the main transmitters, and with the two final receivers: only the agent
interacts with all the transmitters and receivers. Finally, the third level is made by two receivers communicating between themselves too; therefore, they can influence the perception of news of the other receiver. From the schematic representation of the interaction paths, we can observe that the agent
(the first receiver) looks more influenced by the agent
and then by agents
and
, whereas the
(the second receiver) by
and then by agents
and
: therefore, without considering the mechanisms responsible for the change in news, the two receivers are inclined to perceive
and
, respectively, as sent by the transmitters, at least if the strength of the various interactions are similar. Of course, the real interesting situation is when some agent changes the reliability of news and how the receivers react accordingly.
The initial conditions for this model are easily written: , while for , and , for . The parameters of the free dynamics are all taken equal to 0.5, and the other parameters are chosen accordingly to strengthen or weaken the influence of the other mechanisms with respect to the free dynamics.
The interaction parameters are different from zero only for the related agents having connections, as shown in
Figure 5, and depend also on the kind of initial news; among all the possible choices, we set
,
,
, and
, and of course
for all
. The above choices reflect a certain strength between the agents of the first two levels, and between the final receivers which could represent a real situation in which people easily, and very often without care, transmit news or modify it using social media.
In this simulation, we consider the possibility that only the final receivers are able to change the way news is diffused (this could mimic the way the people modify or distort news), and we set , whereas is varied. Of course, in the case where , it results that agent is more inclined to change the nature of the news to fake. The fact that is in general much smaller then the others parameters means that agent is almost fair and essentially communicates news as it is received (no matter good or fake), so that agent can be the main party responsible for the alteration of news.
For the application of the rules
we take as before
, and the weights used in (
13) are set equal to the related interaction parameters:
, and only for rule
we also take
.
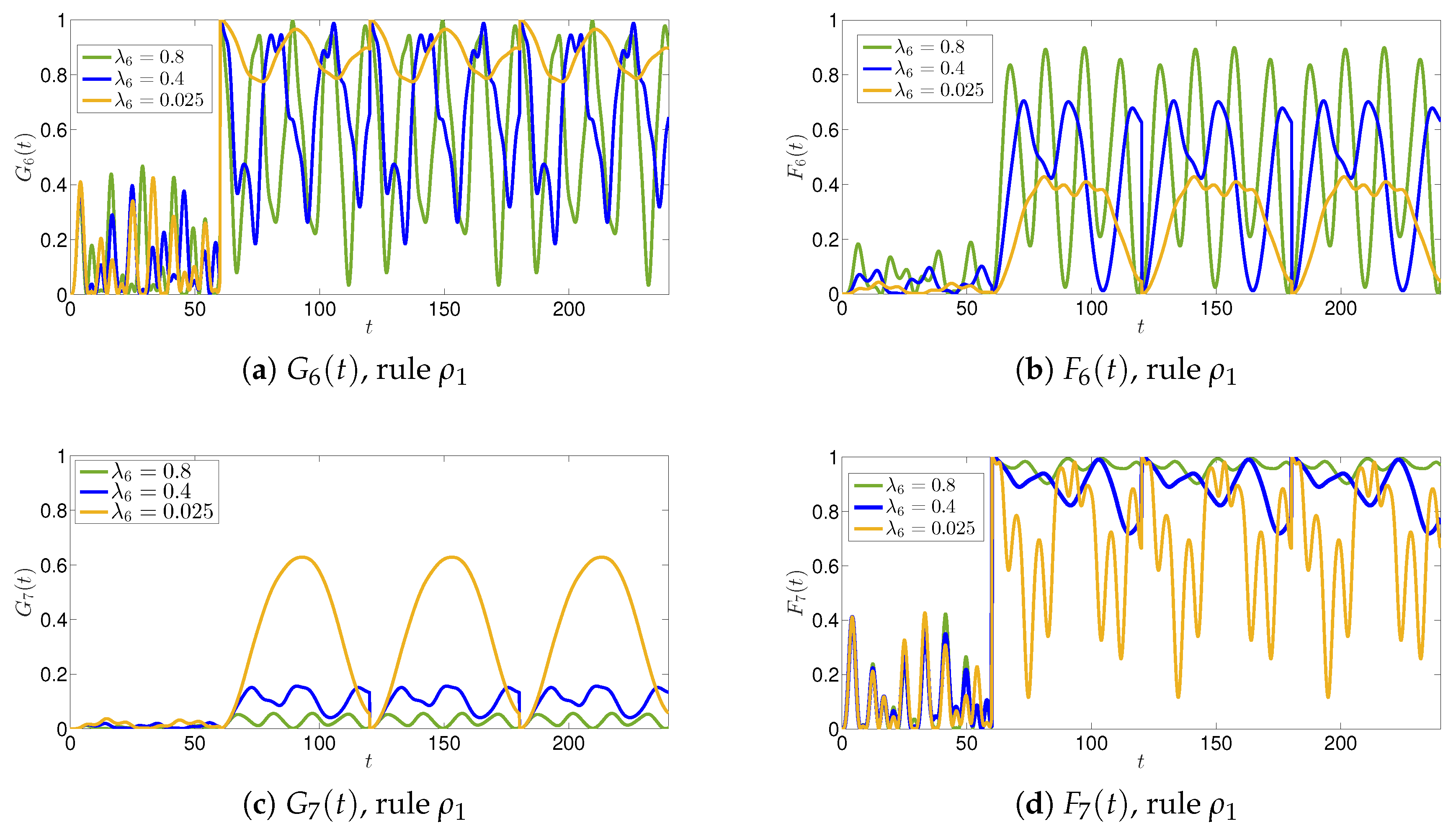
We first present the results related to rule
, shown in
Figure 6 the time evolutions of the functions
,
,
and
for different values of the parameter
. We can observe that, for
, there is a different tendency of the agents in changing the way news is transmitted by the main agents
and
. In fact, after the application of the rule at
, we have that
oscillates very close to the maximum value 1, whereas
is very low, meaning that agent
considers news transmitted by
as good. At the same time, due to the interactions with the agent
(
),
changes its perception of fake news
, and both functions
and
show evident oscillations, which express the uncertainty of the agent
.
For , we can observe a slightly more stable situation. In fact, despite the fact that the uncertainty of increases, we still have , and the uncertainty of is significantly decreased as —on average, agents and consider news as good when it is transmitted by , and fake when transmitted by . Increasing further has remarkable effects on the uncertainty of agent , while decreasing that of agent . In fact, for , there is no clear determination of the reliability of the news for agent , and and oscillate in all the interval . The oscillations of and are instead damped and , , so that perceives the news as fake. The reason for this dynamics is that, for large , is inclined to change the nature of to fake, and this reinforces the perception of news by as fake.
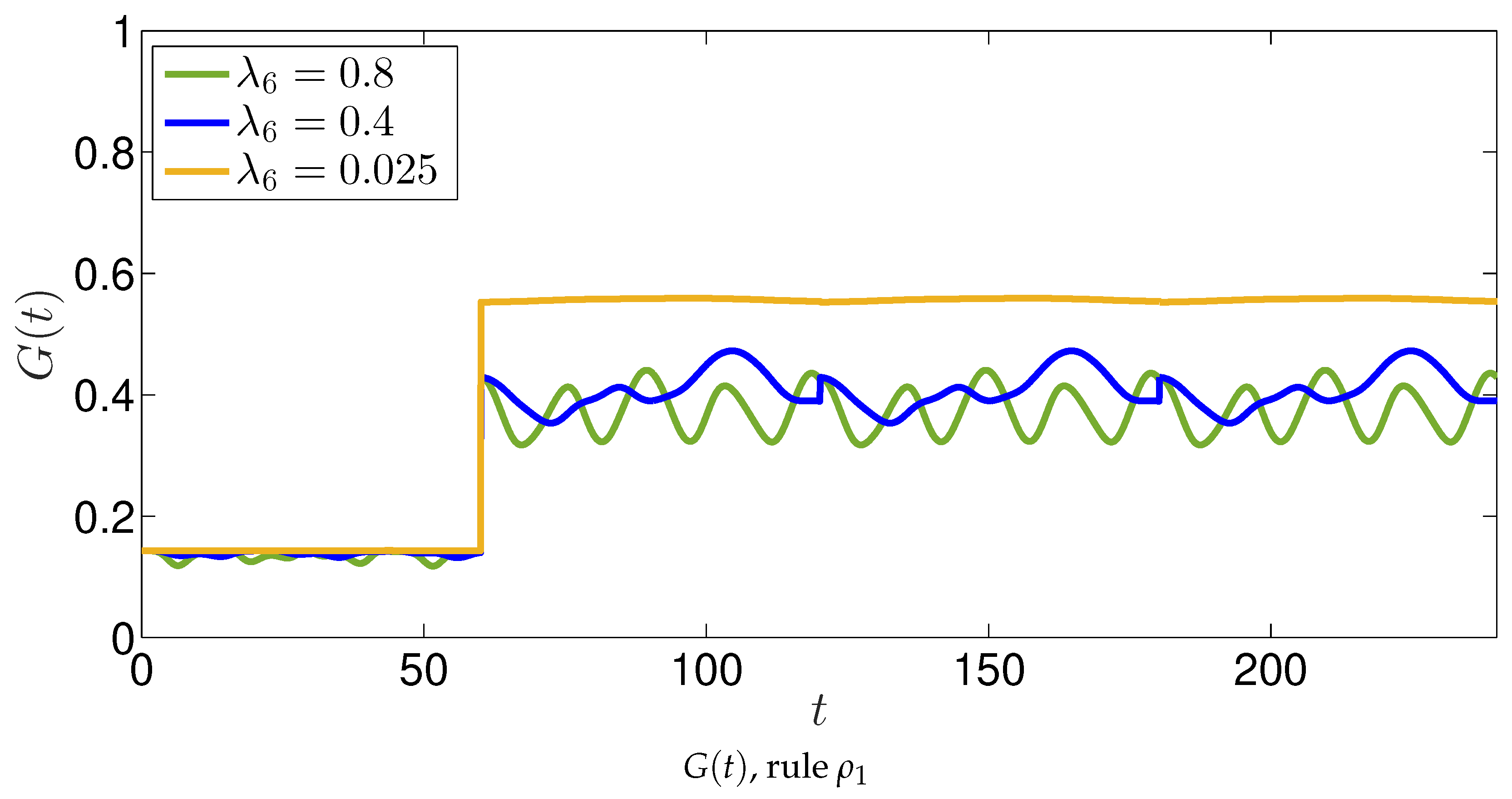
We also show the global function
in
Figure 7 for the various
we have considered (we recall that, after the time
T, it results in
). Again, oscillations are wider for larger
, and the overall mean values decrease for increasing
. This is somewhat expected, because the larger
is more inclined in changing news from good to fake, so that
.
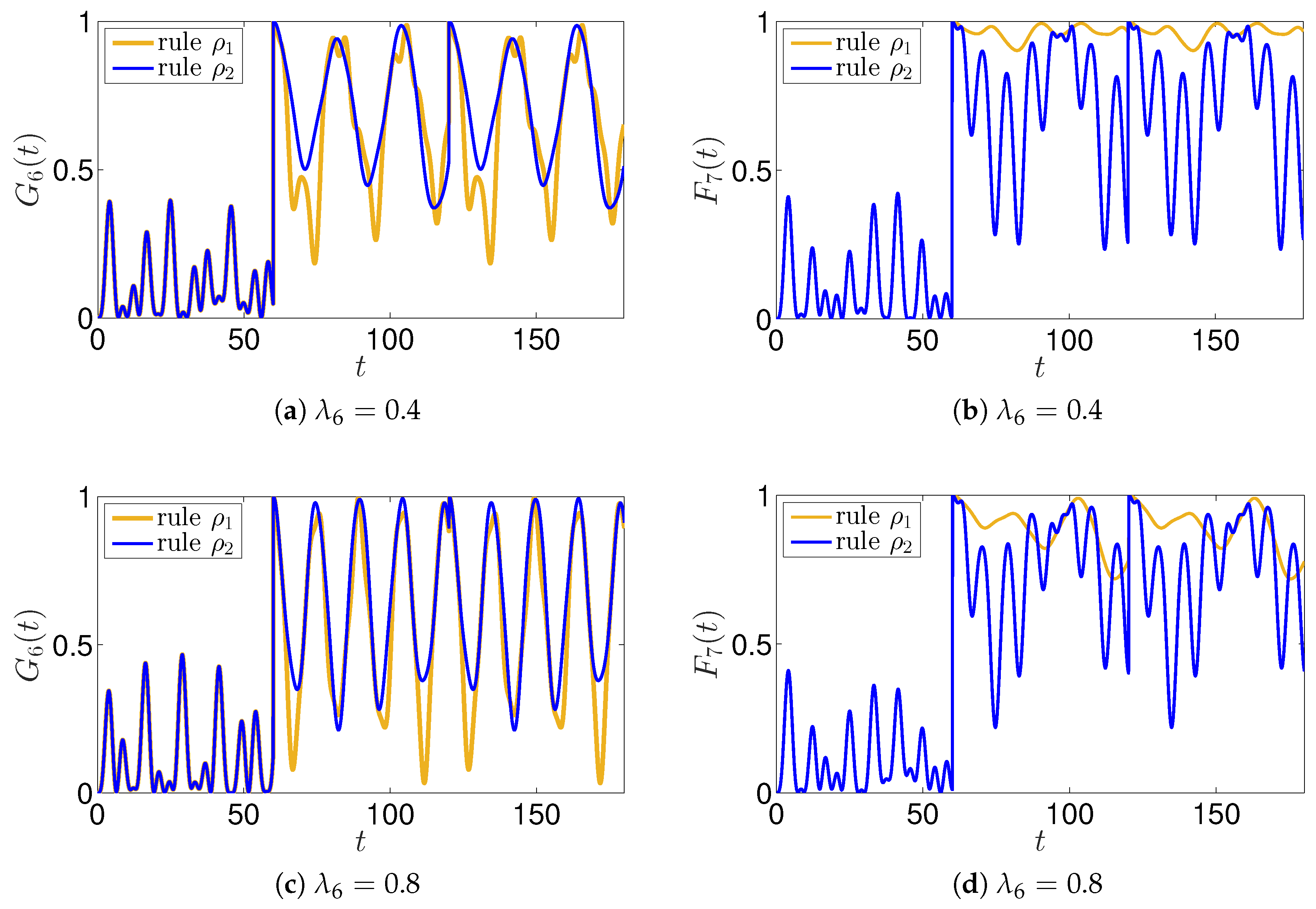
The results concerning the application of rule
are shown in
Figure 8, where the functions
and
are shown for values
and
, and compared with the results of the rule
. The overall outcome is that all the uncertainties are weakened for the agent
, and reinforced for the agent
; nevertheless, we observe that a global uncertainty arises that requires a more deep analysis.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







