Multi-Harmonic Source Localization Based on Sparse Component Analysis and Minimum Conditional Entropy

Abstract
1. Introduction
2. Separation of Harmonic Currents in HSE Model
2.1. Relationship between HSE Model and BSS Model
2.2. Independent Component Analysis Algorithm Using Fast-ICA
- (1)
- De-averaging and whitening of the observation signal X;
- (2)
- Identify the number of source signals n;
- (3)
- Initialize the demixing matrix W, ;
- (4)
- Iteratively calculate the demixing matrix W:
- (5)
- The orthogonalisation of the demixing matrix W: ;
- (6)
- If W does not converge, return to step (4) and iterate until the convergence condition is satisfied.
2.3. Two-Step Method to Obtain the Mixing Matrix and Source Signal Respectively
3. Selection of Measurement Point Data
- (1)
- Firstly, construct the system association matrix R, and define the elements in R as follows:According to the definition of R, the association matrix of IEEE 14-nodes can be obtained as follows:
- (2)
- In order to ensure the optimal configuration of the nodes, it is necessary to have at least one measuring device for each row in Equation (14). According to the association matrix of Equation (14), the following relationship is obtained:where “+” is the logical operation “OR”, indicating that there is at least one non-zero value in the i-th row of the association matrix R.
4. Identify the Location of the Harmonic Source Using Minimum Conditional Entropy
5. Harmonic Source Localization Using CA and Minimum Conditional Entropy
- (1)
- Measuring system node harmonic voltageMeasure the harmonic voltage Uh of all nodes in the system.
- (2)
- Selection of measurement pointsAccording to the network topology of the power system, a measurement node configuration model is established to determine the location and quantity of the measurement nodes.
- (3)
- Sparsification of harmonic voltage signalsUsing the proposed thinning method, thinning the harmonic voltage signal of the measurement node.
- (4)
- Separation of harmonic currentThe harmonic voltage of these measurement nodes is used as the input of the SCA separation algorithm. The hybrid matrix A and the harmonic current S is obtained.
- (5)
- Localization of the harmonic sources
6. Example Test
6.1. Comparison between SCA and Fast-ICA Configuration Schemes
6.2. Accuracy Analysis of Separating Harmonic Current Waveform and Actual Harmonic Current
6.3. Performance Comparison between SCA and Fast-ICA Algorithms
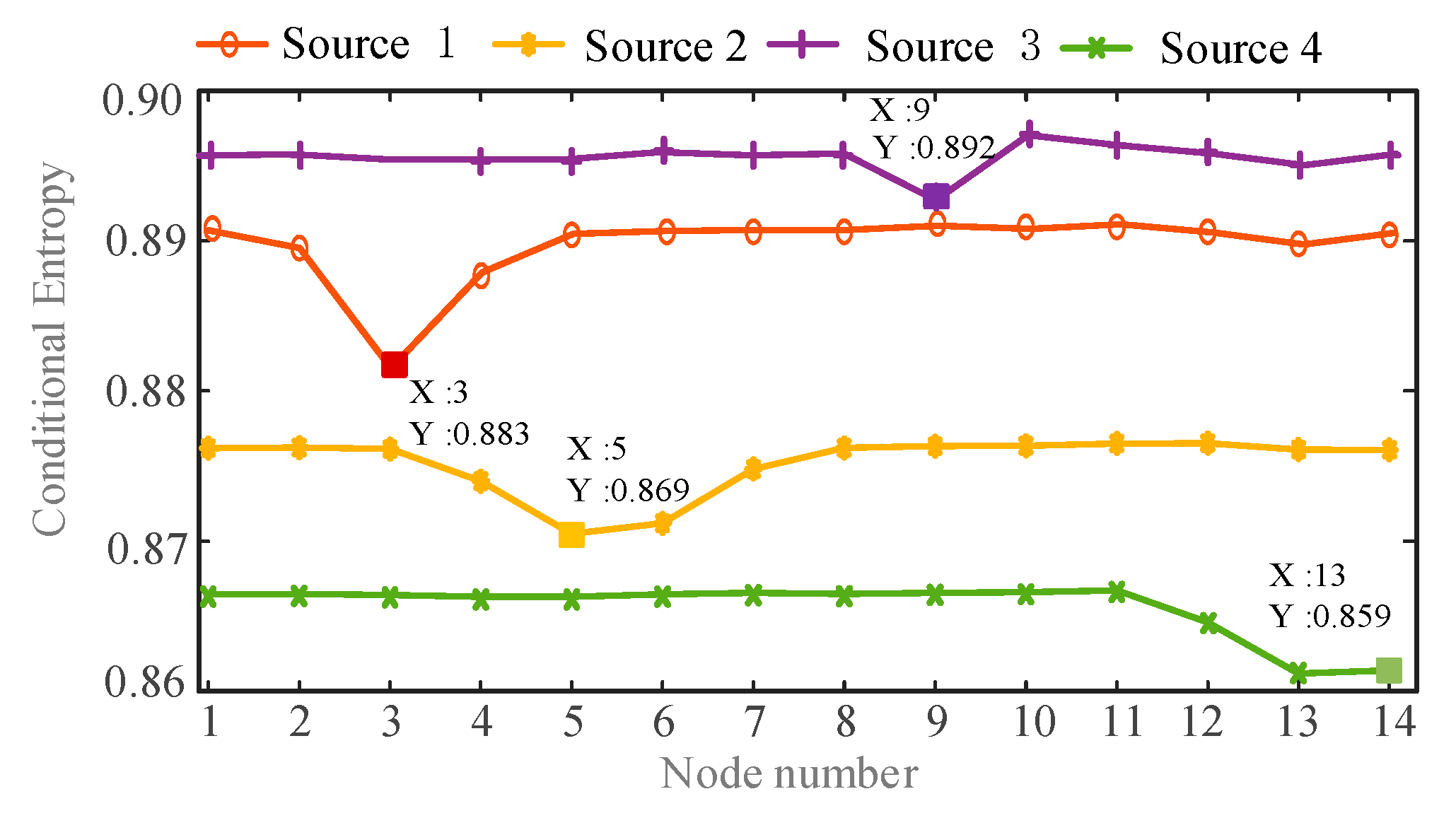
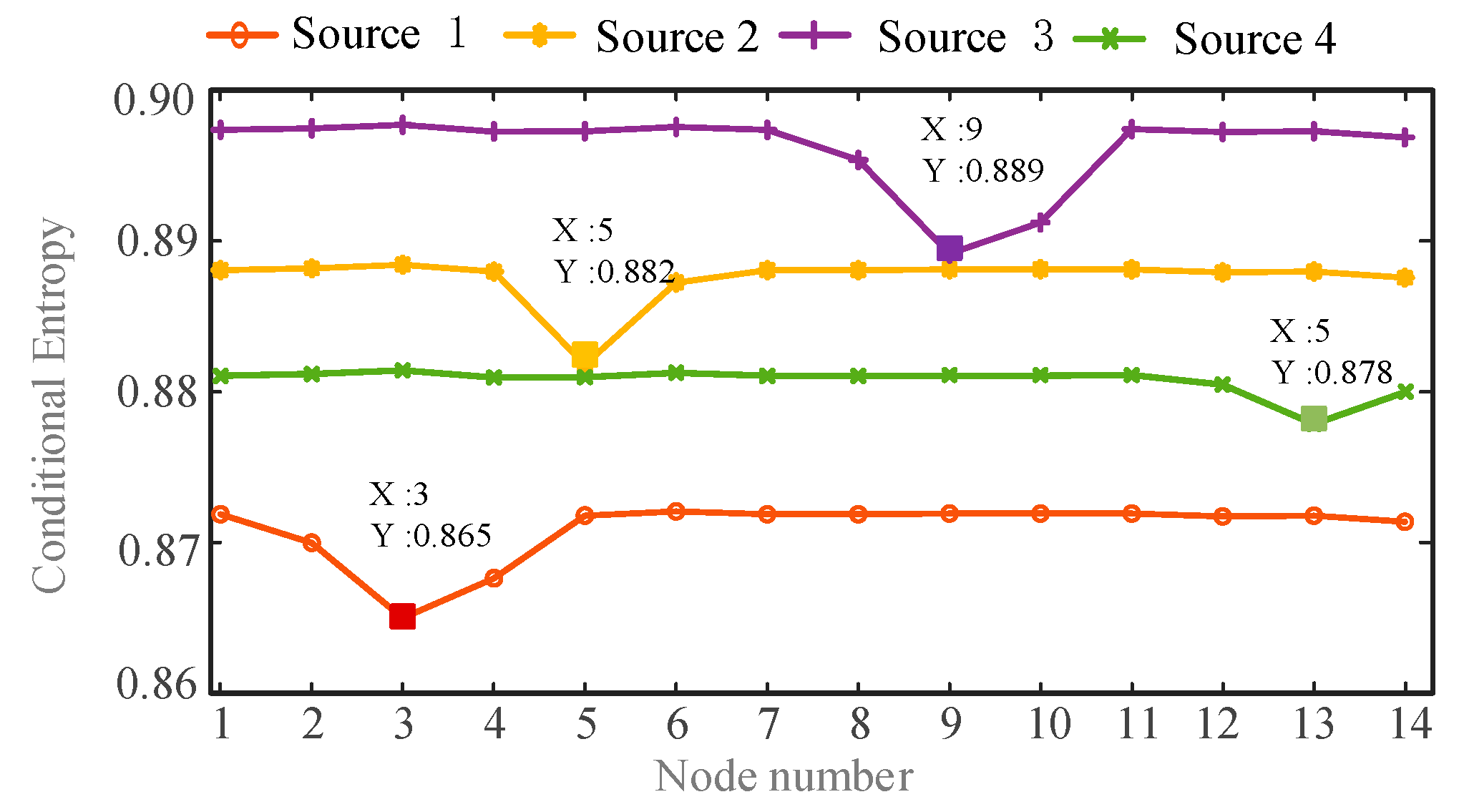
6.4. Identifying the Location of Harmonic Sources Using Minimum Conditional Entropy
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Saxena, D.; Bhaumik, S.; Singh, S.N. Identification of Multiple Harmonic Sources in Power System Using Optimally Placed Voltage Measurement Devices. IEEE Trans. Ind. Electron. 2014, 61, 2483–2492. [Google Scholar] [CrossRef]
- Melo, I.D.; Pereira, J.L.; Ribeiro, P.F.; Variz, A.M.; Oliveira, B.C. Harmonic state estimation for distribution systems based on optimization models considering daily load profiles. Electr. Power Syst. Res. 2019, 170, 303–316. [Google Scholar] [CrossRef]
- Ardakanian, O. Leveraging Sparsity in Distribution Grids: System Identification and Harmonic State Estimation. ACM SIGMETRICS Perform. Eval. Rev. 2019, 46, 84–85. [Google Scholar] [CrossRef]
- Meliopoulos, A.P.S.; Zhang, F.; Zelingher, S. Power system harmonic source estimation. IEEE Trans. Power Deliv. 1994, 9, 1701–1709. [Google Scholar] [CrossRef]
- Heydt, G.T. Identification of harmonic sources by a state estimation technique. IEEE Trans. Power Deliv. 1989, 4, 569–576. [Google Scholar] [CrossRef]
- Lin, W.M.; Lin, C.H.; Tu, K.P.; Wu, C.H. Multiple harmonic source detection and equipment identification with cascade correlation network. IEEE Trans. Power Deliv. 2005, 20, 2166–2173. [Google Scholar] [CrossRef]
- Lu, Z.; Ji, T.Y.; Tang, W.H.; Wu, Q.H. Optimal Harmonic Estimation Using a Particle Swarm Optimizer. IEEE Trans. Power Deliv. 2008, 23, 1166–1174. [Google Scholar] [CrossRef]
- D’Antona, G.; Muscas, C.; Sulis, S. State estimation for the localization of harmonic sources in electric distribution systems. IEEE Trans. Instrum. Meas. 2009, 58, 1462–1470. [Google Scholar] [CrossRef]
- Zang, T.; He, Z.; Fu, L.; Chen, J.; Qian, Q. Harmonic Source Localization Approach Based on Fast Kernel Entropy Optimization ICA and Minimum Conditional Entropy. Entropy 2016, 18, 214. [Google Scholar] [CrossRef]
- Farhoodnea, M.; Mohamed, A.; Shareef, H. A new method for determining multiple harmonic source locations in a power distribution system. In Proceedings of the IEEE International Conference on Power & Energy, Kuala Lumpur, Malaysia, 29 November–1 December 2010. [Google Scholar]
- Bofill, P.; Zibulevsky, M. Underdetermined blind source separation using sparse representations. Signal Process. 2001, 81, 2353–2362. [Google Scholar] [CrossRef]
- Yu, X.; Xu, J.; Hu, D.; Xing, H. A new blind image source separation algorithm based on feedback sparse component analysis. Signal Process. 2013, 93, 288–296. [Google Scholar]
- Li, Y.; Amari, S.I.; Cichocki, A.; Ho, D.W.; Xie, S. Underdetermined blind source separation based on sparse representation. IEEE Trans. Signal Process. 2006, 54, 423–437. [Google Scholar]
- Reju, V.G.; Koh, S.N.; Soon, I.Y. An algorithm for mixing matrix estimation in instantaneous blind source separation. Signal Process. 2009, 89, 1762–1773. [Google Scholar] [CrossRef]
- Yunusa-Kaltungo, A.; Sinha, J.K. Generic vibration-based faults identification approach for identical rotating machines installed on different foundations, VIRM 11-Vibrations in Rotating. Machinery 2016, 11, 499–510. [Google Scholar]
- Yunusa-Kaltungo, A.; Sinha, J.K. Sensitivity analysis of higher order coherent spectra in machine faults diagnosis. Struct. Health Monit. 2016, 15, 555–567. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal Component Analysis, 2nd ed.; Springer-Verlag Series in Statistics; Springer: New York, NY, USA, 2002; pp. 1–518. [Google Scholar]
- Georgiev, P.; Theis, F.; Cichocki, A. Sparse component analysis and blind source separation of underdetermined mixtures. IEEE Trans. Neural Netw. 2005, 16, 992–996. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Output-only modal identification with limited sensors using sparse component analysis. J. Sound Vib. 2013, 332, 4741–4765. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M.; Hester, D. Enhanced sparse component analysis for operational modal identification of real-life bridge structures. Mech. Syst. Signal Process. 2019, 116, 585–605. [Google Scholar] [CrossRef]
- Hyvarinen, A. Fast and robust fixed-point algorithms for independent component analysis. IEEE Trans. Neural Netw. 1999, 10, 626–634. [Google Scholar] [CrossRef]
- Bell, A.J.; Sejnowski, T.J. An information-maximization approach to blind separation and blind deconvolution. Neural Comput. 1995, 7, 1129–1159. [Google Scholar] [CrossRef]
- Amari, S.I.; Cichocki, A.; Yang, H.H. A new learning algorithm for blind signal separation. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 1996; pp. 757–763. [Google Scholar]
- Langlois, D.; Chartier, S.; Gosselin, D. An introduction to independent component analysis: InfoMax and FastICA algorithms. Tutor. Quant. Methods Psychol. 2010, 6, 31–38. [Google Scholar] [CrossRef]
- Behera, S.K. Fast ICA for Blind Source Separation and Its Implementation. Ph.D. Dissertation, National Institutes of Technology, Rourkela, India, 2009; pp. 5–19. [Google Scholar]
- Li, W. Mutual information functions versus correlation functions. J. Stat. Phys. 1990, 60, 823–837. [Google Scholar] [CrossRef]
- Gursoy, E. Harmonic load identification using complex independent component analysis. IEEE Trans. Power Deliv. 2008, 24, 285–292. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | SCA | Fast-ICA |
|---|---|---|
| Underdetermined blind source separation | Yes | No |
| Determine the number of source signals in advance | No | Yes |
| Number of measurement points required | ≥2 | ≥4 |
| Measurement configuration cost | Low | High |
| Configuration scheme | N2, N6, N9 | N2, N6, N9, N12 |
| Injection Node | Harmonic Number | Correlation Coefficient | |
|---|---|---|---|
| SCA | Fast-ICA | ||
| Injection node 1 | 5 | 0.9374 | 0.9300 |
| 7 | 0.9762 | 0.9721 | |
| Injection node 2 | 5 | 0.9723 | 0.9655 |
| 7 | 0.9601 | 0.9593 | |
| Injection node 3 | 5 | 0.9733 | 0.9834 |
| 7 | 0.9682 | 0.9651 | |
| Injection node 4 | 5 | 0.9707 | 0.9677 |
| 7 | 0.9447 | 0.9226 | |
| Injection Point | Harmonic Number | MAE | |
|---|---|---|---|
| SCA | Fast-ICA | ||
| Injection node 1 | 5 | 0.1248 | 0.1358 |
| 7 | 0.1096 | 0.1226 | |
| Injection node 2 | 5 | 0.0801 | 0.1521 |
| 7 | 0.1031 | 0.1323 | |
| Injection node 3 | 5 | 0.0928 | 0.1316 |
| 7 | 0.0912 | 0.1912 | |
| Injection node 4 | 5 | 0.0883 | 0.1833 |
| 7 | 0.1305 | 0.1402 | |
| Injection Point | Harmonic Number | RMSE | |
|---|---|---|---|
| SCA | Fast-ICA | ||
| Injection node 1 | 5 | 0.1482 | 0.1538 |
| 7 | 0.1143 | 0.1234 | |
| Injection node 2 | 5 | 0.0941 | 0.1231 |
| 7 | 0.1081 | 0.1223 | |
| Injection node 3 | 5 | 0.1452 | 0.1466 |
| 7 | 0.1275 | 0.1273 | |
| Injection node 4 | 5 | 0.1098 | 0.1123 |
| 7 | 0.1553 | 0.1562 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, Y.; Yang, H.; Ma, X. Multi-Harmonic Source Localization Based on Sparse Component Analysis and Minimum Conditional Entropy. Entropy 2020, 22, 65. https://doi.org/10.3390/e22010065
Du Y, Yang H, Ma X. Multi-Harmonic Source Localization Based on Sparse Component Analysis and Minimum Conditional Entropy. Entropy. 2020; 22(1):65. https://doi.org/10.3390/e22010065
Chicago/Turabian StyleDu, Yongzhen, Honggeng Yang, and Xiaoyang Ma. 2020. "Multi-Harmonic Source Localization Based on Sparse Component Analysis and Minimum Conditional Entropy" Entropy 22, no. 1: 65. https://doi.org/10.3390/e22010065
APA StyleDu, Y., Yang, H., & Ma, X. (2020). Multi-Harmonic Source Localization Based on Sparse Component Analysis and Minimum Conditional Entropy. Entropy, 22(1), 65. https://doi.org/10.3390/e22010065