Information Dynamic Correlation of Vibration in Nonlinear Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- By establishing the state density matrix of nonlinear mechanical systems, the state characteristics of nonlinear mechanical systems and Lü’s chaotic systems are described. The full-vector multi-scale Rényi entropy based on homology information fusion is constructed. A method is proposed to quanlifies the degree of chaos, nonlinear characteristics and coupling relationship of the system by using Von Neumann entropy and full vector multi-scale Rényi entropy. Von Neumann entropy and Rényi entropy are successfully applied to the field of mechanical system dynamics.
- (2)
- By using Von Neumann entropy and Rényi entropy, the chaotic degree, nonlinear characteristics and coupling relationship of Lü’s chaotic system and nonlinear mechanical system can be quantified, so as to achieve the purpose of mode identification, system time evolution and fault diagnosis.
- (3)
- In the study, we found some rules between Rényi entropy and its scale parameters.
2. Theory
2.1. Von Neumann Entropy and Rényi Entropy
2.2. Compressive Sensing
2.2.1. Theory
- (1)
- Sparse representation of the signal.
- (2)
- The observation matrix is designed to ensure that the dimension is reduced and the loss of signal characteristics is minimized.
- (3)
- By using the minimum L_0 norm optimization algorithm, the approximate sparse coefficient is obtained, and the X is restored from the observed value y.
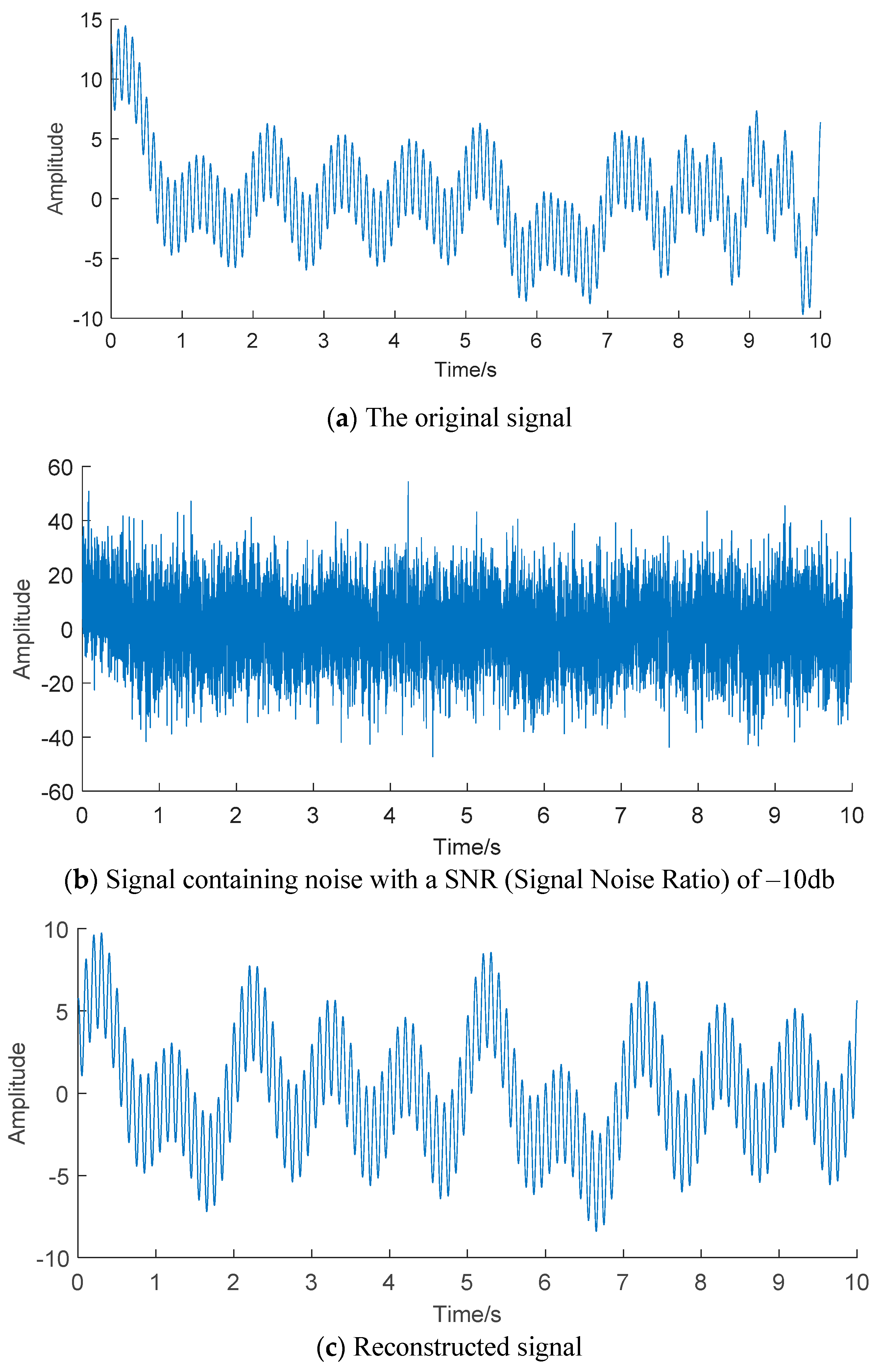
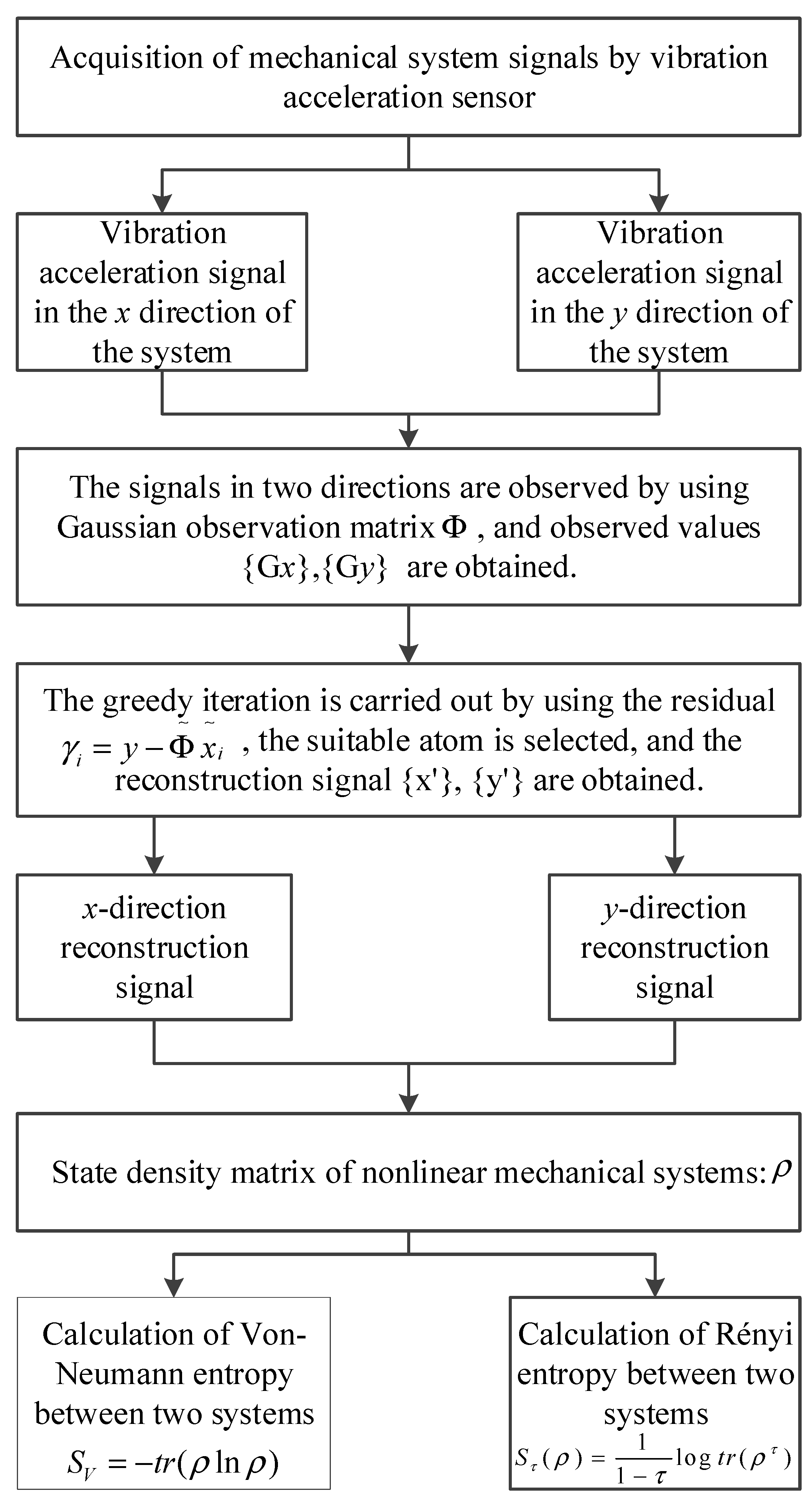
2.2.2. Analysis of Noise Reduction Performance
- (1)
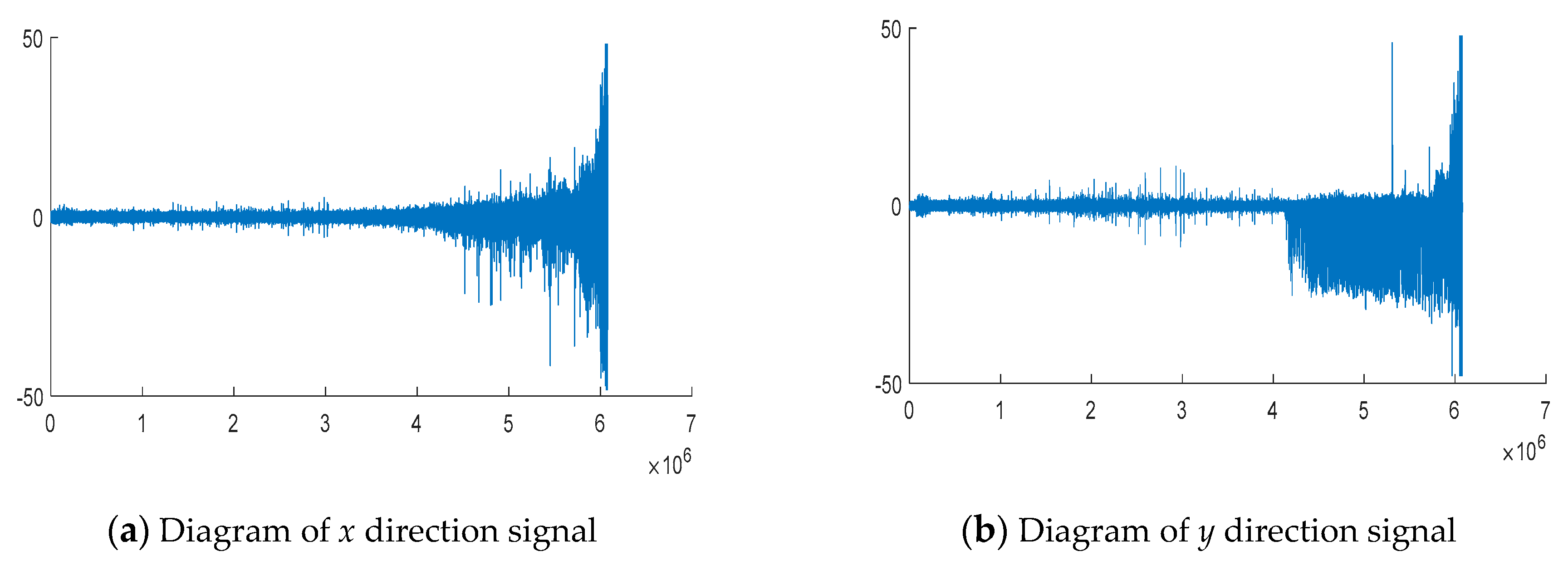
- The acceleration signal of the mechanical system is collected by the acceleration sensor: the x-direction signal and the y-direction signal.
- (2)
- The compressed sensing technology is used to reconstruct and reduce the noise of the signal.
- (3)
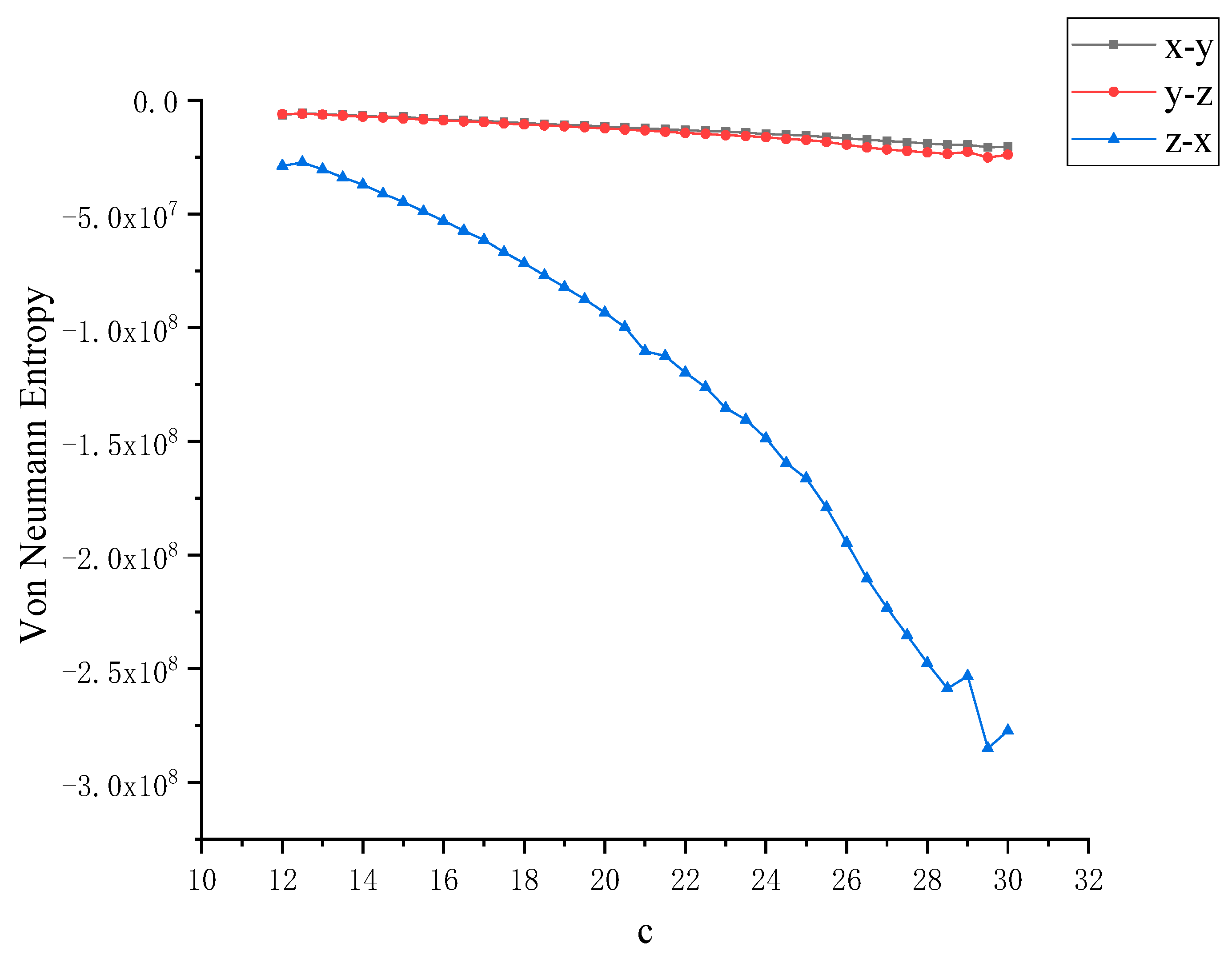
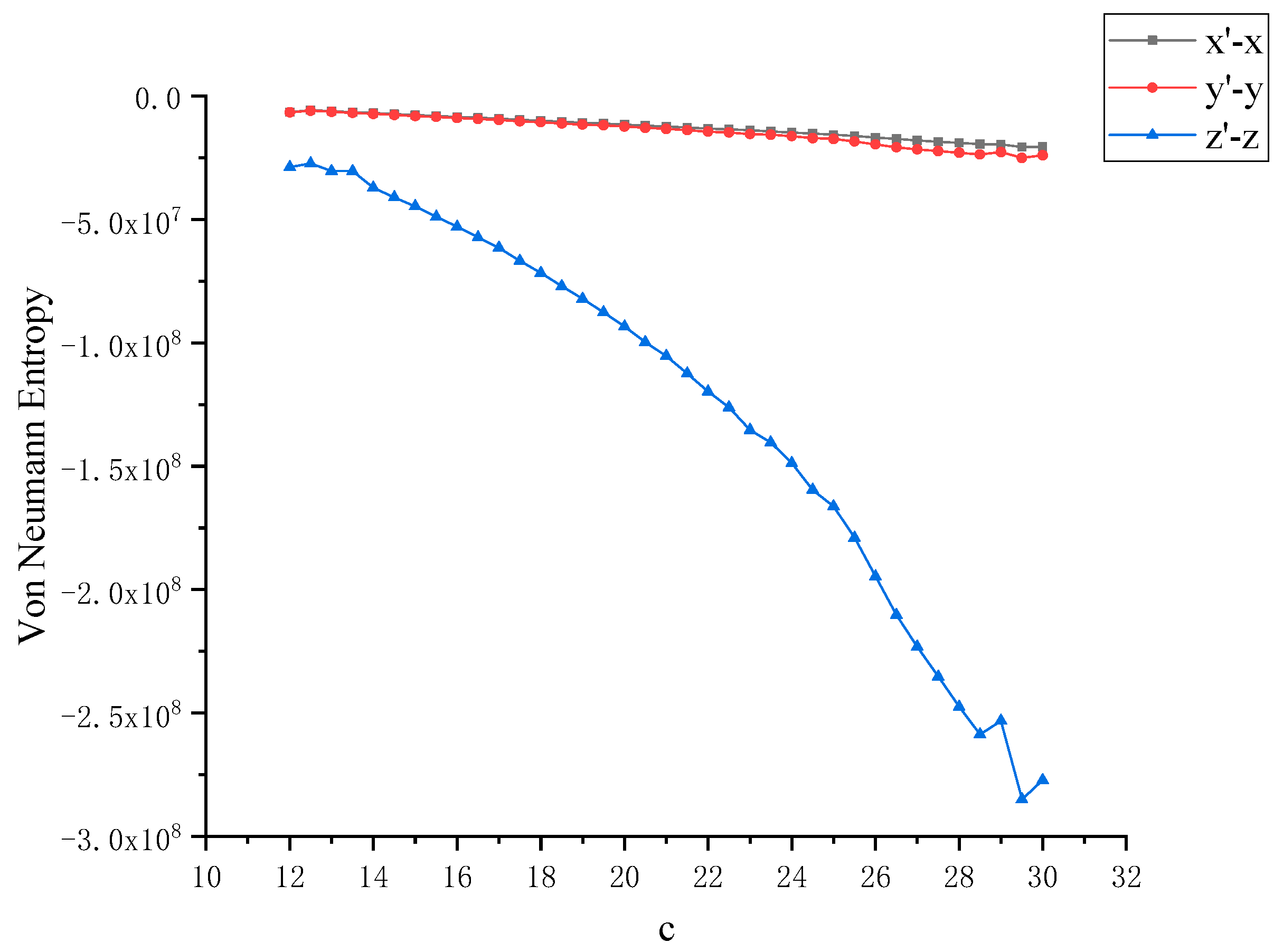
- The state density matrix of the nonlinear mechanical system is constructed, and the degree of coupling between two degrees of freedom signals is calculated by using Von Neumann entropy and Rényi entropy, respectively.
3. Chaotic System Analysis
4. Experimental Study
4.1. Accelerated Life Test of Rolling bearings
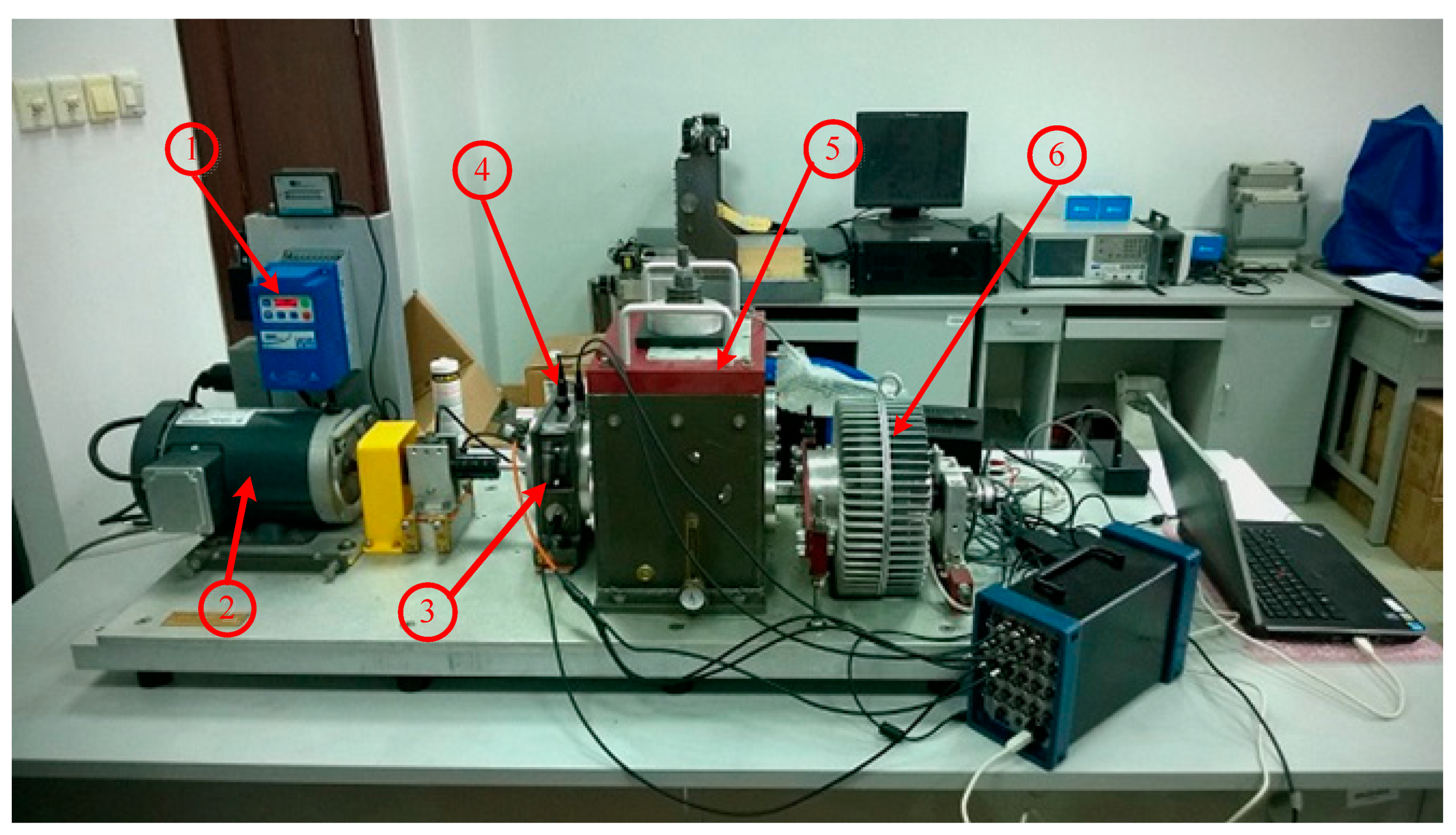
4.1.1. Introduction to the Experiment
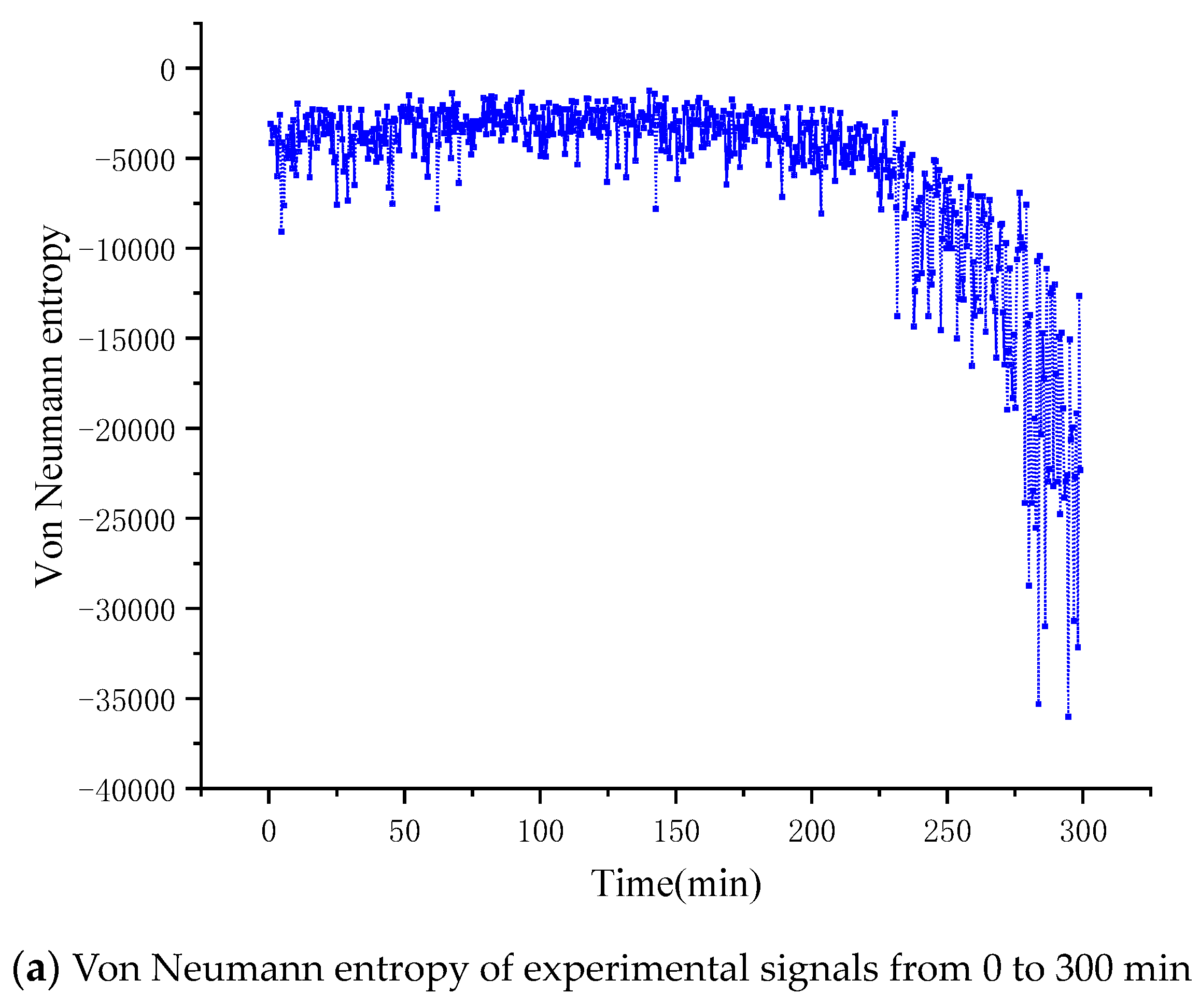
4.1.2. Data Analysis
4.2. Fault Diagnosis Experiment of Planetary Gear Transmission System
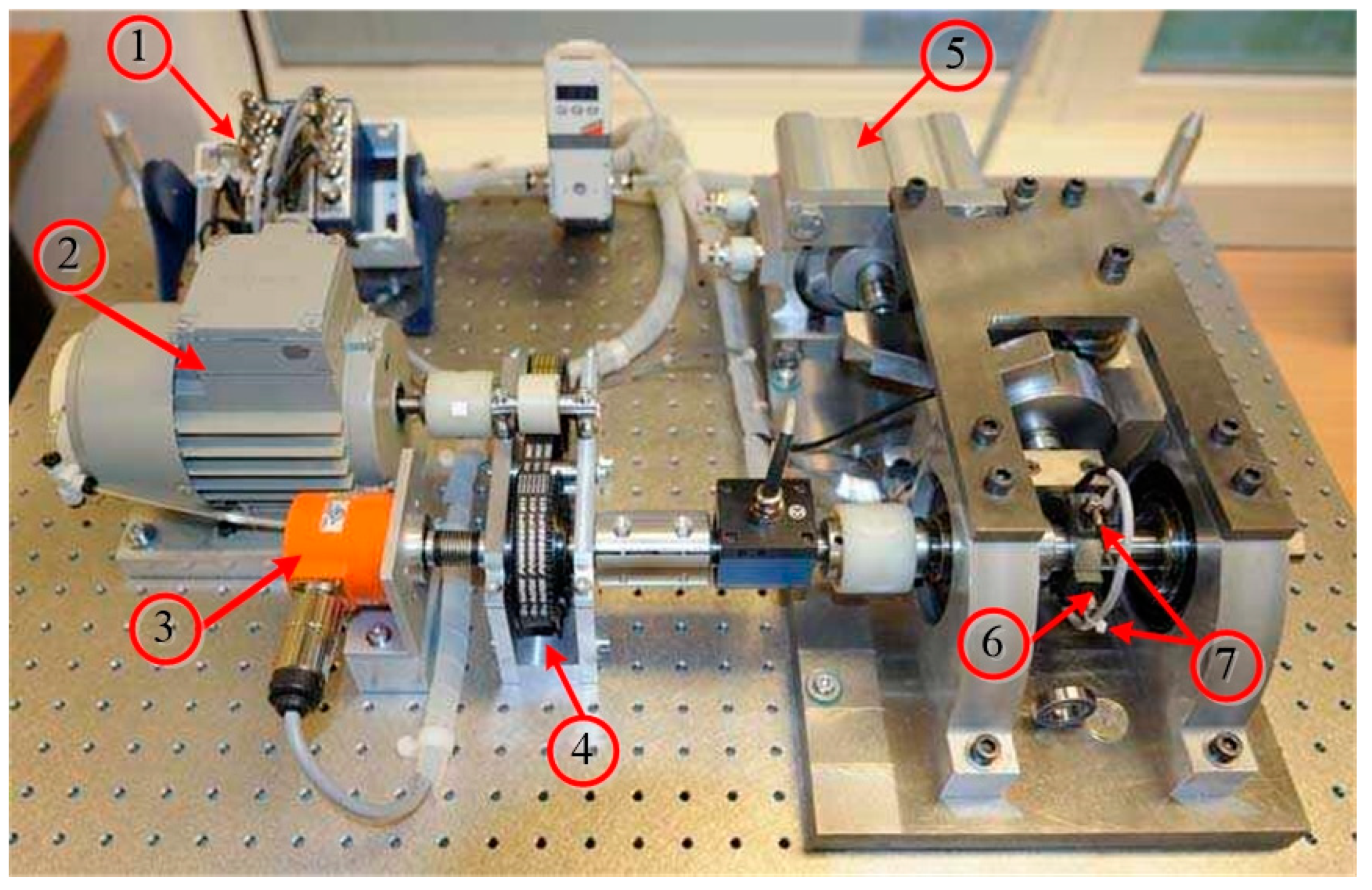
4.2.1. Experimental Introduction
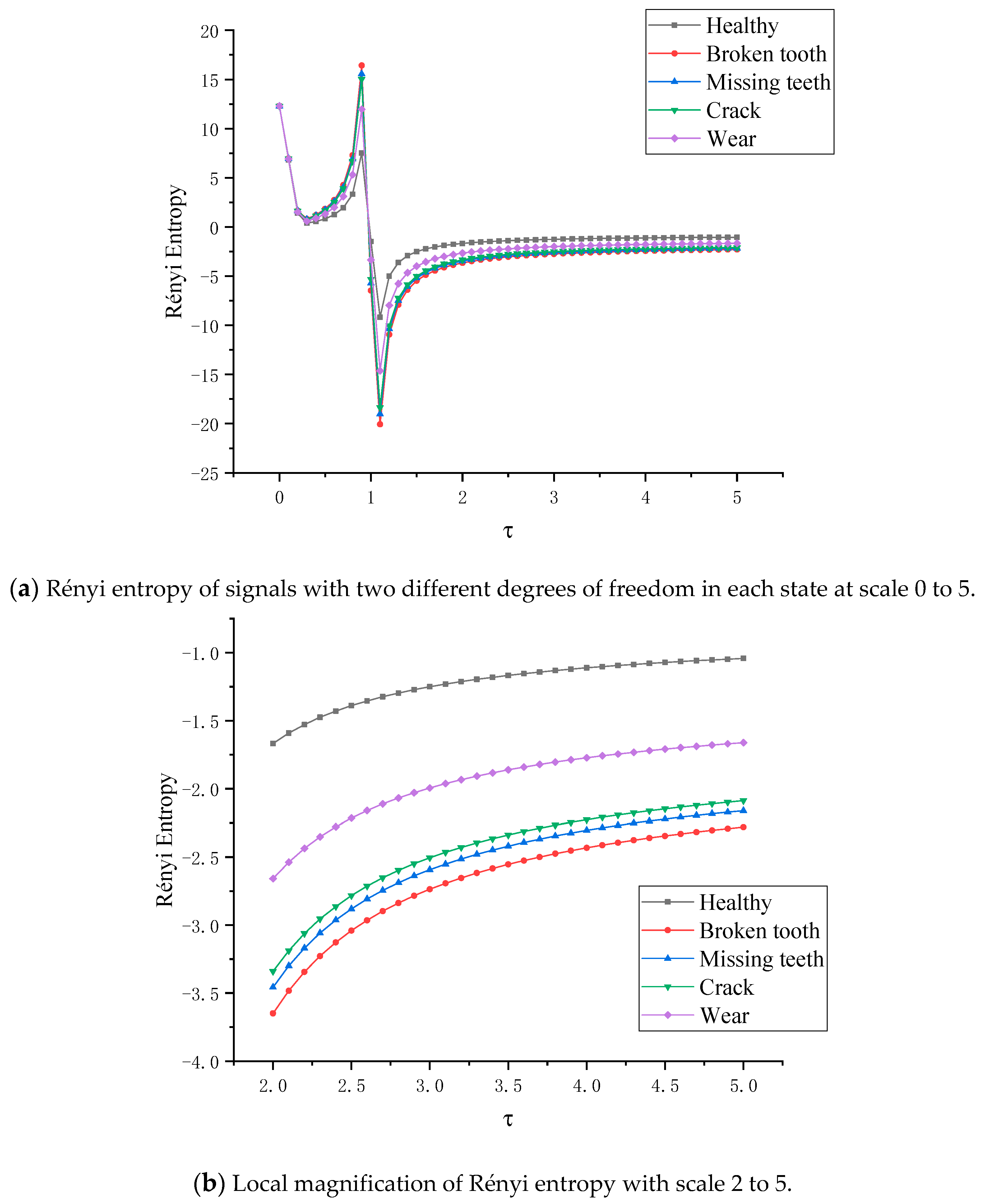
4.2.2. Data Analysis
- (1)
- Acceleration signals in different states of the same system are collected and obtained by accelerometer: two signals x1, y1 in normal state, x2 and y2 in relative fault state.
- (2)
- The compressed sensing technology is used to reconstruct and reduce the noise of the signal.
- (3)
- Vector fusion of homologous signals
- (4)
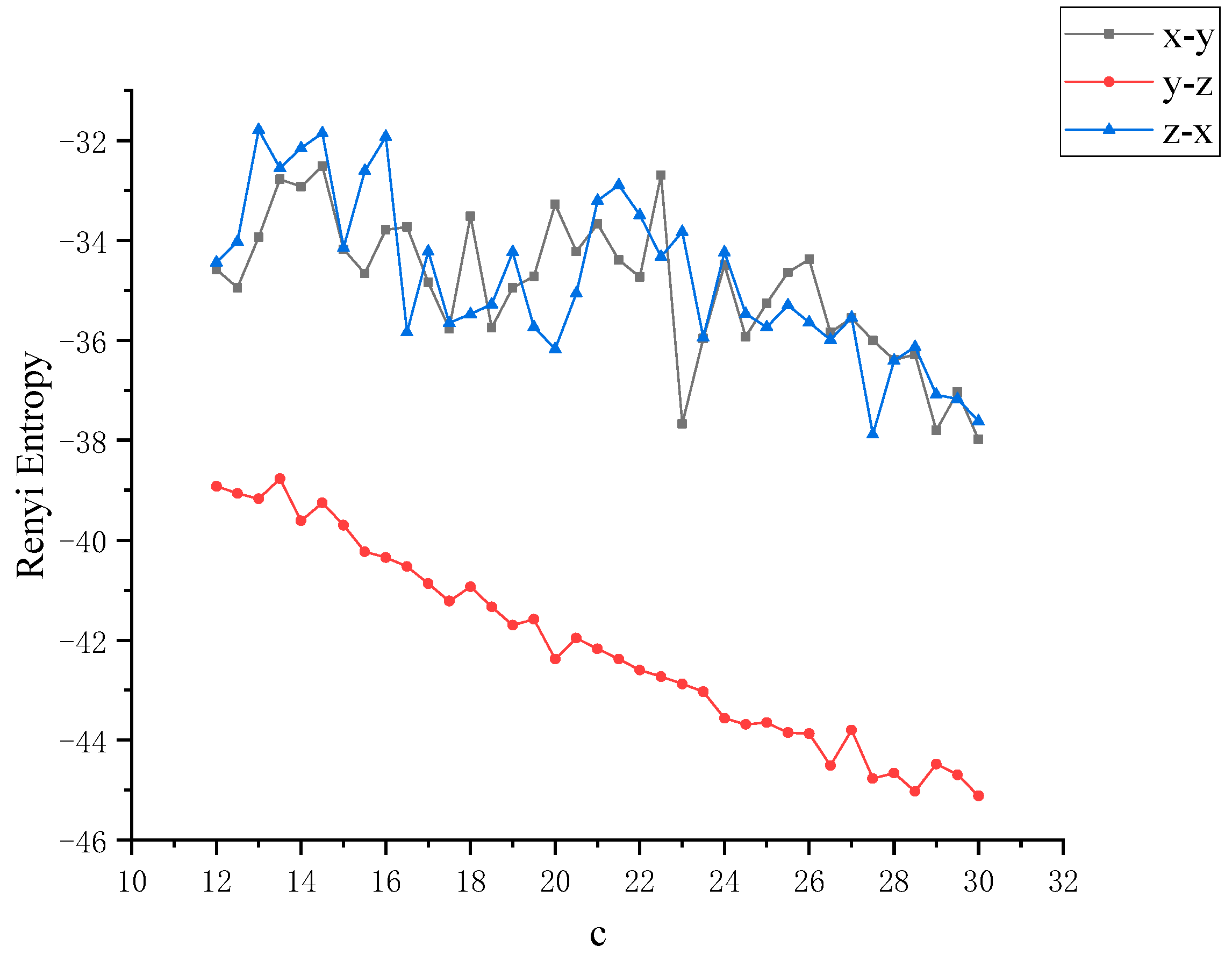
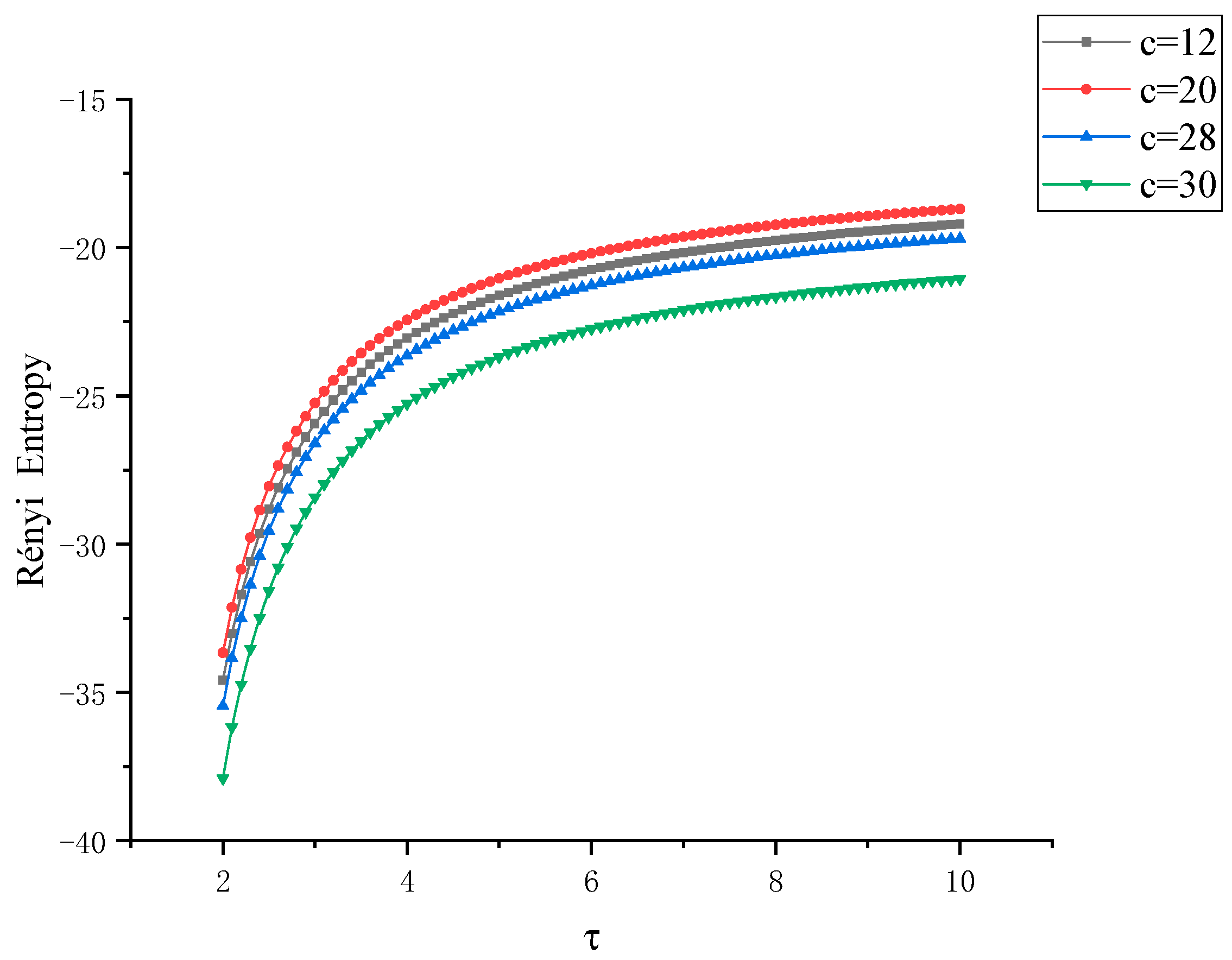
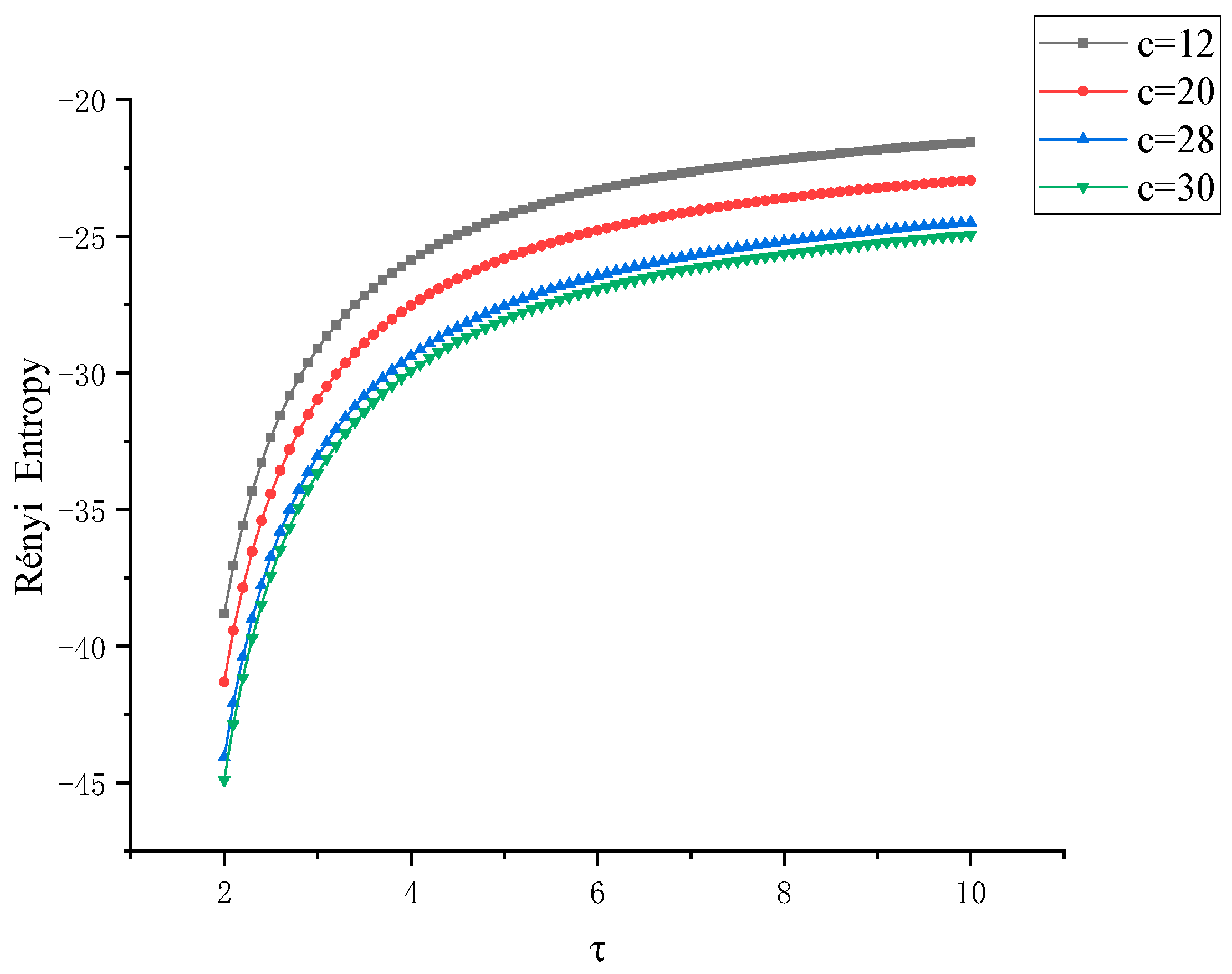
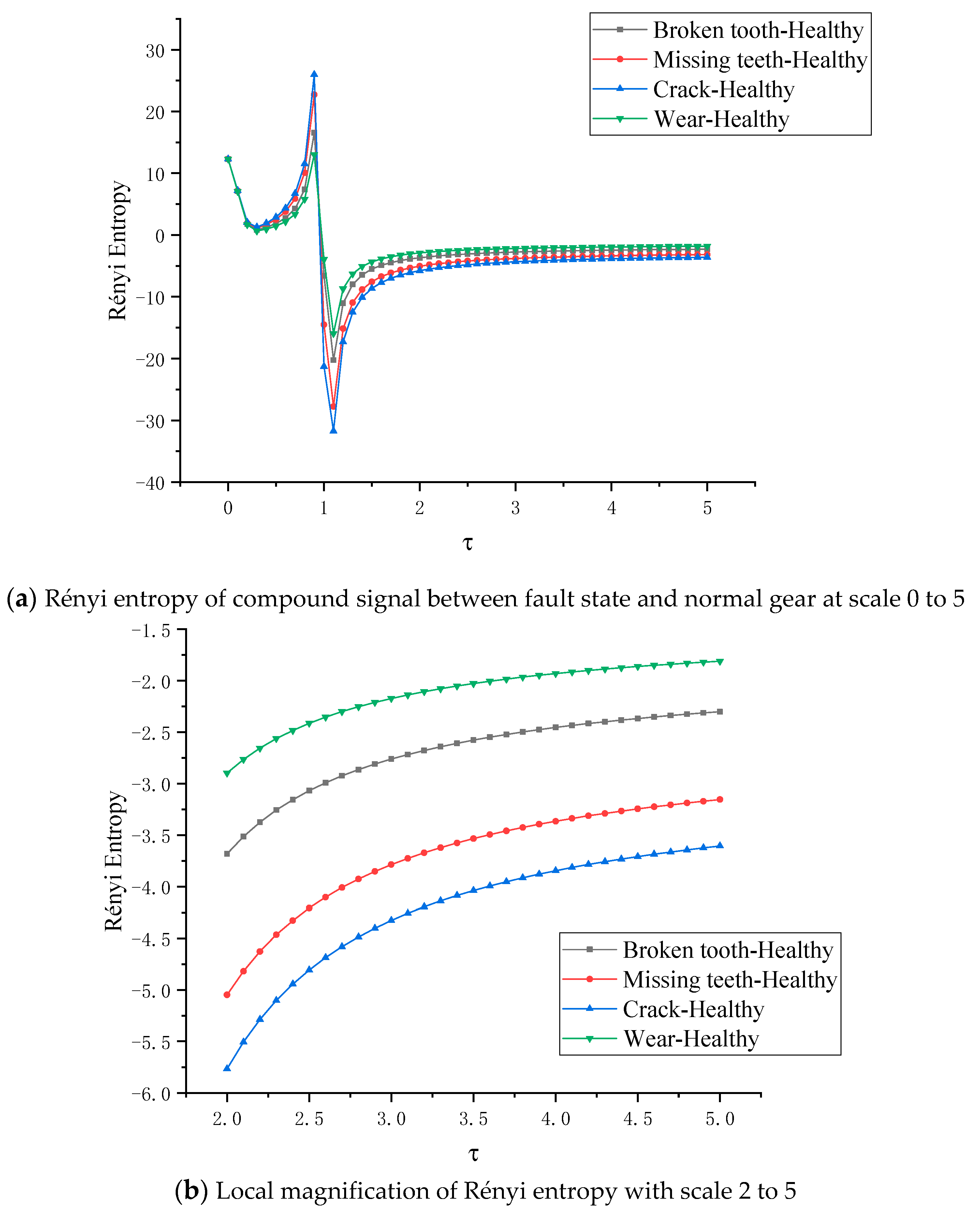
- Construct state density matrix of nonlinear mechanical system and calculate the Rényi entropy between the two systems at different scales.
5. Discussion
6. Conclusions
- (1)
- The state density matrix we have established can well describe the state features of nonlinear mechanical systems in practical tests. The Von Neumann entropy and Rényi entropy are used as indicators to measure the degree of chaos, nonlinear characteristics and coupling between nonlinear systems. By coupling each fault system (or chaotic system) with the healthy system (or non-chaotic system), we can identify the mode of the chaotic system and the nonlinear mechanical system, dynamics inversion and fault diagnosis analysis.
- (2)
- Von Neumann entropy and Rényi entropy, two kinds of measurement methods, can play an important role in the study of chaotic characteristics of L ü systems. These two measures can provide a standard measure of coupling of nonlinear systems and accurately judge the state of the chaotic system.
- (3)
- When using the full vector multi-scale Rényi entropy to study the coupling relationship between the vibration signals of the planetary gear transmission system in different states, there is a certain rule. With the change of Rényi entropy scale parameter, the positive and negative of entropy will change, which is just the expression of different physical meaning, and does not affect the problem of mode identification, dynamic inversion and fault diagnosis of nonlinear mechanical system; When the Rényi entropy scale parameter the Rényi entropy of the multi-stage planetary gear transmission system will converge to a fixed value.
- (4)
- According to the characteristics of low signal-to-noise ratio of mechanical system signal, the noise in vibration signal is reduced by using the compression sensing technology. The experimental signal processing results show that the compression sensing technology has good noise reduction ability and noise robustness.
- (5)
- When the running state of the mechanical system is disturbed by noise, through the calculation of Von Neumann entropy and multi-scale Rényi entropy, the dynamics characteristics of the system are the same, that is, Von Neumann entropy and multi-scale Rényi entropy are robust to the change of the running state of the mechanical system.
Author Contributions
Funding
Conflicts of Interest
References
- Furuya, K.; Nemes, M.C.; Pellegrino, G.Q. Quantum dynamical manifestation of chaotic behavior in the process of entanglement. Phys. Rev. Lett. 1998, 80, 5524. [Google Scholar] [CrossRef]
- Schneider, S.; Milburn, J.G. Entanglement in the steady state of a collective-angular-momentum (Dicke) model. Phys. Rev. A 2002, 65, 042107. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, Y.; Ren, W.; Ding, S. Dynamical entanglement of vibrations in small molecules through an analytically algebraic approach. Phys. Rev. A 2008, 78, 032523. [Google Scholar] [CrossRef]
- Abdel-Aty, M.; El-Shahat, T.M.; Abdel-shafy, F.O. Properties of entropy and entanglement of two-mode nonlinear coherent states. Commun. Phys. 2002, 38, 715. [Google Scholar] [CrossRef]
- Neumann, J.V. Mathematische Grundlagen der Quantenmechanik; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Gu, S.J.; Deng, S.S.; Li, Y.Q.; Lin, H.Q. Entanglement and quantum phase transition in the extended Hubbard model. Phys. Rev. Lett. 2004, 93, 086402. [Google Scholar] [CrossRef] [PubMed]
- Bennett, C.H.; Brassard, G.; Crépeau, C.; Jozsa, R.; Peres, A.; Wootters, W.K. Teleporting an unknown quantum state via dual classical and Einstein-Podolsky-Rosen channels. Phys. Rev. Lett. 1993, 70, 1895. [Google Scholar] [CrossRef] [PubMed]
- Cleve, R.; Gottesman, D.; Lo, H.K. How to share a quantum secret. Phys. Rev. Lett. 1999, 83, 648. [Google Scholar] [CrossRef]
- Brissaud, J.B. The meanings of entropy. Entropy 2005, 7, 68–96. [Google Scholar] [CrossRef]
- Vitullo, D.L.; Raymer, M.G.; Smith, B.J.; Karpiński, M.; Mejling, L.; Rottwitt, K. Entanglement swapping for generation of heralded time-frequency-entangled photon pairs. Phys. Rev. A 2018, 98, 023836. [Google Scholar] [CrossRef]
- Osenda, O.; Serra, P. Scaling of the Von Neumann entropy in a two-electron system near the ionization threshold. Phys. Rev. A 2007, 75, 042331. [Google Scholar] [CrossRef]
- Malinovsky, V.S.; Sola, I.R. Phase-controlled collapse and revival of entanglement of two interacting qubits. Phys. Rev. Lett. 2006, 96, 050502. [Google Scholar] [CrossRef] [PubMed]
- Bennett, C.H.; Brassard, G.; Popescu, S.; Schumacher, B.; Smolin, J.A.; Wootters, W.K. Purification of noisy entanglement and faithful teleportation via noisy channels. Phys. Rev. Lett. 1996, 76, 722. [Google Scholar] [CrossRef] [PubMed]
- Vedral, V.; Plenio, M.B.; Rippin, M.A.; Knight, P.L. Quantifying entanglement. Phys. Rev. Lett. 1997, 78, 2275. [Google Scholar] [CrossRef]
- Yuan, Q.; Hou, X.W. Entropy, energy, and entanglement of localized states in bent triatomic molecules. Int. J. Mod. Phys. B 2017, 31, 1750088. [Google Scholar] [CrossRef]
- Vidal, G.; Latorre, J.I.; Rico, E.; Kitaev, A. Entanglement in quantum critical phenomena. Phys. Rev. Lett. 2003, 90, 227902. [Google Scholar] [CrossRef]
- De Oliveira, T.R.; Rigolin, G.; de Oliveira, M.C.; Miranda, E. Symmetry-breaking effects upon bipartite and multipartite entanglement in the X Y model. Phys. Rev. A 2008, 77, 032325. [Google Scholar] [CrossRef]
- Wang, X.; Ghose, S.; Sanders, B.C.; Hu, B. Entanglement as a signature of quantum chaos. Phys. Rev. E 2004, 70, 016217. [Google Scholar] [CrossRef]
- Browaeys, A.; Barredo, D.; Lahaye, T. Experimental investigations of dipole–dipole interactions between a few Rydberg atoms. J. Phys. B At. Mol. Opt. Phys. 2016, 49, 152001. [Google Scholar] [CrossRef]
- Saffman, M. Quantum computing with atomic qubits and Rydberg interactions: Progress and challenges. J. Phys. B At. Mol. Opt. Phys. 2016, 49, 202001. [Google Scholar] [CrossRef]
- Dorfman, K.E.; Schlawin, F.; Mukamel, S. Stimulated Raman spectroscopy with entangled light: Enhanced resolution and pathway selection. J. Phys. Chem. Lett. 2014, 5, 2843–2849. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, L.-B.; Guo, G.C. Generation of entangled states in cavity QED. Phys. Rev. A 2005, 72, 034304. [Google Scholar]
- Liu, Y.X.; Özdemir, Ş.K.; Miranowicz, A.; Koashi, M.; Imoto, N. Exciton entanglement in two coupled semiconductor microcrystallites. J. Phys. A Math. Gen. 2004, 37, 4423. [Google Scholar] [CrossRef]
- Xu, K.; Chen, J.J.; Zeng, Y.; Zhang, Y.R.; Song, C.; Liu, W.; Huang, K. Emulating many-body localization with a superconducting quantum processor. Phys. Rev. Lett. 2018, 120, 050507. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q. Quantum Entanglement and Quantum Computation. Comput. Sci. 2006, 12, 230–234. [Google Scholar]
- Neill, C.; Roushan, P.; Kechedzhi, K.; Boixo, S.; Isakov, S.V.; Smelyanskiy, V.; Megrant, A.; Chiaro, B.; Dunsworth, A.; Arya, K.; et al. A blueprint for demonstrating quantum supremacy with superconducting qubits. Science 2018, 360, 195–199. [Google Scholar] [CrossRef] [PubMed]
- Micheli, A.; Jaksch, D.; Cirac, J.I.; Zoller, P. Many-particle entanglement in two-component Bose-Einstein condensates. Phys. Rev. A 2003, 67, 013607. [Google Scholar] [CrossRef]
- Choi, S.; Bigelow, N.P. Quantum squeezing and entanglement in a two-mode Bose-Einstein condensate with time-dependent Josephson-like coupling. Phys. Rev. A 2005, 72, 033612. [Google Scholar] [CrossRef]
- Hou, X.W.; Chen, J.H.; Hu, B. Entanglement and bifurcation in the integrable dimer. Phys. Rev. A 2005, 71, 034302. [Google Scholar] [CrossRef]
- Sudheesh, C.; Lakshmibala, S.; Balakrishnan, V. Wave packet dynamics of entangled two-mode states. J. Phys. B At. Mol. Opt. Phys. 2006, 39, 3345. [Google Scholar] [CrossRef][Green Version]
- Hou, X.W.; Wan, M.F.; Ma, Z.Q. Entropy and negativity of Fermi-resonance coupling vibrations in a spectroscopic Hamiltonian. Phys. Rev. A 2009, 79, 022308. [Google Scholar] [CrossRef]
- Vedral, V.; Plenio, M.B. Entanglement measures and purification procedures. Phys. Rev. A 1998, 57, 1619. [Google Scholar] [CrossRef]
- Feng, H.; Li, P.; Zheng, Y.; Ding, S. Lie algebraic approach to dynamical entanglement of vibrations in triatomic molecules. Prog. Theor. Phys. 2010, 123, 215–225. [Google Scholar] [CrossRef][Green Version]
- Abdel-Aty, M. Information entropy of a time-dependent three-level trapped ion interacting with a laser field. J. Phys. A Math. Gen. 2005, 38, 8589. [Google Scholar] [CrossRef]
- Hou, X.W.; Chen, J.H.; Ma, Z.Q. Dynamical entanglement of vibrations in an algebraic model. Phys. Rev. A 2006, 74, 062513. [Google Scholar] [CrossRef]
- Kis, Z.; Janszky, J.; Adam, P.; Vinogradov, A.V.; Kobayashi, T. Entangled vibrational states in polyatomic molecules. Phys. Rev. A 1996, 54, 5110. [Google Scholar] [CrossRef]
- Ecker, C. Entanglement Entropy from Numerical Holography. arXiv Prepr. 2018, arXiv:1809.05529. [Google Scholar]
- Wang, C.F.; Fang, M.-F. Quantum entanglement in a two-dimensional ion trap. Chin. Phys. 2003, 12, 287. [Google Scholar]
- Xiang, L.; De-Wei, W.; Xi, W.; Qiang, M.; Kun, C.; Chun-Yan, Y. A method of evaluating the quality of dual-path entangled quantum microwave signal generated based on Von Neumann entropy. Acta Phys. Sin. 2016, 65. [Google Scholar] [CrossRef]
- Albiez, M.; Gati, R.; Fölling, J.; Hunsmann, S.; Cristiani, M.; Oberthaler, M.K. Direct observation of tunneling and nonlinear self-trapping in a single bosonic Josephson junction. Phys. Rev. Lett. 2005, 95, 010402. [Google Scholar] [CrossRef]
- Cheng, T.; Brown, A. Quantum computing based on vibrational eigenstates: Pulse area theorem analysis. J. Chem. Phys. 2006, 124, 034111. [Google Scholar] [CrossRef]
- Zúñiga, J.; Picón JA, G.; Bastida, A.; Requena, A. Optimal internal coordinates, vibrational spectrum, and effective hamiltonian for ozone. J. Chem. Phys. 2007, 126, 244305. [Google Scholar] [CrossRef] [PubMed]
- Mirrahimi, M.; Turinici, G.; Rouchon, P. Reference trajectory tracking for locally designed coherent quantum controls. J. Phys. Chem. A 2005, 109, 2631–2637. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Amirat, Y.; Benbouzid ME, H.; Al-Ahmar, E.; Bensaker, B.; Turri, S. A brief status on condition monitoring and fault diagnosis in wind energy conversion systems. Renew. Sustain. Energy Rev. 2009, 13, 2629–2636. [Google Scholar] [CrossRef]
- Adams, D.; White, J.; Rumsey, M.; Farrar, C. Structural health monitoring of wind turbines: Method and application to a HAWT. Wind Energy 2011, 14, 603–623. [Google Scholar] [CrossRef]
- Kinet, D.; Mégret, P.; Goossen, K.; Qiu, L.; Heider, D.; Caucheteur, C. Fiber Bragg grating sensors toward structural health monitoring in composite materials: Challenges and solutions. Sensors 2014, 14, 7394–7419. [Google Scholar] [CrossRef] [PubMed]
- Di Sante, R. Fibre optic sensors for structural health monitoring of aircraft composite structures: Recent advances and applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef] [PubMed]
- Li, H.N.; Yi, T.H.; Ren, L.; Li, D.S.; Huo, L.S. Reviews on innovations and applications in structural health monitoring for infrastructures. Struct. Monit. Maint. 2014, 1, 1–45. [Google Scholar] [CrossRef]
- Bhuiyan MZ, A.; Wang, G.; Cao, J.; Wu, J. Sensor placement with multiple objectives for structural health monitoring. ACM Trans. Sens. Netw. 2014, 10, 68. [Google Scholar] [CrossRef]
- Martinez-Luengo, M.; Kolios, A.; Wang, L. Structural health monitoring of offshore wind turbines: A review through the Statistical Pattern Recognition Paradigm. Renew. Sustain. Energy Rev. 2016, 64, 91–105. [Google Scholar] [CrossRef]
- Wang, H.; Ke, Y.; Song, L.; Tang, G.; Chen, P. A sparsity-promoted decomposition for compressed fault diagnosis of roller bearings. Sensors 2016, 16, 1524. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Baraniuk, R.G. Compressive sensing. IEEE Signal Process. Mag. 2007, 24, 118–120. [Google Scholar] [CrossRef]
- Foucart, A.; Rauhut, H. A Mathematical Introduction to Compressive Sensing; Birkhäuser: Basel, Switzerland, 2013. [Google Scholar]
- Dai, W.; Milenkovic, O. Subspace pursuit for compressive sensing signal reconstruction. IEEE Trans. Inf. Theory 2009, 55, 2230–2249. [Google Scholar] [CrossRef]
- Boufounos, P.T.; Baraniuk, R.G. 1-bit compressive sensing. In Proceedings of the 2008 42nd Annual Conference on Information Sciences and Systems, Princeton, NJ, USA, 19–21 March 2008; pp. 16–21. [Google Scholar]
- Baron, D.; Sarvotham, S.; Baraniuk, R.G. Bayesian compressive sensing via belief propagation. IEEE Trans. Signal Process. 2009, 58, 269–280. [Google Scholar] [CrossRef]
- Liu, Y.; Long, Z.; Zhu, C. Image completion using low tensor tree rank and total variation minimization. IEEE Trans. Multimed. 2018, 21, 338–350. [Google Scholar] [CrossRef]
- Duarte, M.F.; Baraniuk, R.G. Kronecker compressive sensing. IEEE Trans. Image Process. 2011, 21, 494–504. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, S.; Huang, X.; Chen, B.; Zhu, C. Hybrid CS-DMRI: Periodic time-variant subsampling and omnidirectional total variation based reconstruction. IEEE Trans. Med. Imaging 2017, 36, 2148–2159. [Google Scholar] [CrossRef]
- Gurbuz, A.C.; McClellan, J.H.; Scott, W.R. A compressive sensing data acquisition and imaging method for stepped frequency GPRs. IEEE Trans. Signal Process. 2009, 57, 2640–2650. [Google Scholar] [CrossRef]
- Alonso, M.T.; López-Dekker, P.; Mallorquí, J.J. A novel strategy for radar imaging based on compressive sensing. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4285–4295. [Google Scholar] [CrossRef]
- Liu, Y.; De Vos, M.; Van Huffel, S. Compressed sensing of multichannel EEG signals: the simultaneous cosparsity and low-rank optimization. IEEE Trans. Biomed. Eng. 2015, 62, 2055–2061. [Google Scholar] [CrossRef]
- Dixon, A.M.; Allstot, E.G.; Gangopadhyay, D.; Allstot, D.J. Compressed sensing system considerations for ECG and EMG wireless biosensors. IEEE Trans. Biomed. Circuits Syst. 2012, 6, 156–166. [Google Scholar] [CrossRef] [PubMed]
- Goyal, D.; Pabla, B.S. The vibration monitoring methods and signal processing techniques for structural health monitoring: A review. Arch. Comput. Methods Eng. 2016, 23, 585–594. [Google Scholar] [CrossRef]
- Bohr, N. Can quantum-mechanical description of physical reality be considered complete? Phys. Rev. 1935, 48, 696. [Google Scholar] [CrossRef]
- Kallin, A.B.; González, I.; Hastings, M.B.; Melko, R.G. Valence bond and von Neumann entanglement entropy in Heisenberg ladders. Phys. Rev. Lett. 2009, 103, 117203. [Google Scholar] [CrossRef] [PubMed]
- Hastings, M.B.; González, I.; Kallin, A.B.; Melko, R.G. Measuring Renyi entanglement entropy in quantum Monte Carlo simulations. Phys. Rev. Lett. 2010, 104, 157201. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z. The Limitations of Rényi’s Generalized Entropy. J. Biomath. 1996, 20, 20–26. [Google Scholar]
- Gemmeke, J.F.; Cranen, B. Noise reduction through compressed sensing. In Proceedings of the 9th Annual Conference of the International Speech Communication Association (INTERSPEECH 2008), Brisbane, Australia, 22–26 September 2008. [Google Scholar]
- Chen, A.; Lu, J.; Lü, J.; Yu, S. Generating hyperchaotic Lü attractor via state feedback control. Phys. A Stat. Mech. Its Appl. 2006, 364, 103–110. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 2002, 12, 659–661. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G.; Zhang, S. Dynamical analysis of a new chaotic attractor. Int. J. Bifurc. Chaos 2002, 12, 1001–1015. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G.; Cheng, D. A new chaotic system and beyond: The generalized Lorenz-like system. Int. J. Bifurc. Chaos 2004, 14, 1507–1537. [Google Scholar] [CrossRef]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Chebel-Morello, B.; Zerhouni, N.; Varnier, C. PRONOSTIA: An experimental platform for bearings accelerated degradation tests. In Proceedings of the IEEE International Conference on Prognostics and Health Management, PHM’12, Beijing, China, 23–25 May 2012; pp. 1–8, IEEE Catalog Number: CPF12PHM-CDR. [Google Scholar]
- Soualhi, A.; Medjaher, K.; Zerhouni, N. Bearing health monitoring based on Hilbert–Huang transform, support vector machine, and regression. IEEE Trans. Instrum. Meas. 2014, 64, 52–62. [Google Scholar] [CrossRef]
- Niu, G.; Qian, F.; Choi, B.K. Bearing life prognosis based on monotonic feature selection and similarity modeling. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 3183–3193. [Google Scholar] [CrossRef]
- Cheng, G.; Chen, X.; Li, H.; Li, P.; Liu, H. Study on planetary gear fault diagnosis based on entropy feature fusion of ensemble empirical mode decomposition. Measurement 2016, 91, 140–154. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Li, G.; Xu, M.; Huang, W. A fault diagnosis scheme for planetary gearboxes using modified multi-scale symbolic dynamic entropy and mRMR feature selection. Mech. Syst. Signal Process. 2017, 91, 295–312. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Liu, C.; Chen, X. Study on planetary gear fault diagnosis based on variational mode decomposition and deep neural networks. Measurement 2018, 130, 94–104. [Google Scholar] [CrossRef]
- Kuai, M.; Cheng, G.; Pang, Y.; Li, Y. Research of planetary gear fault diagnosis based on permutation entropy of CEEMDAN and ANFIS. Sensors 2018, 18, 782. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Pang, Y.; Kuai, M. Planetary gear fault diagnosis via feature image extraction based on multi central frequencies and vibration signal frequency Spectrum. Sensors 2018, 18, 1735. [Google Scholar] [CrossRef]
- Duan, F.; Han, J.; Dong, J.; LI, L. Research on Key Technologies of compatibility of full vector spectrum system. Mech. Des. Manuf. 2009, 206–220. [Google Scholar]



















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Yang, G.; Zhang, Q.; Tan, S.; Hou, S. Information Dynamic Correlation of Vibration in Nonlinear Systems. Entropy 2020, 22, 56. https://doi.org/10.3390/e22010056
Wu Z, Yang G, Zhang Q, Tan S, Hou S. Information Dynamic Correlation of Vibration in Nonlinear Systems. Entropy. 2020; 22(1):56. https://doi.org/10.3390/e22010056
Chicago/Turabian StyleWu, Zhe, Guang Yang, Qiang Zhang, Shengyue Tan, and Shuyong Hou. 2020. "Information Dynamic Correlation of Vibration in Nonlinear Systems" Entropy 22, no. 1: 56. https://doi.org/10.3390/e22010056
APA StyleWu, Z., Yang, G., Zhang, Q., Tan, S., & Hou, S. (2020). Information Dynamic Correlation of Vibration in Nonlinear Systems. Entropy, 22(1), 56. https://doi.org/10.3390/e22010056