2.1. VMD Method
VMD is a new method of modal decomposition, which introduces signal decomposition into the variational model to achieve adaptive decomposition of the signal by looking for the optimal solution of the constrained variational model, and decomposes the input signal into a series of IMF in different frequency bands [
31]. VMD defined IMF as amplitude modulated frequency modulated(AM-FM) signal, such that:
where
and
represent time and the envelope,
and
denote the phase and the IMFs.
Each IMF has a center frequency and limited bandwidth. The variational problem of VMD is to find modal functions , so that the sum of all IMF estimated bandwidths is the smallest. The constraint is that the sum of the modal functions is the input signal . The center frequency and bandwidth of the modal function are estimated by:
(1) Performing Hilbert transform on each modal function
to get the analytical signal of each modal function:
(2) Using the correction index
to modulate the spectrum of each modal function to its respective baseband:
(3) Calculating the squared norm
of the gradient of the demodulation signal in (3), and estimating the bandwidth of each modal function. The corresponding constraint variation problem is:
where,
represents the processed signal,
is the number of IMFs, ∗ represent convolution.
is the decomposed mono-component.
is the center frequency for each decomposed component.
is the inverse of the function with respect to
,
and
stand for impulse response and imaginary unit.
In order to solve the variational problem with the constraint condition in (4) into an unconstrained variational problem, the augmented Lagrangian function
is introduced as follows:
where
and
are the Lagrangian multiplier and balancing parameter.
Solve the extended Lagrangian function in (4) using the alternating direction multiplier algorithm. The specific steps are as follows:
(1) Initialization , , , ;
(2) Execution loop ;
(3) For
, update the fan functions
and
:
(4) Update
:
where ∧ and
indicate Fourier transform and time step.
(5) Repeat steps (3)–(5) until the iteration constraint condition is satisfied:
where
is the accuracy for convergence. The iteration is ended, and
IMF components with the smallest sum of bandwidths are obtained.
2.2. FDE Method
FDE is susceptible to changes in the synchronization frequency, amplitude value, and time-series bandwidth, and does not require the ordering of the amplitude values of each embedded vector, nor the distance between adjacent embedding dimensions; thus, it is very fast [
27], and also solves the problem that PE will lose amplitude information. Given a set of time series
with a sequence length of
, the FDE method is introduced as follows:
(1) First, are mapped to classes with integer indices from 1 to using the normal cumulative distribution function (NCDF). The classified signal is .
(2) Time series is created based on , , where is the embedded dimension, is the time delay. Each time series is mapped to a dispersion patter , where . The number of possible dispersion patterns assigned to each vector is equal to . since the signal has elements and each can be one of the integers from to .
(3) For each potential dispersion mode
, the relative frequency is:
where, # means cardinality, in fact,
reveals that the number of distribution models
allocated to
, divided by the gross number of embedded signals, embedded dimension of which is
.
(4) Lastly, according to the calculation methods of entropy, the FDE is calculated as follows:
where
is the embedded dimension,
is the time delay, and
is the class number.
As an example, let us have a signal . We set , , , leading to potential fluctuation-based dispersion patterns, . Then, are linearly mapped into two classes with integer indices from 1 to 2 . Afterwards, a window with length 3 moves along the time series and the differences between adjacent elements are calculated . Afterwards, the number of each fluctuation-based dispersion pattern is counted. Finally, using Equation (11), the DispEn value of is .
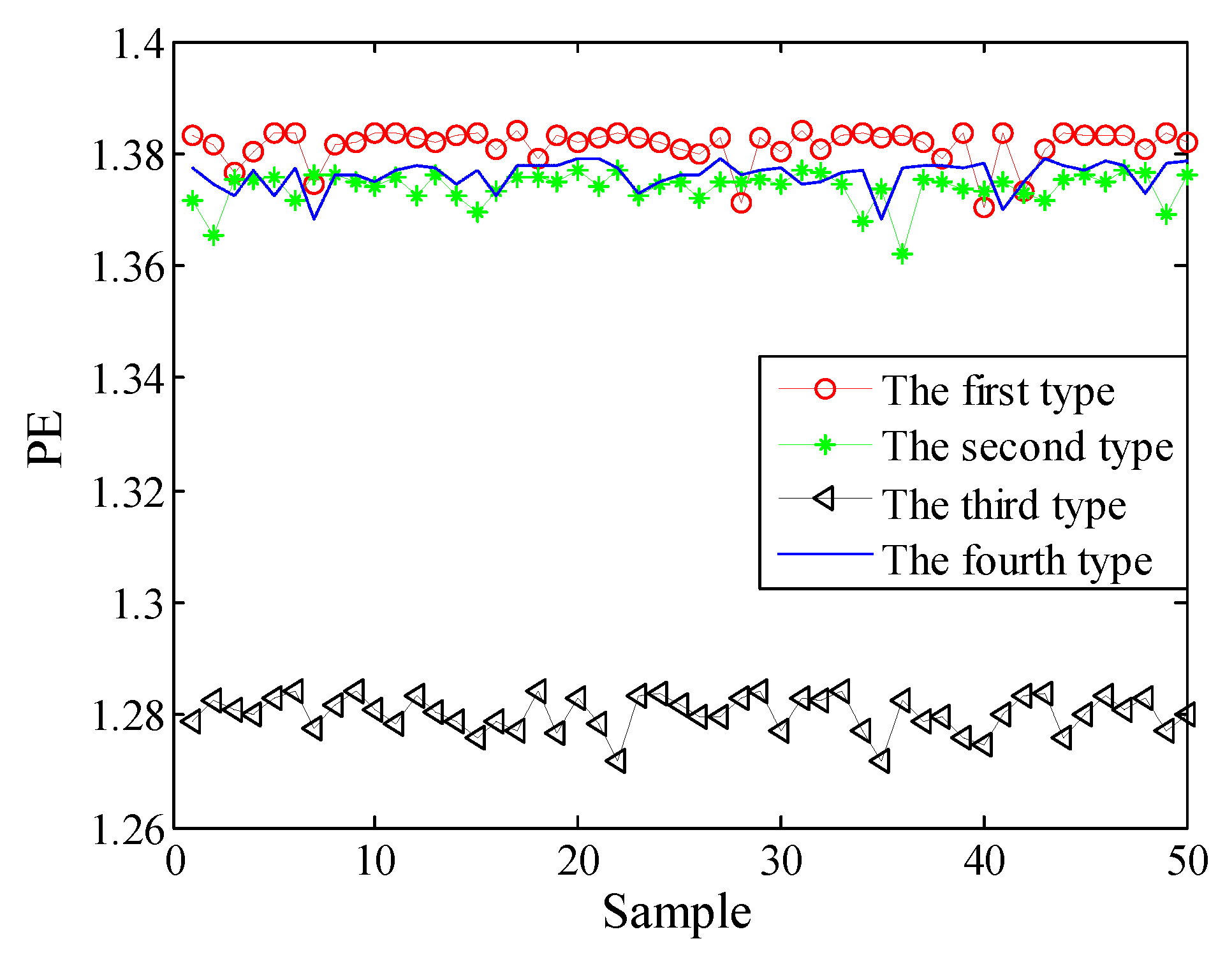
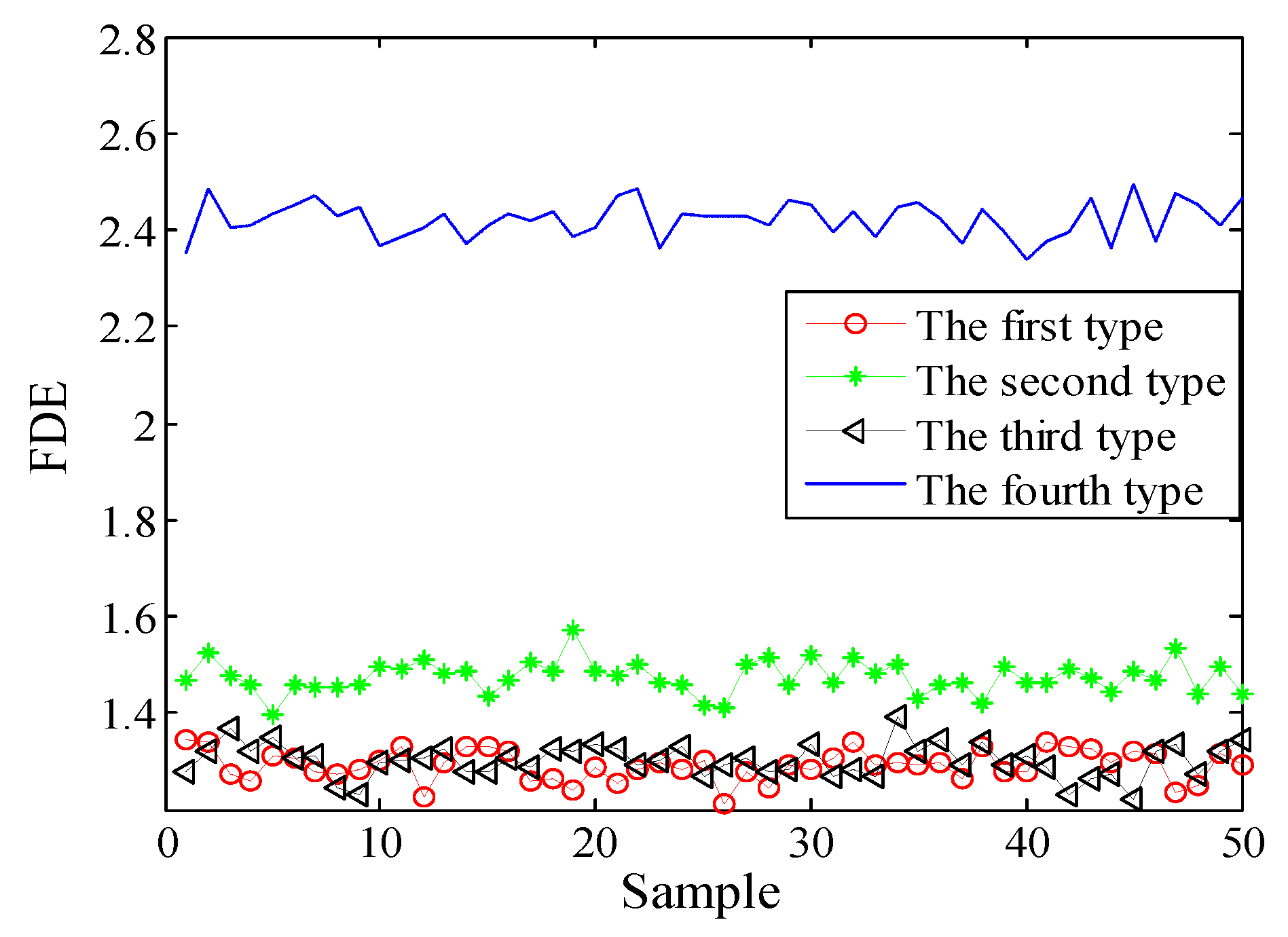
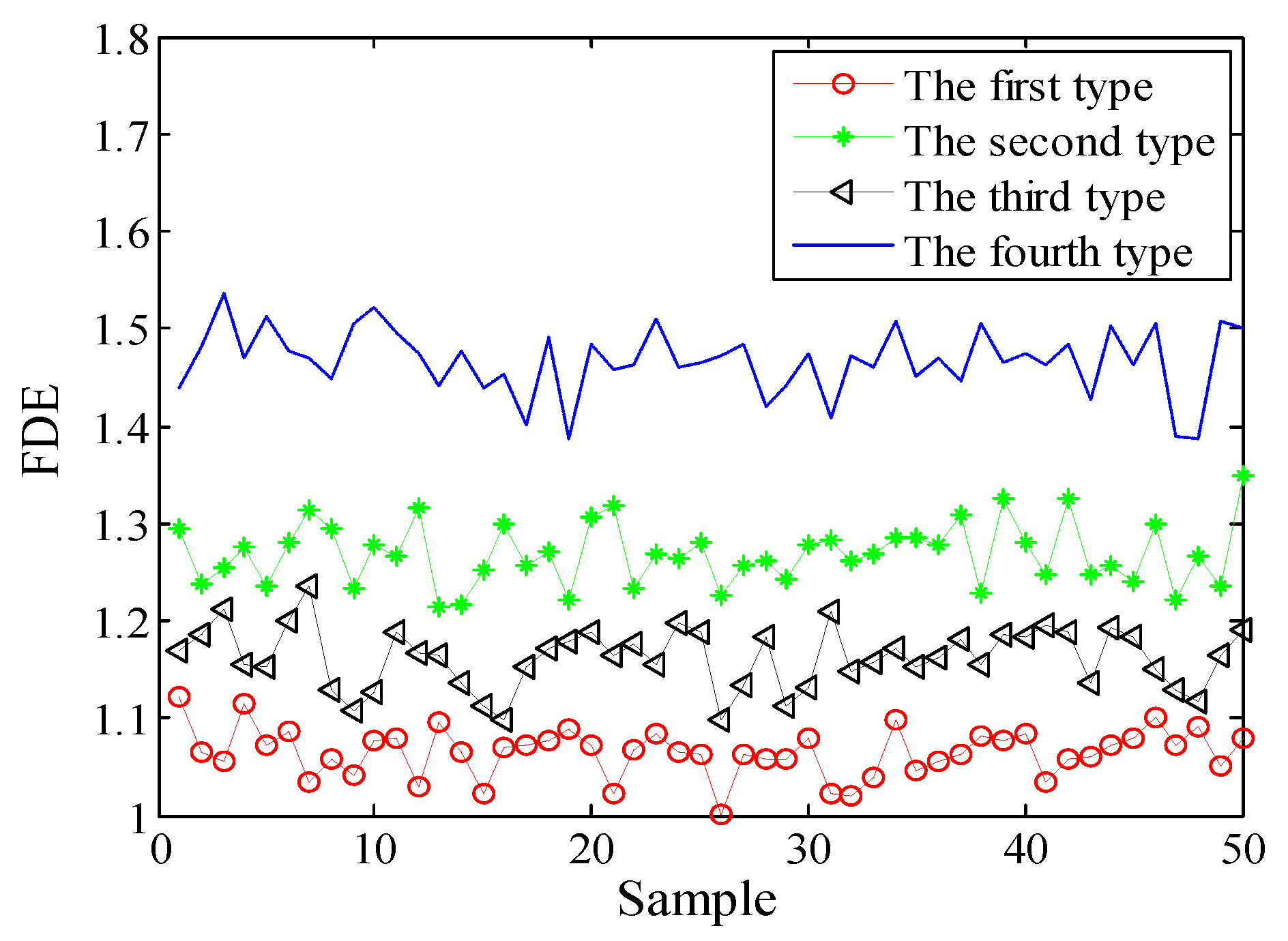
In order to test the advantages of FDE, the PE, MPE, and FDE of simulation signal
were calculated. The data lengths are 1000/2000/3000, respectively; the results are shown in
Table 1. The PE, MPE, and FDE of simulation signal
were calculated—the data length is 1000, the frequency
is 10/50/80, respectively; the results are shown in
Table 2. The sampling frequency is set as 1000 Hz. In
Table 1, the signal frequency is unchanged, and the corresponding entropy changes with the change of the signal length; the change of FDE value is the smallest. In
Table 1, the signal length remains unchanged, and the PE MPE and FDE values change with the change of signal frequency. In
Table 2, the signal length remains unchanged, and the PE MPE and FDE values change with the change of signal frequency. As seen in
Table 1 and
Table 2, the change of FDE value is the smallest and stability of FDE is the best. In summary, FDE is more stable and more suitable for feature extraction.
2.3. Test with the Analog Signals Using VMD and FDE
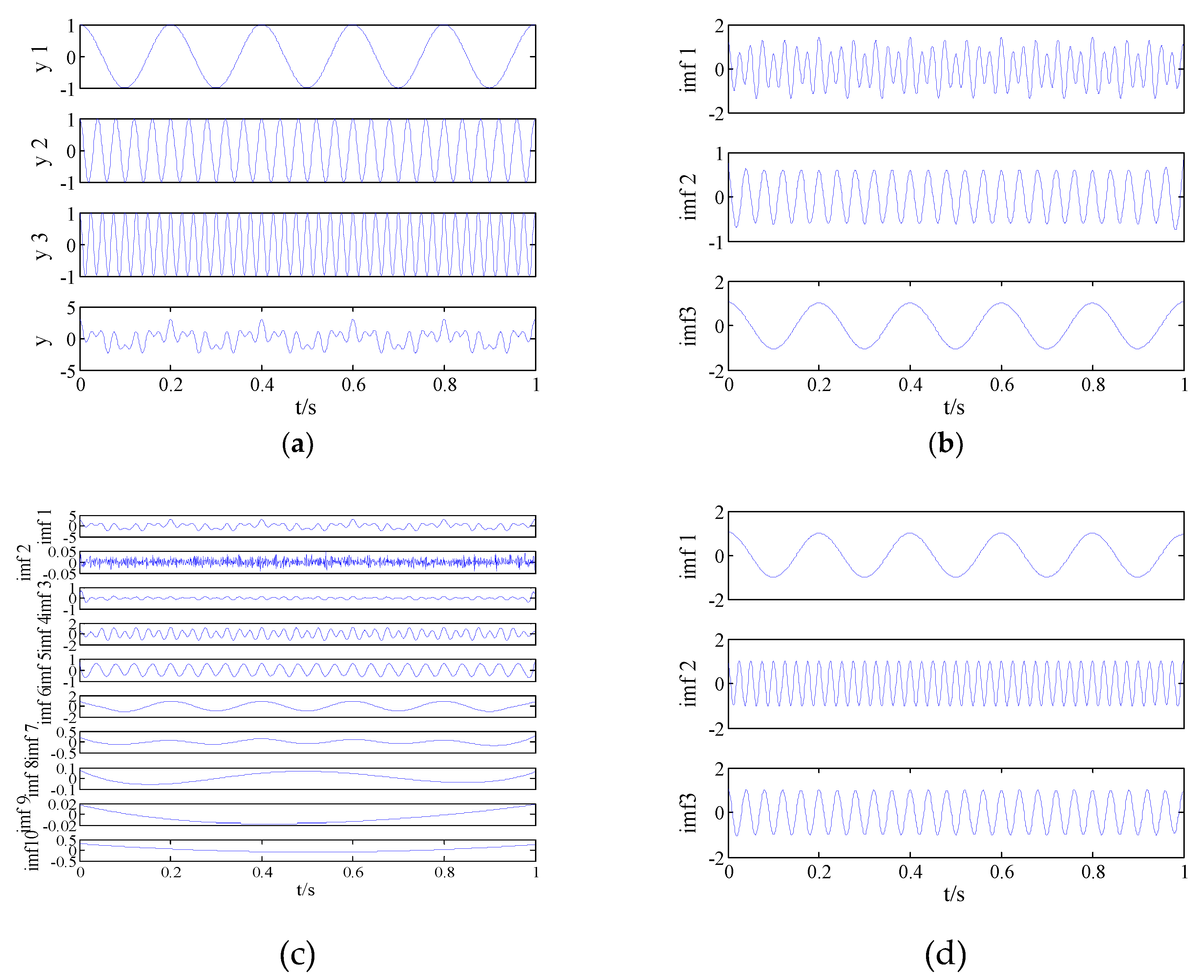
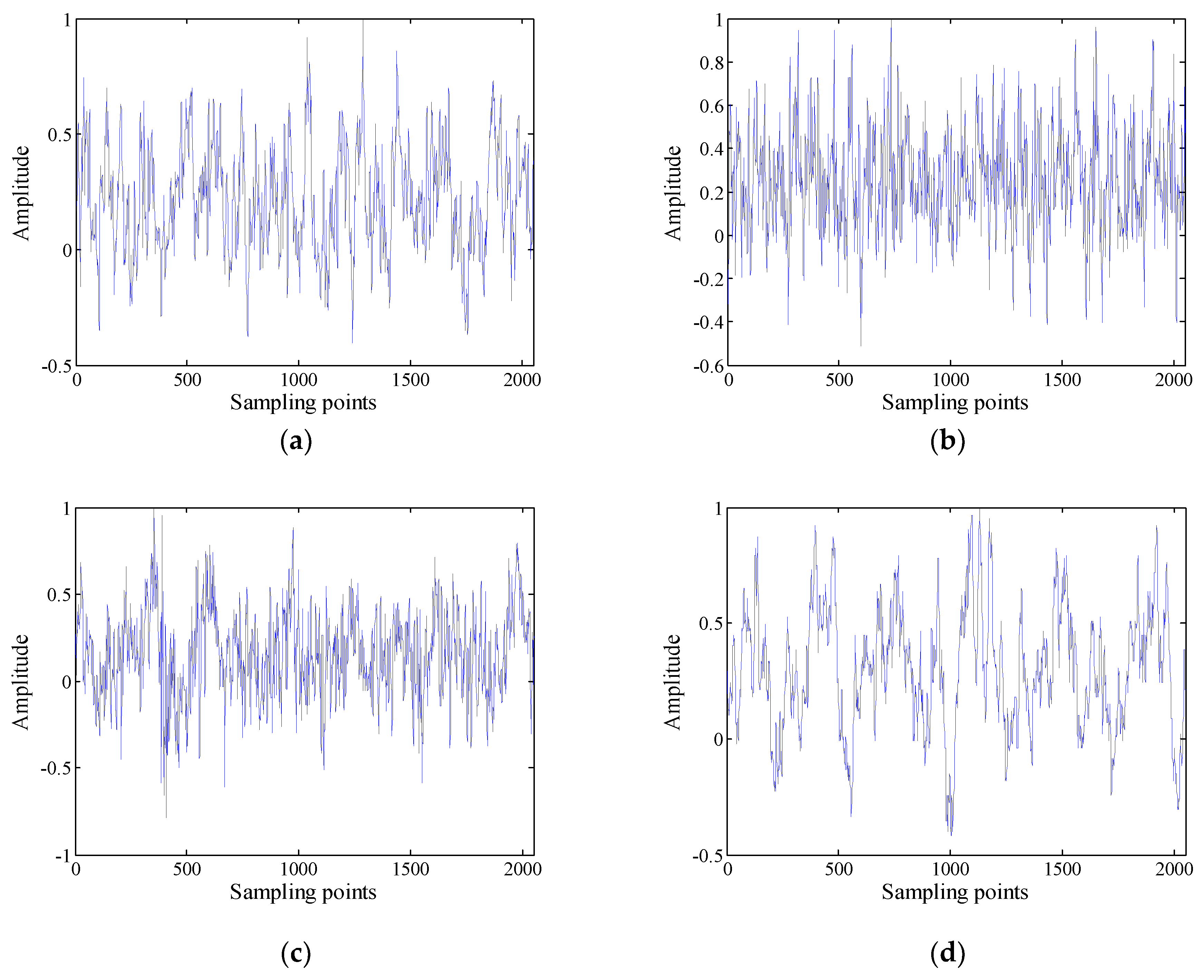
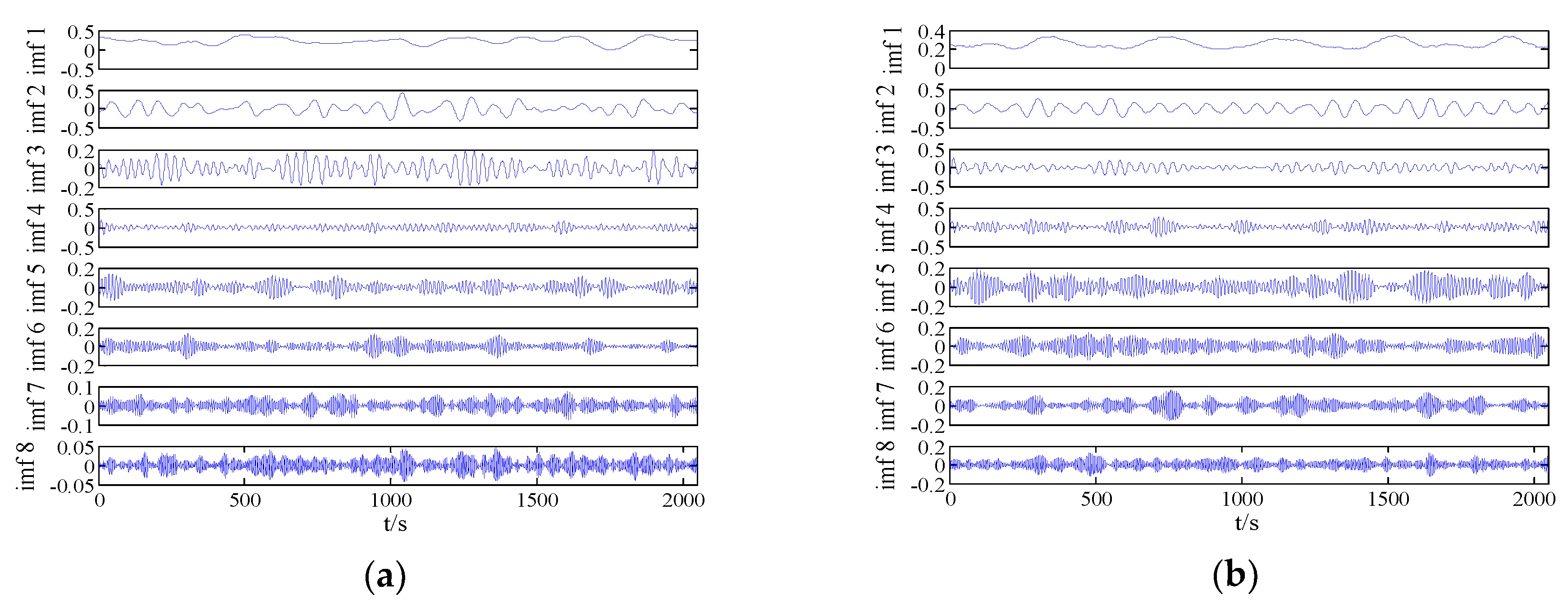
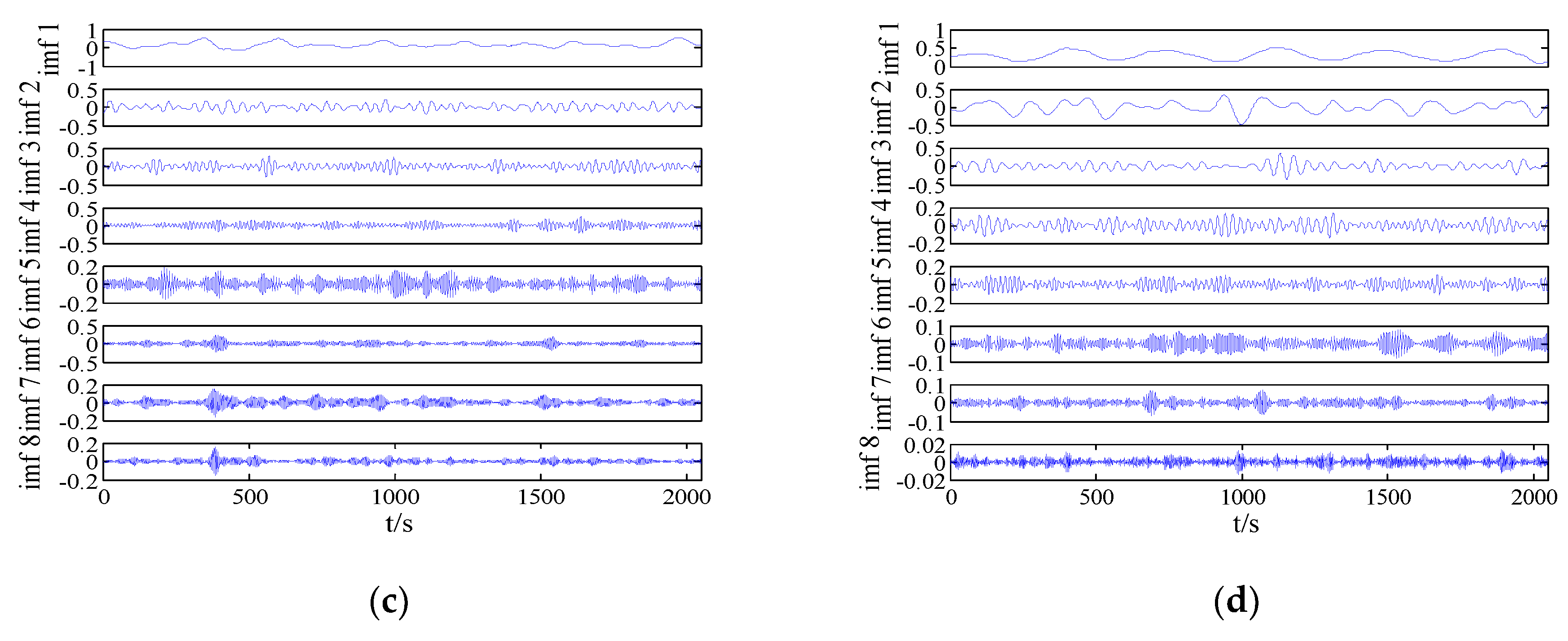
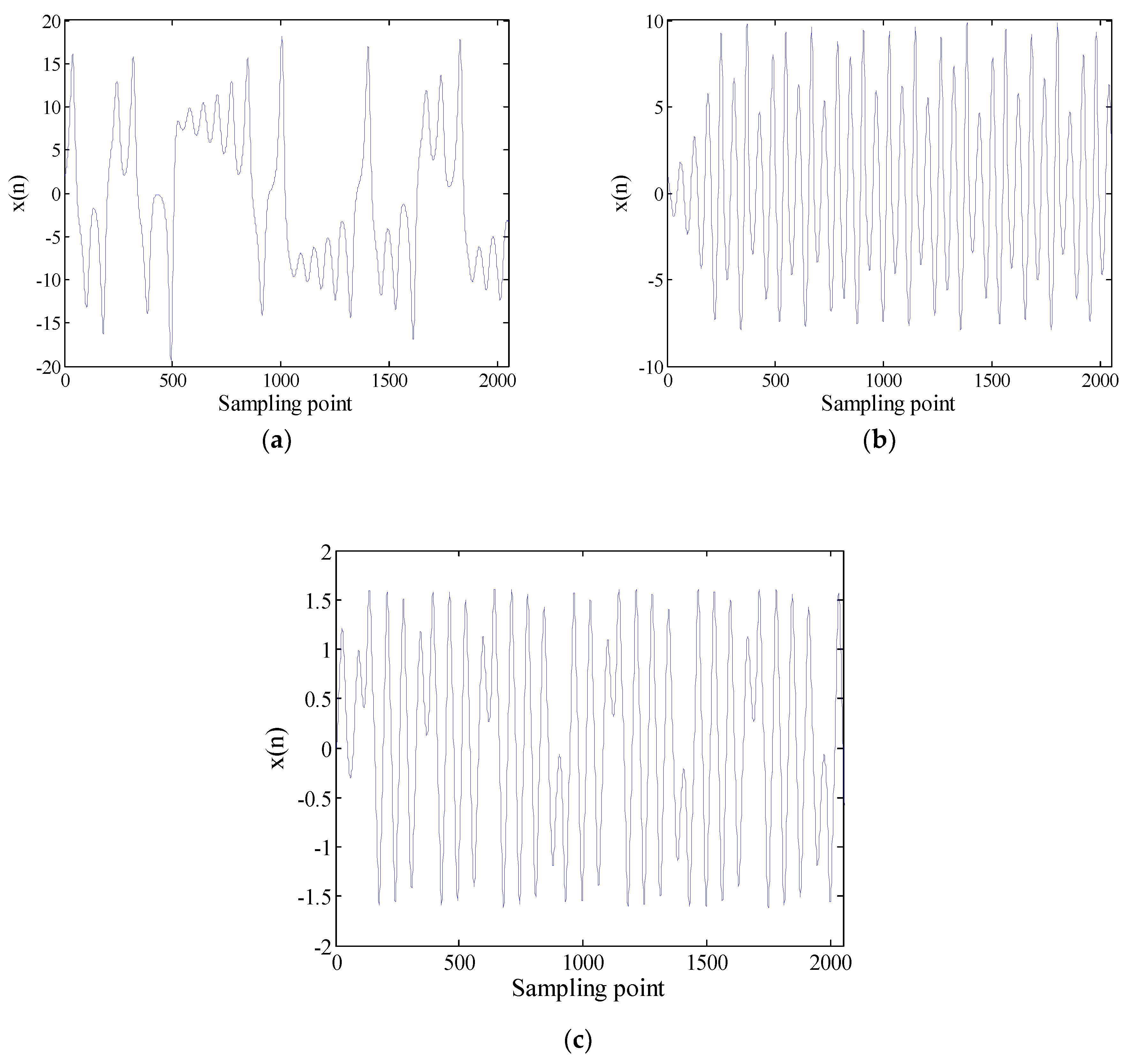
To further illustrate the advantages of VMD algorithm, the analog signal is decomposed by EMD, EEMD, and VMD in this section. The analog signal is as follows:
where
,
,
are the three components of
, and the sampling frequency of the analog signal is 1 kHz. The original signal is shown in
Figure 1a. The EMD decomposition result is shown in
Figure 1b. The white noise added during EEMD decomposition is 0.2, and the number of iterations is 200; the decomposition result is shown in
Figure 1c. The optimal number of VMD decompositions is 3, the step size is 0.03, the tolerance is
, the penalty parameter is 2000, and the decomposition result is shown in
Figure 1d. As seen in
Figure 1b, there is a serious mode mixing phenomenon in the IMF1. In
Figure 1c, the mode mixing is improved, but the added white noise has a great influence on the original signal. In
Figure 1d, there is no mode mixing and there is no noise effect. In order to further compare the three modal decompositions, the error between the components of the analog signal and the corresponding IMF is calculated.
Table 3 shows that
,
, and
correspond to IMF1, IMF2, and IMF3 after the VMD decomposition. At this time, error is the smallest and decomposition effect is the best.
In order to highlight the differences between PE, MPE, and FDE, the analog signal formula (12) is analyzed to calculate the components of the analog signal and the corresponding IMF’s PE, MPE, and FDE; the results are show in
Table 4. As observed, the difference between the FDE and analog signal components under VMD decomposition is the smallest, which can better reflect the characteristics of the original signal.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}