Feature Extraction of Ship-Radiated Noise Based on Regenerated Phase-Shifted Sinusoid-Assisted EMD, Mutual Information, and Differential Symbolic Entropy


Abstract
1. Introduction
2. Basic Theory
2.1. Regenerated Phase-Shifted Sinusoid-Assisted EMD
2.1.1. The Traditional EMD Algorithm
- Step 1.
- Connect the local maxima/minima of the original signal x(t) to obtain the upper/lower envelope using the cubic spline.
- Step 2.
- Derive the local mean of envelope, m(t), by averaging the upper and lower envelopes.
- Step 3.
- Extract the temporary local oscillation .
- Step 4.
- If satisfies some predefined stoppage criteria, is assigned as an IMF denoted as cm(t) where m is the IMF index. Otherwise, set , and repeat Steps 1–3.
- Step 5.
- Compute the residue rm(t) = x(t) − cm(t).
- Step 6.
- Set x(t) = rm(t), and repeat Steps 1–5 to extract the next IMF. The final residue is denoted as .
2.1.2. The Main Idea of RPSEMD
- Step 1.
- Initialize .
- Step 2.
- Apply EMD to and then determine and with the resulting IMFs. is acquired by uniformly sampling in with the phase shifting number . After this, is obtained.
- Step 3.
- The EMD of is performed, which aims to obtain the first IMF. The final IMF is calculated by averaging all these first IMFs.
- Step 4.
- Remove from . Let .
- Step 5.
- Repeat Steps 2–4 until no more IMF can be obtained. Consequently, the final is regarded as a residue .
2.1.3. Selecting the Parameters of
- Step 1.
- For the extreme of , get their instantaneous amplitudes and instantaneous frequencies , where e indicates the index of an extreme.
- Step 2.
- Repeatedly classify into P clusters by adjusting until any two clusters satisfy Equation (3).
- Step 3.
- Find the th cluster and set and .
- Step 4.
- Adjust to ensure can be separated from the IMFs clustered in and .
2.2. Differential Symbolic Entropy
2.2.1. Traditional Symbolization
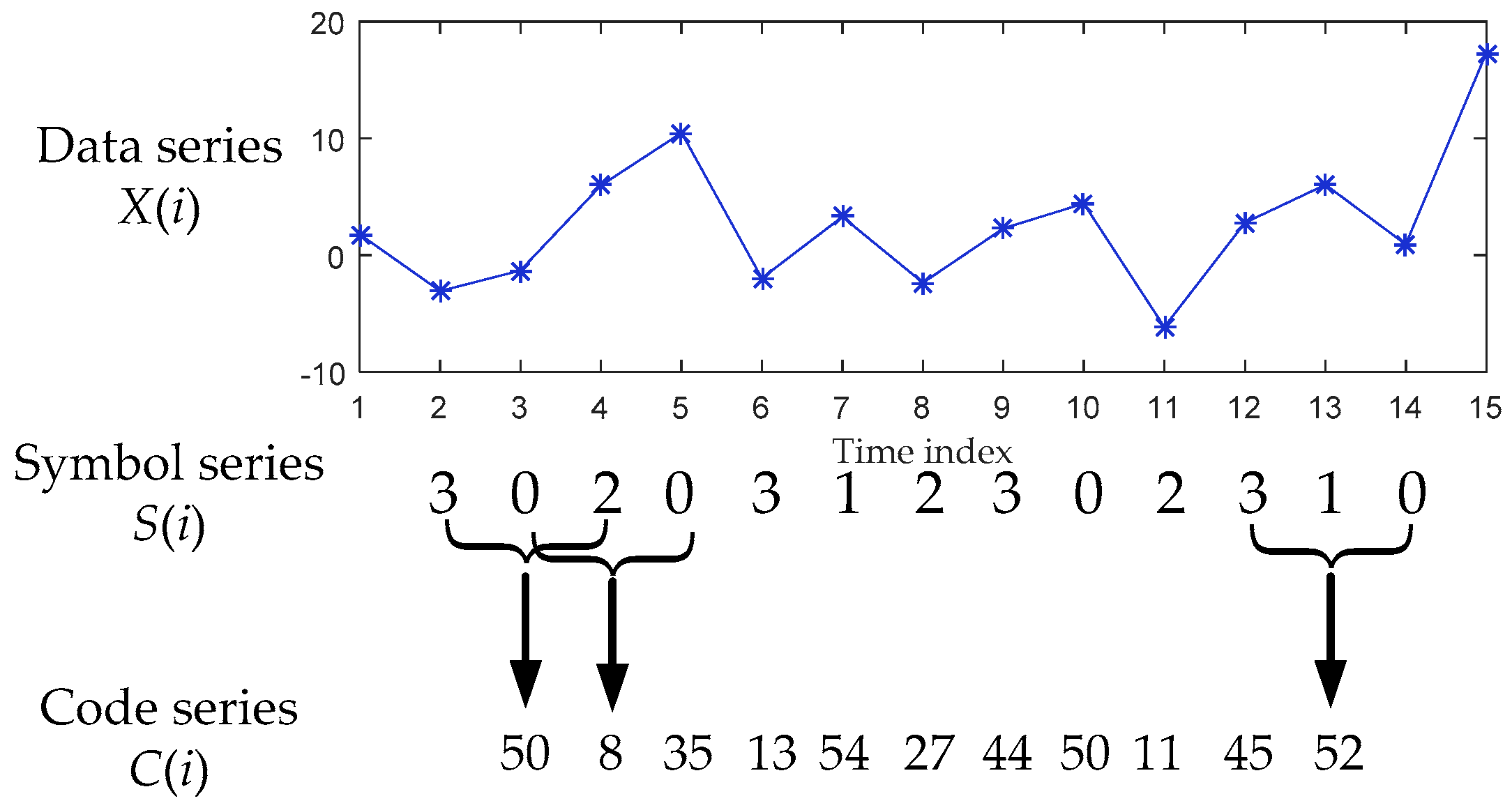
2.2.2. Differential Symbolization
2.3. Mutual Information
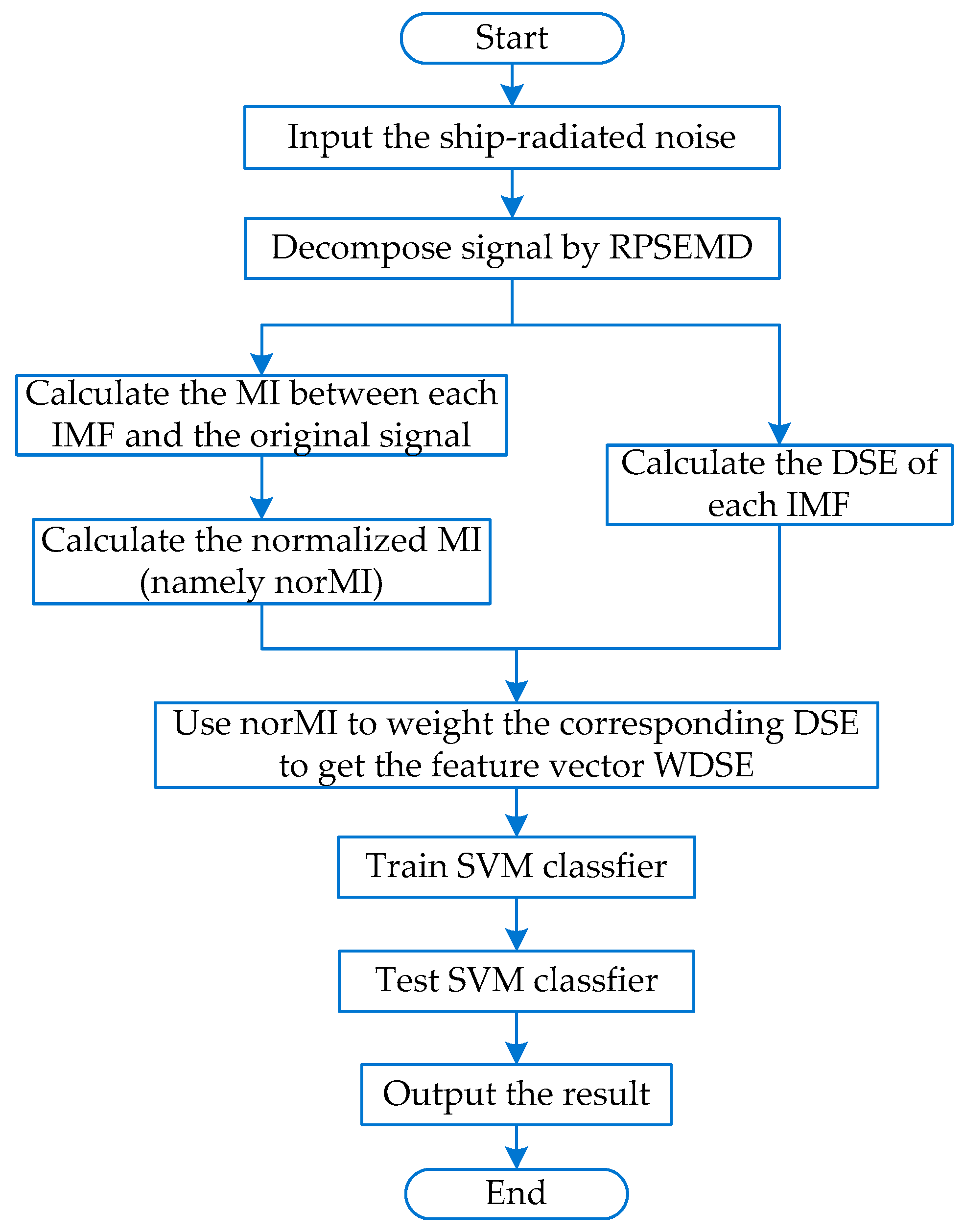
3. The Proposed Feature Extraction Method
- Step 1.
- The three types of recorded ship-radiated noise are normalized.
- Step 2.
- The ship-radiated noise is decomposed into a series of IMFs by RPSEMD.
- Step 3.
- Calculate the DSE of each IMF.
- Step 4.
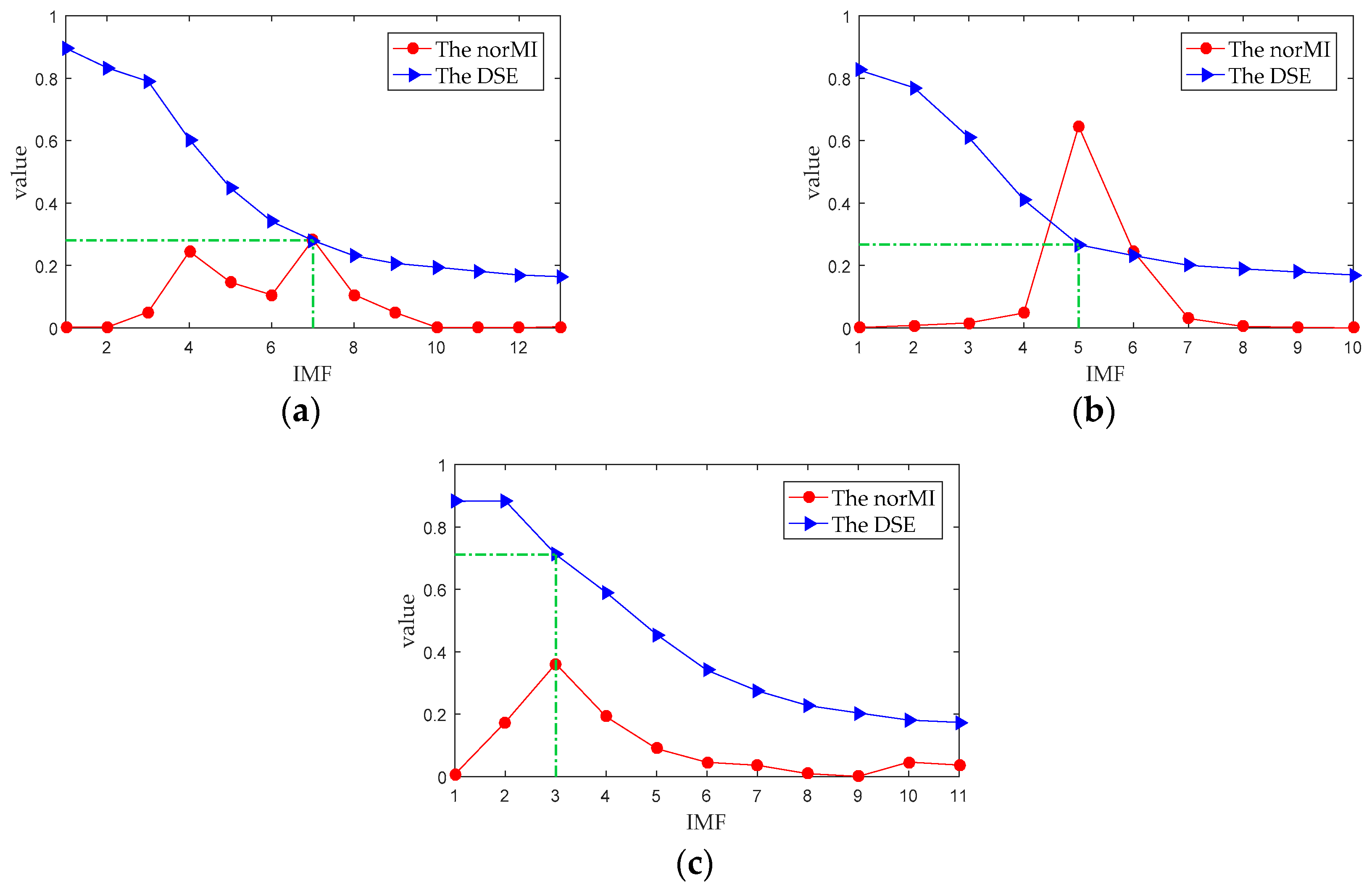
- The MIs between each IMF and the original signal are calculated, and then, the sum of all MIs is used as the denominator to calculate the normalized value of each MI, expressed as norMI.
- Step 5.
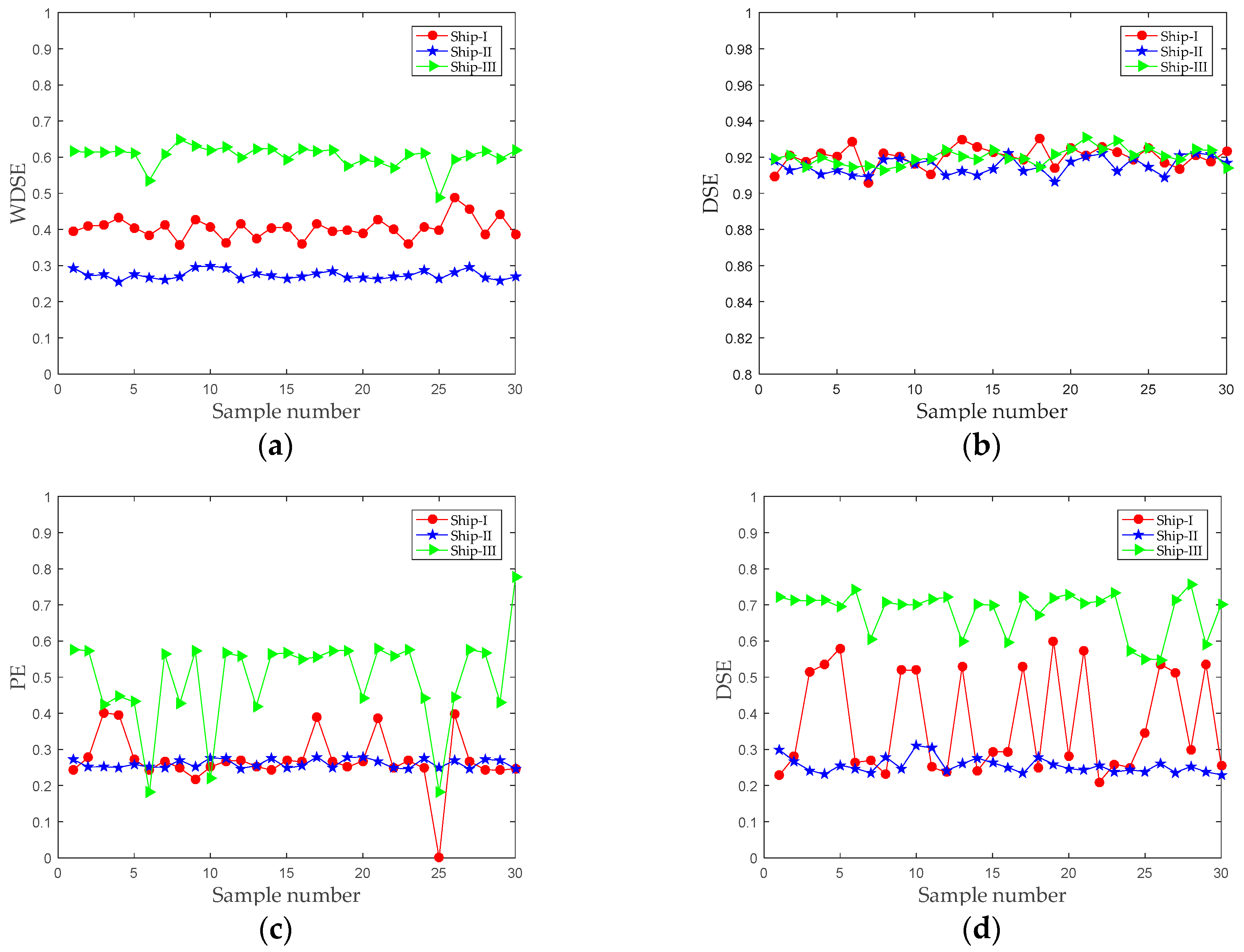
- The norMI is used as the weight coefficient to weight the corresponding DSE, and the feature vector WDSE is obtained.
- Step 6.
- The feature vector WDSE is input into the support vector machine for classification.
4. Analysis of the Simulation Signal
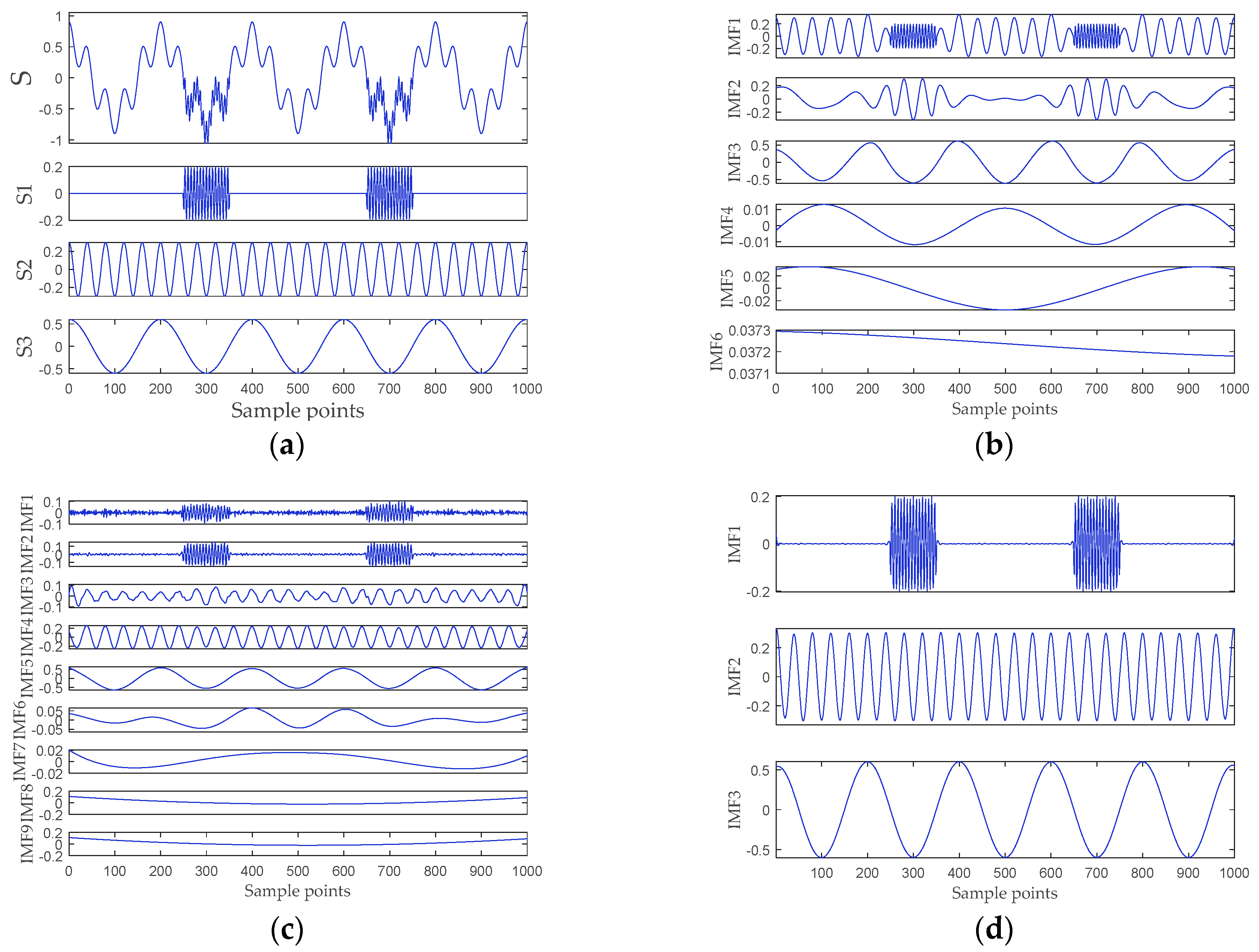
4.1. Performance Analysis of EMD, EEMD, and RPSEMD
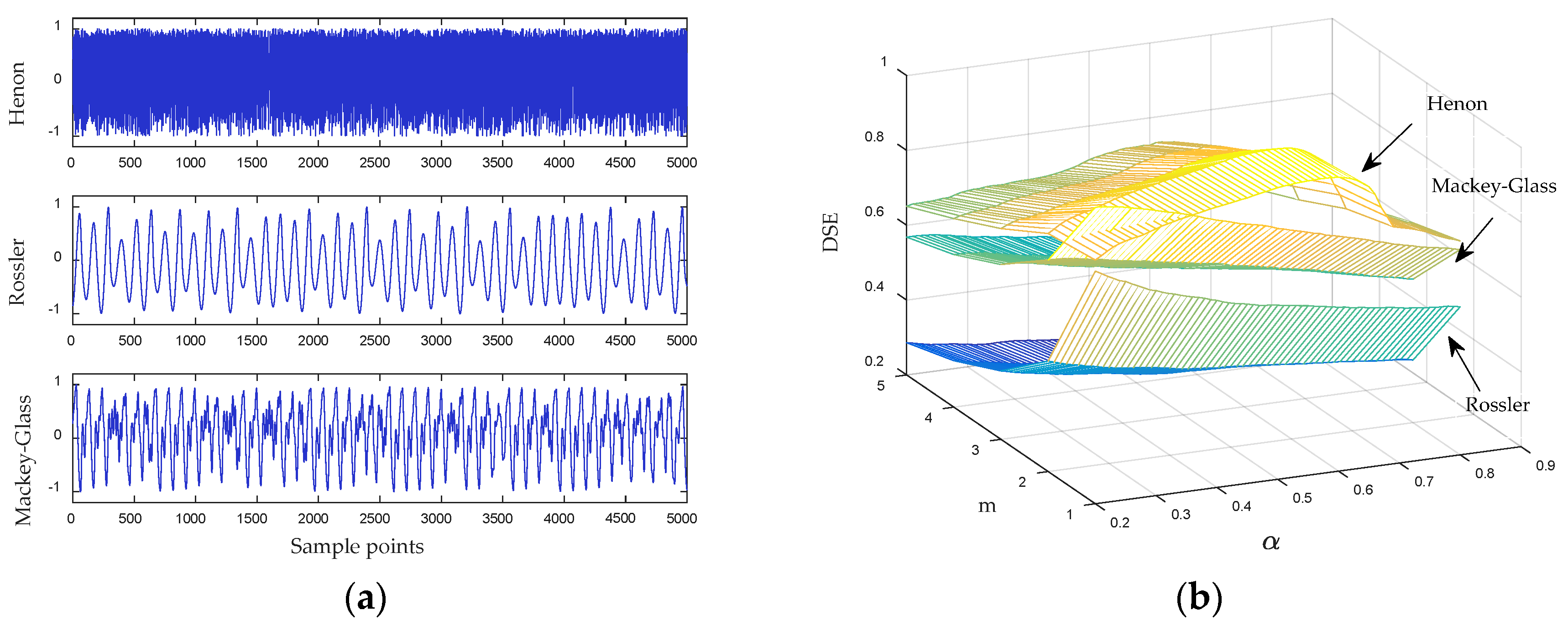
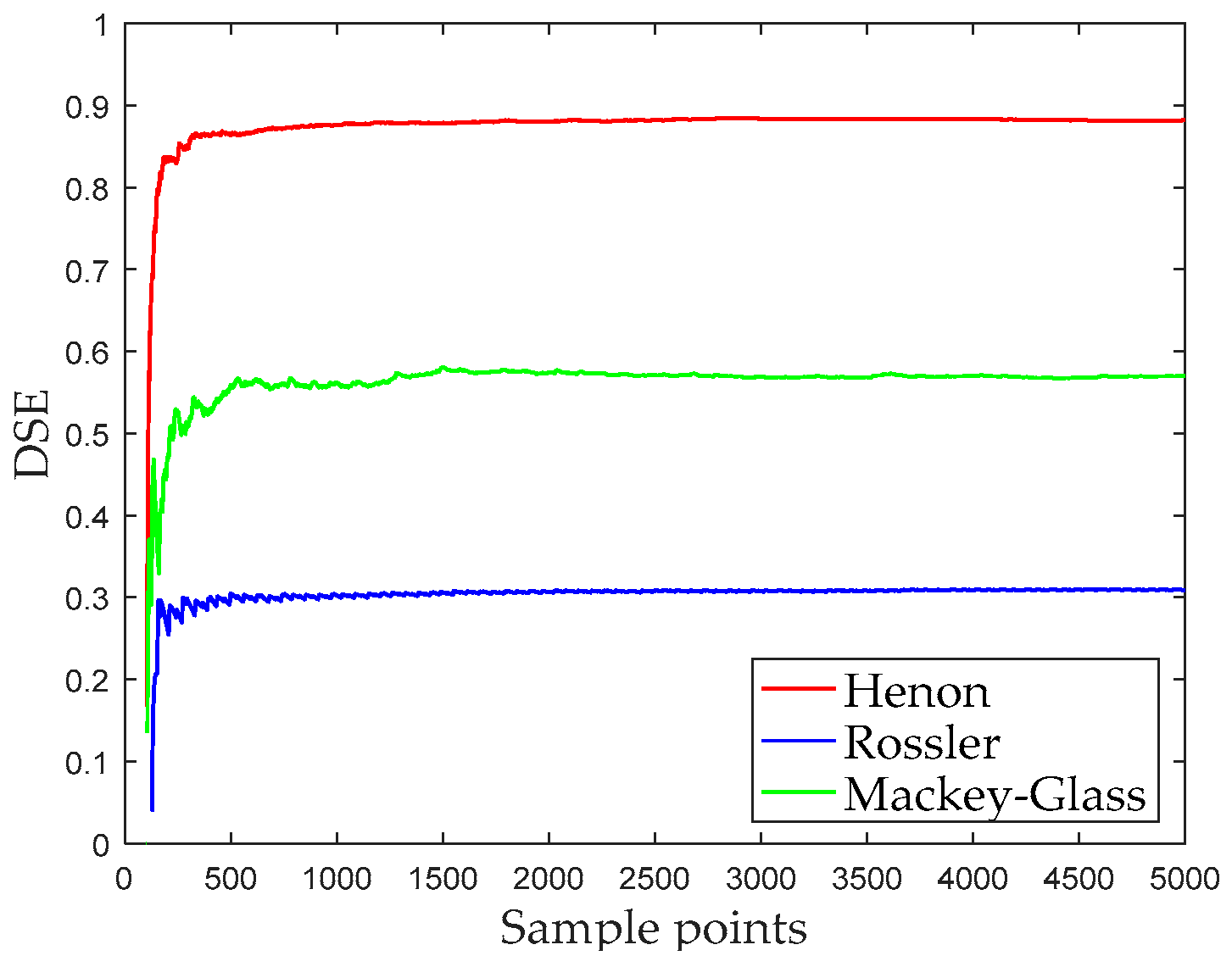
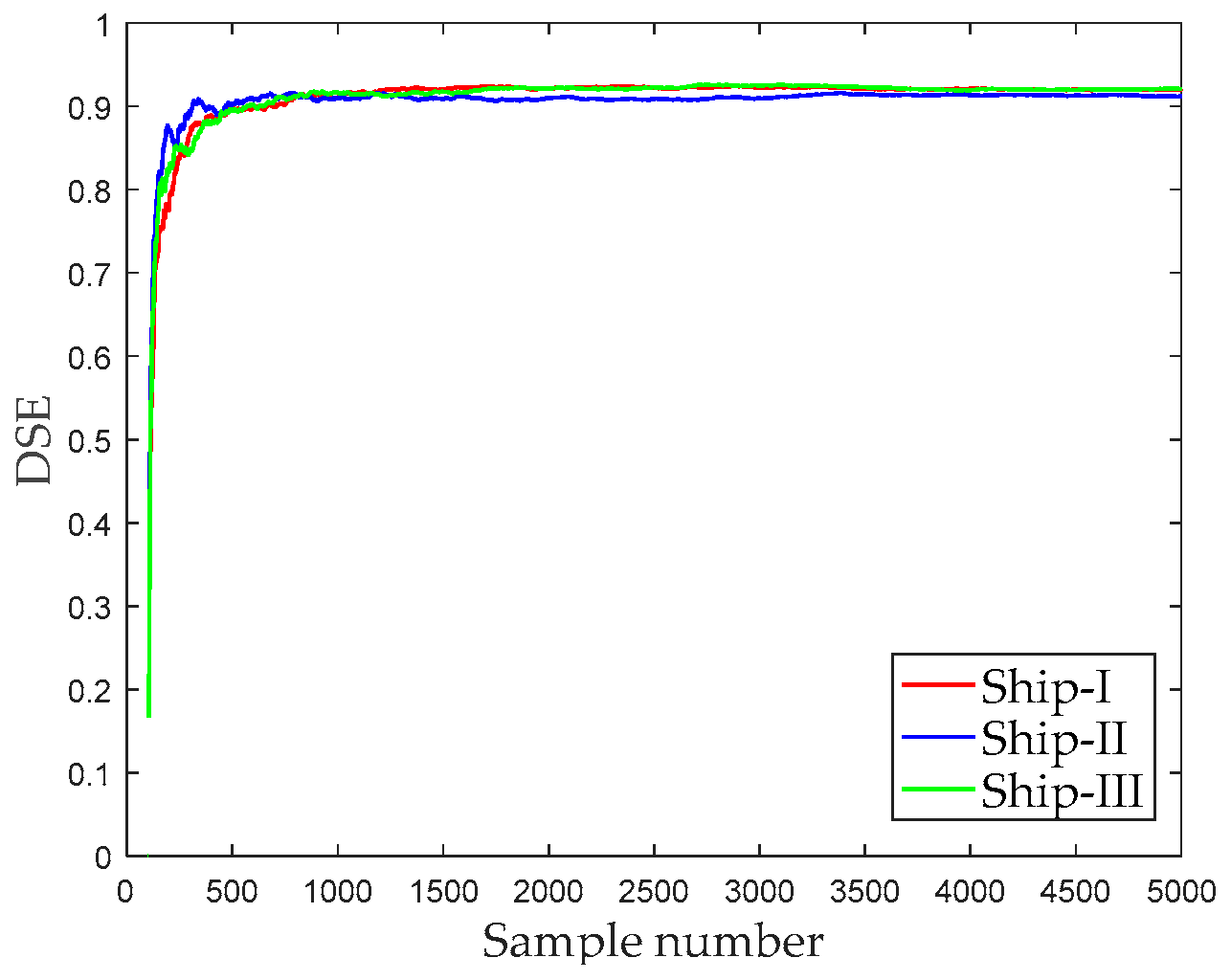
4.2. Parameter Selection of DSE
- (1)
- Henon mapping: , and the initial condition is . In this paper, we analyze the data points in the y-direction.
- (2)
- Rossler system: , the initial condition is , and the integral step size is 0.05. In this paper, we analyze the data points in the x-direction.
- (3)
- Mackey–Glass signal: , where .
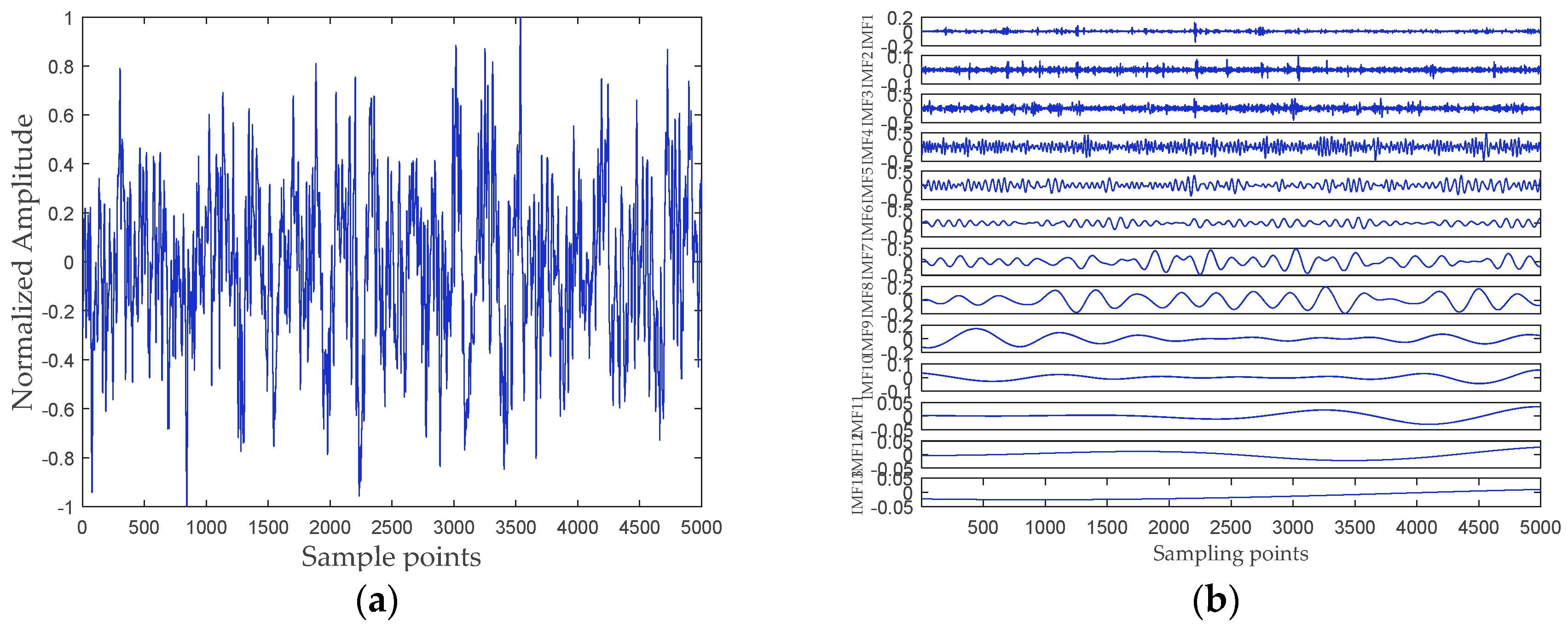
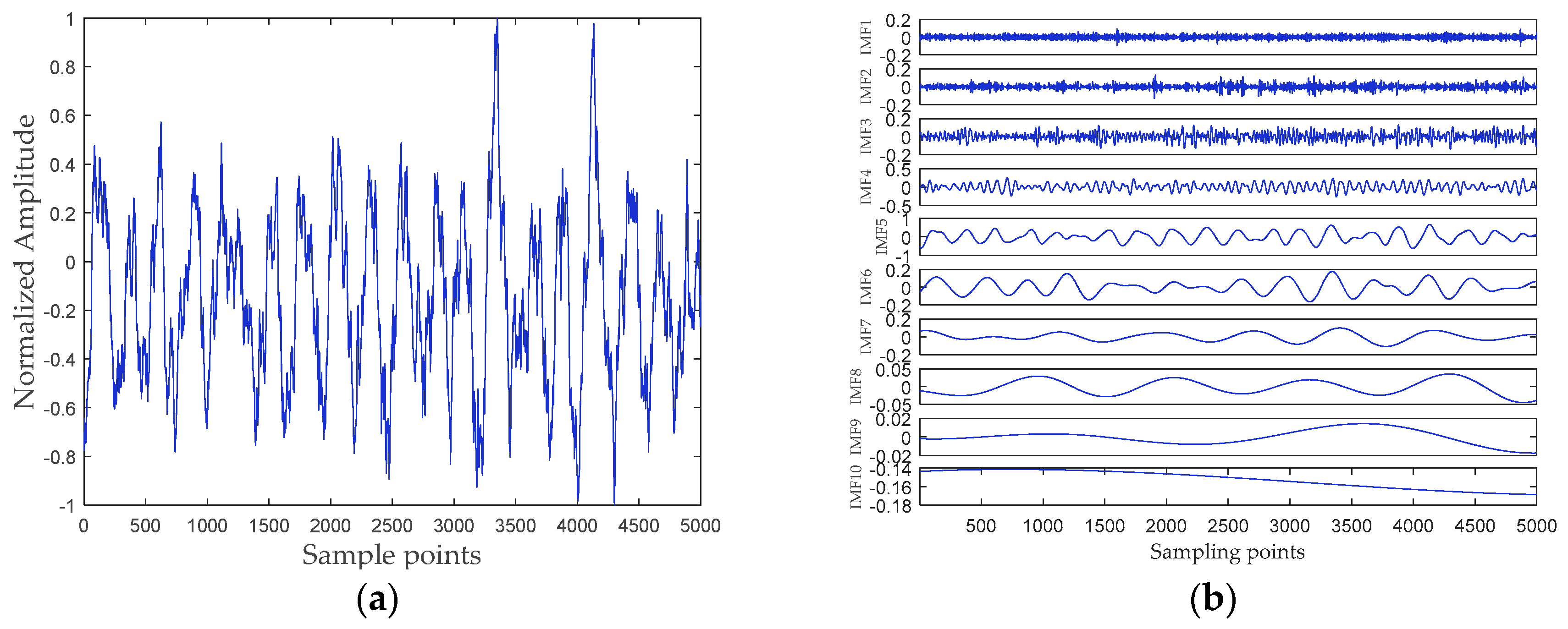
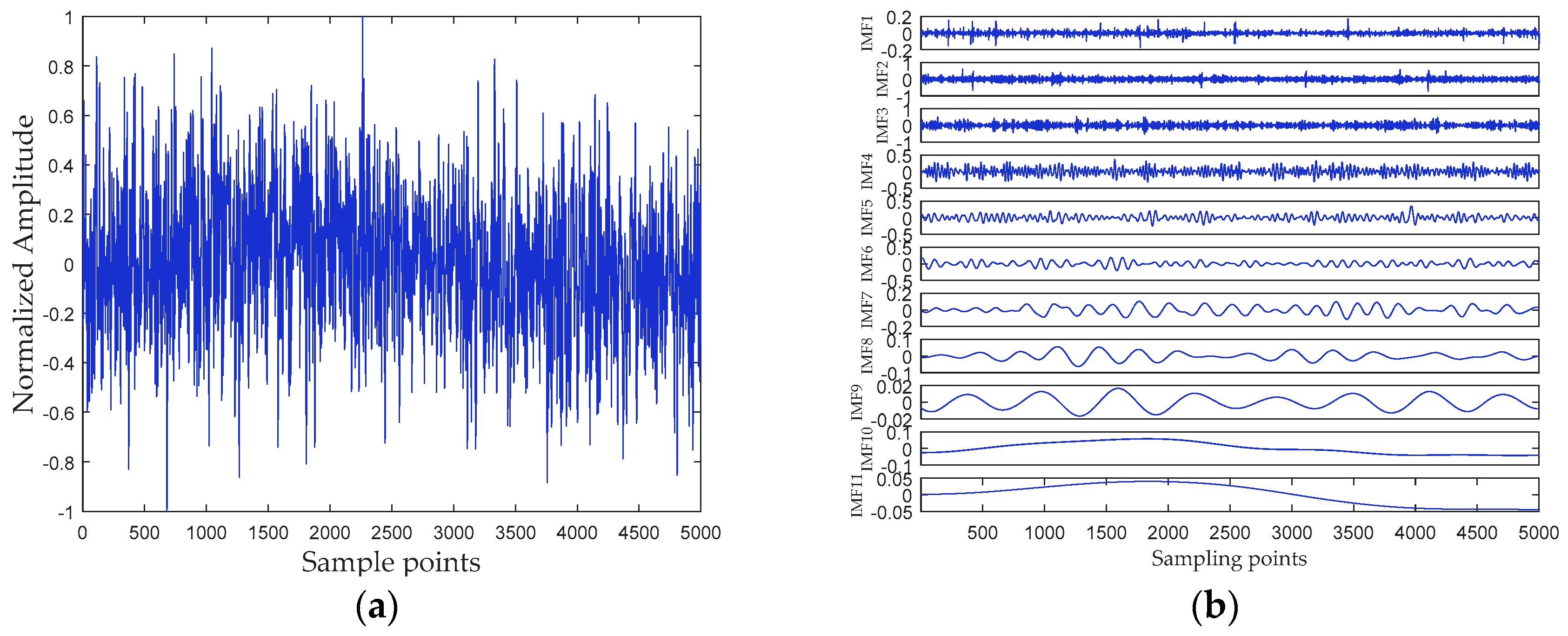
5. Analysis of Ship-Radiated Noise Based on RPSEMD, MI, and DSE
6. Feature Extraction and Classification of Ship-Radiated Noise
6.1. Feature Extraction
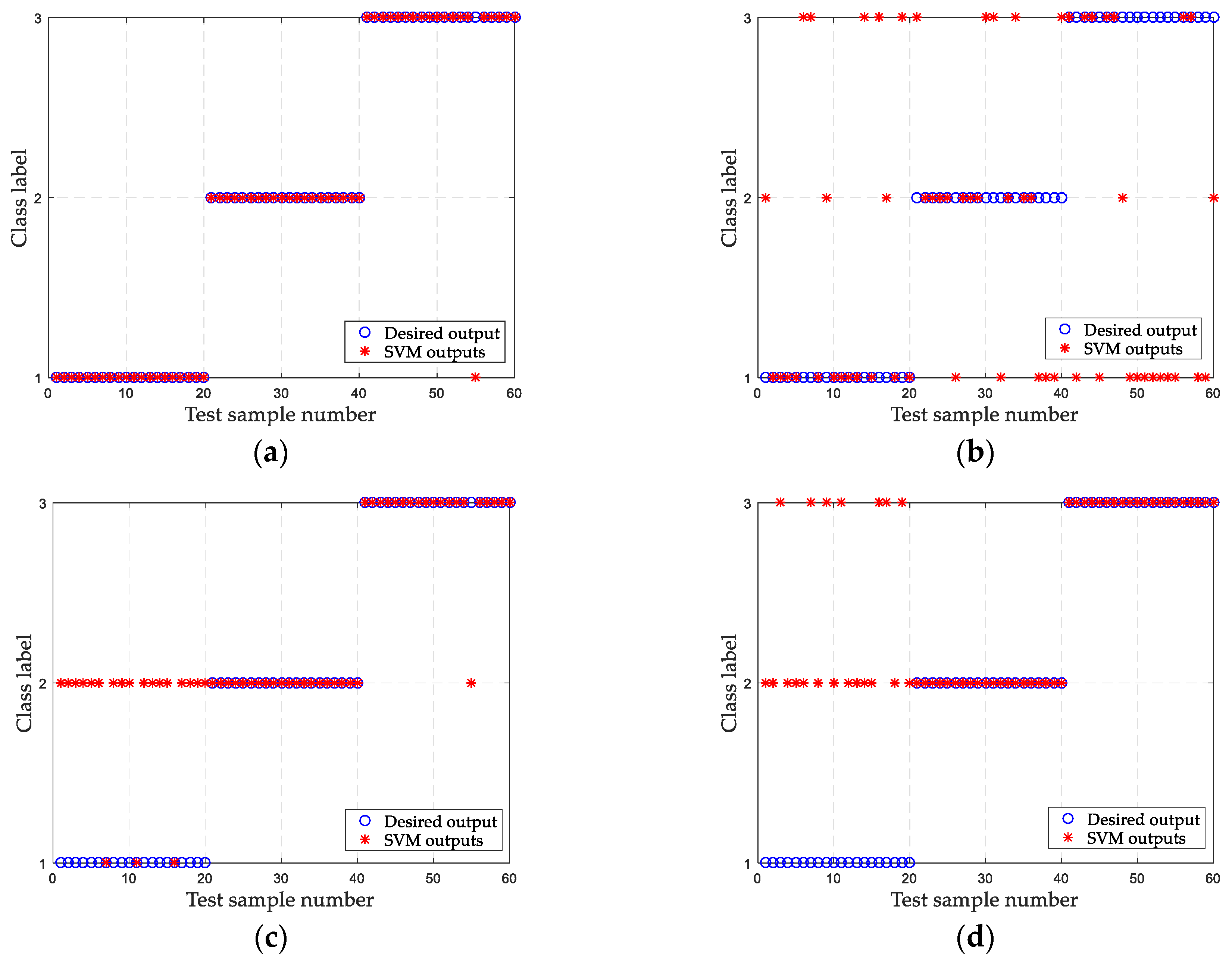
6.2. Classification
7. Conclusions
- (1)
- A novel differential symbolic entropy for measuring the complexity of time series is introduced. DSE not only has the advantage of high computational efficiency, but also has a significant effect on shorter time series. It was first applied to underwater acoustic signal processing.
- (2)
- Simulation experiments demonstrate that RPSEMD can better alleviate the mode mixing problem compared with EMD and EEMD. Therefore, this paper uses RPSEMD as a signal decomposition tool.
- (3)
- Compared with [21], it is often the case that only one IMF with the principal features is selected for feature extraction. In this paper, the entropy is weighted by norMI, so the importance of each IMF is considered.
- (4)
- The method proposed in this paper can extract the characteristics of ship-radiated noise more precisely and comprehensively, and the classification accuracy reaches 98.3333%.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Siddagangaiah, S.; Li, Y.; Guo, X.; Yang, K. On the dynamics of ocean ambient noise: Two decades later. Chaos 2015, 25, 103117. [Google Scholar] [CrossRef]
- Zheng, S.; Guo, H.; Li, Y.; Wang, B.; Zhang, P. A new method for detecting line spectrum of ship-radiated noise using duffing oscillator. Chin. Sci. Bull. 2007, 52, 1906–1912. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. Research on ship-radiated noise denoising using secondary variational mode decomposition and correlation coefficient. Sensors 2018, 18, 48. [Google Scholar] [CrossRef]
- Wales, S.C.; Heitmeyer, R.M. An ensemble source spectra model for merchant ship-radiated noise. J. Acoust. Soc. Am. 2002, 111, 1211–1231. [Google Scholar] [CrossRef]
- Li, G.; Yang, Z.; Yang, H. Noise reduction method of underwater acoustic signals based on uniform phase empirical mode decomposition, amplitude-aware permutation entropy, and Pearson correlation coefficient. Entropy 2018, 20, 918. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y.; Liang, H.; Yu, J. Hierarchical cosine similarity entropy for feature extraction of ship-radiated noise. Entropy 2018, 20, 425. [Google Scholar] [CrossRef]
- Wang, S.; Zeng, X. Robust underwater noise targets classification using auditory inspired time-frequency analysis. Appl. Acoust. 2014, 78, 68–76. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. A novel feature extraction method for ship-radiated noise based on variational mode decomposition and multi-scale permutation entropy. Entropy 2017, 19, 342. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.A.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, C.; Qian, K.; Da, F. Regenerated phase-shifted sinusoid-assisted empirical mode decomposition. IEEE Signal Process. Lett. 2016, 23, 556–560. [Google Scholar] [CrossRef]
- Yi, C.; Lv, Y.; Xiao, H.; You, G.; Dang, Z. Research on the blind source separation method based on regenerated phase-shifted sinusoid-assisted EMD and its application in diagnosing rolling-bearing faults. Appl. Sci. 2017, 7, 414. [Google Scholar] [CrossRef]
- Lake, D.E.; Richman, J.S.; Griffin, M.P.; Moorman, J.R. Sample entropy analysis of neonatal heart rate variability. Am. J. Physiol. Regul. Integr. Comp. Physiol. 2002, 283, 789. [Google Scholar] [CrossRef] [PubMed]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Aziz, W.; Arif, M. Complexity analysis of stride interval time series by threshold dependent symbolic entropy. Eur. J. Appl. Physiol. 2006, 98, 30–40. [Google Scholar] [CrossRef] [PubMed]
- Azami, H.; Escudero, J. Amplitude-aware permutation entropy: Illustration in spike detection and signal segmentation. Comput. Meth. Progr. Biomed. 2016, 128, 40–51. [Google Scholar] [CrossRef] [PubMed]
- Yao, W.; Wang, J. Double symbolic joint entropy in nonlinear dynamic complexity analysis. AIP Adv. 2017, 7, 075313. [Google Scholar] [CrossRef]
- Yao, W.; Wang, J. Differential symbolic entropy in nonlinear dynamics complexity analysis. physics.data-an (under review). arXiv, 2019; arXiv:1801.08416v2. [Google Scholar]
- Yang, L. A empirical mode decomposition approach to feature extraction of ship-radiated noise. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 3682–3686. [Google Scholar] [CrossRef]
- Bao, F.; Wang, X.; Tao, Z.; Wang, Q.; Du, S. EMD-based extraction of modulated cavitation noise. Mech. Syst. Signal Process. 2010, 24, 2124–2136. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, Z.; Chen, X. Feature extraction of ship-radiated noise based on permutation entropy of the intrinsic mode function with the highest energy. Entropy 2016, 18, 393. [Google Scholar] [CrossRef]
- Zhou, S.; Qian, S.; Chang, W.; Xiao, Y.; Cheng, Y. A novel bearing multi-fault diagnosis approach based on weighted permutation entropy and an improved SVM ensemble classifier. Sensors 2018, 18, 1934. [Google Scholar] [CrossRef] [PubMed]
- Bao, F.; Li, C.; Wang, X.; Wang, Q.; Du, S. Ship classification using nonlinear features of radiated sound: An approach based on empirical mode decomposition. J. Acoust. Soc. Am. 2010, 128, 206–214. [Google Scholar] [CrossRef] [PubMed]
- Gan, X.; Lu, H.; Yang, G.; Liu, J. Rolling bearing diagnosis based on composite multiscale weighted permutation entropy. Entropy 2018, 20, 821. [Google Scholar] [CrossRef]
- Knobles, D.P. Maximum entropy inference of seabed attenuation parameters using ship, radiated broadband noise. J. Acoust. Soc. Am. 2015, 138, 3563–3575. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Li, Y.; Li, G. Energy analysis of ship radiated noise based on ensemble empirical mode decomposition. J. Vib. Shock 2015, 34, 55–59. [Google Scholar] [CrossRef]
- Firat, U.; Akgul, T. Compressive sensing for detecting ships with second-order cyclostationary signatures. IEEE J. Ocean. Eng. 2018, 43, 1086–1098. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P. One or two frequencies? the empirical mode decomposition answers. IEEE Trans. Signal Process. 2008, 56, 85–95. [Google Scholar] [CrossRef]
- Kurths, J.; Voss, A.; Saparin, P.; Witt, A.; Kleiner, H.J.; Wessel, N. Quantitative analysis of heart rate variability. Chaos 1995, 5, 88–94. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J.; Yang, H.; Wang, L. A new underwater acoustic signal denoising technique based on CEEMDAN, mutual information, permutation entropy, and wavelet threshold denoising. Entropy 2018, 20, 563. [Google Scholar] [CrossRef]
- Peng, H.; Long, F.; Ding, C. Feature selection based on mutual information criteria of max-dependency, max-relevance, and min-redundancy. IEEE Trans. Pattern Anal. 2005, 27, 1226–1238. [Google Scholar] [CrossRef]
- Fan, C.; Fan, Qi.; Li, H. Base-scale entropy and energy analysis of flow characteristics of the two-phase flow. Syst. Sci. Control Eng. 2018, 6, 262–269. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3.9600 | 45.0000 | 180.0000 |
| Method | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 |
|---|---|---|---|---|---|---|---|---|---|
| EMD | 38.0397 | 15.9000 | 158.5438 | 0.0703 | 0.6678 | 1.3866 | / | / | / |
| EEMD | 0.5846 | 1.8154 | 1.8405 | 28.9382 | 163.4087 | 0.7825 | 0.1020 | 0.0258 | 1.7101 |
| RPSEMD | 3.9116 | 45.0832 | 177.7195 | / | / | / | / | / | / |
| Parameter | Ship-I | Ship-II | Ship-III |
|---|---|---|---|
| The index of the IMF with the largest norMI | 7 | 5 | 3 |
| The DSE of the IMF with the largest norMI | 0.2802 | 0.2664 | 0.7116 |
| Parameter | Ship-I | Ship-II | Ship-III |
|---|---|---|---|
| WDSE | 0.3939 | 0.2931 | 0.6154 |
| Methods | Accuracy Rate |
|---|---|
| The proposed method | 98.3333% |
| The DSE of original ship-radiated noise | 48.3333% |
| The EMD-PIMF-PE method [6] | 70% |
| The IMF-norMI-DSE method | 66.6667% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Yang, Z.; Yang, H. Feature Extraction of Ship-Radiated Noise Based on Regenerated Phase-Shifted Sinusoid-Assisted EMD, Mutual Information, and Differential Symbolic Entropy. Entropy 2019, 21, 176. https://doi.org/10.3390/e21020176
Li G, Yang Z, Yang H. Feature Extraction of Ship-Radiated Noise Based on Regenerated Phase-Shifted Sinusoid-Assisted EMD, Mutual Information, and Differential Symbolic Entropy. Entropy. 2019; 21(2):176. https://doi.org/10.3390/e21020176
Chicago/Turabian StyleLi, Guohui, Zhichao Yang, and Hong Yang. 2019. "Feature Extraction of Ship-Radiated Noise Based on Regenerated Phase-Shifted Sinusoid-Assisted EMD, Mutual Information, and Differential Symbolic Entropy" Entropy 21, no. 2: 176. https://doi.org/10.3390/e21020176
APA StyleLi, G., Yang, Z., & Yang, H. (2019). Feature Extraction of Ship-Radiated Noise Based on Regenerated Phase-Shifted Sinusoid-Assisted EMD, Mutual Information, and Differential Symbolic Entropy. Entropy, 21(2), 176. https://doi.org/10.3390/e21020176