Dynamics Analysis of a New Fractional-Order Hopfield Neural Network with Delay and Its Generalized Projective Synchronization


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Numerical Algorithm
2.1. Preliminaries
2.2. Numerical Algorithm
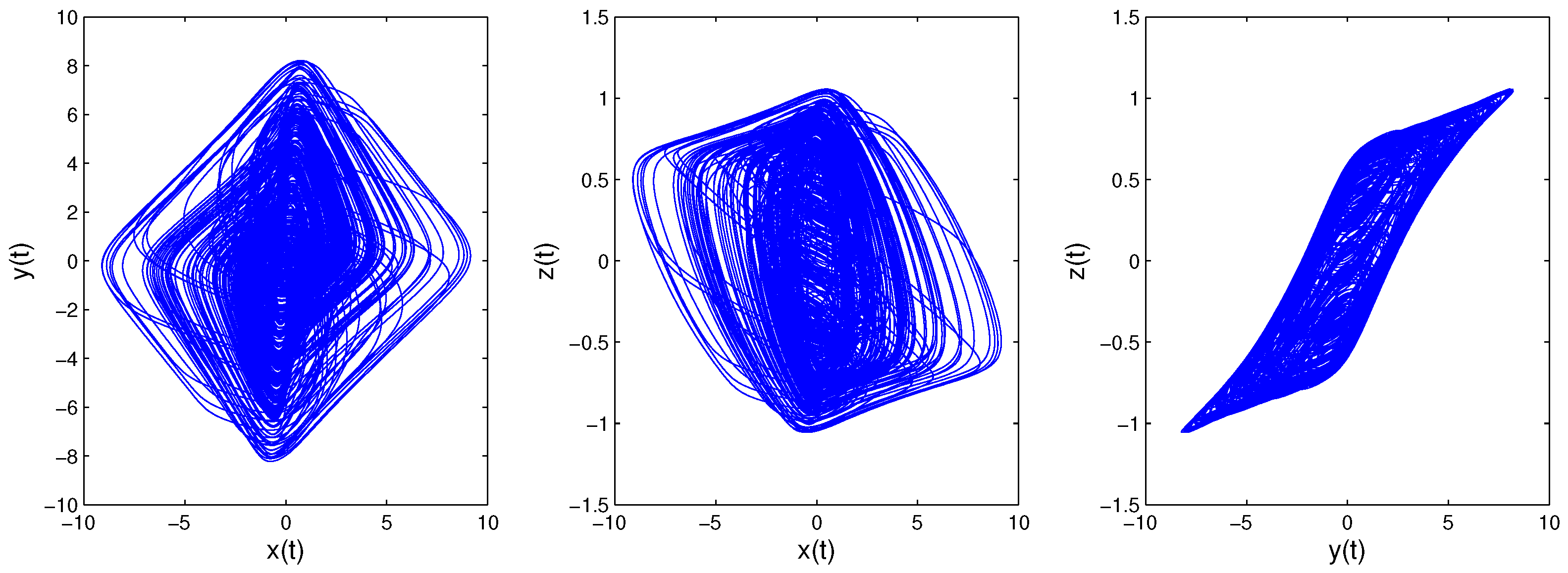
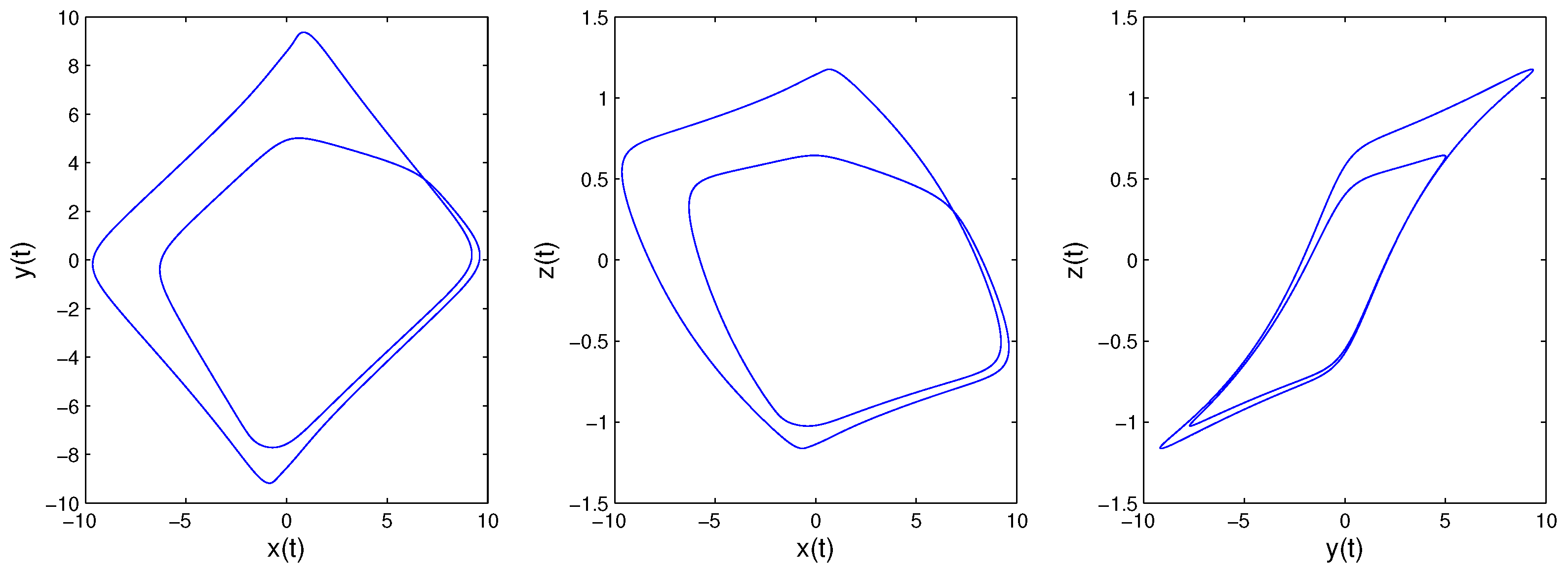
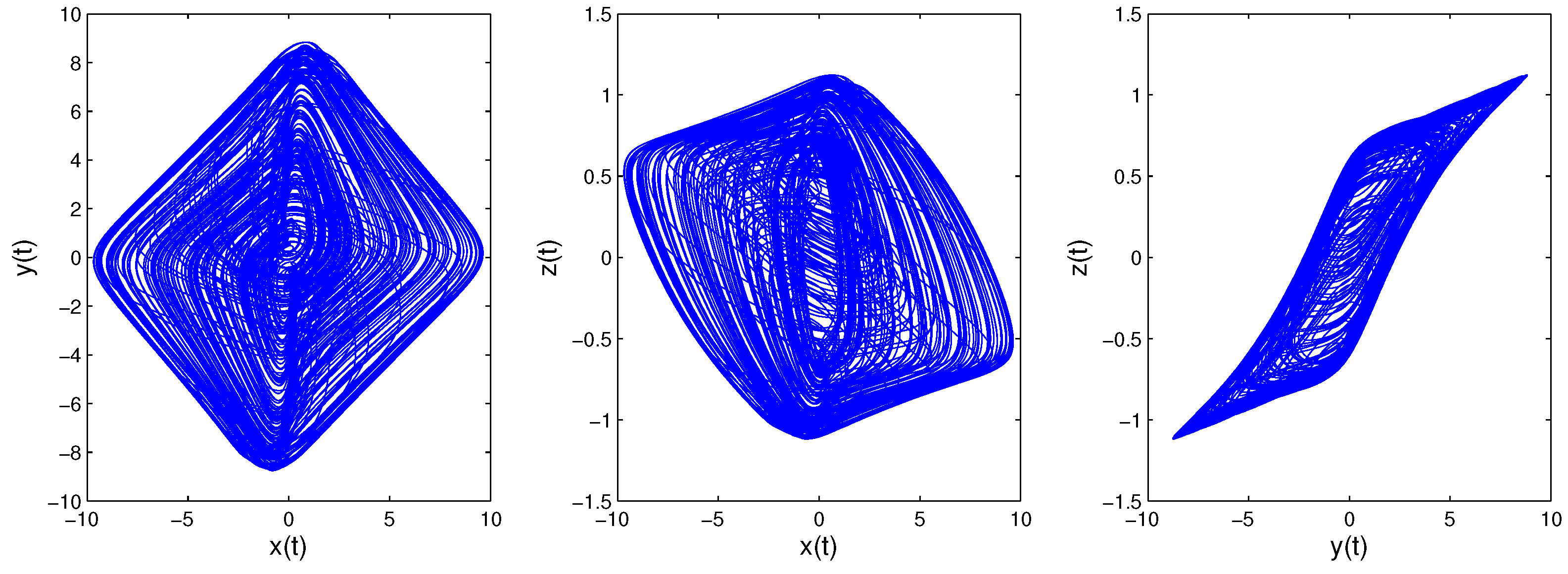
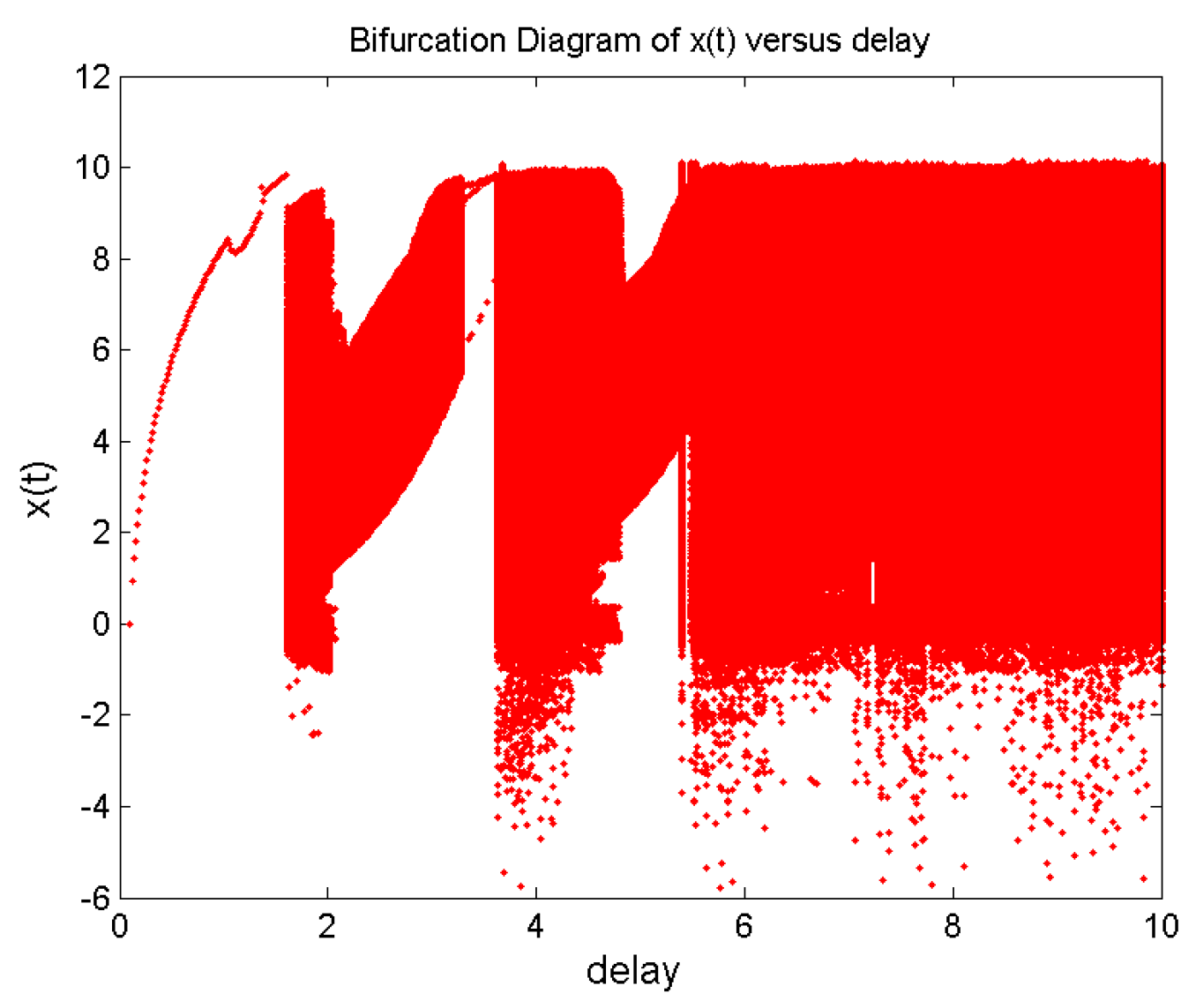
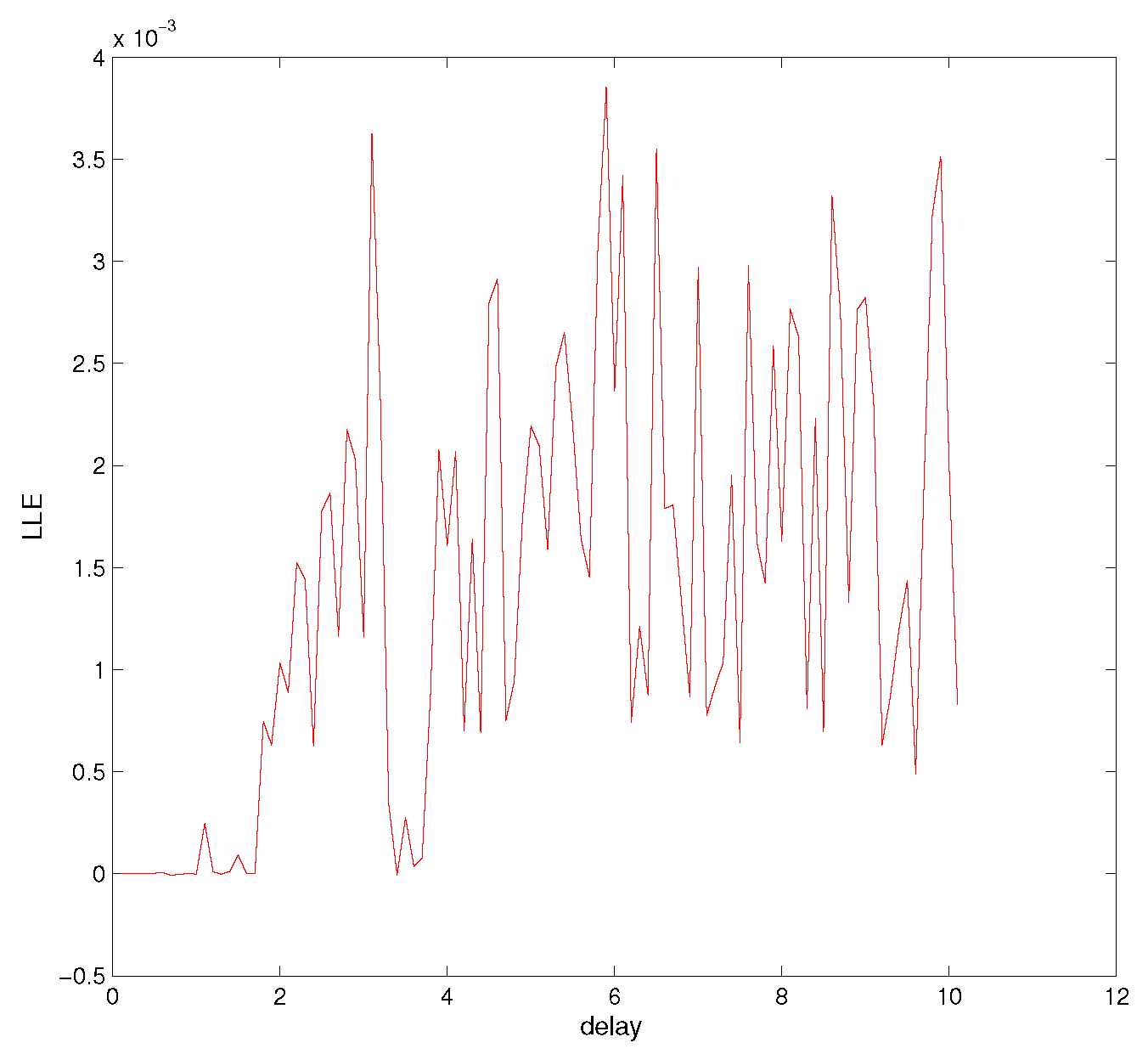
3. Dynamic Analysis of This New Time-Delayed FHNN
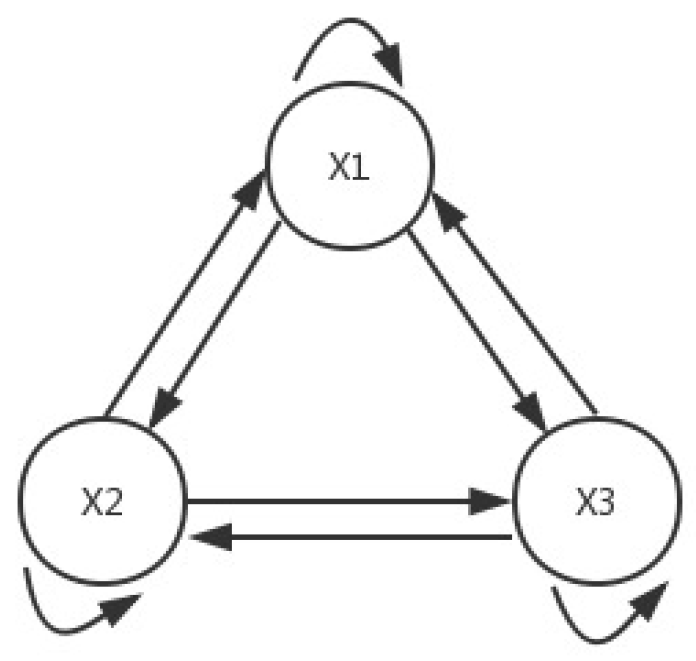
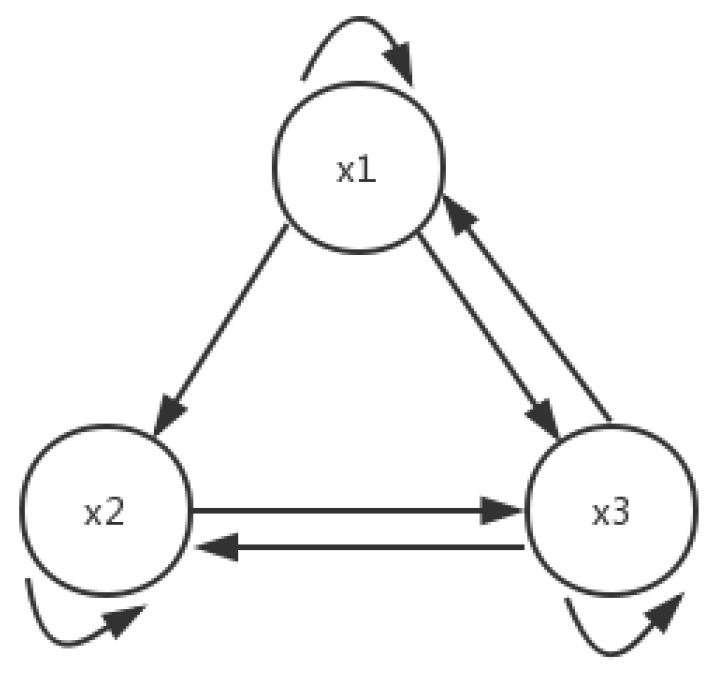
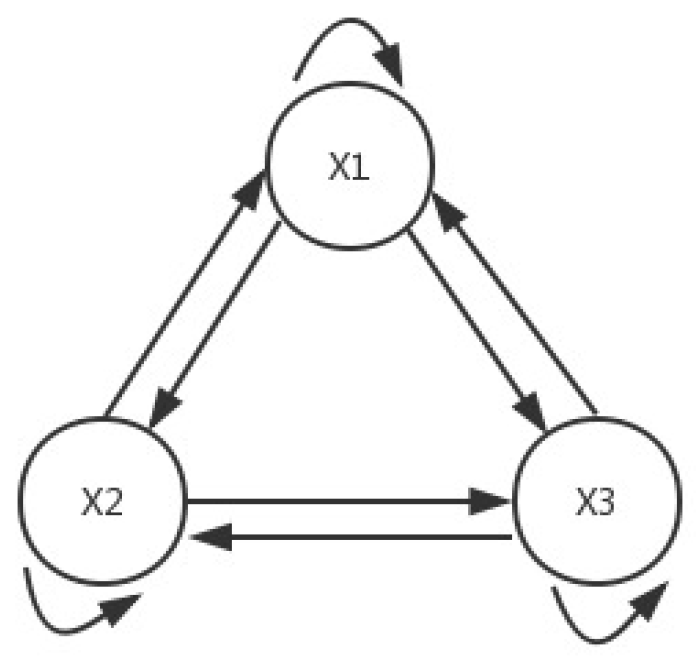
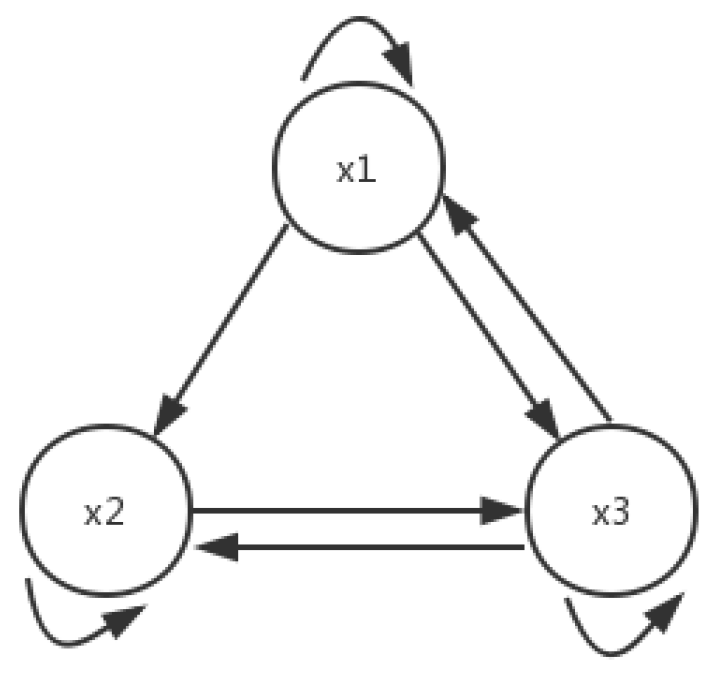
3.1. System Description
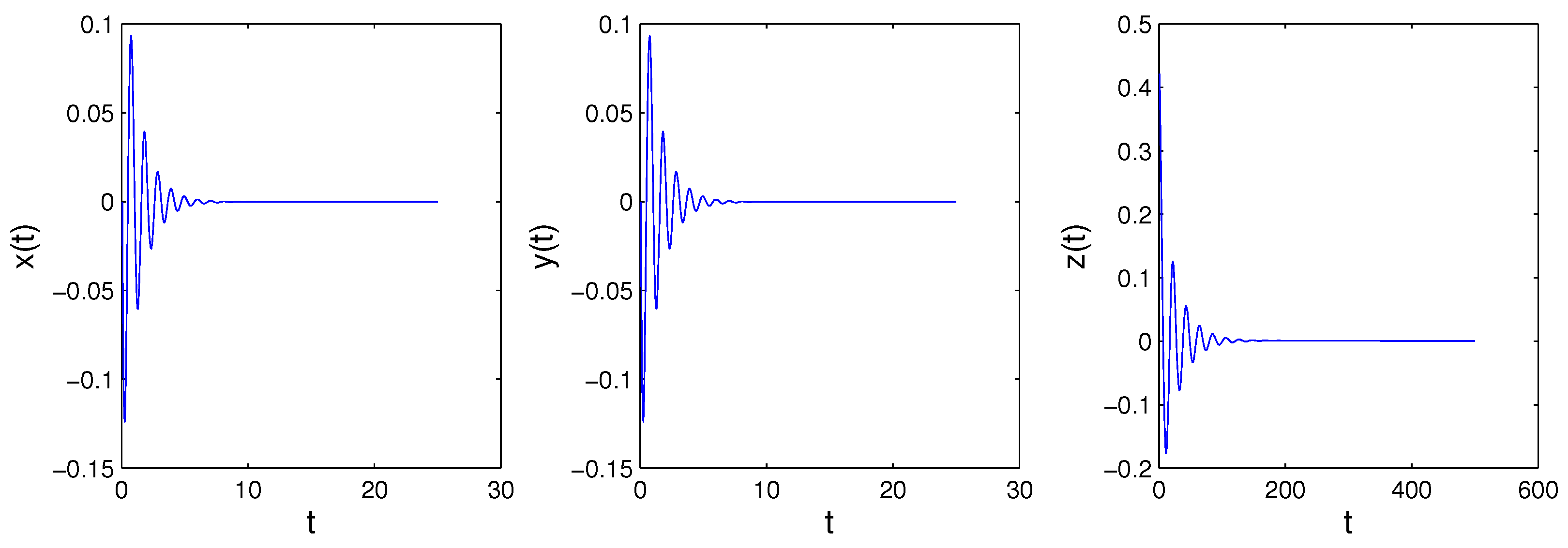
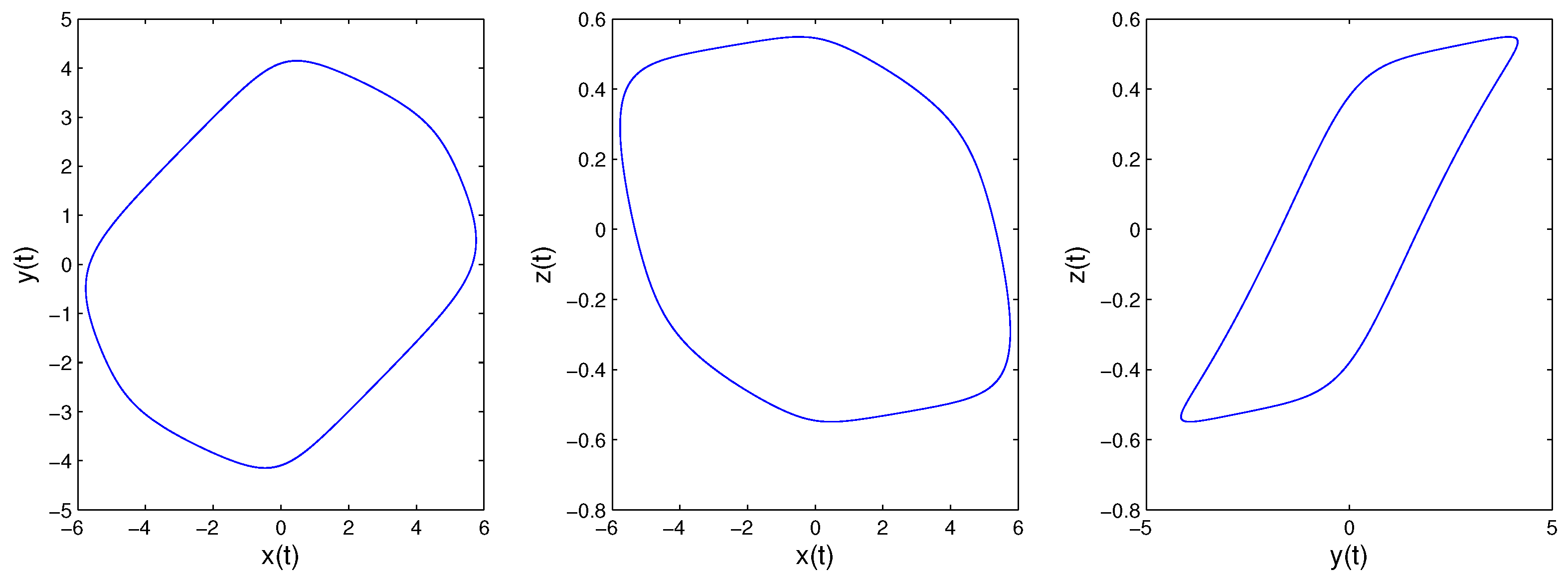
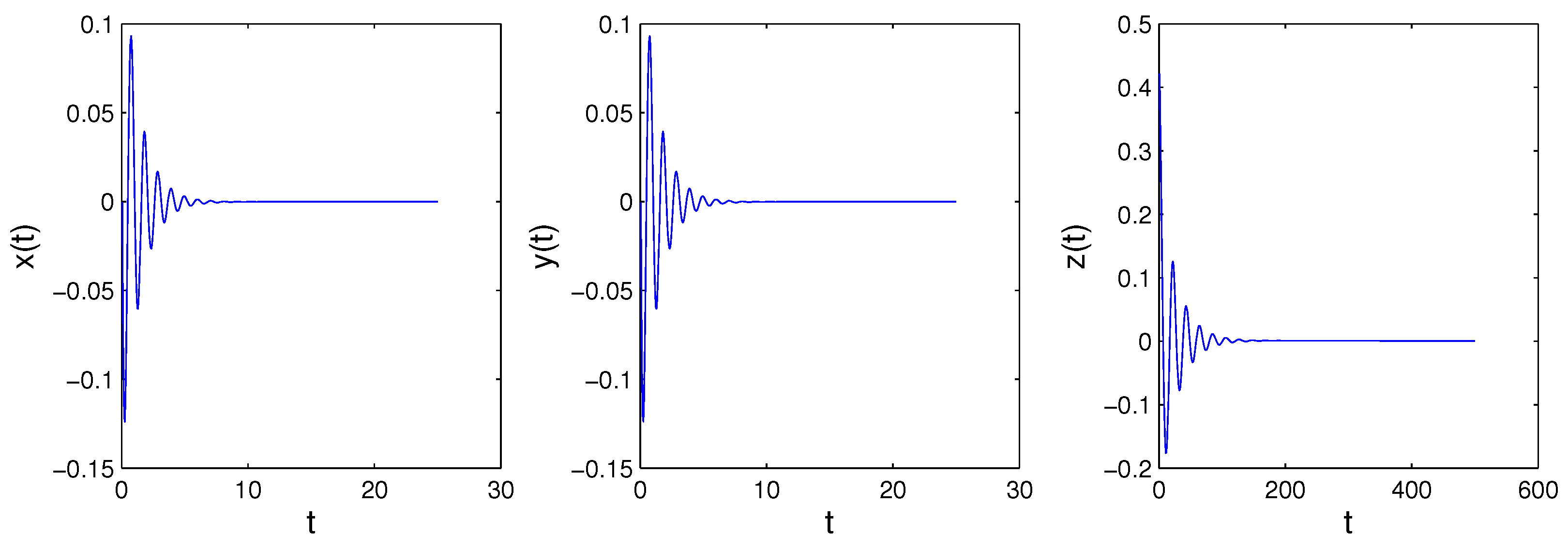
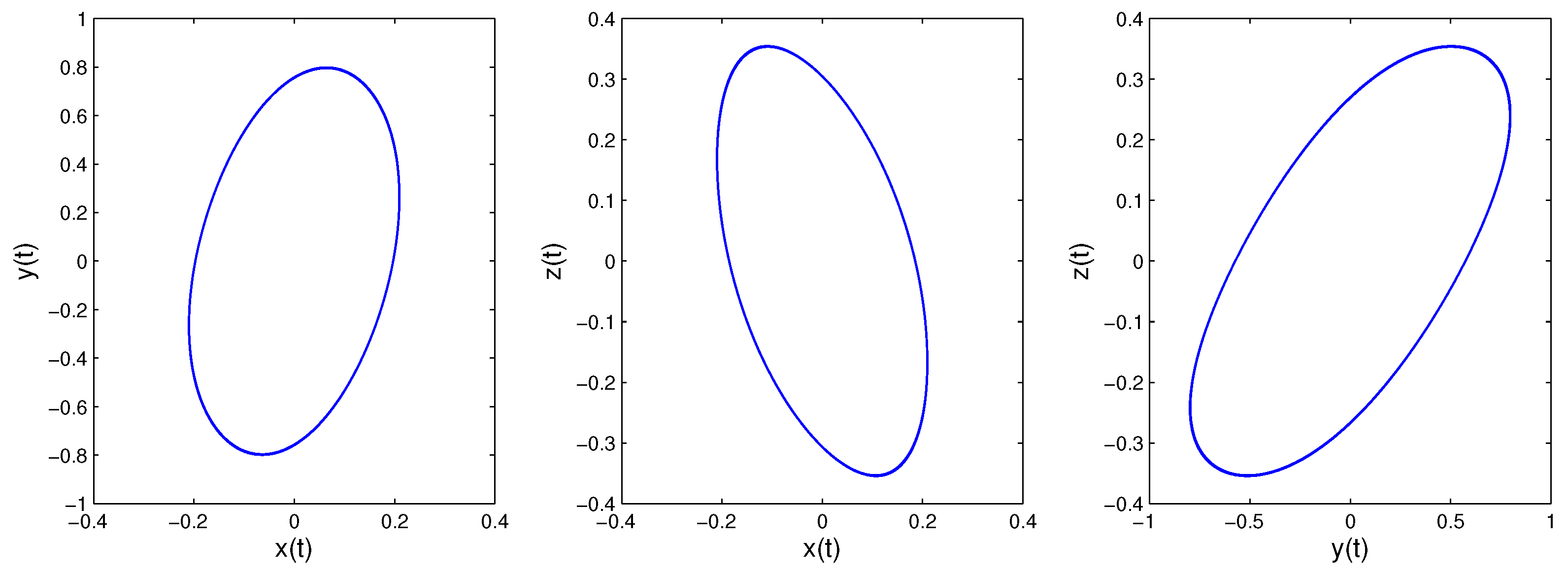
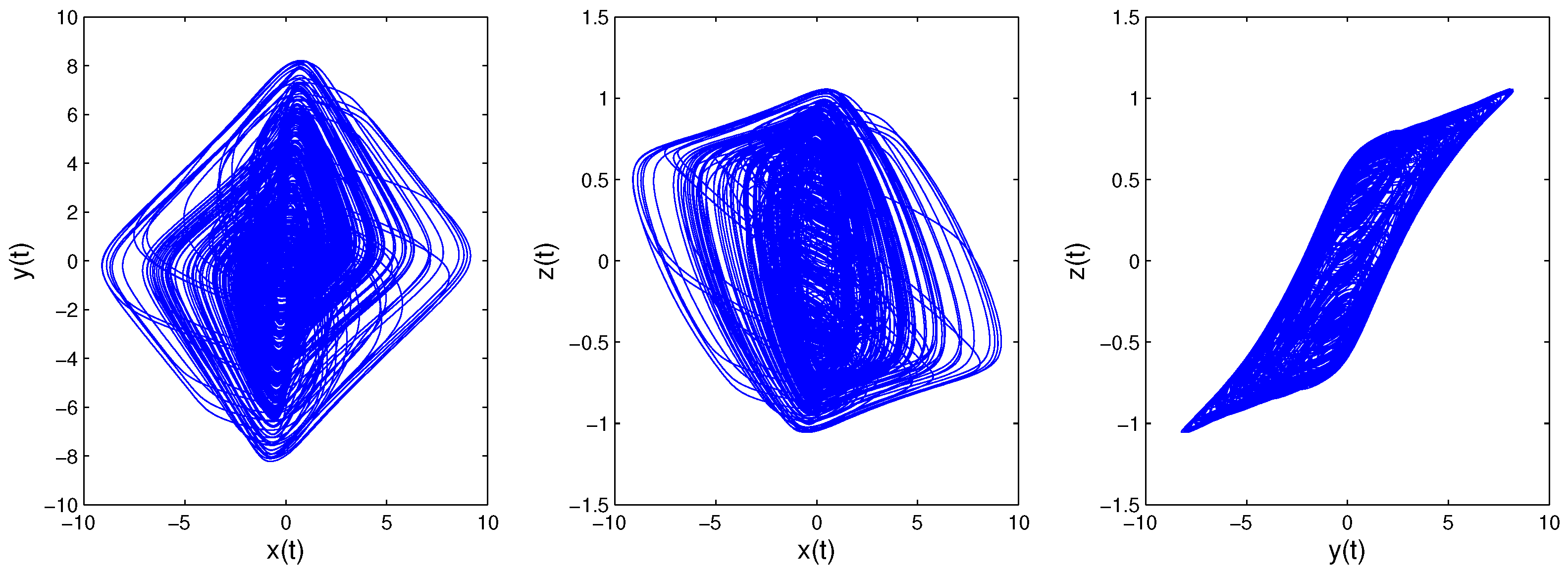
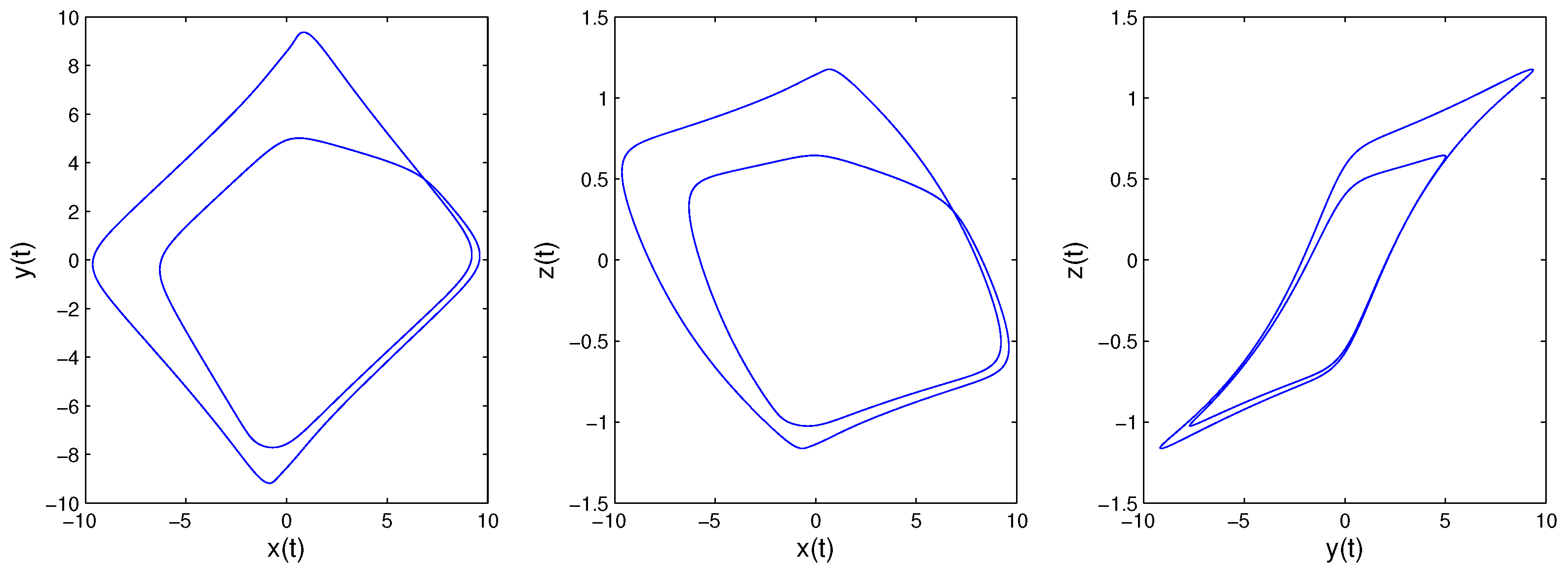
3.2. Dynamic Analysis
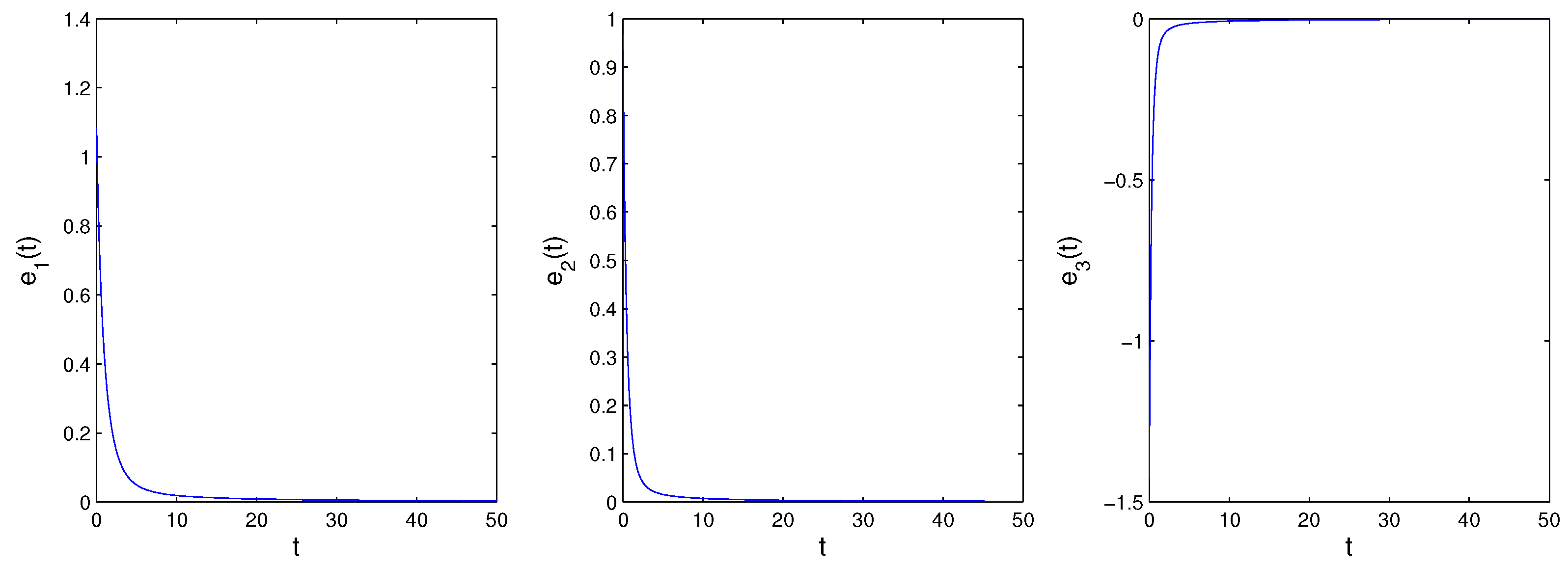
4. Generalized Projective Synchronization of Time-Delayed FHNN
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Associated Press: New York, NY, USA, 1999. [Google Scholar]
- Arena, P.; Caponetto, R.; Fortuna, L.; Porto, D. Nonlinear Noninteger Order Circuits and Systems—An Introduction; World Scientific: Singapore, 2000. [Google Scholar]
- Cafagna, D. Fractional Calculus: A Mathematical Tool from the Past for Present Engineers. IEEE Ind. Electron. Mag. 2007, 1, 35–40. [Google Scholar] [CrossRef]
- Magin, R.L. Fractional calculus in bioengineering. Crit. Rev. Biomed. Eng. 2004, 32, 195–377. [Google Scholar] [CrossRef] [PubMed]
- Manabe, S. A Suggestion of Fractional-Order Controller for Flexible Spacecraft Attitude Control. Nonlinear Dyn. 2001, 29, 251–268. [Google Scholar] [CrossRef]
- Kempfle, S.; Schäfer, S.; Beyer, H. Fractional Calculus via Functional Calculus: Theory and Applications. Nonlinear Dyn. 2002, 29, 99–127. [Google Scholar] [CrossRef]
- Hopfield, J.J. Neurons with graded response have collective computational properties like those of two-state neurons. Proc. Natl. Acad. Sci. USA 1984, 81, 3088–3092. [Google Scholar] [CrossRef]
- Li, H.L.; Cao, J.D.; Jiang, H.J.; Alsaedi, A. Finite-time synchronization of fractional-order complex networks via hybrid feedback control. Neurocomputing 2018, 320, 69–75. [Google Scholar] [CrossRef]
- Guevara, M.R.; Glass, L.; Mackey, M.C.; Shrier, A. Chaos in neurobiology. IEEE Trans. Syst. Man Cybern. 1983, 13, 790–798. [Google Scholar] [CrossRef]
- Babloyantz, A.; Lourenco, C. Brain chaos and computation. Int. J. Neural Syst. 1996, 7, 461–471. [Google Scholar] [CrossRef]
- Freeman, W.J. The physiology of perception. Sci. Am. 1991, 264, 78–85. [Google Scholar] [CrossRef]
- Mata-Machuca, J.L.; Aguilar-Lopez, R. Adaptative synchronization in multi-output fractional-order complex dynamical networks and secure communications. Eur. Phys. J. Plus 2018, 133, 14. [Google Scholar] [CrossRef]
- Kiani, B.A.; Fallahi, K.; Pariz, N.; Leung, H.A. Chaotic secure communication scheme using fractional chaotic systems based on an extended fractional Kalman filter. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 863–879. [Google Scholar] [CrossRef]
- Tlelo-Cuautle, E.; Gerardo, D.L.F.L.; Pham, V.T.; Volos, C.; Jafari, S.; Quintas-Valles, A.D.J. Dynamics, FPGA realization and application of a chaotic system with an infinite number of equilibrium points. Nonlinear Dyn. 2017, 89, 1129–1139. [Google Scholar] [CrossRef]
- Yang, C.H.; Ge, Z.M.; Chang, C.M.; Li, S.Y. Chaos synchronization and chaos control of quantum-CNN chaotic system by variable structure control and impulse control. Nonlinear Anal. Real World Appl. 2010, 11, 977–1985. [Google Scholar] [CrossRef]
- Chen, L.P.; Chai, Y.; Wu, R.C. Linear matrix inequality criteria for robust synchronization of uncertain fractional-order chaotic systems. Chaos 2011, 21, 043107. [Google Scholar] [CrossRef]
- Singh, J.P.; Roy, B.K. Second order adaptive time varying sliding mode control for synchronization of hidden chaotic orbits in a new uncertain 4-D conservative chaotic system. Trans. Inst. Meas. Control 2018, 40, 3573–3586. [Google Scholar] [CrossRef]
- Carbajal-Gomez, V.H.; Tlelo-Cuautle, E.; Sanchez-Lopez, C.; Fernandez-Fernandez, F.V. PVT-Robust CMOS Programmable Chaotic Oscillator: Synchronization of Two 7-Scroll Attractors. Electronics 2018, 7, 252. [Google Scholar] [CrossRef]
- Grassi, G.; Mascolo, S. Nonlinear observer design to synchronize hyperchaotic systems via a scalar signal. IEEE Trans. Circ. Syst. I 1997, 44, 1011–1014. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Yu, Y.G.; Wen, G.G.; Zhang, S.; Yu, J.Z. Global stability analysis of fractional-order Hopfield neural networks with time delay. Neurocomputing 2015, 154, 15–23. [Google Scholar] [CrossRef]
- Huang, X.; Wang, Z.; Li, X.L. Nonlinear Dynamics and Chaos in Fractional-Order Hopfield Neural Networks with Delay. Adv. Math. Phys. 2013, 2013. [Google Scholar] [CrossRef]
- Pu, Y.F.; Yi, Z.; Zhou, J.L. Fractional Hopfield Neural Networks: Fractional Dynamic Associative Recurrent Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2319–2333. [Google Scholar] [CrossRef]
- Xi, Y.G.; Yu, Y.G.; Zhang, S.; Hai, X.D. Finite-time robust control of uncertain fractional-order Hopfield neural networks via sliding mode control. Chin. Phys. B 2018, 27, 010202. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.G.; Geng, L.L. Stability Analysis of Fractional-Order Hopfield Neural Networks with Time-Varying External Inputs. Neural Process Lett. 2017, 45, 223–241. [Google Scholar] [CrossRef]
- Huang, C.D.; Cao, J.D.; Ma, Z.J. Delay-induced bifurcation in a tri-neuron fractional neural network. Int. J. Syst. Sci. 2016, 47, 3668–3677. [Google Scholar] [CrossRef]
- Chen, L.P.; Qu, J.F.; Chai, Y.; Wu, R.C.; Qi, G.Y. Synchronization of a Class of Fractional-Order Chaotic Neural Networks. Entropy 2013, 15, 3265–3276. [Google Scholar] [CrossRef] [Green Version]
- Kaslik, E.; Sivasundaram, S. Nonlinear dynamics and chaos in fractional-order neural networks. Neural Netw. 2012, 32, 245–256. [Google Scholar] [CrossRef] [PubMed]
- Munoz-Pacheco, J.M.; Zambrano-Serrano, E.; Volos, C.; Jafari, S.; Kengne, J.; Rajagopal, K. A New Fractional-Order Chaotic System with Different Families of Hidden and Self-Excited Attractors. Entropy 2018, 20, 564. [Google Scholar] [CrossRef]
- Zúñiga-Aguilar, C.J.; Coronel-Escamilla, A.; Gómez-Aguilar, J.F.; Alvarado-Martínez, V.M.; Romero-Ugalde, H.M. New numerical approximation for solving fractional delay differential equations of variable order using artificial neural networks. Eur. Phys. J. Plus 2018, 133, 75. [Google Scholar] [CrossRef]
- Bhalekar, S.; Daftardar-Gejji, V. A predictor corrector scheme for solving nonlinear delay differential equations of fractional-order. J. Fract. Calculus Appl. 2011, 1, 1–9. [Google Scholar]
- Zúñiga-Aguilar, C.J.; Romero-Ugalde, H.M.; Gomez-Aguilar, J.F.; Escobar-Jimenez, R.F.; Valtierra-Rodriguez, M. Solving fractional differential equations of variable-order involving operators with Mittag-Leffler kernel using artificial neural networks. Chaos Solitons Fract. 2017, 103, 382–403. [Google Scholar] [CrossRef]
- Forti, M.; Marini, M.; Manetti, S. Necessary and sufficient condition for absolute stability of neural networks. IEEE Trans. Circuits Syst. I Fund. Theory Appl. 1994, 41, 491–494. [Google Scholar] [CrossRef]
- Hegger, G.; Kantz, H.; Schreiber, T. Practical implementation of nonlinear time series methods: The TISEAN package. Chaos 1999, 9, 413–435. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, D. Nonlinear active observer-based generalized synchronization in time-delayed systems. Nonlinear Dyn. 2010, 59, 289–296. [Google Scholar] [CrossRef]
- Cafagna, D.; Grassi, G. Fractional-order systems without equilibria: The first example of hyperchaos and its application to synchronization. Chin. Phys. B 2015, 24, 080502. [Google Scholar] [CrossRef]
- Jia, Y.Q.; Jiang, G.P. Chaotic system synchronization of state-observer-based fractional-order time-delay. Acta Phys. Sin. 2017, 66, 160501. [Google Scholar] [CrossRef]
- Liu, L.; Liang, D.L.; Liu, C.X. Nonlinear state-observer control for projective synchronization of a fractional-order hyperchaotic system. Nonlinear Dyn. 2012, 69, 1929–1939. [Google Scholar] [CrossRef]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, H.-P.; Wang, J.-K.; Xie, F.-L. Dynamics Analysis of a New Fractional-Order Hopfield Neural Network with Delay and Its Generalized Projective Synchronization. Entropy 2019, 21, 1. https://doi.org/10.3390/e21010001
Hu H-P, Wang J-K, Xie F-L. Dynamics Analysis of a New Fractional-Order Hopfield Neural Network with Delay and Its Generalized Projective Synchronization. Entropy. 2019; 21(1):1. https://doi.org/10.3390/e21010001
Chicago/Turabian StyleHu, Han-Ping, Jia-Kun Wang, and Fei-Long Xie. 2019. "Dynamics Analysis of a New Fractional-Order Hopfield Neural Network with Delay and Its Generalized Projective Synchronization" Entropy 21, no. 1: 1. https://doi.org/10.3390/e21010001
APA StyleHu, H.-P., Wang, J.-K., & Xie, F.-L. (2019). Dynamics Analysis of a New Fractional-Order Hopfield Neural Network with Delay and Its Generalized Projective Synchronization. Entropy, 21(1), 1. https://doi.org/10.3390/e21010001