1. Introduction
With the development of scientific and technological research, research objects in various fields such as mechanical engineering, data mining, image processing, information retrieval, and genome engineering are becoming increasingly complex. Therefore, the volume of experimentally acquired data, such as product fault data, genetic data, and high-definition image information, has also increased exponentially, as has the number of feature dimensions [
1]. Multidimensional feature parameters usually exhibit sparsity. The information between any feature parameters overlaps and complements each other while there are various problems facing data description, such as poor overall identification, heavy calculation, difficulty in visualization, and incorrect conclusions. To this end, subspace learning algorithms, such as Principal Component Analysis (PCA) [
2], Kernel Principal Component Analysis (KPCA) [
3], Linear Discriminant Analysis (LDA) [
4], Locality Preserving Projections (LPP) [
5], and Locally Linear Embedding (LLE) [
6], have gradually been applied to information fusion of multidimensional feature parameters. However, these methods have failed to consider the possible redundant and irrelevant feature parameters in the multidimensional feature parameter space, of which redundant features might reduce the information fusion efficiency of the subspace learning algorithms and irrelevant features might undermine the performance of subspace learning algorithms. This might eventually lead to reduced information fusion performance of the aforementioned subspace learning algorithms and affect their precision and stability [
7].
With the feature selection method, the optimal feature parameter subset can be obtained and the redundant and irrelevant features in it can be eliminated with minimum information loss, thereby enhancing algorithm performance and saving running time [
8]. In view of the problems above, a feature selection method was used to eliminate the redundant and irrelevant features in the feature parameter subset. Considering that the data in engineering practice and application is mostly unlabeled, feature selection should be made using the unsupervised method since it does not require data labels and select the feature subset that contain the key properties of the original feature set from a data perspective [
1]. Currently, unsupervised feature selection method is made using a combined method of the search algorithm (such as genetic algorithm [
9,
10] and ant colony optimization [
11,
12]) and feature parameter subset evaluation criterion (fractal dimension [
13,
14] and rough set theory [
15]). However, such a method might result in reduced precision of subsequent algorithms since they are troubled by heavy calculations, long running times and high time complexities
O(2
n) [
7]. In certain instances, there might not be an optimal solution.
In information theory, entropy is a measure of uncertainty in a physical system [
16,
17]. Based on this definition, the information shared by two things, namely the interdependence between them, can be characterized by mutual information (MI). Thus, MI is an effective tool of measuring feature relevance and redundancy. Similar with the “Minimum Redundancy and Maximum Relevance (mRMR)” [
18] of the supervised method, the basic idea of a MI-based unsupervised method also takes the redundancy and relevance of any feature parameter into overall consideration. As the quantitative index of fractal theory, fractal dimension (FD) measures the similar structures between entirety and locality [
13,
14,
19,
20,
21], for which the similar properties between the feature parameter set and its subsets can be evaluated using FD. In this study, a mutual information and fractal dimension-based unsupervised feature selection (UFS-MIFD) method was developed based on the characteristics of MI and FD. To begin with, the linear ordering of feature parameters by importance was conducted as per their maximum “relevance” to the feature parameter set and minimum “redundancy” ordered feature set. The optimal feature parameter subset was selected from the ordered feature parameter set by using FD as the criterion of feature subset evaluation. Compared with existing feature selection algorithms, this method not only featured linear time complexity, significantly shortened running time, and greatly reduced searches, but the redundant and irrelevant features in the feature parameter set were also eliminated.
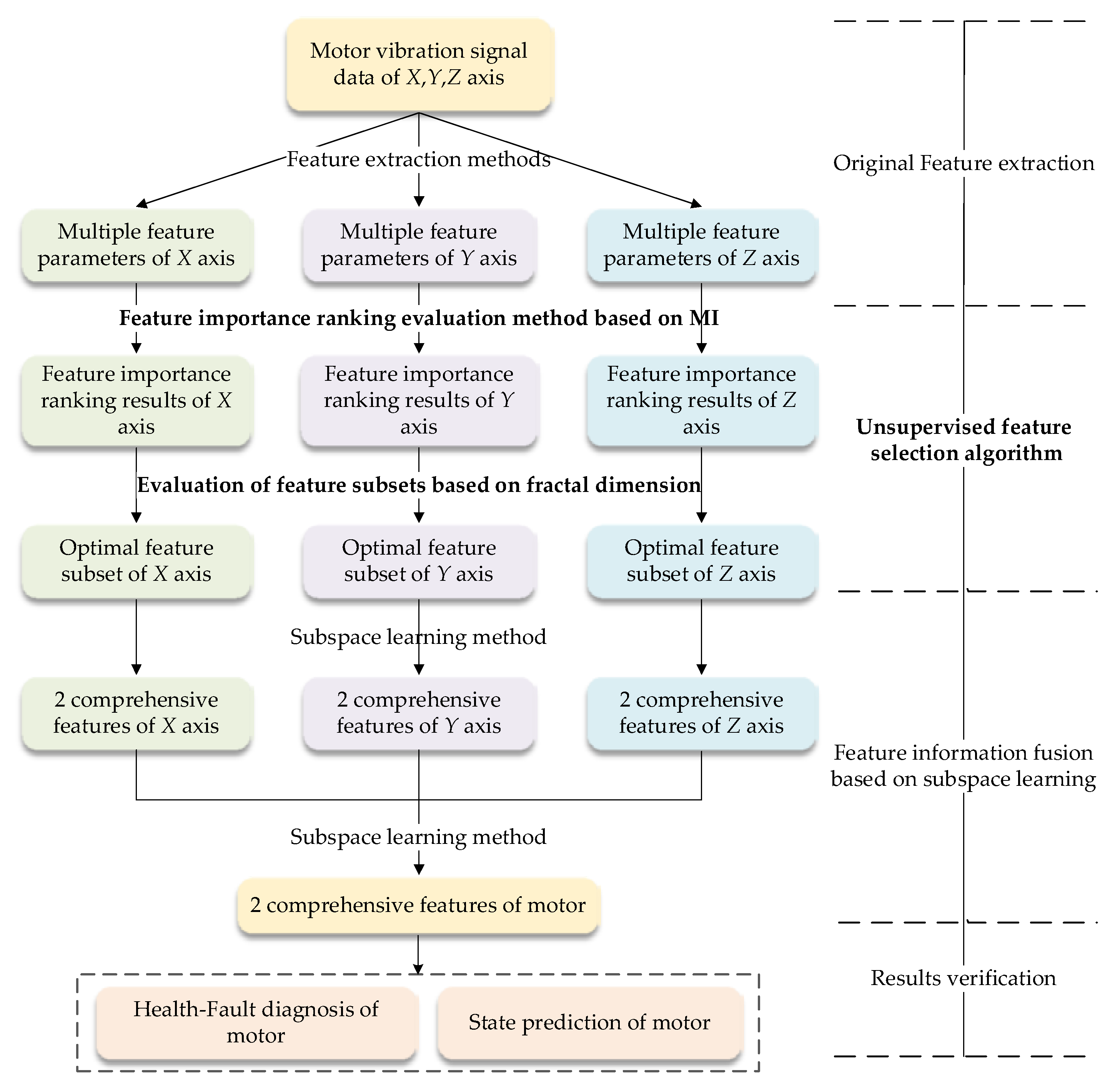
Multi-rotor Unmanned Aerial Vehicles (UAVs) represent a new type of UAV with prominent features, such as simple mechanical structure, convenient use and maintenance, vertical take-off and landing, and rapid release, which make multi-rotor UAVs studied and applied in many fields such as military surveillance, power line inspection, pesticide spraying, and other fields such as express delivery in recent years. The brushless direct current (DC) motor is a power supply unit in multi-rotor UAVs, and its safety and reliability directly affects the reliability level of the multi-rotor UAV itself. Therefore, in this paper, a brushless DC motor performance degradation test was designed to acquire vibrational signals, which are used as the data source to verify the proposed method from the perspectives of fault diagnosis and state prediction. The UFS-MIFD method was investigated as shown in
Figure 1. The rest if this paper is organized as follows: the process of UFS-MIFD is presented in
Section 2. The brushless DC motor, the test method and process, and vibration signal acquisition and analysis are introduced in
Section 3. In
Section 4, the original feature parameter set is extracted based on motor vibration signals; the implementation of UFS-MIFD algorithm is also introduced. In
Section 5, the validity of the proposed UFS-MIFD is verified based on the information fusion result of the output subspace learning algorithm obtained in
Section 4 from the perspectives of the motor health-fault diagnosis effect and motor state prediction. Conclusions of this study and prospects for further studies are presented in
Section 6.
2. Mutual Information and Fractal Dimension-Based Unsupervised Feature Parameters Selection Method
2.1. Theoretical Basis
2.1.1. Mutual Information (MI)
Mutual information is defined based on information entropy. It measures the interdependence between two features, which means it represents the information shared by both features. Suppose that there is a feature parameter set
F comprising
n feature parameters
. According to information entropy theory, the mutual information between feature parameters
and
can be defined as:
where
is the information entropy of feature
(see Equation (2)) [
16,
17];
is the probability of feature variable
taking different probable values, which measures the uncertainty of the value of
;
is the conditional entropy (see Equation (3)), which means the uncertainty of
when the value of another feature
is known:
In fact, however, the relevance between the feature parameters in the feature parameter set and their redundant features cannot be measured directly by MI, for which the mRMR criterion in the supervised method is required to measure the relevance and redundancy of features.
2.1.2. Fractal Dimension
Fractals are ubiquitous in Nature. Due to the limited data points in the data set, the dataset shows fractal features only within a certain scale range, namely when the local distribution and global distribution of the dataset share similar structure or properties. In this case, it can be analyzed using fractal theory [
13,
14,
19,
20,
21]. FD is the quantitative index of fractal theory. There are a variety of methods that can be used to calculate the FD of the dataset, of which the box-counting method is easy to implement and widely used. Therefore, FD was also calculated using box-counting method in this paper. With this method, the dataset is covered using a hypercube with a scale of
ε, thereby obtaining the FD of the dataset. In non-scaling interval
, the FD of feature parameter set
X with
N dimensions can be calculated using the following Equation (4):
where
ε is the side length of the hypercube;
N(
ε) is the minimum number of hypercubes with a side length of
ε that cover
X. The points are plotted in the double logarithm coordinates based on the equation above. The least squares method is used to fit non-scaling interval
, thus obtaining the FD of the dataset.
2.2. UFS-MIFD Method
The fundamental theories mentioned in
Section 2.1 were extended in this paper. A UFS-MIFD algorithm was developed by drawing from mRMR of the supervised method. To begin with, the relevancy, conditional relevancy and redundancy between feature parameters [
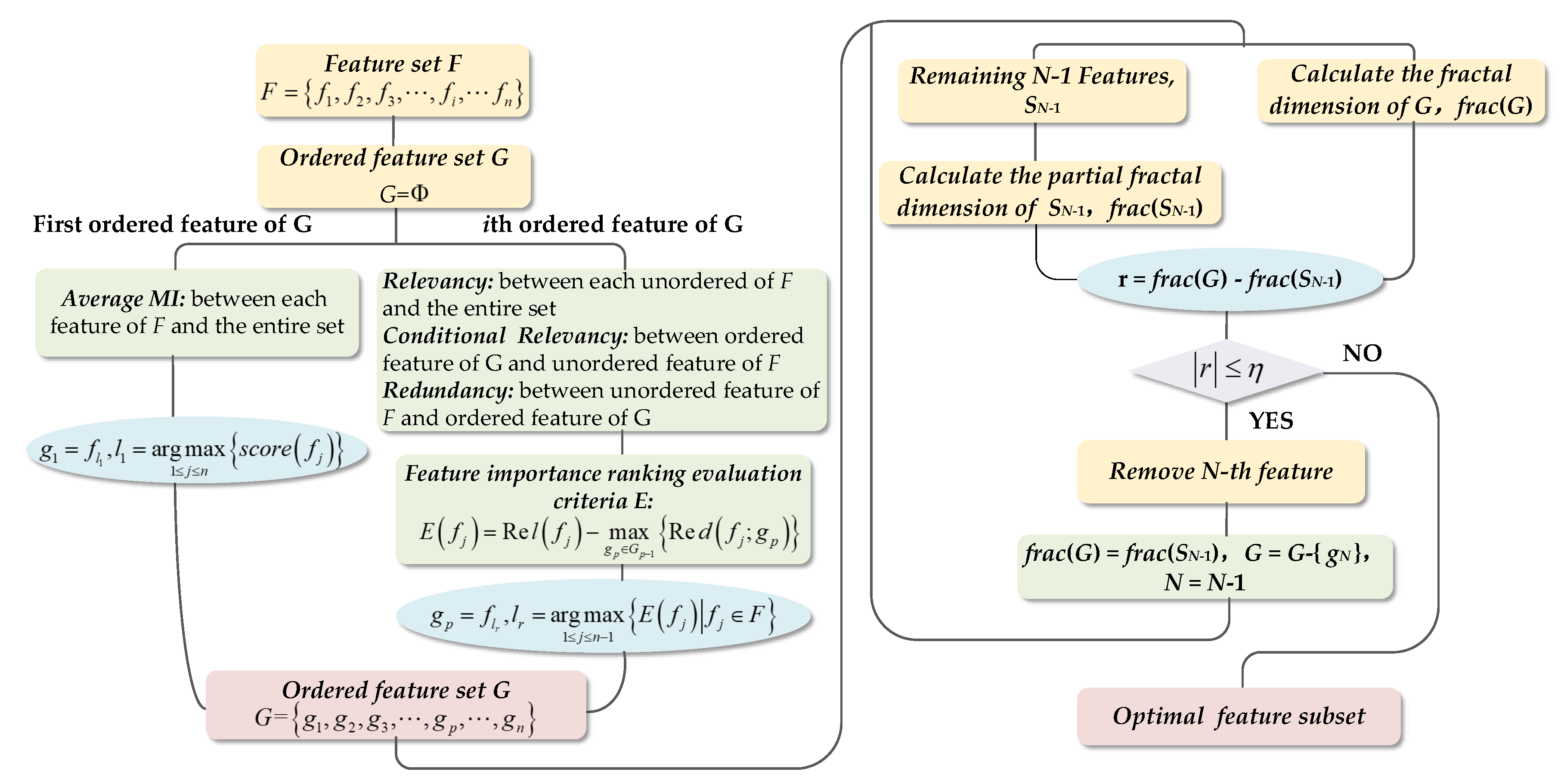
7] were defined and calculated. With overall consideration, the mRMR criterion for feature parameter importance ordering was obtained, based on which the importance ordering of feature parameters contained in the feature parameter set was conducted. The less important a feature parameter was, the lower the relevancy between the parameter and the overall feature parameter set and the higher the redundancy was. Next, the feature subsets of the ordered parameter set were selected as per the FD-based feature subset evaluation criterion, thereby eliminating the feature parameters with lower relevancy and high redundancy from the feature parameter set. The algorithmic process is as follows:
First, the importance ordering of various feature parameters in the n-dimensional original feature parameter set was conducted stepwise. The ordered feature set was supposed as G and left empty.
Step 1: The average MI between the whole feature parameter set
F and every feature
was calculated using Equation (5):
Thus, the first important feature in G could be , where . This feature was able to minimize the uncertainty of the rest of features in F.
Step 2: To obtain the second important feature in
G,
was replaced by
. In this case, feature
, where
, was selected randomly from
F to calculate its relevancy
with
F, the conditional relevancy
between
in
G and
, and the redundancy
of
with respect to
, of which
was defined as the average MI between
and
F [
7]:
where
signifies the information
contains;
means the information shared by
and other parameters in
F. The larger
was, the less the new information the other parameters could provide. Therefore, if the feature parameter with the largest
was selected, there would be the least information loss in the corresponding parameter set. The conditional relevancy
between
and
could be defined as [
7]:
The redundancy
of
with respect to
could be defined as follows [
7]:
Thus, the importance evaluation criterion
E for feature parameter
could be obtained by taking the relevance between
and
F and the redundancy of
with respect to
G into overall consideration:
Suppose that , the second feature in G was .
Step 3: Similarly, the original
F was replaced by
to obtain the
p-th important feature in
G. In this case, feature
, where
, was selected randomly from
F. The relevance
between
and
F, the conditional relevance
between
in
G and
, and the redundancy
of
with respect to
, where, were calculated using Equations (6)–(8). Thus, the importance evaluation criterion
E for feature parameter
could be obtained by taking the relevance between
and
F and the redundancy of
with respect to
G into overall consideration:
Suppose that , p-th feature in G was .
Step 3 was repeated until all the feature parameters in the original feature parameter set F were ordered by their importance, that is, the ordered feature parameter set G was obtained.
Step 4: On that basis, the subsets of the ordered feature parameter set G were selected using the FD-based feature parameter subset evaluation criterion proposed in this study. The main idea was that the feature parameter subsets wherein the difference between the partial fractal dimension and overall fractal dimension satisfied a certain threshold were reserved by eliminating the feature parameter that had the least influence on the feature parameter set once at a time. The steps are given as follows:
- (1)
The FD of N-dimensional ordered feature parameter set G was calculated, denoted as frac(G).
- (2)
With the N-th feature parameter eliminated from G, there were N − 1 feature parameters, which constituted a new feature parameter subset SN−1. To distinguish between SN−1 and frac(G), the fractal dimension frac(SN−1) of SN−1 was named the local fractal dimension. According to calculation, r = frac(G) − frac(SN−1). If ( was the threshold parameter), SN−1 was considered similar with G. Although the N-th feature parameter had been eliminated, it would not make a difference to G, which suggested that the N-th feature parameter was a highly redundant parameter that was less correlated to G.
- (3)
Let frac(G) = frac(SN−1), G = G−{}, and N = N − 1. The calculation in step (2) was continued until . At this point, the feature parameter subset was the optimal feature parameter subset.
The flow diagram of the proposed method is shown in
Figure 2.
3. Motor Vibration Data Acquisition and Signal Analysis
This section may be divided by subheadings. It should provide a concise and precise description of the experimental results, their interpretation as well as the experimental conclusions that can be drawn.
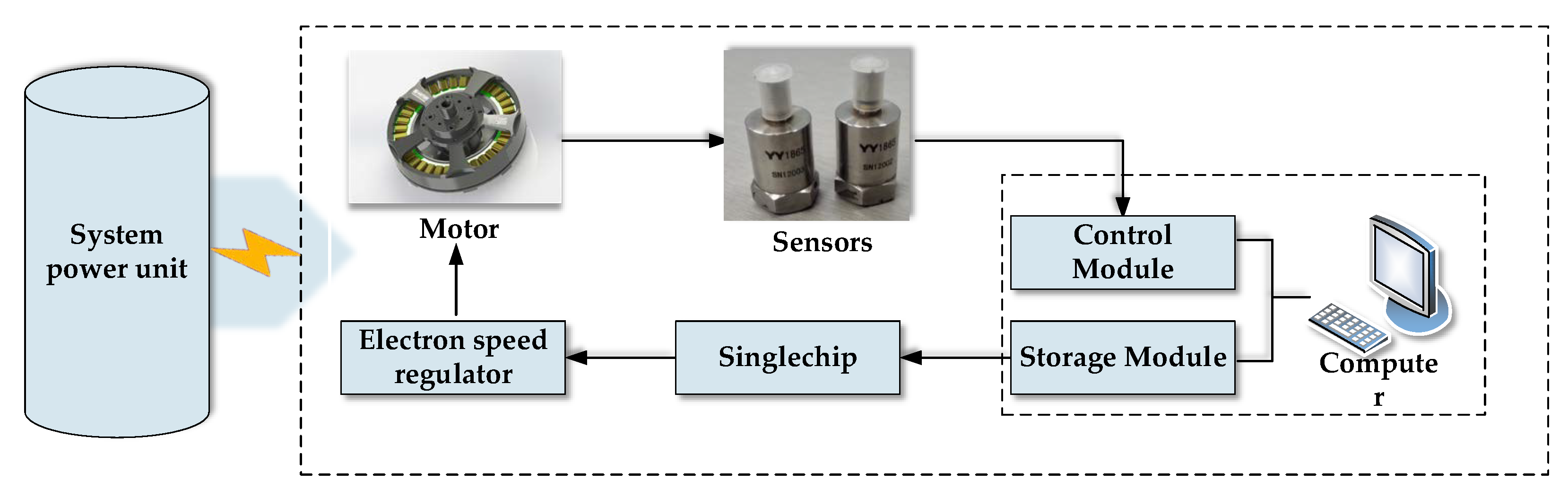
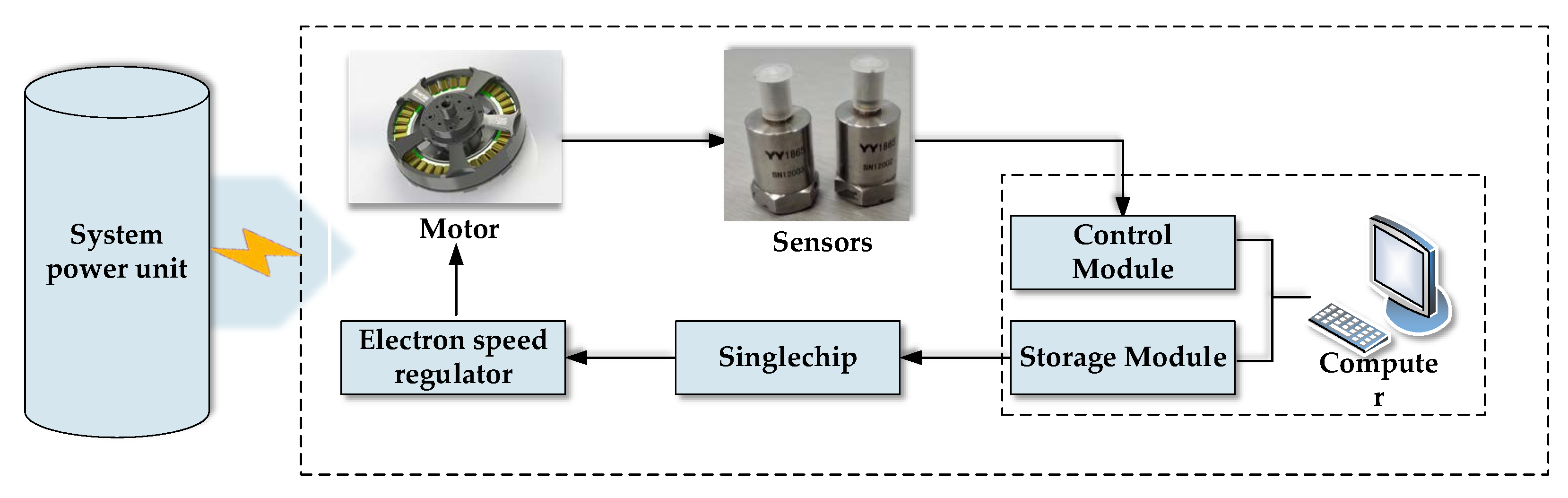
In this paper, the power motor (the U8 disc type brushless DC motor from T-MOTOR) of an unmanned multi-rotor gyroplane was taken as the research object, based on which a test was designed to monitor the vibrational signals during motor operation. Vibrational signals were used as the sample data for verifying the proposed method and motor performance degradation. The test system is shown in
Figure 3. The working process was: the single chip microcomputer that was controlled by the control module of the computer sent pulse-width modulation (PWM) signals to the digital speed regulator that controlled motor operation. Motor vibration signals along
X, Y and
Z-axes were acquired using the acceleration sensor, which were then stored in the storage module of the computer. The modules of the test system were powered using the system power unit.
This motor performance degradation test was carried out at a 22.2 V rated operating voltage and 100% throttle. The test conditions are shown in
Table 1.
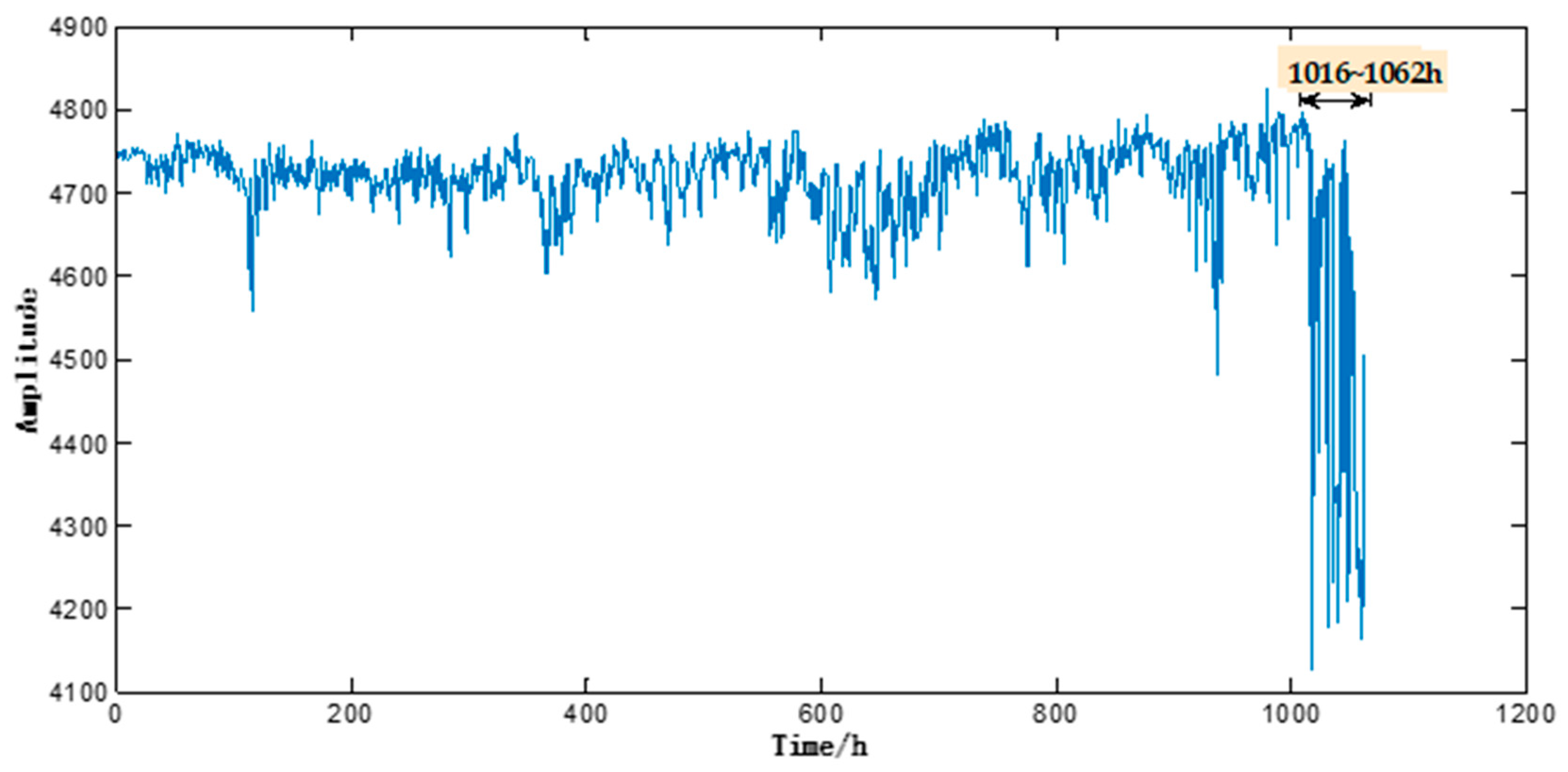
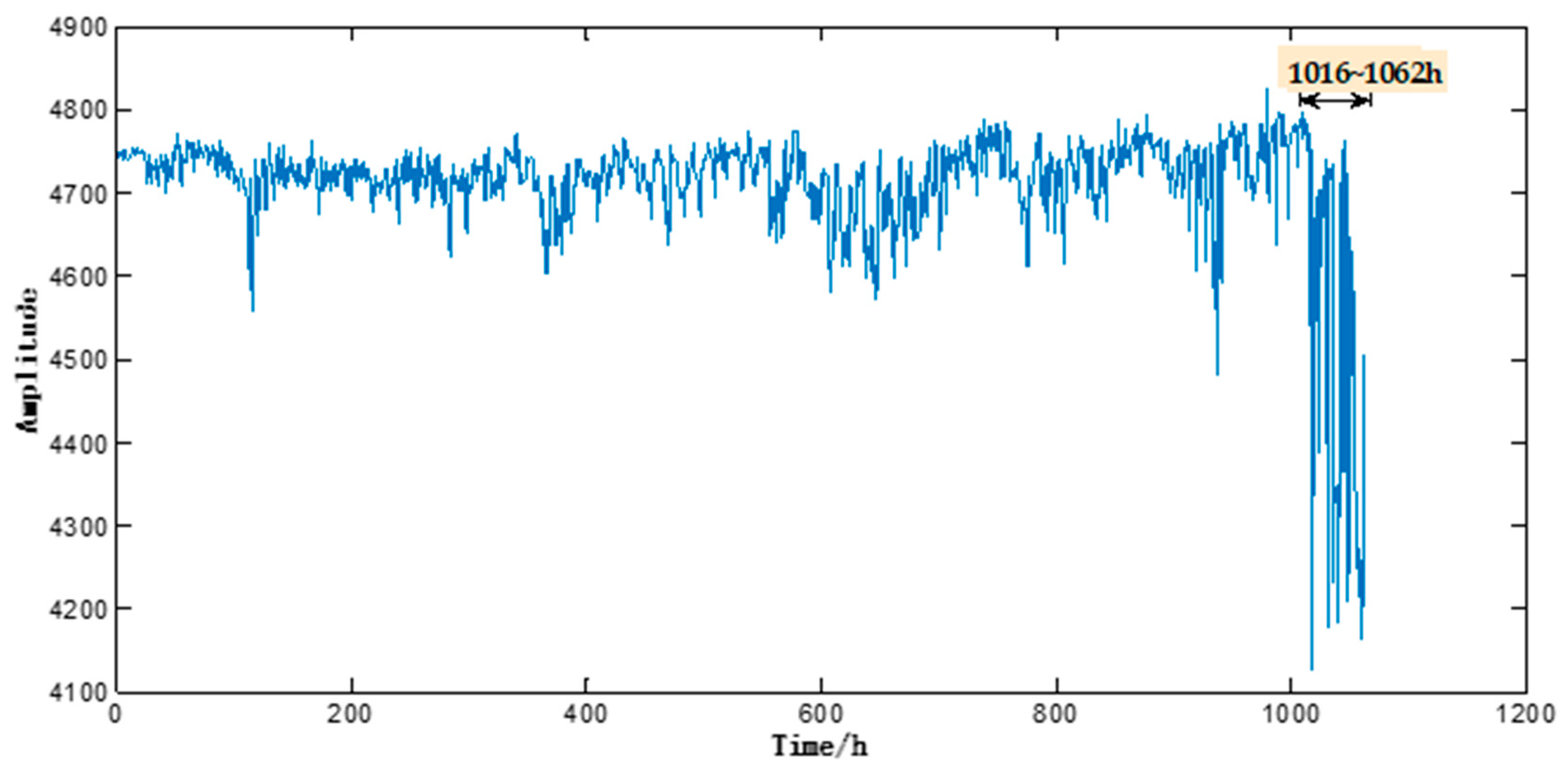
This motor performance degradation test lasted 1062 h, during which the 1416 sample signals (each signal lasted 0.5 s) were captured and recorded at a time interval of 45 min from
X,
Y and
Z-axes. As shown in
Figure 4, the motor sample under test ran basically stably during 0–1016 h, but an abrupt change of its operating state was observed during 1017–1062 h. Such abnormality continued without any sign of weakening or disappearing. As shown in
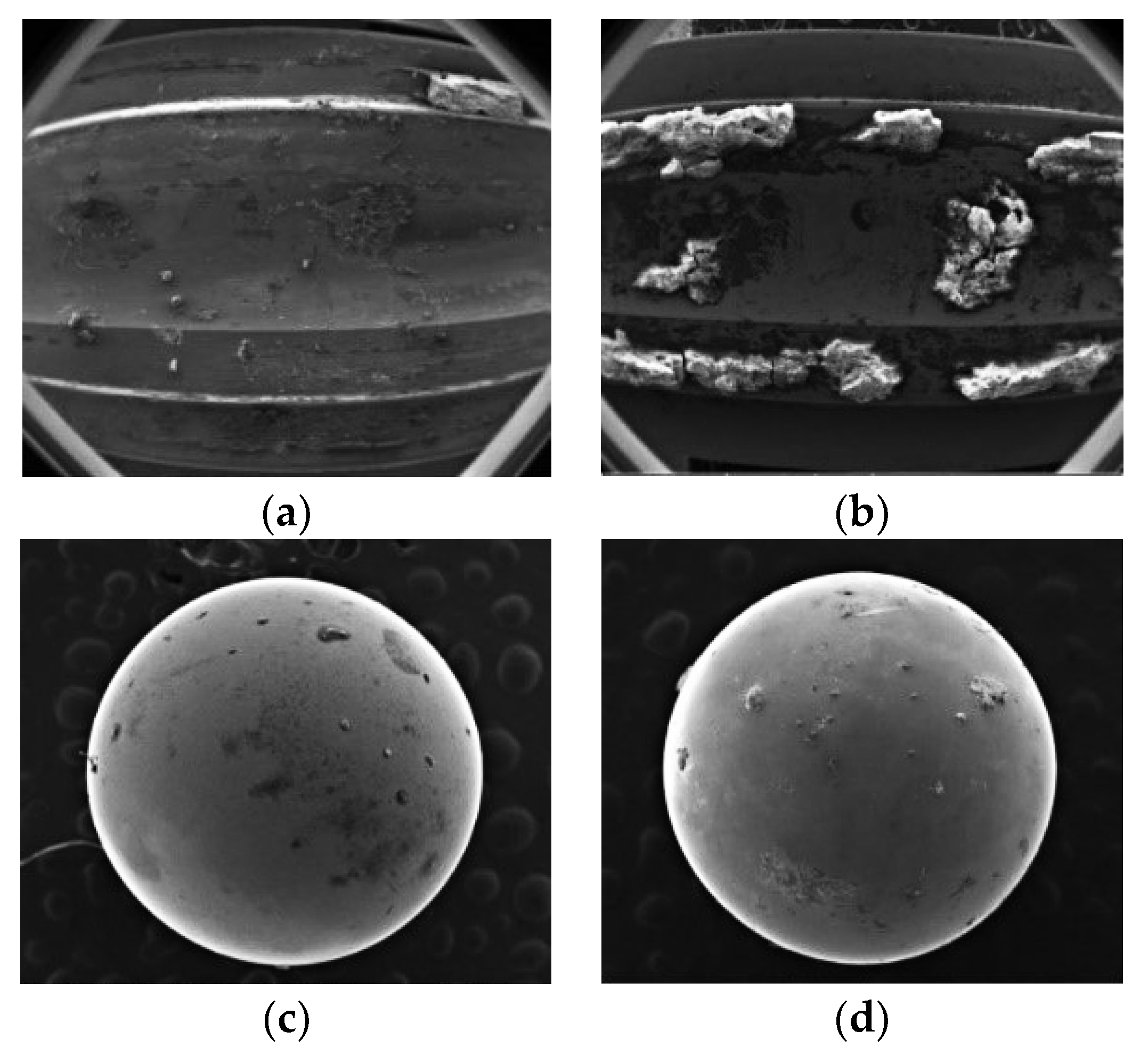
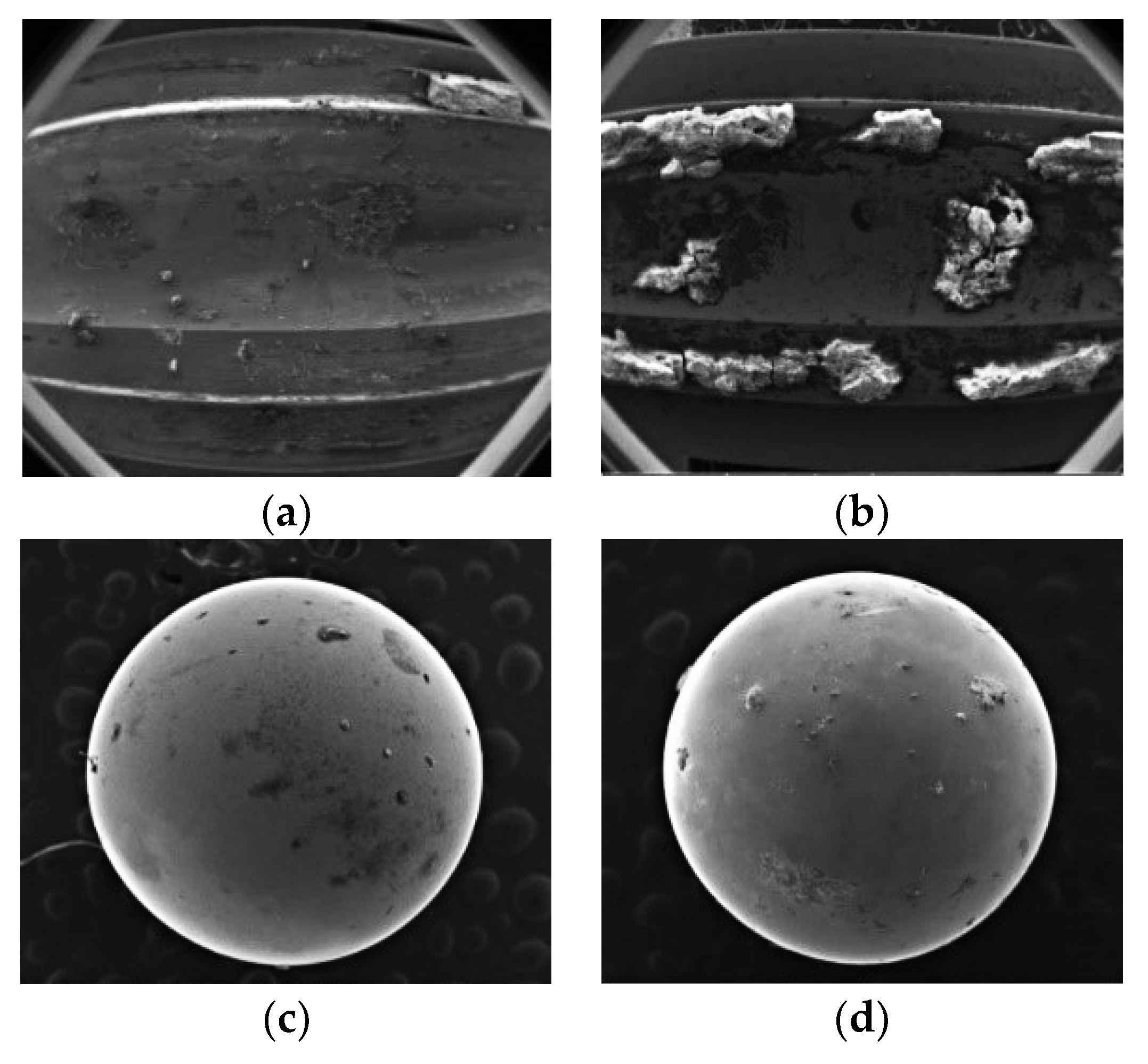
Figure 5, electron microscopy suggested noticeable abrasion on the surfaces of the inner and outer bearing races and bearing balls of the motor sample under test, which indicated that the motor sample under test had failed. Therefore, the motor vibration data acquired during 0–1016 h was taken as the initial input data.
4. Motor Vibration Feature Extraction and Selection
The features of vibrational data acquired during motor operation were extracted from the perspectives of degradation description and life evaluation. In this study, the feature parameter extraction methods included time domain feature parameter extraction method [
22], frequency domain feature parameter extraction method [
23], wavelet packet band energy (WPBE) feature parameter extraction method [
24], and entropy measure-based feature parameter extraction method [
25]. The commonly used time domain feature parameters were mean value, variance (VAR), peak, root mean square (RMS), skewness, kurtosis, pulse, margin, waveform, and peak value; the commonly-used frequency domain feature parameters included gravity frequency (GF), mean-square frequency (MSF), and frequency variance (FV). Entropy-based feature parameters included amplitude spectrum entropy (ASE) and Hilbert marginal spectrum entropy (HMSE).
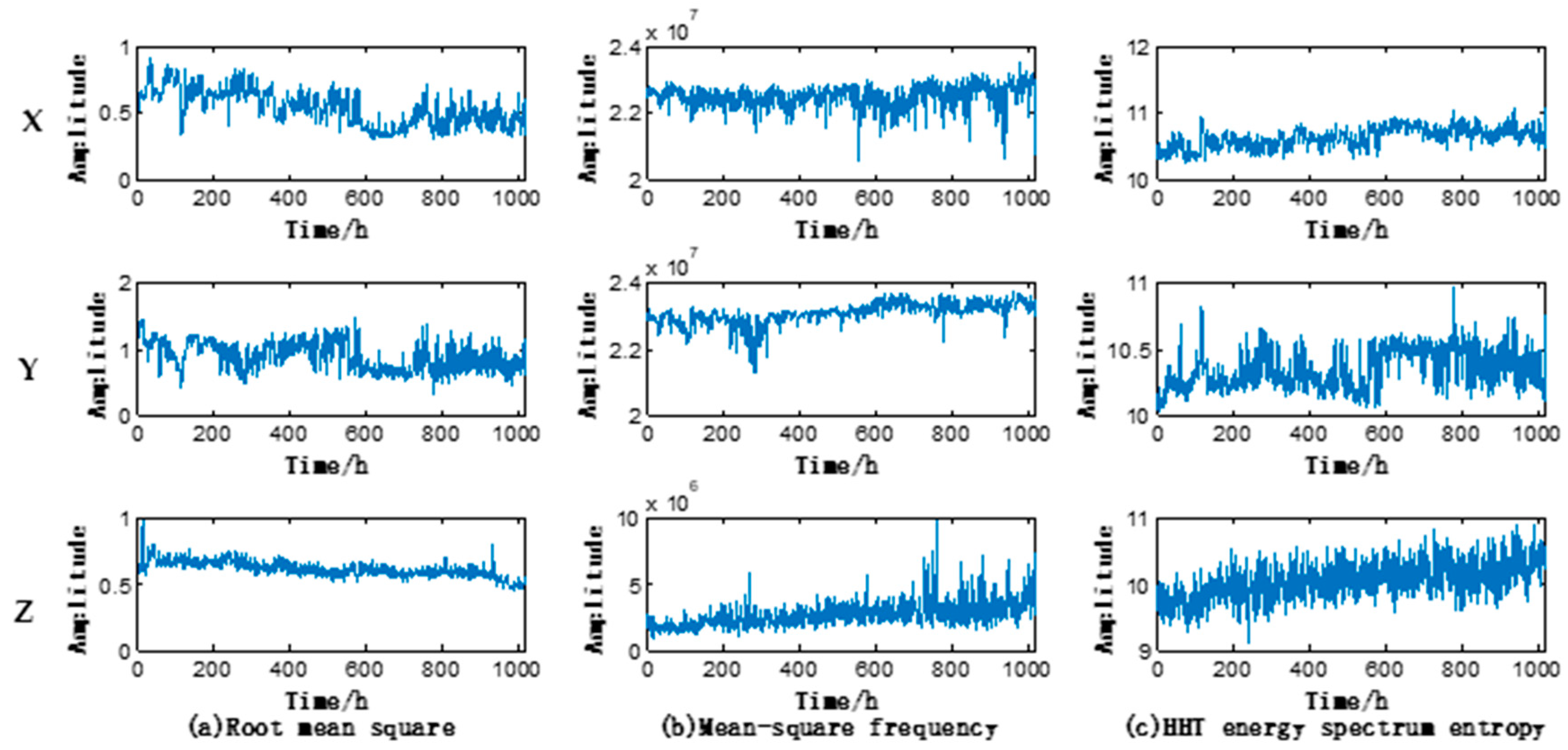
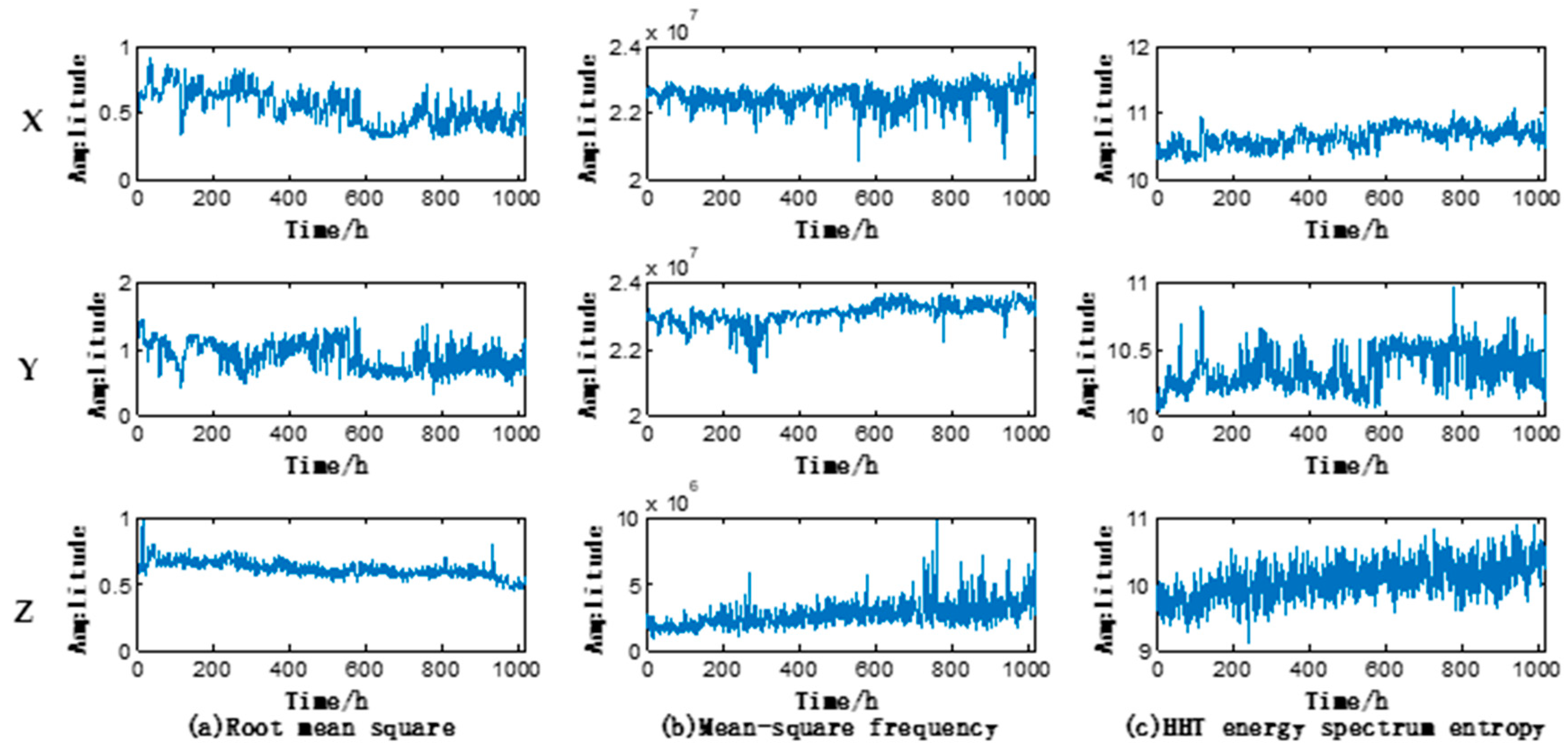
With the aforementioned feature parameter extraction method, the feature parameters of vibration data along
X,
Y, and
Z-axes were extracted, thus obtaining the triaxial 24-dimensional feature parameters. The triaxial operating state features of the motor under test are shown in
Figure 6 (taking RMS, MSF, and Hereditary hemorrhagic telangiectasia (HHT) energy spectrum entropy as an example). It could be seen that the feature parameters along
X,
Y, and
Z axes differ from each other.
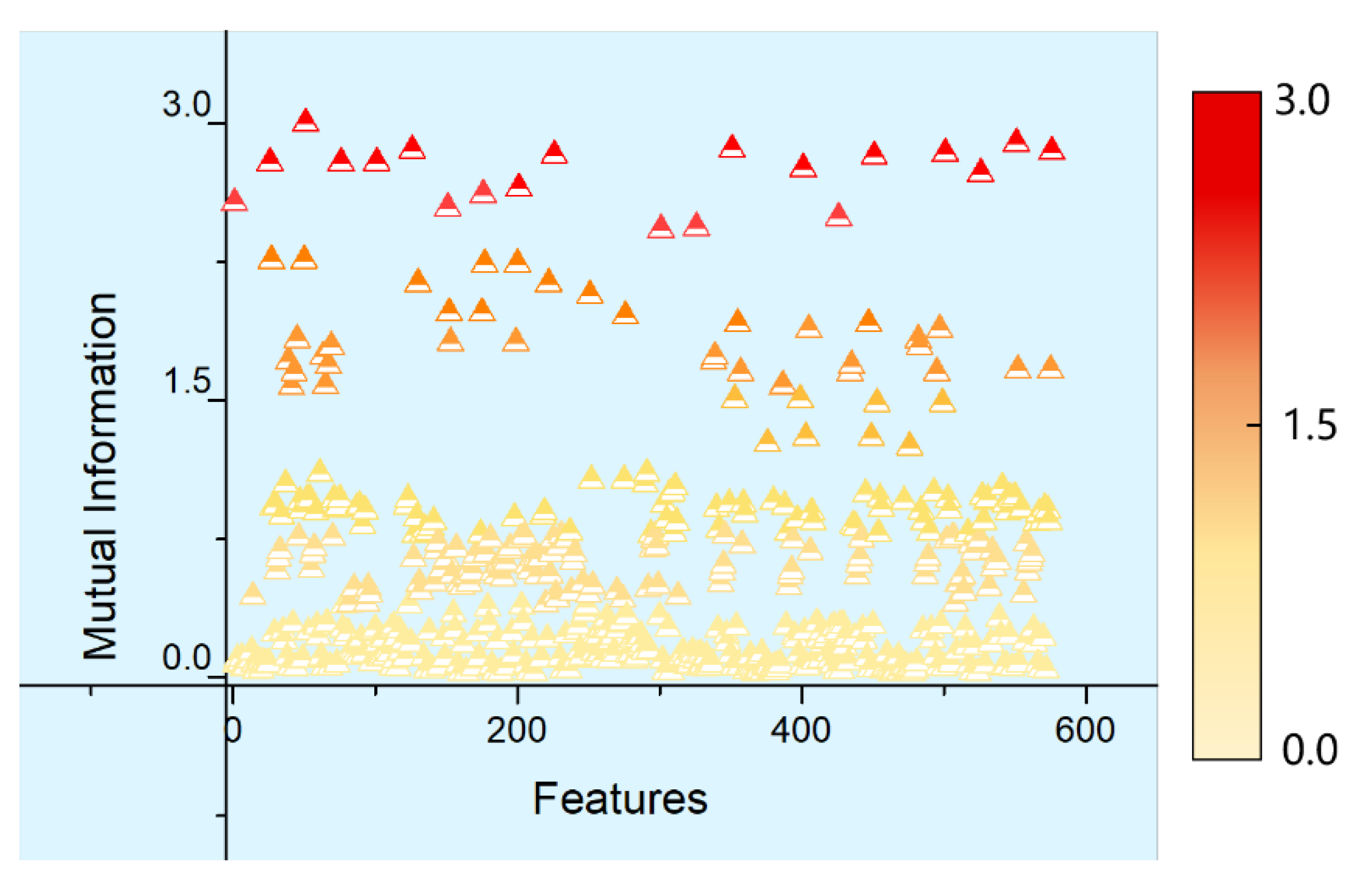
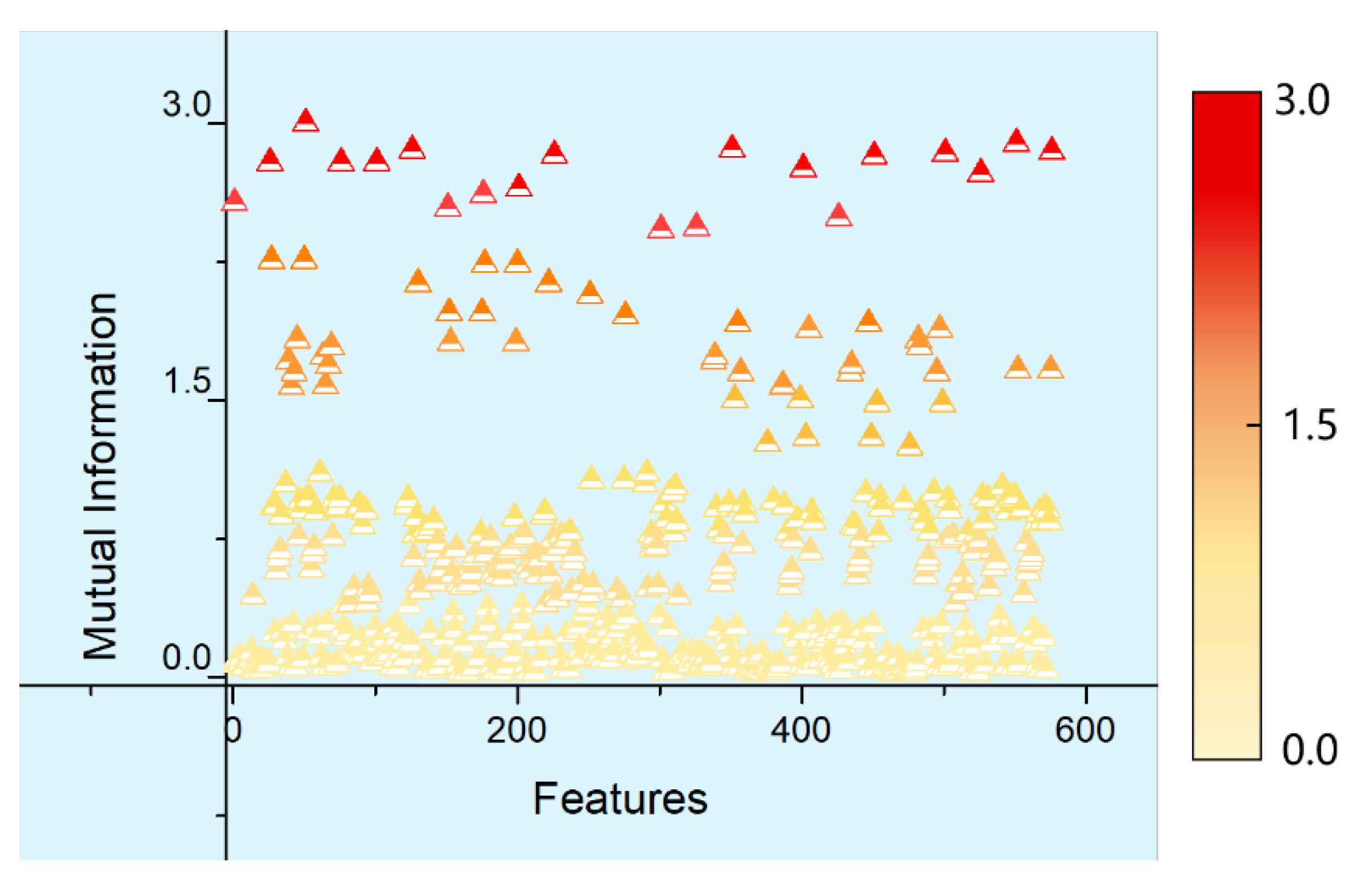
According to the definition of mutual information given in
Section 2.1, the information shared by the feature parameters along
X,
Y, and
Z-axes was measured using the mutual information index. The distribution of mutual information between various feature parameters is shown in
Figure 7 (taking
X-axis as an example), where the horizontal axis means the arbitrary combination of two 24-dimensional feature parameters along the
X-axis. Thus, there are 576 combinations. Each point represents the mutual information between any two feature parameters in the 24-dimensional feature parameter set of the motor along the
X-axis, with its numerical values shown by gradient colors. According to calculations, the mutual information between various feature parameters along the
X-axis was larger than 0 and the numerical value of mutual information between any two feature parameters differed from each other, which indicated that the information between various feature parameters along
X-axis overlapped each other with certain relevance. Similarly, calculations also suggested that the mutual information, with different numerical values, between various feature parameters along
Y and
Z-axes was also larger than 0. This also evidenced that the information between various feature parameters along the
Y and
Z-axes overlapped each other, with certain relevance between them.
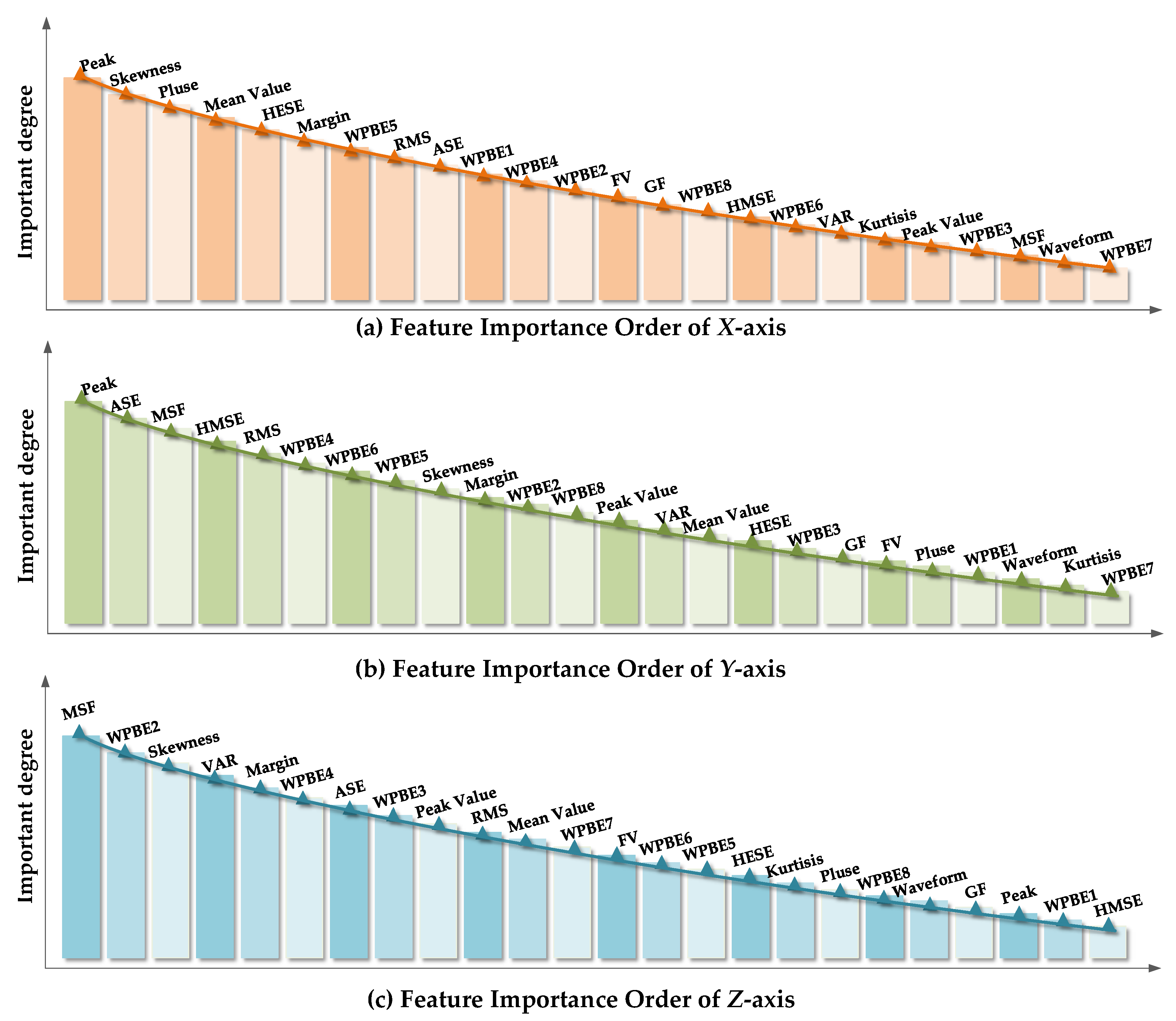
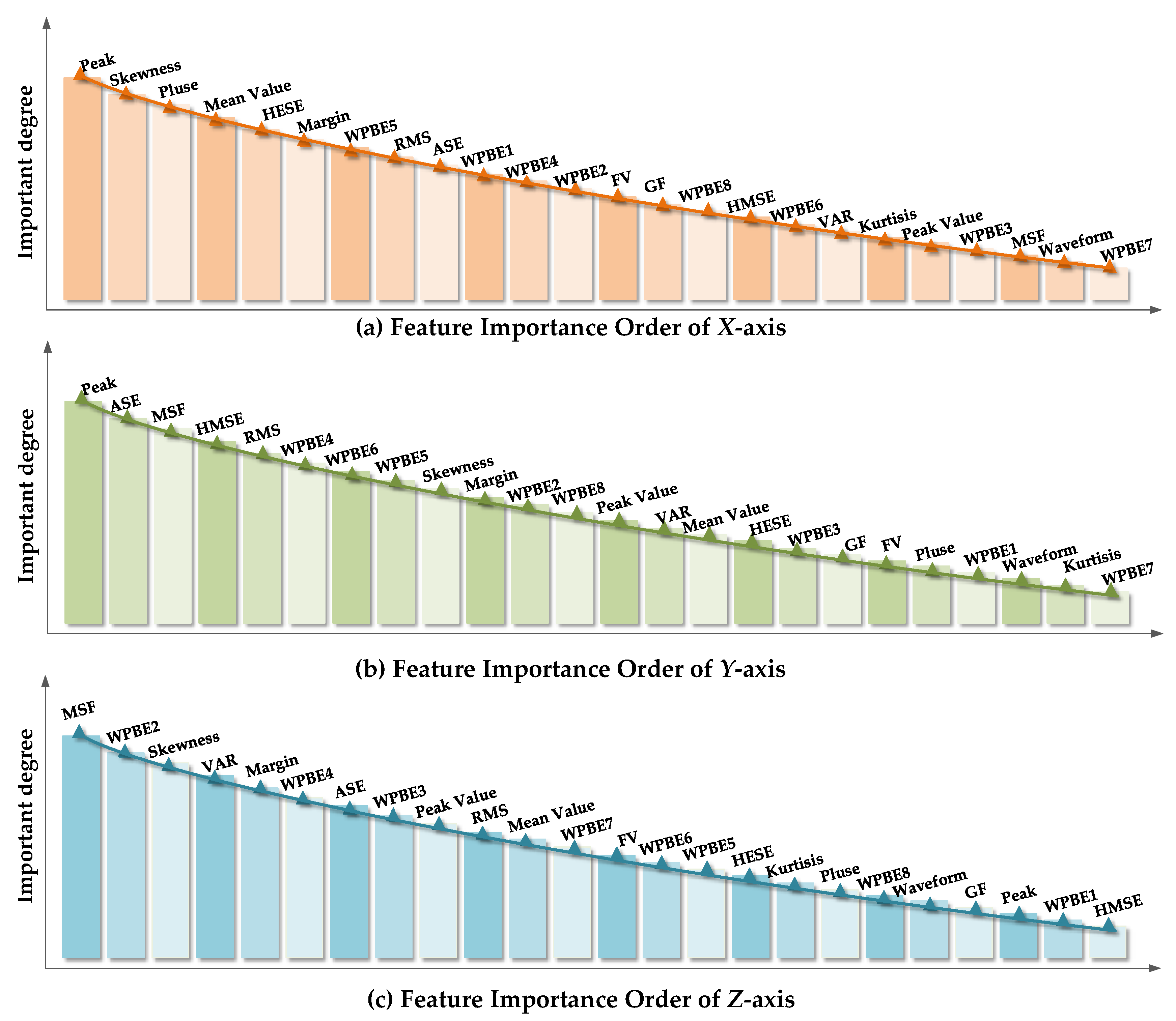
The UFS-MIFD algorithm proposed in
Section 2.2 was used to order the original feature parameter set of the motor under test along
X,
Y, and
Z-axes by importance. The results of the importance ordering of feature parameters along the three axes, namely
GX,
GY, and
GZ, are shown in
Figure 8a–c, respectively.
It can be seen that the peak was the most important feature parameter in the original feature parameter set along the
X and
Y-axes while MSF was the most important feature parameter in the original feature parameter set along the
Y-axis.
Figure 8 also suggests significant differences between various feature parameters in the feature parameter sets along the three axes which reflected the difference between feature parameters along various axes.
The important orders feature parameters of the motor under test along the
X,
Y and
Z-axes, namely
GX,
GY, and
GZ, were evaluated based on the feature parameter subset evaluation criterion mentioned in the Step 4 of
Section 2.2, where the threshold parameter
. Eventually, the feature subset
SX of the
X-axis contained the first 17 feature parameters of
GX. Similarly, the feature subset
SY contained the first 16 feature parameters of
GY; the feature subset
SZ contained the first 13 feature parameters of
GZ, as shown in
Table 2.
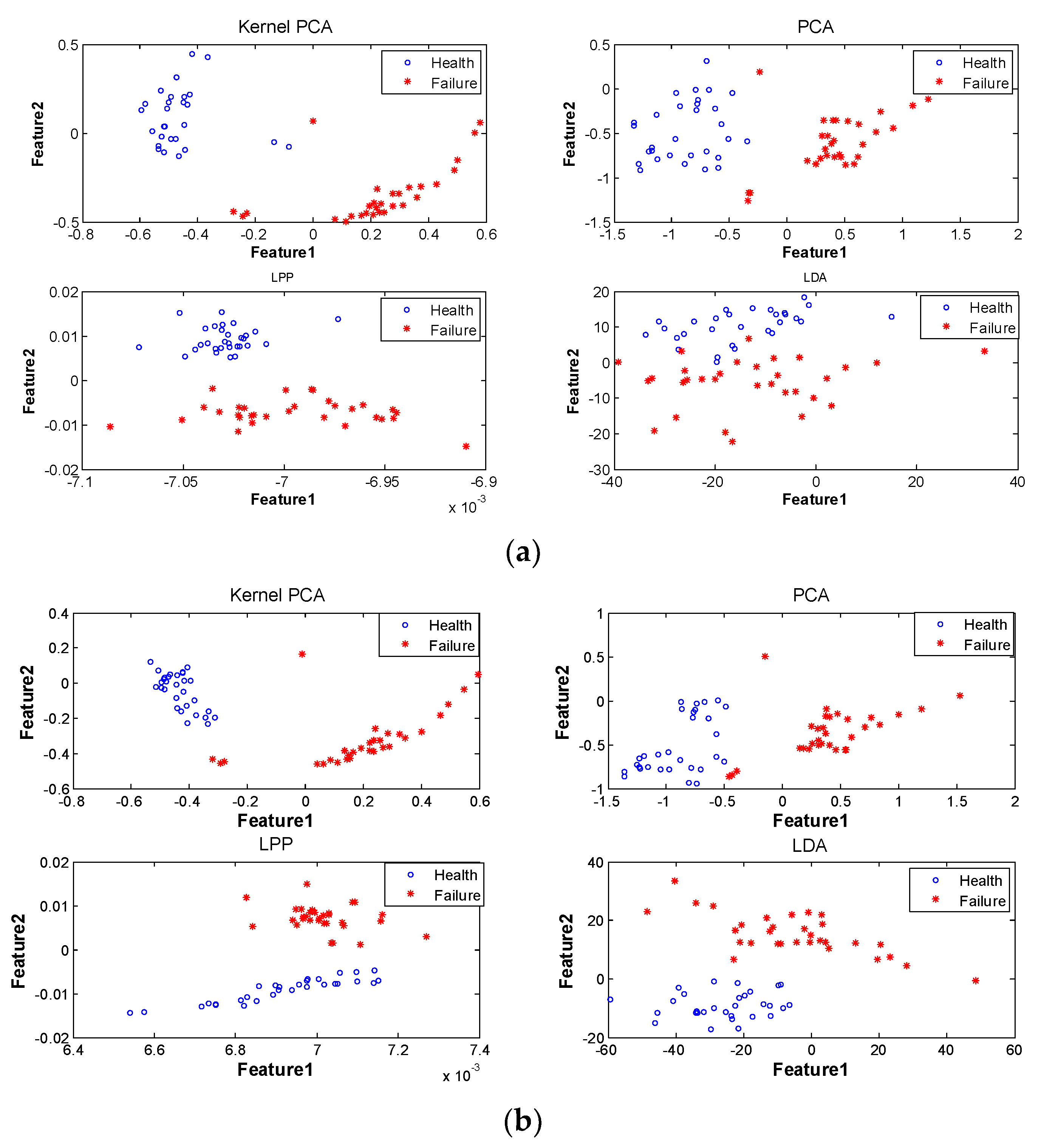
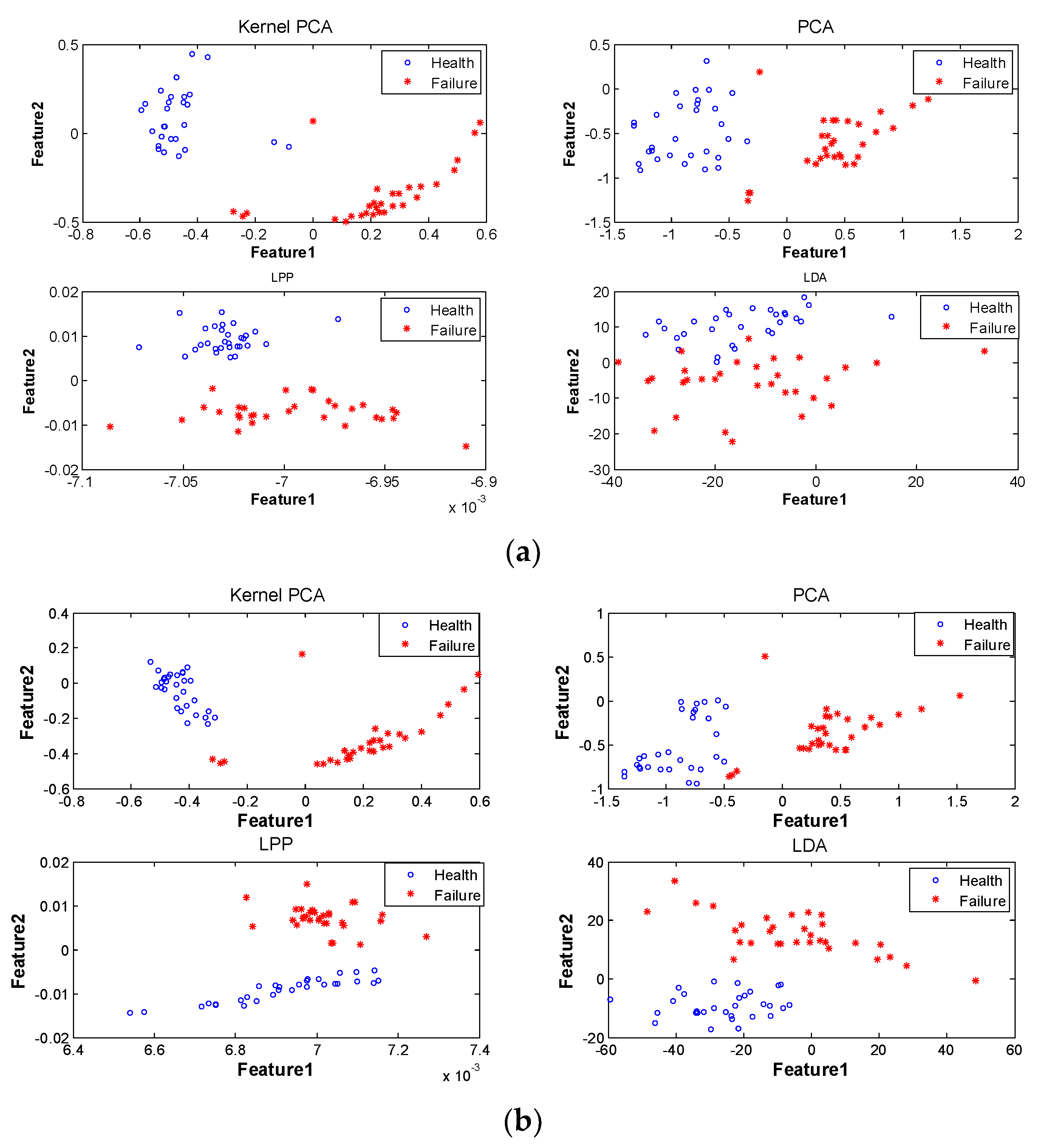
It is generally believed that major feature information can be covered by the first two-dimensional feature parameters fused by the subspace learning method. In this study, the operation state information of the motor under test was fused by the process of feature information fusion based on subspace learning shown in the third part of
Figure 9 using subspace learning methods, such as KPCA [
3], PCA [
2], LPP [
5], and LDA [
4]. Thus, the two-dimensional integrated feature parameters of the motor operating states were obtained. The final fusion result is shown in
Figure 9. It could be seen that the motor operating degradation paths described by KPCA, PCA, and LPP fluctuated less than that by LDA, which evidenced that the KPCA, PCA, and LPP performed better in describing the motor operating state than LDA.
6. Conclusions
To overcome the information fusion performance decline of subspace learning algorithms caused by the redundant and irrelevant features in the multidimensional feature parameter set, the mutual information and fractal dimension-based unsupervised feature selection algorithm is studied. A UFS-MIFD method is proposed using various theories and methods, including original feature extraction method, mutual information, and fractal theory, in response to the long computing time, high time complexity, and the possibility of failing to identify the optimal solutions that plague previous unsupervised feature selection algorithms. With this method, a feature importance ordering algorithm that takes the relevance and redundancy of features into overall consideration is developed. The optimal feature subset is identified by eliminating the highly-redundant feature parameters with low relevance to the whole feature parameter set based on the fractal dimension-based feature subset evaluation criterion. In addition, a performance degradation test of brushless DC motor of multi-rotor UAV is designed to verify the proposed method based on the vibration signal data. To verify the proposed UFS-MIFD, the information fusion performance of subspace learning algorithms before and after the use of UFS-MIFD is compared by measuring the motor health-fault diagnosis capacity and motor state prediction effect. Comparison results suggest that UFS-MIFD can play a role in enhancing the information fusion performance of subspace learning methods. Not only is the proposed method able to reduce the negative influence of irrelevant and redundant features and excessive dimension on subsequent algorithms and decisions and enhance the precision and stability of subsequent research results, but it is also of high engineering value since it can be used for the feature selection of large volumes of unlabeled data. With limited data of the motor under test, however, there is still room for the improvement and optimization of the proposed method with the increase of test subjects and sample size. Moreover, because the application of the proposed method in this paper is specific, the proposed method can be applied to the feature selection of vibration signals of similar UAVs’ operating systems. In other words, it is not clear if the behavior of the proposed method will be the same for different types of signals of other applications. Therefore, the adaptability and universality of the proposed method will be further discussed and investigated in the following research.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}