
Projective Synchronization of Chaotic Discrete Dynamical Systems via Linear State Error Feedback Control



Abstract
:1. Introduction
2. A Novel Discrete Dynamical System and 0–1 Test for Chaos
2.1. A Novel 3-D Discrete Dynamical System
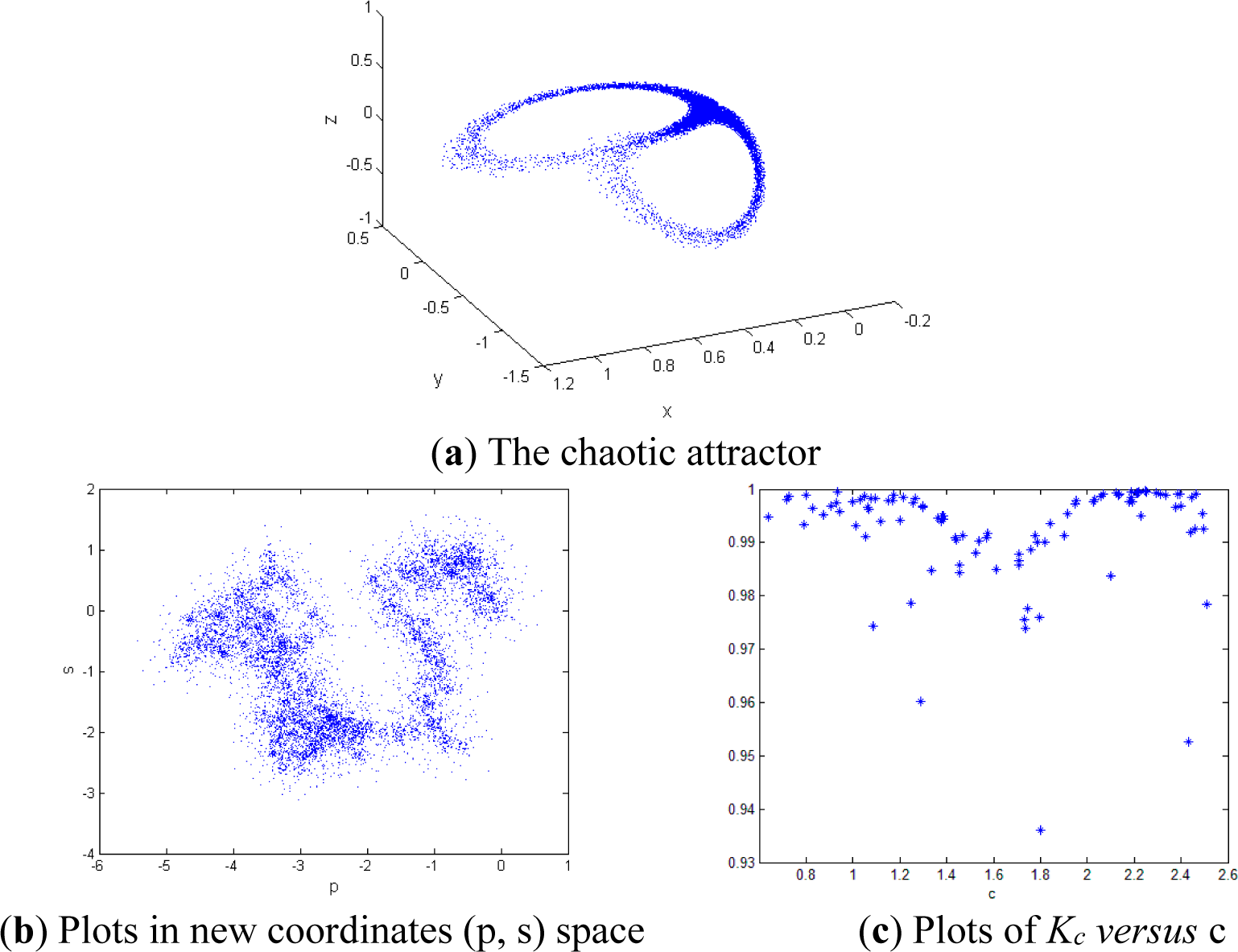
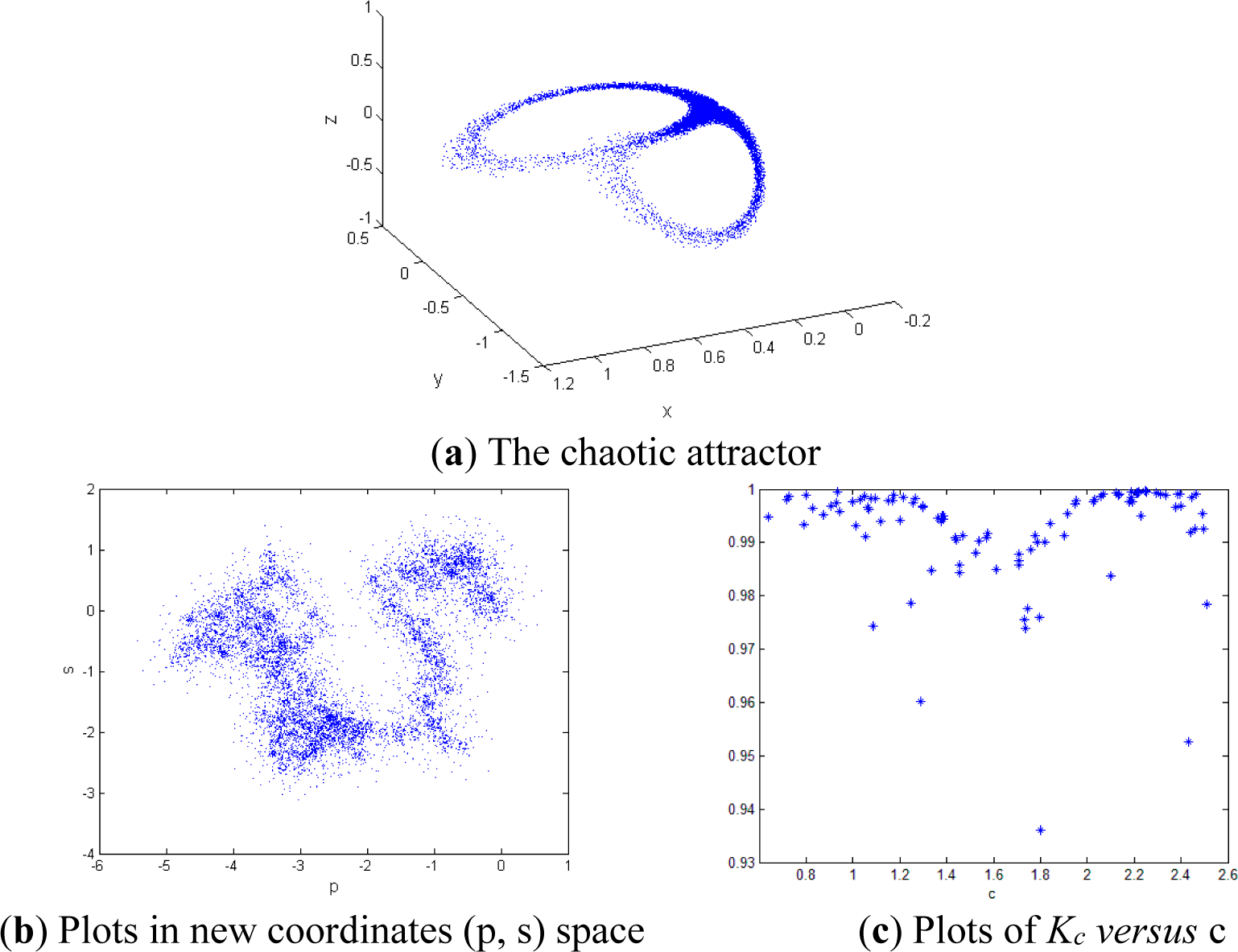
2.2. 0–1 Test Algorithm for Chaos
- Step 1. Determine a random number c ∈ (π/5, 4π/5), and construct a pair of new coordinates (pc (n), sc (n)) as follows:Where:
- Step 2. Define the mean square displacement Mc (n) as follows:
- Step 3. Define the modified mean square displacement Dc (n) as follows:
- Step 4. Define the median value of correlation coefficient as follows:where:where ξ = (1, 2, ⋯, ncut) Δ = (Dc(1), Dc(2), ⋯, Dc(ncut)), ncut = round (N/10), and the covariance and variance are defined with vectors x, y of length q as follows:
- Step 5. Interpret the outputs as follows:
- K ≈ 0 implies that the underlying dynamics is regular (i.e., periodic or quasi-periodic), whereas K ≈1 implies that the underlying dynamics is chaotic;
- Bounded trajectories in the (p, s)-plane indicate that the underlying dynamics is regular, whereas the Brownian-like (unbounded) trajectories indicate that the underlying dynamics is chaotic.
3. A Synchronization Scheme of n-Dimensional Chaotic Discrete Dynamical Systems
4. Application to the Novel Discrete Dynamical System
- Case 1:For the first control law in Proposition 1, substituting Equation (18a) into the error system (19), one can get the following error system:which has only one equilibrium point at E* = (0,0,0). Evaluating its Jacobian matrix at E*, one can get the upper triangular matrix as follows:whose eigenvalues simultaneously satisfy λ1 = |h1| <1, λ2 = |h2 + ĉ| <1 and λ3 = |h3 – d| <1.
- Case 2:For the second control law in Proposition 1, substituting Equation (18b) into the error system (20), the system (20) can be re-depicted as follows:which has only one equilibrium point at E* = (0,0,0). Evaluating its Jacobian matrix at E*, one can get the lower triangular matrix as follows:whose eigenvalues can also satisfy λ1 = |h1| <1, λ2 = |h2 + ĉ| <1 and λ3 = |h3 – d| <1. simultaneously.
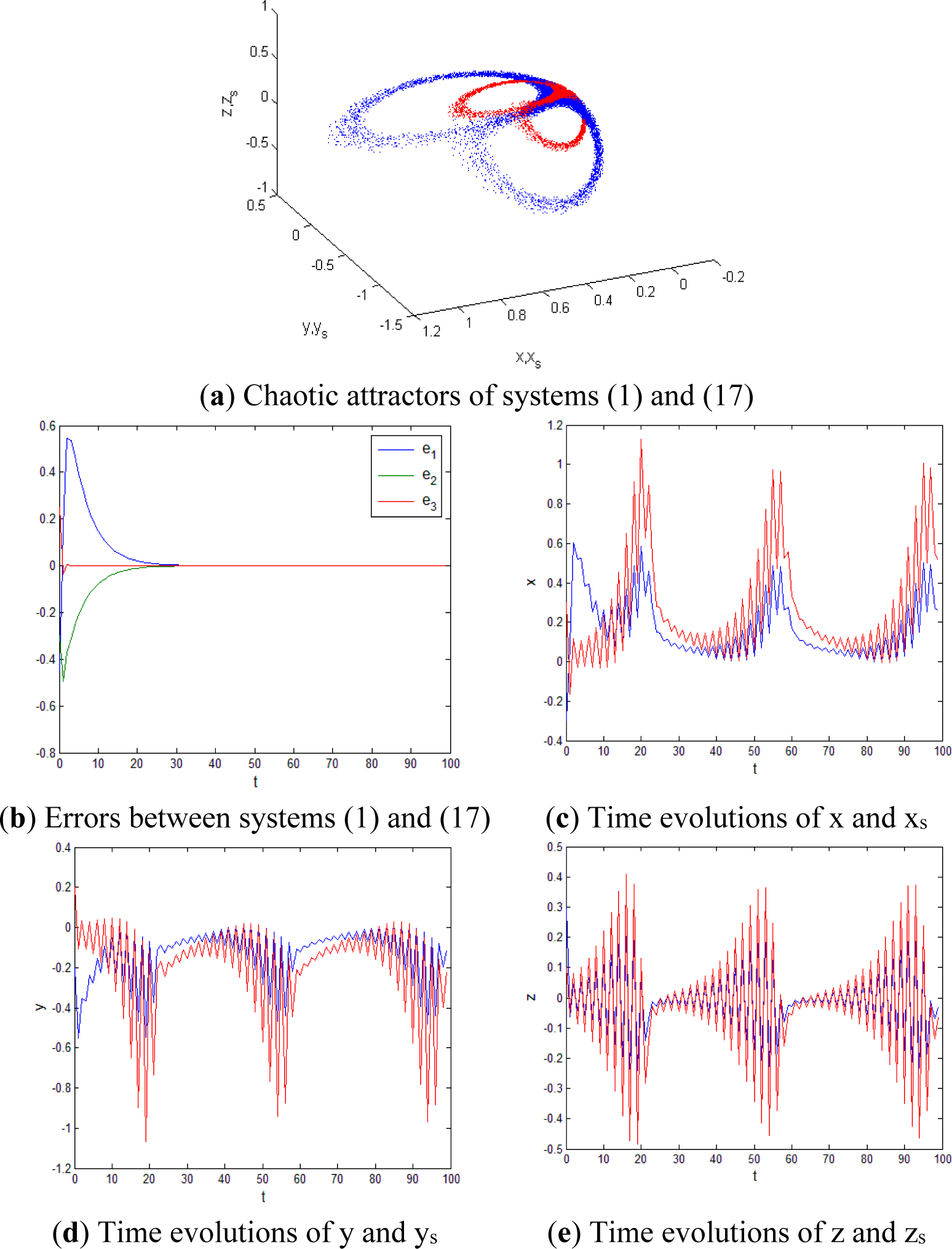
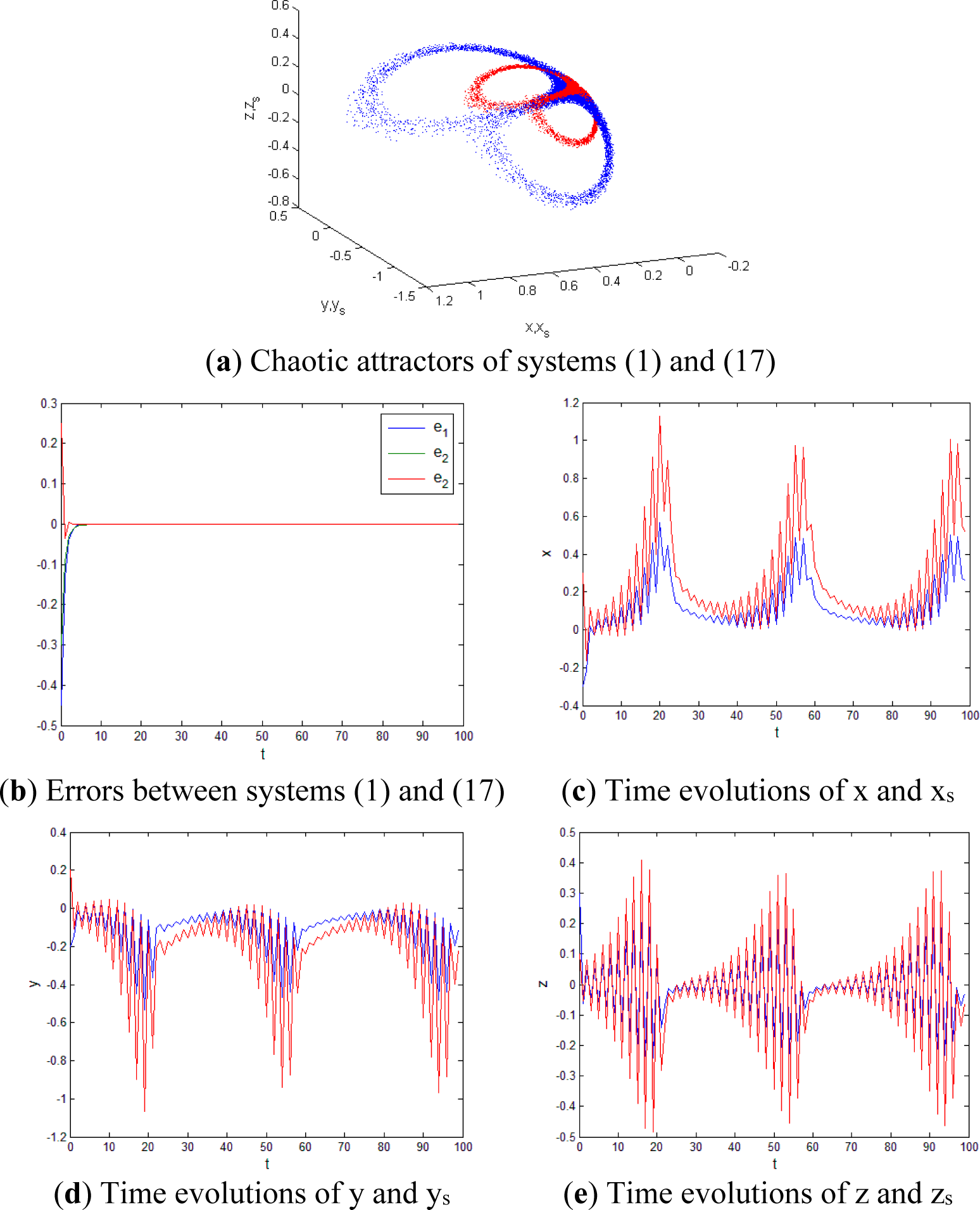
5. Numerical Simulations
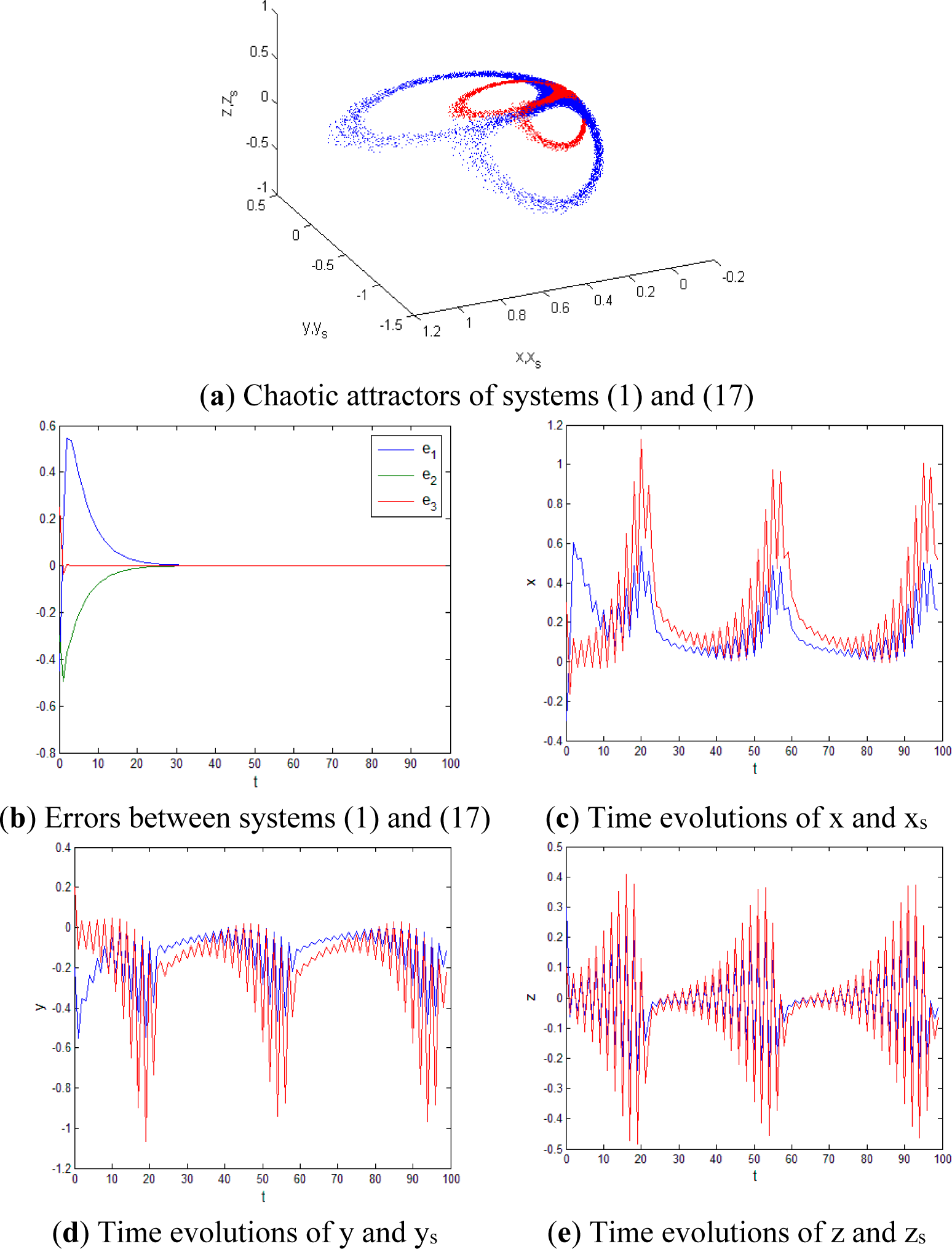
5.1. The first Control Law (Equation (18a))
5.2. The Second Control Law (Equation (18b))
6. Conclusions
- The proposed 3-dimensional chaotic discrete dynamical system (1) is enough to validate the main results of this work, and should be studied additional interesting topics in the future, and can play more roles.
- The proposed projective synchronization scheme via linear feedback control technique is really easy and robust to be implemented efficiently.
- Considering the advantage that the linear controller is easier to be designed than other controllers, the proposed synchronization will be offered a great application potential, such as secure communications, information storage, message identification, and other kinds of coordination activities of interacting chaotic systems in living systems.
- It should be a quite interesting work to expand aforementioned results to study the anti-synchronization [27] of the discrete chaotic dynamic systems by using the linear state error feedback control.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kinzel, W.; Englert, A.; Kanter, I. On chaos synchronization and secure communication. Phil. Trans. R. Soc. A 2010, 368, 379–389. [Google Scholar]
- Xin, B.; Chen, T.; Liu, Y. Projective synchronization of chaotic fractional-order energy resources demand–supply systems via linear control. Commun. Nonlinear Sci. Numer. Simul 2011, 16, 4479–4486. [Google Scholar]
- Xin, B.; Chen, T.; Liu, Y. Synchronization of chaotic fractional-order WINDMI systems via linear state error feedback control. Math. Probl. Eng 2010, 2010. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, M.; Cai, X. Synchronization of a novel hyperchaotic complex-variable system based on finite-time stability theory. Entropy 2013, 15, 4334–4344. [Google Scholar]
- Li, L.; Jian, J. Finite-time synchronization of chaotic complex networks with stochastic disturbance. Entropy 2015, 17, 29–51. [Google Scholar]
- Chen, L.; Qu, J.; Chai, Y.; Wu, R.; Qi, G. Synchronization of a class of fractional-order chaotic neural networks. Entropy 2013, 15, 3265–3276. [Google Scholar]
- Fujisaka, H.; Yamada, T. Stability theory of synchronized motion in coupled-oscillator systems. Prog. Theor. Phys 1983, 69, 32–47. [Google Scholar]
- Pecora, L.; Carroll, T. Synchronization in chaotic systems. Phys. Rev. Lett 1990, 64, 821. [Google Scholar]
- Mainieri, R.; Rehacek, J. Projective synchronization in three-dimensional chaotic systems. Phys. Rev. Lett 1999, 82, 3042–3045. [Google Scholar]
- Wen, G.; Xu, D. Observer-based control for full-state projective synchronization of a general class of chaotic maps in any dimension. Phys. Lett. A 2004, 333, 420–425. [Google Scholar]
- Wen, G.; Xu, D. Nonlinear observer control for full-state projective synchronization in chaotic continuous-time systems. Chaos Solitons Fractals 2005, 26, 71–77. [Google Scholar]
- Wen, G.; Lu, Y.; Zhang, Z.; Ma, C.; Yin, H.; Cui, Z. Line spectra reduction and vibration isolation via modified projective synchronization for acoustic stealth of submarines. J. Sound Vib 2009, 324, 954–961. [Google Scholar]
- Wen, G.; Zhang, Z.; Yao, S.; Yin, H.; Chen, Z.; Xu, H.; Ma, C. Vibration control for active seat suspension system based on projective chaos synchronisation. Int. J. Veh. Des 2012, 58, 1–14. [Google Scholar]
- Wen, G. Designing Hopf limit circle to dynamical systems via modified projective synchronization. Nonlinear Dyn 2011, 63, 387–393. [Google Scholar]
- Xie, H.; Wen, G. Designing torus-doubling solutions to discrete time systems by hybrid projective synchronization. Commun. Nonlinear Sci. Numer. Simul 2013, 18, 3167–3173. [Google Scholar]
- Yin, L.; Yong, C.; Biao, L. Adaptive control and function projective synchronization in 2D discrete-time chaotic systems. Commun. Theor. Phys 2009, 51, 270–278. [Google Scholar]
- Vasegh, N.; Majd, V. Adaptive fuzzy synchronization of discrete-time chaotic systems. Chaos Solitons Fractals 2006, 28, 1029–1036. [Google Scholar]
- Zhang, L.; Jiang, H.; Bi, Q. Reliable impulsive lag synchronization for a class of nonlinear discrete chaotic systems. Nonlinear Dyn 2010, 59, 529–534. [Google Scholar]
- Zhang, L.; Liu, X. The synchronization between two discrete-time chaotic systems using active robust model predictive control. Nonlinear Dyn 2013, 74, 905–910. [Google Scholar]
- Odibat, Z.; Corson, N.; Aziz-Alaoui, M.; Bertelle, C. Synchronization of chaotic fractional-order systems via linear control. Int. J. Bifurc. Chaos 2010, 20, 81–97. [Google Scholar]
- Chen, D.; Shi, L.; Chen, H.; Ma, X. Analysis and control of a hyperchaotic system with only one nonlinear term. Nonlinear Dyn 2012, 67, 1745–1752. [Google Scholar]
- Chen, D.; Zhang, R.; Sprott, J.; Ma, X. Synchronization between integer-order chaotic systems and a class of fractional-order chaotic system based on fuzzy sliding mode control. Nonlinear Dyn 2012, 70, 1549–1561. [Google Scholar]
- Xin, B.; Chen, T. Projective synchronization of N-dimensional chaotic fractional-order systems via linear state error feedback control. Discrete Dyn. Nat. Soc 2012, 2012. [Google Scholar] [CrossRef]
- Gottwald, G.; Melbourne, I. On the implementation of the 0-1 test for chaos. SIAM J. Appl. Dyn. Sys 2009, 8, 129–145. [Google Scholar]
- Gottwald, G.; Melbourne, I. On the validity of the 0-1 test for chaos. Nonlinearity 2009, 22, 1367–1382. [Google Scholar]
- Xin, B.; Li, Y. Bifurcation and Chaos in a Price Game of Irrigation Water in a Coastal Irrigation District. Discrete Dyn. Nat. Soc 2013, 2013. [Google Scholar] [CrossRef]
- Chen, D.; Zhao, W.; Sprott, J.; Ma, X. Application of Takagi–Sugeno fuzzy model to a class of chaotic synchronization and anti-synchronization. Nonlinear Dyn 2013, 73, 1495–1505. [Google Scholar]
{kind=link}
{kind=link}
{kind=link}
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, B.; Wu, Z. Projective Synchronization of Chaotic Discrete Dynamical Systems via Linear State Error Feedback Control. Entropy 2015, 17, 2677-2687. https://doi.org/10.3390/e17052677
Xin B, Wu Z. Projective Synchronization of Chaotic Discrete Dynamical Systems via Linear State Error Feedback Control. Entropy. 2015; 17(5):2677-2687. https://doi.org/10.3390/e17052677
Chicago/Turabian StyleXin, Baogui, and Zhiheng Wu. 2015. "Projective Synchronization of Chaotic Discrete Dynamical Systems via Linear State Error Feedback Control" Entropy 17, no. 5: 2677-2687. https://doi.org/10.3390/e17052677
APA StyleXin, B., & Wu, Z. (2015). Projective Synchronization of Chaotic Discrete Dynamical Systems via Linear State Error Feedback Control. Entropy, 17(5), 2677-2687. https://doi.org/10.3390/e17052677