Generation and Nonlinear Dynamical Analyses of Fractional-Order Memristor-Based Lorenz Systems

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Preliminaries
2.1. Grünwald-Letnikov Fractional Derivative
2.2. Memristor Model
3. Fractional-Order Memristor-Based Lorenz Systems
3.1. Fractional-Order Lorenz System with the Flux-Controlled Memristor Characterized by a Piecewise Linear Function
3.1.1. Bifurcation Analysis
3.1.2. The Largest Lyapunov Exponent, Phase Portrait and Power Spectrum Analysis
3.2. Fractional-Order Lorenz System with the Flux-Controlled Memristor Characterized by a Quadratic Nonlinearity
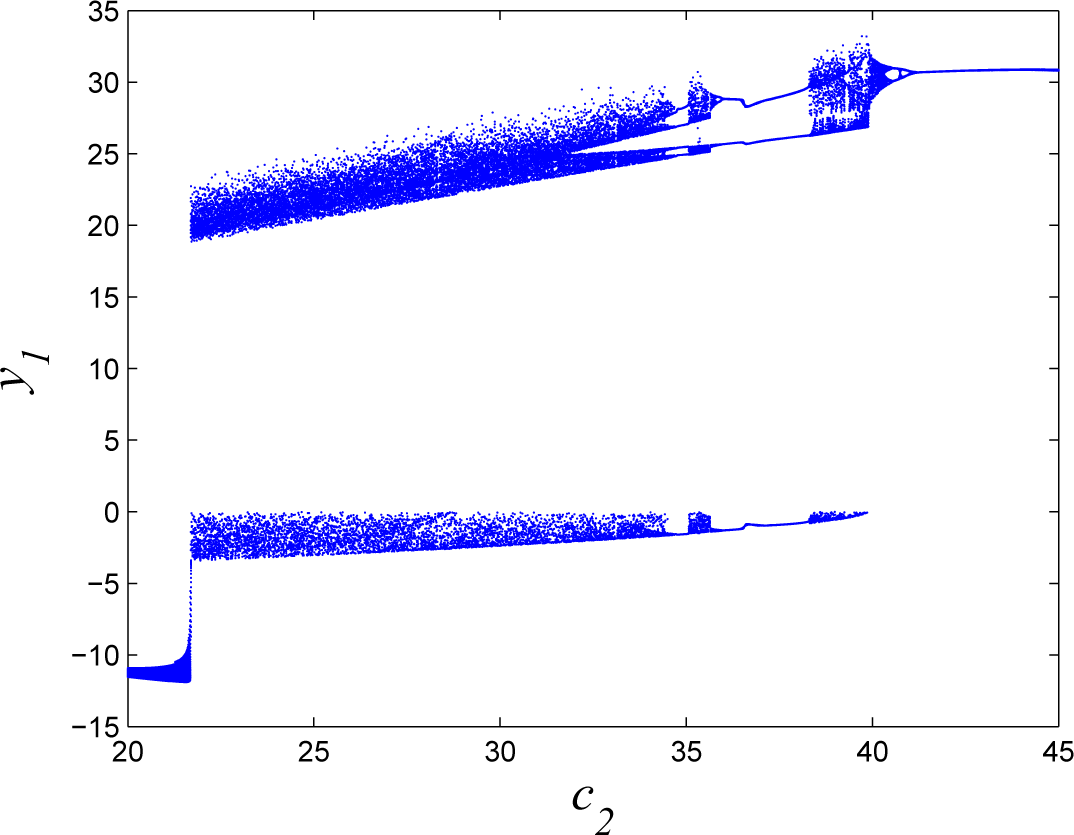
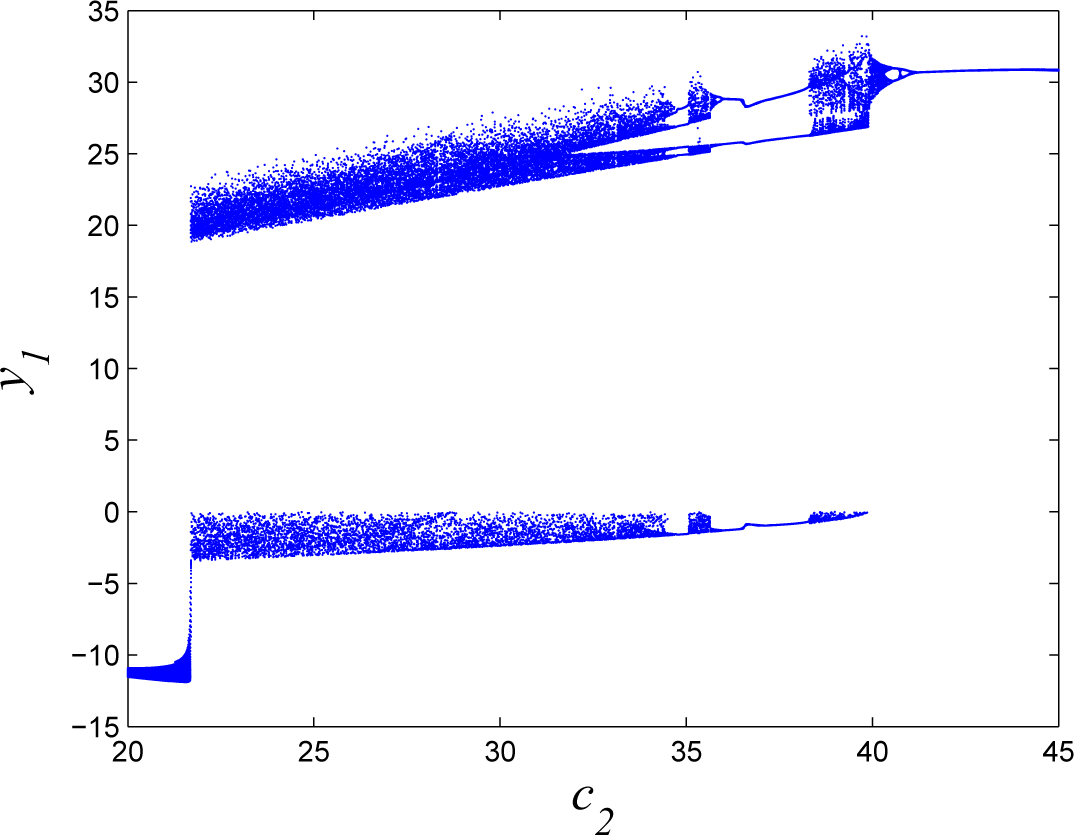
3.2.1. Bifurcation Analysis
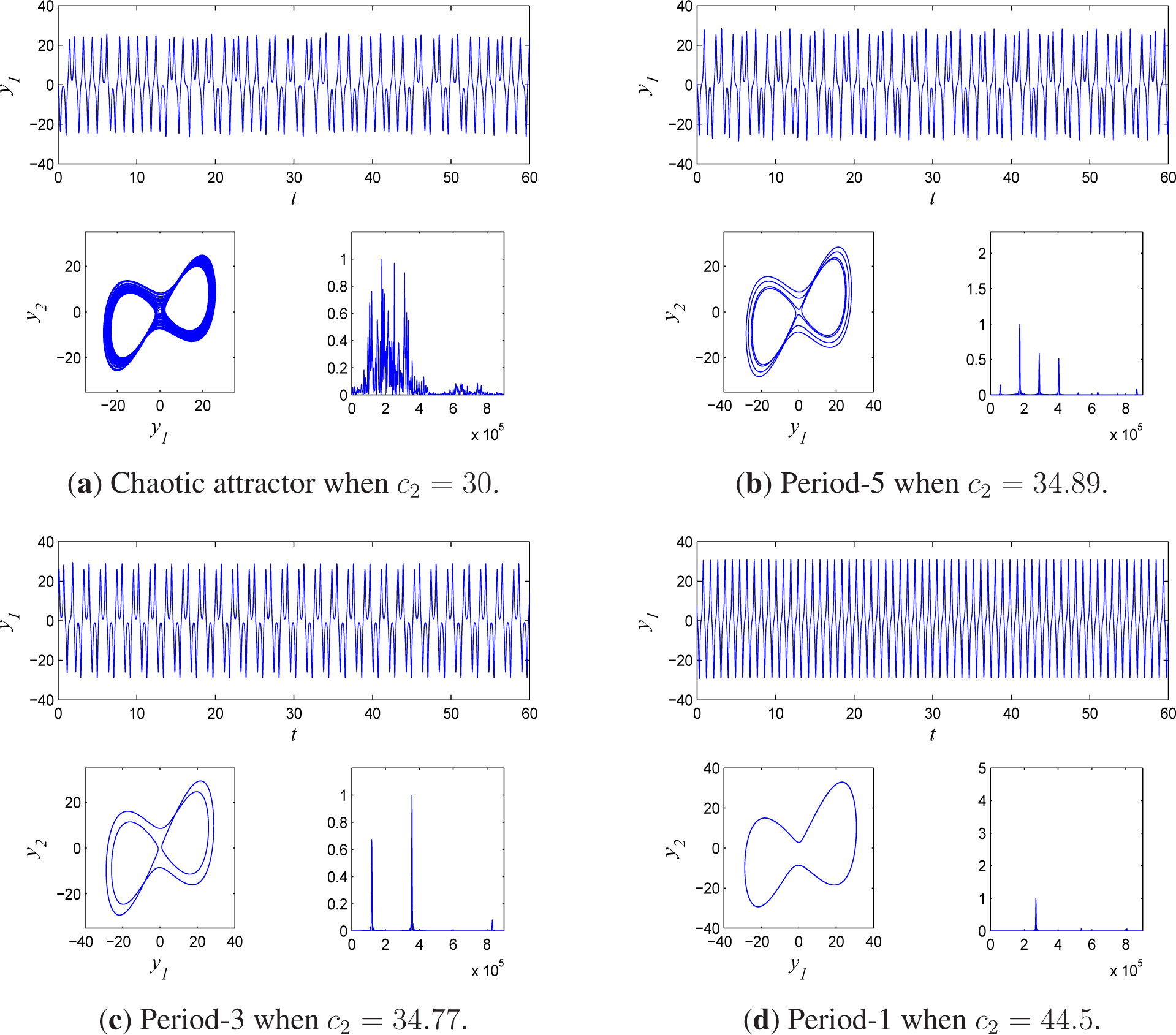
- System (8) undergoes the bifurcation from a stable focus to an unstable focus when c2 ∊ [20, 21.641];
- The first inverse period-doubling bifurcation from chaos beginning at c2 = 21.642 to the period-5 orbit when c2 ∊ [34.59, 35.06]; the second inverse period-doubling bifurcation from chaos beginning at c2 = 35.07 to the period-3 orbit when c2 ∊ [35.96, 38.3]; the third inverse period-doubling bifurcation from chaos beginning at c2 = 38.31 to the period-1 orbit when c2 ∊ [41.22, 45];
- The occurrence of intermittent chaos.
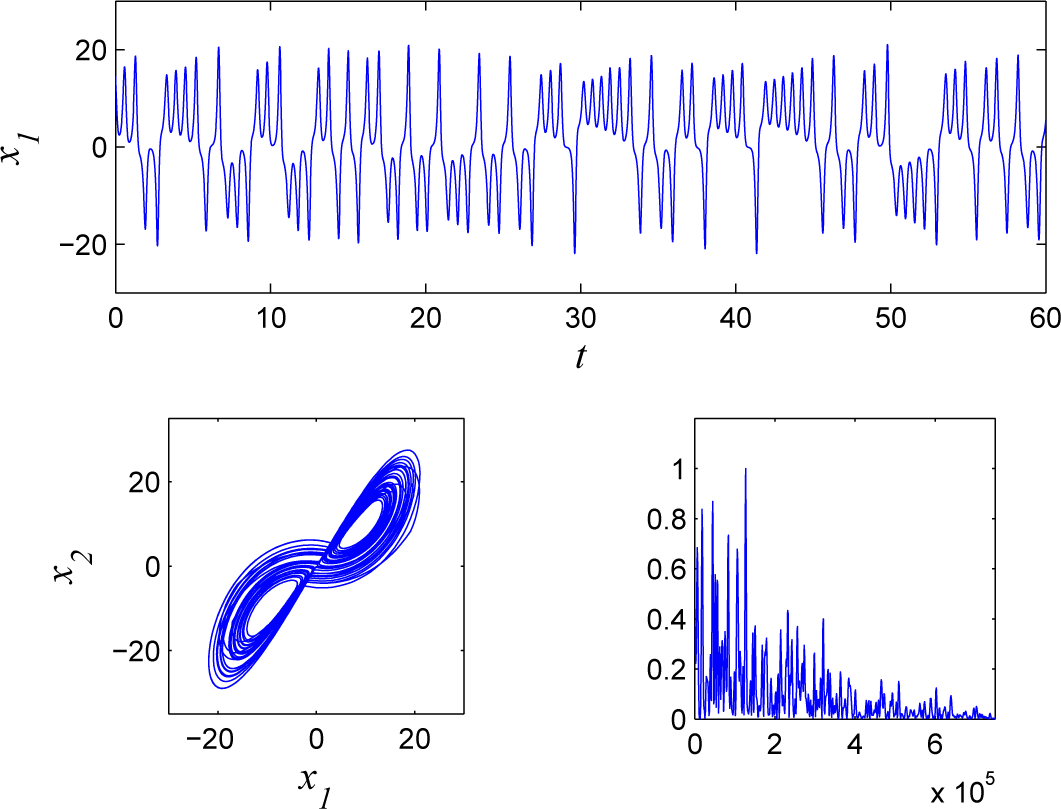
3.2.2. The Largest Lyapunov Exponent, Phase Portraits and Power Spectrum Analysis
3.3. Fractional-Order Lorenz System with the Flux-Controlled Memristor Characterized by a Smooth Continuous Cubic Nonlinearity
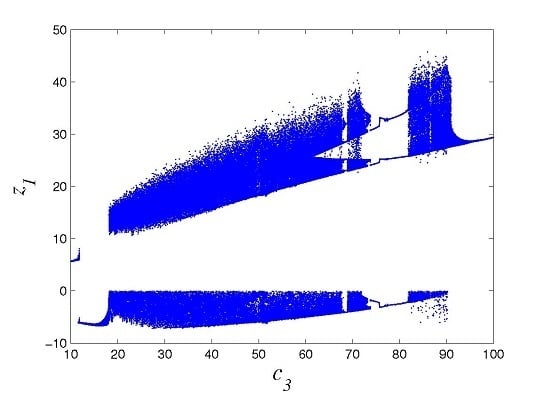
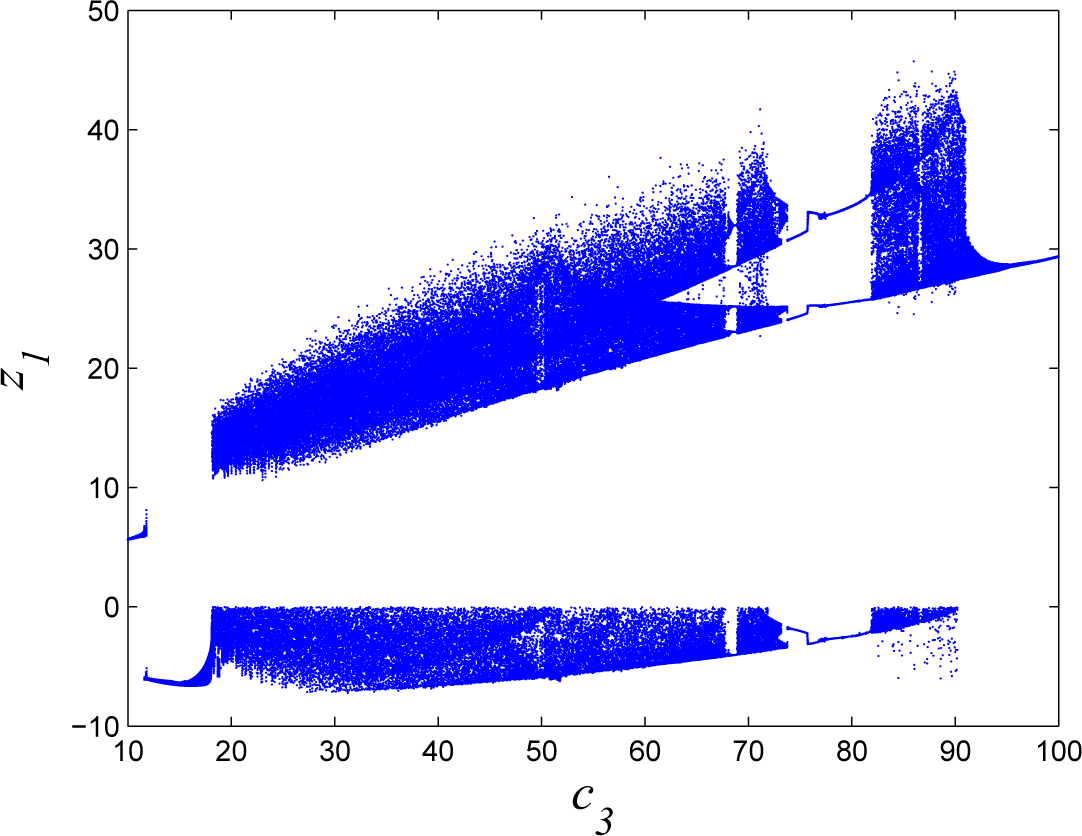
3.3.1. Bifurcation Analysis
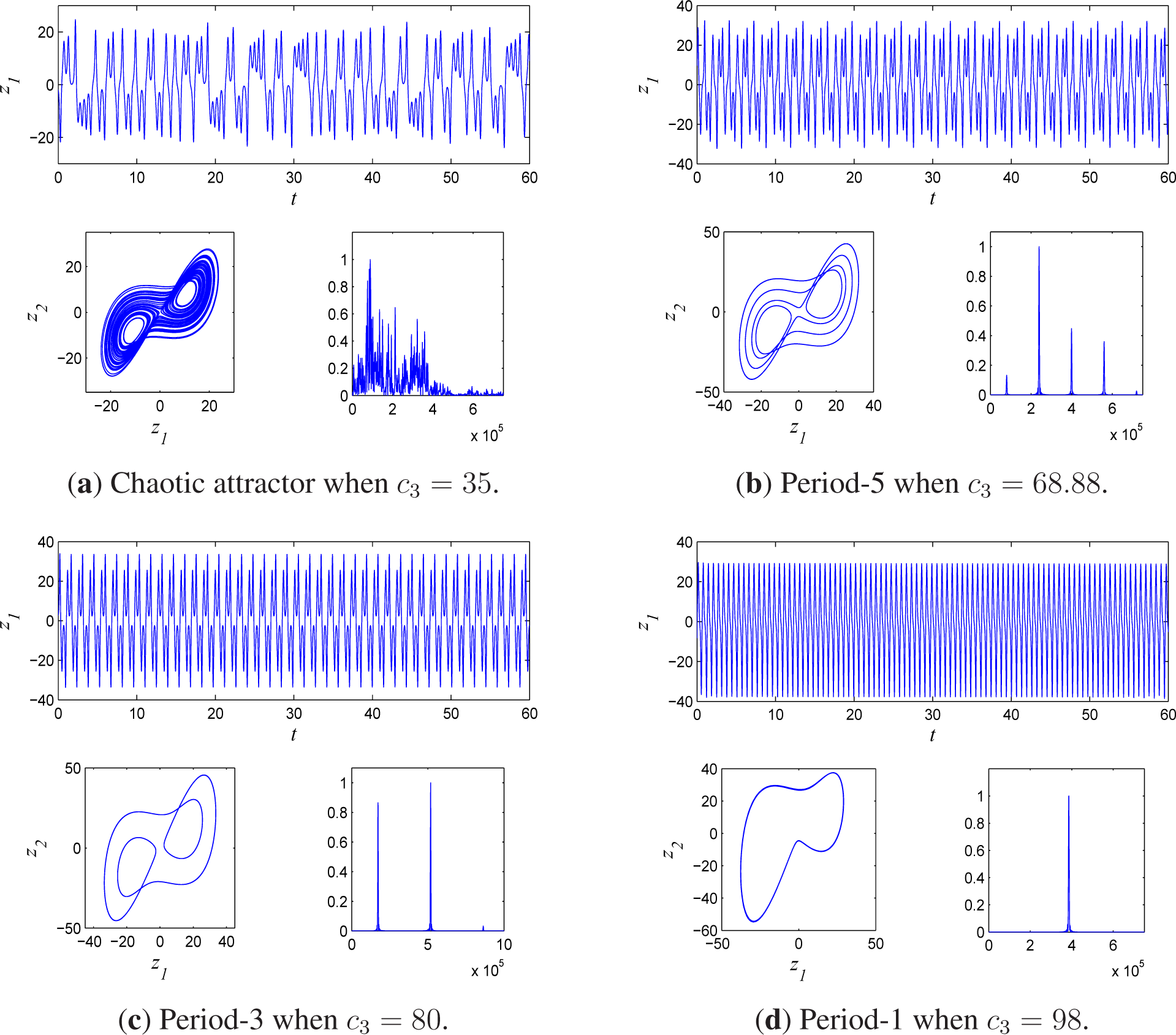
- System (11) undergoes the bifurcation from a stable focus to an unstable focus when c3 ∊ [10, 18.12];
- The first inverse period-doubling bifurcation from chaos beginning at c3 = 18.121 to the period-5 orbit when c3 ∊ [67.84, 68.95]; the second inverse period-doubling bifurcation from chaos beginning at c3 = 68.96 to the period-3 orbit when c3 ∊ [73.77, 81.9]; the third inverse period-doubling bifurcation from chaos beginning at c3 = 81.91 to the period-1 orbit when c3 ∊ [97.83, 100];
- The occurrence of intermittent chaos.
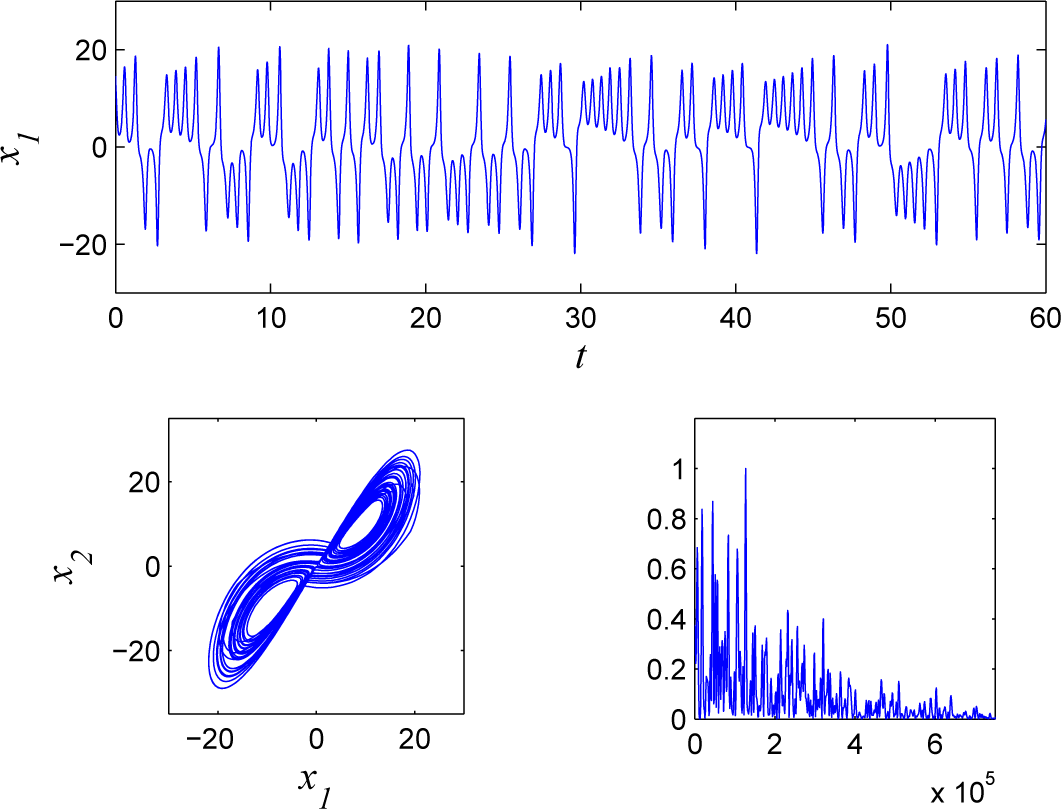
3.3.2. The Largest Lyapunov Exponent, Phase Portraits and Power Spectrum Analysis
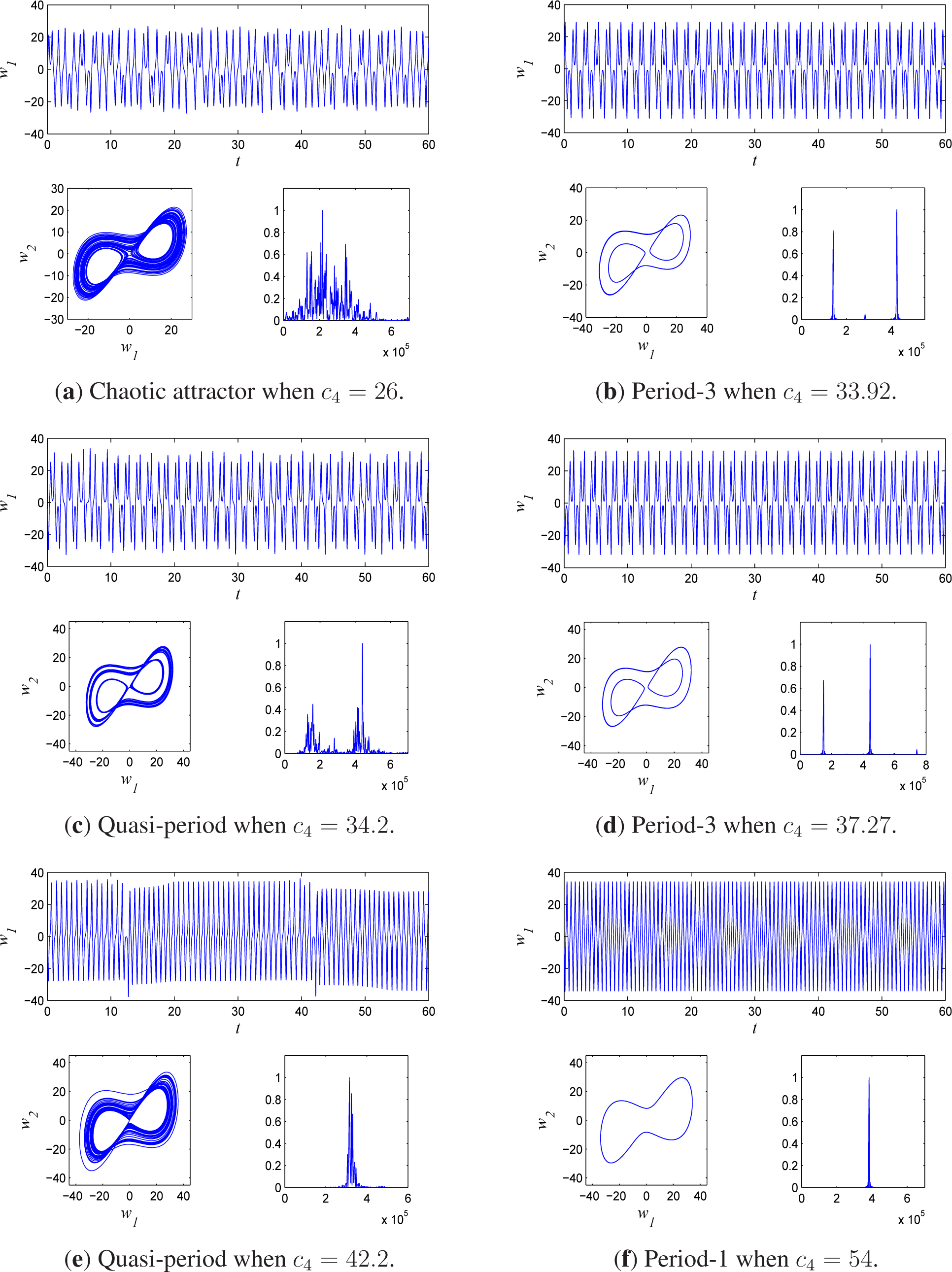
3.4. Fractional-Order Lorenz System with the Flux-Controlled Memristor Characterized by a Quartic Nonlinearity
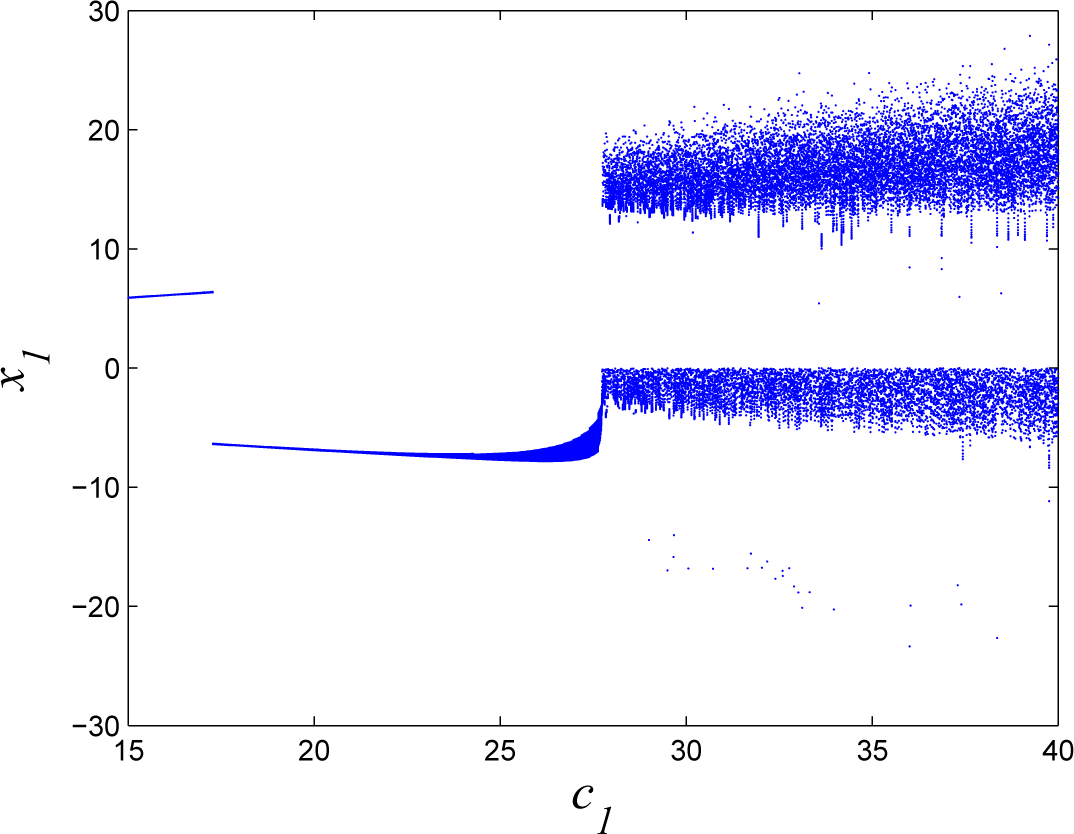
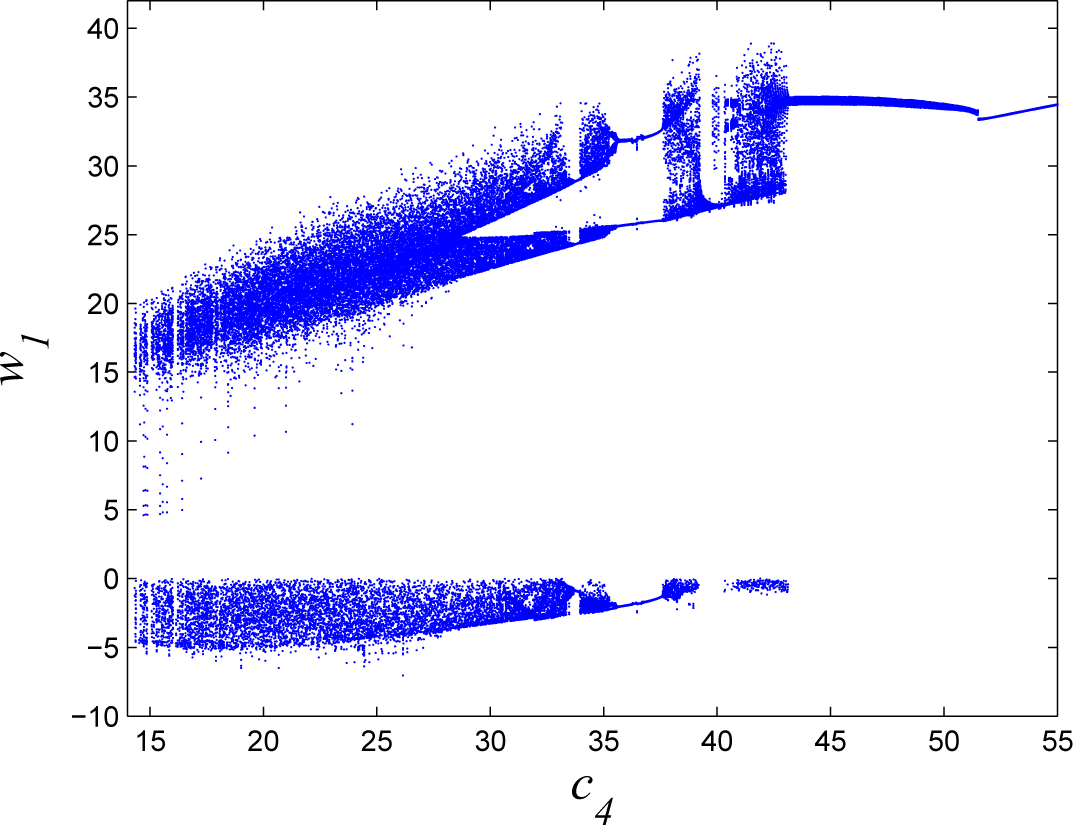
3.4.1. Bifurcation Analysis
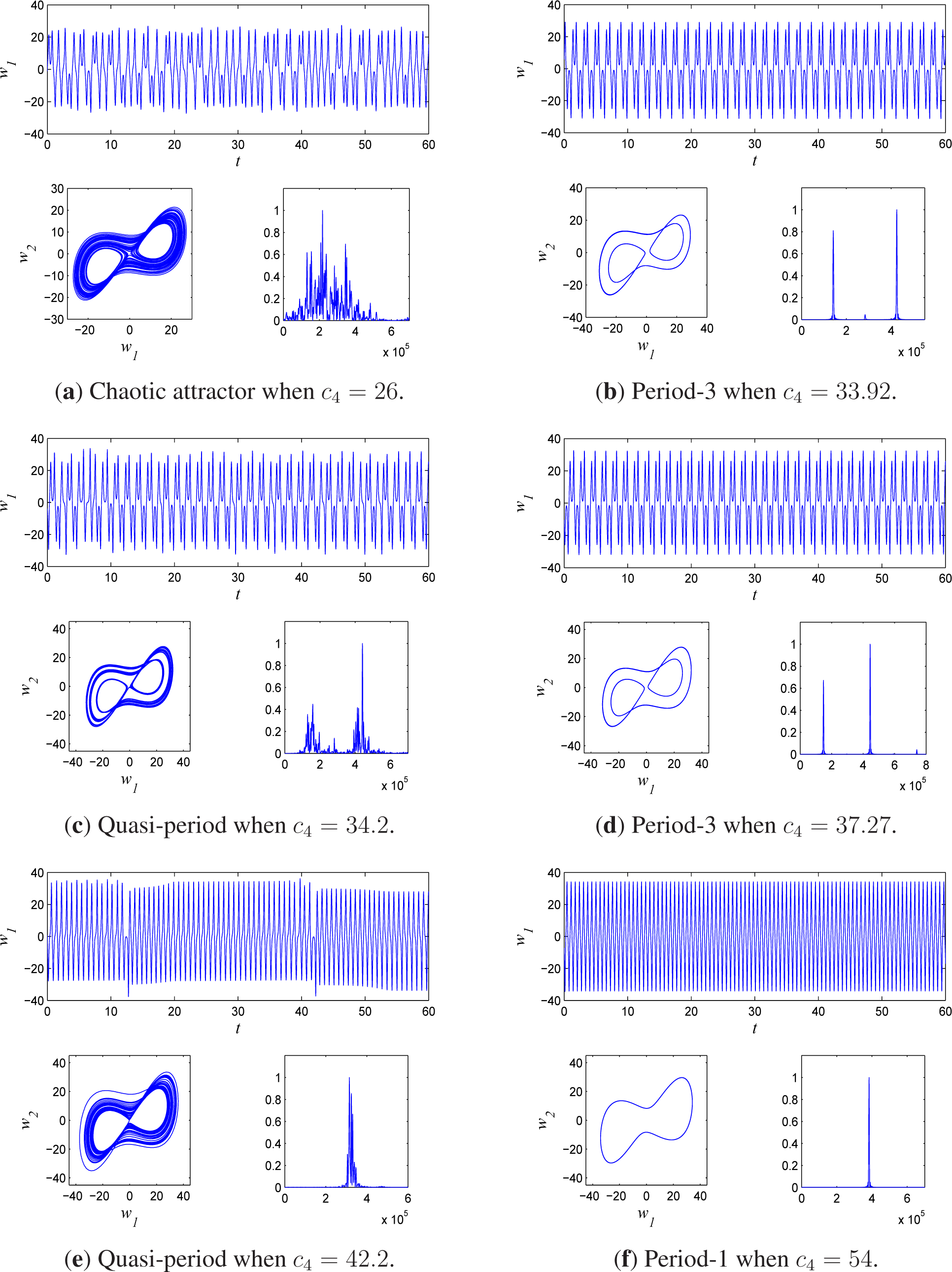
- System (14) goes through the bifurcation from focus beginning at c4 = 14.32 to chaos beginning at c4 = 18.41;
- The first inverse period-doubling bifurcation from chaos beginning at c4 = 18.41 to the period-3 orbit when c4 ∊ [33.69, 34.09]; the first quasi-period beginning at c4 = 34.1 to the period-3 orbit when c4 ∊ [35.6, 37.69]; the second inverse period-doubling bifurcation from chaos beginning at c4 = 37.7 to the second quasi-period when c4 ∊ [42.175, 42.37] to the period-1 orbit when c4 ∊ [42.38, 55];
- The occurrence of intermittent chaos.
3.4.2. The Largest Lyapunov Exponent, Phase Portraits and Power Spectrum Analysis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chua, L.O. Memristor—the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar]
- Sharifi, M.J.; Banadaki, Y.M. General spice models for memristor and application to circuit simulation of memristor-based synapses and memory cells. J. Circuit Syst. Comput. 2010, 19, 407–424. [Google Scholar]
- Berzina, T.; Smerieri, A.; Bernabo, M.; Pucci, A.; Ruggeri, G.; Erokhin, V.; Fontana, M.P. Optimization of an organic memristor as an adaptive memory element. J. Appl. Phys. 2009, 105. [Google Scholar] [CrossRef]
- Eshraghian, K.; Cho, K.R.; Kavehei, O.; Kang, S.K.; Abbott, D.; Kang, S.M.S. Memristor MOS content addressable memory(MCAM): Hybrid architecture for future high performance search engines. IEEE Trans. Very Large Scale Integr. Syst. 2010, 19, 1407–1417. [Google Scholar]
- Wen, S.; Zeng, Z.; Huang, T.; Chen, Y. Passivity analysis of memristor-based recurrent neural networks with time-varying delays. J. Frankl. Inst. 2013, 350, 2354–2370. [Google Scholar]
- Wang, W.; Li, L.; Peng, H.; Xiao, J.; Yang, Y. Synchronization control of memristor-based recurrent neural networks with perturbations. Neural Netw. 2014, 53, 8–14. [Google Scholar]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar]
- Barboza, R.; Chua, L.O. The four-element Chua’s circuit. Int. J. Bifurc. Chaos. 2008, 18, 943–955. [Google Scholar]
- Itoh, M.; Chua, L.O. Memristor oscillators. Int. J. Bifurc. Chaos. 2008, 18, 3183–3206. [Google Scholar]
- Li, C.; Wei, M.; Yu, J. Chaos generator based on a PWL memristor. Proceedings of the 2009 International Conference on Communications, Circuits and Systems, Milpitas, CA, USA, 23–25 July 2009; pp. 944–947.
- Huang, J.; Li, C.; He, X. Stabilization of a memristor-based chaotic system by intermittent control and fuzzy processing. Int. J. Control Autom. Syst. 2013, 11, 643–647. [Google Scholar]
- Zhong, Q.; Yu, Y.; Yu, J. Fuzzy modeling and impulsive control of a memristor-based chaotic system. Chin. Phys. Lett. 2010, 27, 020501. [Google Scholar]
- Bao, B.; Xu, J.; Liu, Z. Initial state dependent dynamical behaviors in a memristor based chaotic circuit. Chin. Phys. Lett. 2010, 27, 070504. [Google Scholar]
- Li, Y.; Huang, X.; Guo, M. The generation, analysis, and circuit implementation of a new memristor based chaotic system. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Bao, B.; Liu, Z.; Xu, J. Steady periodic memristor oscillator with transient chaotic behaviours. Electron. Lett. 2010. [Google Scholar]
- Bao, B.; Liu, Z.; Xu, J. Dynamical analysis of memristor chaotic oscillator. Acta Phys. Sin. 2010, 59. [Google Scholar] [CrossRef]
- Bao, B.; Hu, W.; Xu, J.; Liu, Z.; Zou, L. Analysis and implementation of memristor chaotic circuit. Acta Phys. Sin. 2011, 60. [Google Scholar] [CrossRef]
- Teng, L.; Iu, H.H.C.; Wang, X.Y.; Wang, X.K. Chaotic behavior in fractional-order memristor-based simplest chaotic circuit using fourth degree polynomial. Nonlinear Dyn. 2014, 77, 231–241. [Google Scholar]
- Petráš, I. Fractional-order memristor-based Chua’s circuit. IEEE Trans. Circuits Syst. II 2010, 57, 975–979. [Google Scholar]
- Cafagna, D.; Grassi, G. On the simplest fractional-order memristor-based chaotic system. Nonlinear Dyn 2012, 70, 1185–1197. [Google Scholar]
- Wen, S.; Zeng, Z.; Huang, T.; Chen, Y. Fuzzy modeling and synchronization of different memristor-based chaotic circuits. Phys. Lett. A 2013, 377, 2016–2021. [Google Scholar]
- Ho, M.; Hung, Y. Synchronization of two different systems by using generalized active control. Phys. Lett. A 2003, 301, 424–428. [Google Scholar]
- Lin, J.; Yan, J.; Liao, T. Chaotic synchronization via adaptive sliding mode observers subject to input nonlinearity. Chaos Solitons Fractals 2005, 24, 371–381. [Google Scholar]
- Zhao, L.; Shieh, L.S.; Chen, G.; Coleman, N.P. Simplex sliding mode control for nonlinear uncertain systems via chaos optimization. Chaos Solitons Fractals 2005, 23, 747–755. [Google Scholar]
- Strukov, D.B.; Snider, G.S.; Stewart, G.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar]
- Chua, L.O.; Kang, S.M. Memristive devices and systems. Proc. IEEE 1976, 64, 209–223. [Google Scholar]
- Zhou, P.; Huang, K. A new 4-D non-equilibrium fractional-order chaotic system and its circuit implementation. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2005–2011. [Google Scholar]
- Zhou, P.; Yang, F. Hyperchaos, chaos, and horseshoe in a 4D nonlinear system with an infinite number of equilibrium points. Nonlinear Dyn. 2014, 76, 473–480. [Google Scholar]

© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, H.; Li, Y.; Huang, X. Generation and Nonlinear Dynamical Analyses of Fractional-Order Memristor-Based Lorenz Systems. Entropy 2014, 16, 6240-6253. https://doi.org/10.3390/e16126240
Xi H, Li Y, Huang X. Generation and Nonlinear Dynamical Analyses of Fractional-Order Memristor-Based Lorenz Systems. Entropy. 2014; 16(12):6240-6253. https://doi.org/10.3390/e16126240
Chicago/Turabian StyleXi, Huiling, Yuxia Li, and Xia Huang. 2014. "Generation and Nonlinear Dynamical Analyses of Fractional-Order Memristor-Based Lorenz Systems" Entropy 16, no. 12: 6240-6253. https://doi.org/10.3390/e16126240
APA StyleXi, H., Li, Y., & Huang, X. (2014). Generation and Nonlinear Dynamical Analyses of Fractional-Order Memristor-Based Lorenz Systems. Entropy, 16(12), 6240-6253. https://doi.org/10.3390/e16126240