


Precision Weed Control Using Unmanned Aerial Vehicles and Robots: Assessing Feasibility, Bottlenecks, and Recommendations for Scaling

 , ,
, ,  and
and
Abstract
1. Introduction
1.1. Challenges in Conventional Weed Management Approaches
1.2. Weed Menace in Organic Agriculture
1.3. Shrinking Agricultural Labor Force and Increasing Labor Wage
1.4. Precision Weed Control
- Artificial intelligence in PWC: We examined the role of computer vision (CV), machine learning (ML), and deep learning (DL) algorithms in crop–weed classification and mapping.
- PWC using Robots and UAVs: This section covers the efficiency, advantages, and disadvantages of these methods.
- Bottlenecks for adoption: Identifies existing barriers to large-scale use of robots and UAVs in agriculture.
- Interventions for scaling PWC: Propose innovative solutions to overcome these challenges.
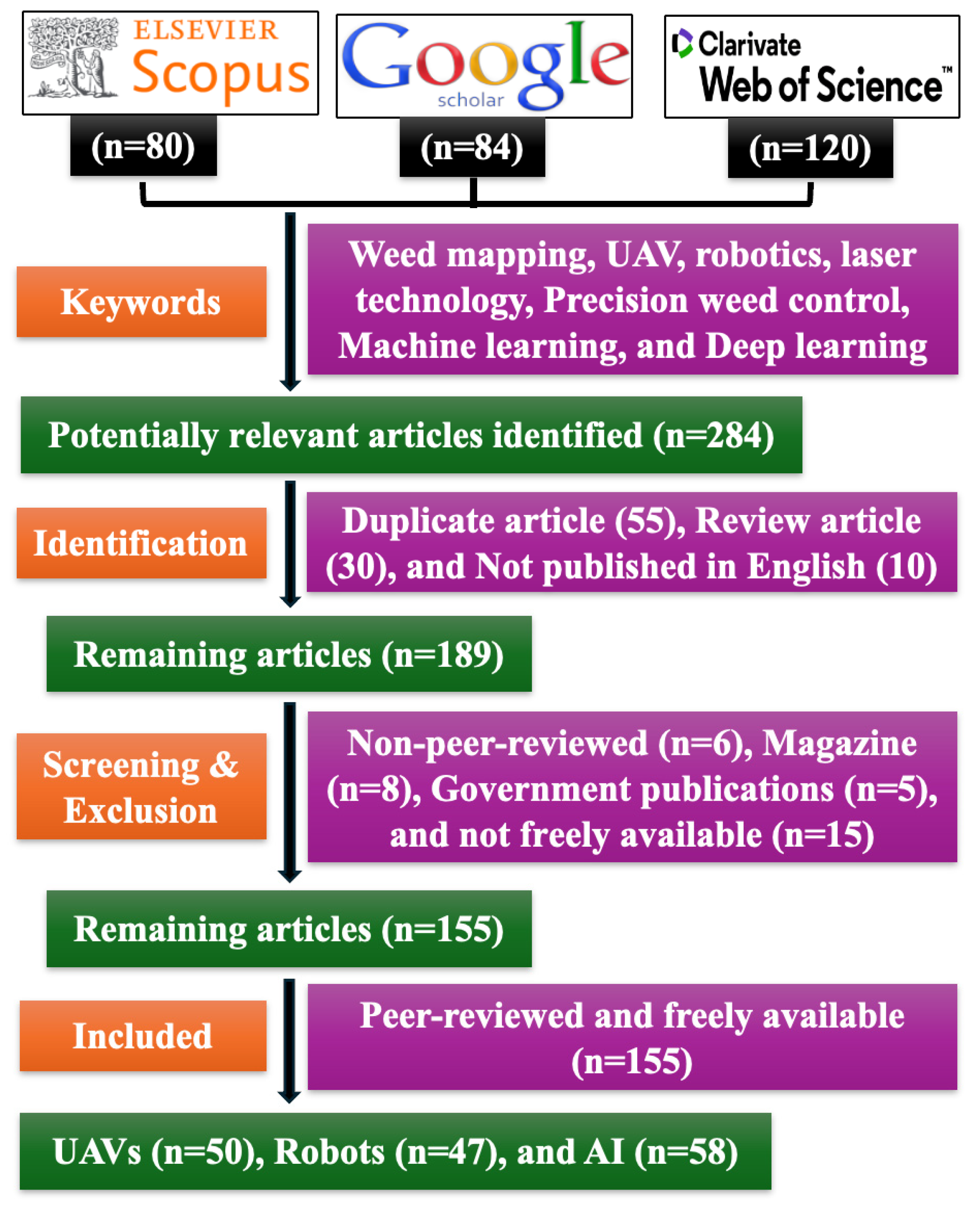
2. Methodology of Literature Selection for the Review
3. Artificial Intelligence in Precision Weed Control
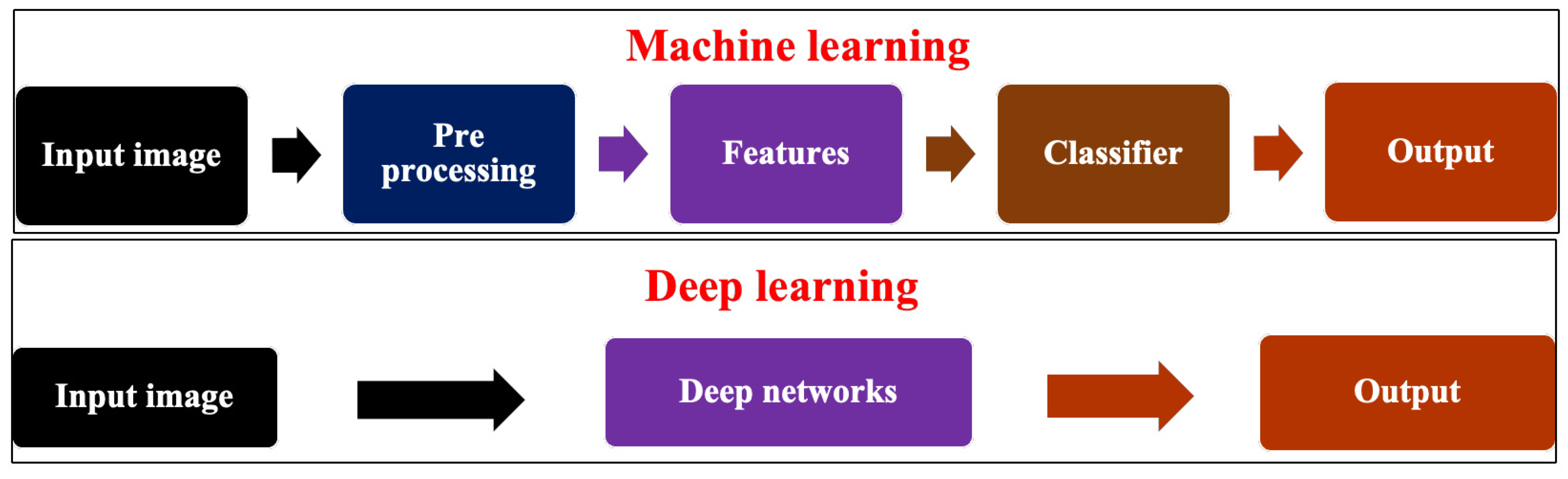
3.1. Image Classification Using AI Algorithms
3.2. Challenges to Using AI in Image Analysis for Weed Mapping
3.2.1. Data-Related Challenges
3.2.2. Technical Challenges
3.3. Interventions to Overcome Challenges in AI-Based Weed Mapping
3.3.1. Data-Related Interventions
3.3.2. Technical-Related Interventions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
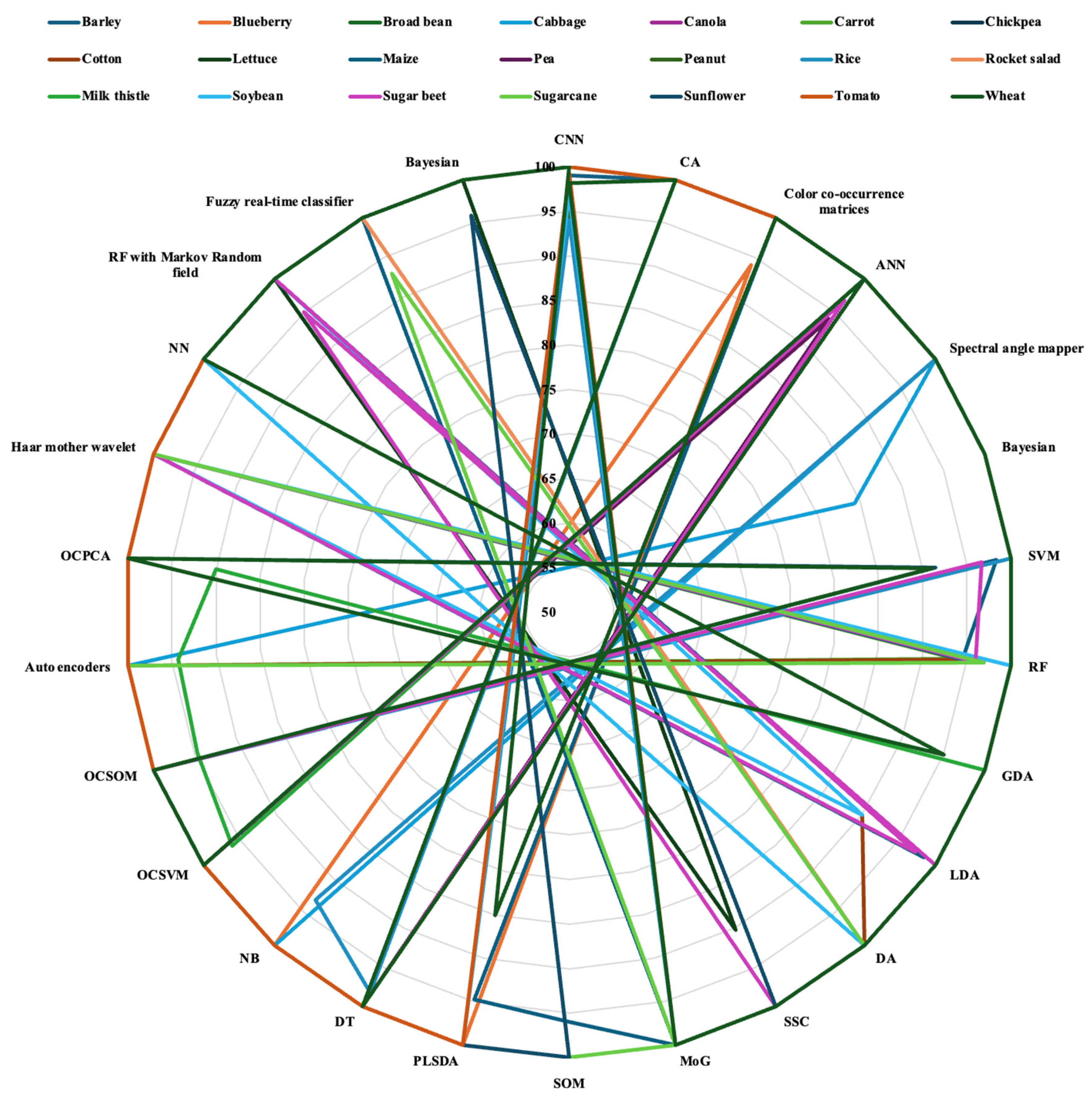
| Crops | Models and Performance Accuracy (%) | Reference | |
|---|---|---|---|
| Barley | CNN | 99 | [71] |
| CA | 100 | [72] | |
| Blueberry | Color co-occurrence matrices | 94 | [73] |
| Broad bean | ANN | 100 | [74] |
| Cabbage | Spectral angle mapper | 100 | [75] |
| Bayesian | 84.3 | [76] | |
| Canola | ANN | 94 | [77] |
| Carrot | RF | 93.8 | [47] |
| Chickpea | GDA | 95 | [76] |
| Cotton | CNN | 99.3 | [30] |
| RF | 85.8 | [78] | |
| CNN | 97 | [79] | |
| LDA | >90 | [80] | |
| RF | 94.4 | [81] | |
| DA | 100 | [82] | |
| Lettuce | SSC | 90.3 | [83] |
| Maize | RF | 94.5 | [84] |
| 94 | [84] | ||
| SVM, LDA | >98.4 | [85] | |
| MOGs | 100 | [50] | |
| MOGs, SOM | >96 | [51] | |
| SVM | 93 | [86] | |
| 97 | [87] | ||
| 81.6 | [88] | ||
| PLSDA | >94.8 | [89] | |
| LDA | 94 | [90] | |
| CA | 100 | [72] | |
| CNN | 95.6 | [84] | |
| SVM | 91.5 | [84] | |
| CNN | 98.2 | [91] | |
| Pea | ANN | 94 | [77] |
| Peanut | CNN | 95.6 | [92] |
| Rice | RF, SVM | 100 | [51] |
| DT | 98.2 | [93] | |
| SVM | 95.3 | ||
| NB | 93.1 | ||
| DA | 100 | [75] | |
| CNN | >94 | [94] | |
| Rocket salad | DA | 100 | [95] |
| Milk thistle | OCSVM | 96.1 | [52] |
| OCSOM | 94.7 | ||
| Autoencoders | 94.3 | ||
| OCPCA | 90 | ||
| Soybean | CNN | 92.9 | [84] |
| 97 | [96] | ||
| Haar mother wavelet | 100 | [97] | |
| NN | 100 | [88] | |
| LDA | >90 | [80] | |
| Sugar beet | CNN | 98.2 | [84] |
| RF with Markov random field | 95 | [53] | |
| CA | 100 | [72] | |
| RF | 96 | [98] | |
| SVM, ANN | 96.7 | [91] | |
| LDA | 97.3 | [99] | |
| Sugarcane | Fuzzy real-time classifier | 92.9 | [100] |
| RF | 97 | [89] | |
| Sunflower | SVM | 91.5 | [84] |
| Tomato | Bayesian | 95.9 | [90] |
| 95.8 | [90] | ||
| 92.2 | [101] | ||
| 95 | [101] | ||
| CNN | 99.3 | [30] | |
| Wheat | ANN | 94 | [77] |
| CNN | 98.2 | [84] | |
| 95.6 | [92] | ||
| CA | 100 | [72] | |
| SVM | 91 | [73] | |
| ANN | 100 | [74] | |
| PLSDA | 85 | [73] | |
| GDA | 95 | [76] | |
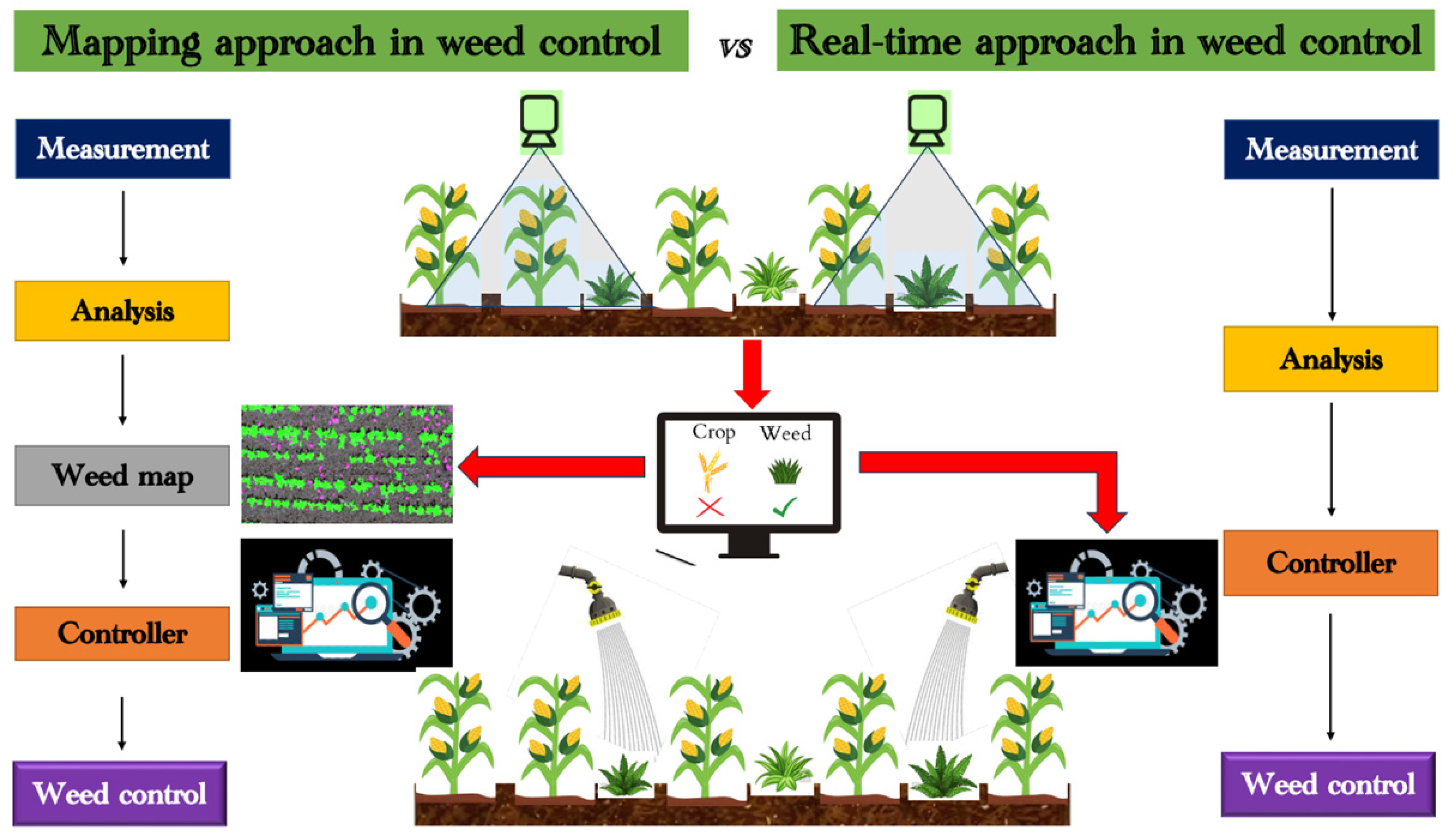
4. Execution Platform in Weed Control
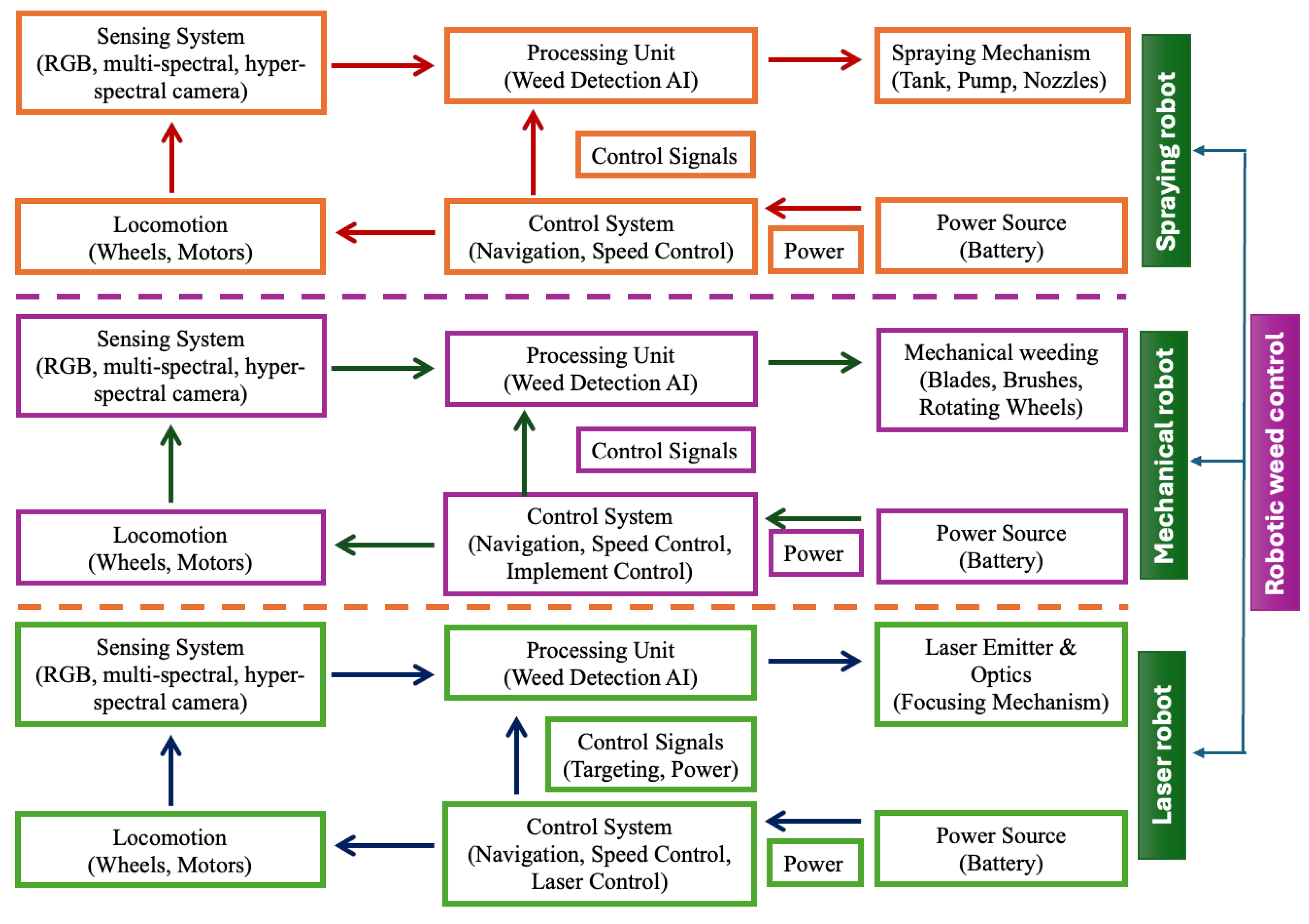
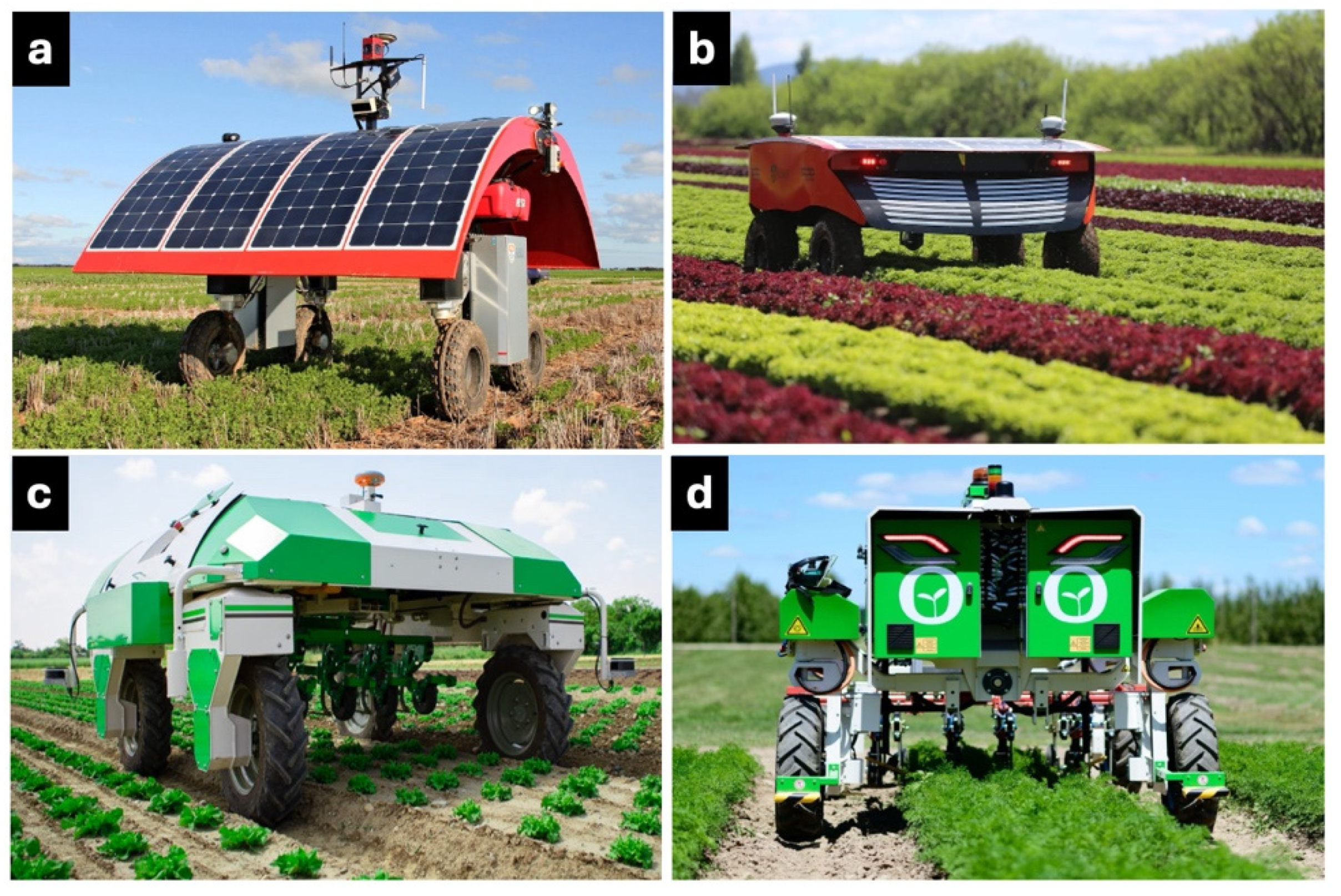
4.1. Weed Control Through Robots
4.1.1. Spraying Robot
4.1.2. Mechanical Weeding Robot
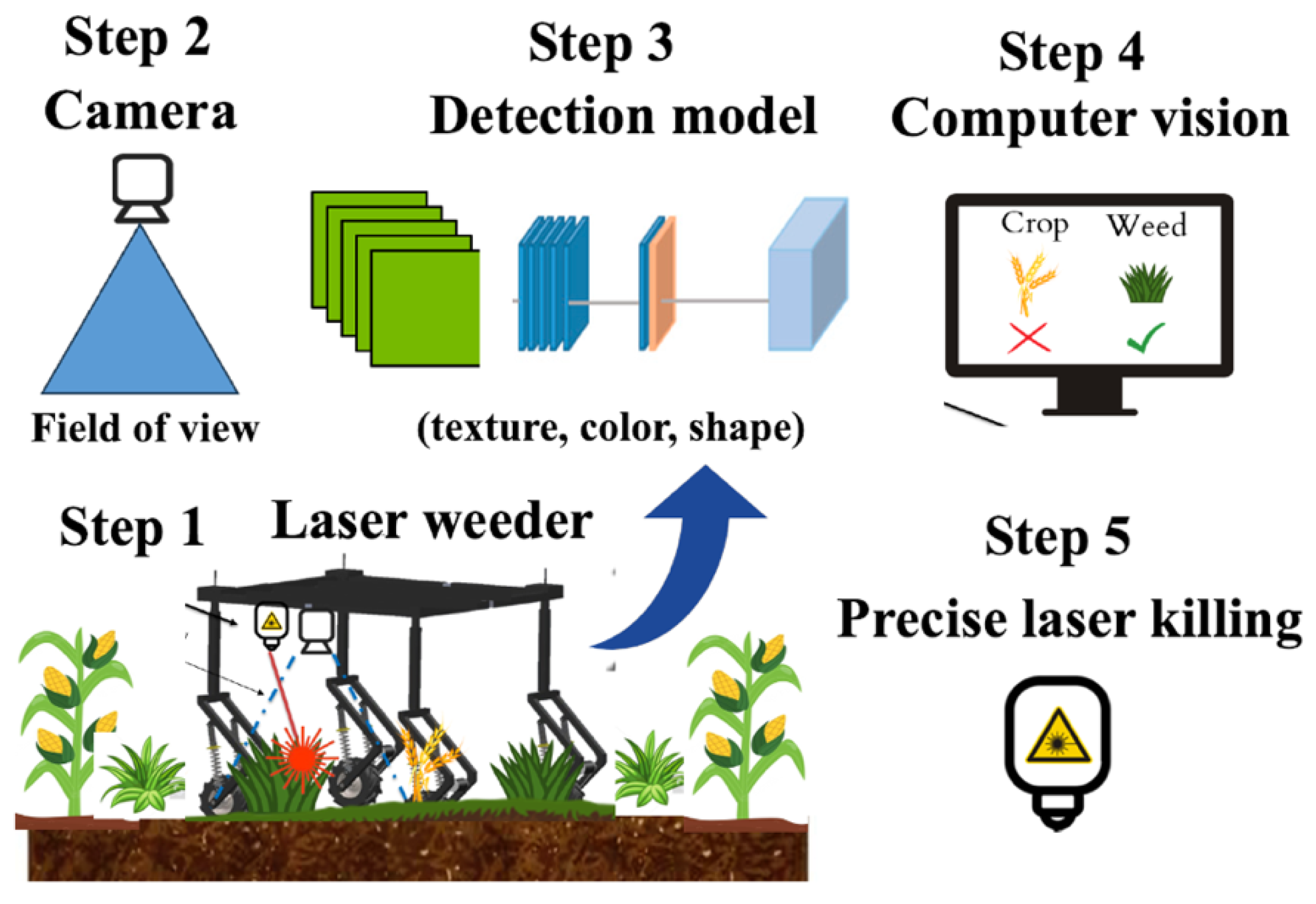
4.1.3. Laser Weeding Robot
4.1.4. Economics of Weeding Robots
| Weeds | Energy | Laser | Spot Diameter | Target Region and Weed Stage | Efficiency (%) | Reference |
|---|---|---|---|---|---|---|
| Sinapis arvensis, C. album | 50 W (2.3 J) | CO2 laser | 0.6 mm2 | Apical meristem | 90 | [146] |
| Tripleurospermum inodorum, S. media, B. napus | 5 W, 532 nm and 90 W, 810 nm | Continuous-wave diode laser | 0.9 and 1.8 mm and 1.2 and 2.4 mm | Apical meristem at cotyledon stage | 5 W, 532 nm laser and 18 mm spot diameter most effective | [135] |
| Elytrigia repens | 5 W 450 nm (35 J) | 0.55 mm | 35 days old | 86 | [40] | |
| Lolium rigidum | 25 W, 975 nm (76.4 J mm−2) | Fiber-coupled diode laser | 5 mm | Three-leaf stage | 100 | [147] |
| Amaranthus palmeri | 6.1 W 450 nm for 1.5 s (9.25 J) | Diode lasers | 0.8 and 2.65 mm | 2 weeks after emergence | 80 | [140] |
| Amaranthus retroflexus | 125 J, 10,600 nm | CO2 laser | 3.0, 4.2, and 6.0 mm | 3 stages (Cotyledons completely unfolded, two true leaves and >4 true leaves), Meristem | 100 | [139] |
| 230 J, 1980 nm | Fiber laser | |||||
| 237 J, 940 nm | Diode laser | |||||
| 1400 J, 532 nm | Solid-state laser |
4.1.5. Challenges to the Adoption of Robotic Weed Control
4.1.6. Key Recommendations for Scaling Robotic Weed Control in Agriculture
4.2. Unmanned Aerial Vehicles
4.2.1. UAVs for Precision Weed Control
4.2.2. Advantages of Using UAVs in Weed Management
| Country | Crop | Cost Saving | Percent Saving of Herbicide | Percent Weed Control Efficiency | Reference |
|---|---|---|---|---|---|
| Italy | Maize | 16–45 EUR/ha | 14–39.2 | No difference | [177] |
| Italy | Maize | - | 37 | - | [174] |
| China | Wheat | - | 50 | 98.45 | [173] |
| USA | Surrogate weed | - | - | 94 | [66] |
| USA | Maize | - | 26 | 78.4 | [78] |
| China | Wheat | - | - | 98 | [41] |
| Germany | Maize Sugar beet | - | - | 96 80 | [172] |
| Iran | Volunteer Barley | - | - | 94.3 | [42] |
| India | Wheat | - | - | 44.8 | [183] |
| India | Rice | 1050 INR/ha | - | 78.8 | [179] |
| Italy | Maize | 15.91 EUR/ha to 32.93 EUR/ha | 42.5 | 98.1 | [178] |
4.2.3. Variation in UAV Regulations Across Countries and Their Impact on Adoption
4.2.4. Real-Time Object Detection
4.2.5. Bottlenecks for UAV Adoption in Agriculture
4.2.6. Scaling UAV Technology in Agriculture
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alexandratos, N.; Bruinsma, J. World Agriculture Towards 2030/2050: The 2012 Revision. 2012. Available online: https://ageconsearch.umn.edu/record/288998?v=pdf (accessed on 21 November 2024).
- Ramesh, K.; Vijayakumar, S.; Upadhyay, P.K.; Chauhan, B.S. Revisiting the concept of the critical period of weed control. J. Agric. Sci. 2022, 159, 636–642. [Google Scholar] [CrossRef]
- Kubiak, A.; Wolna-Maruwka, A.; Niewiadomska, A.; Pilarska, A.A. The problem of weed infestation of agricultural plantations vs. the assumptions of the European biodiversity strategy. Agronomy 2022, 12, 1808. [Google Scholar] [CrossRef]
- Horvath, D.P.; Clay, S.A.; Swanton, C.J.; Anderson, J.V.; Chao, W.S. Weed-induced crop yield loss: A new paradigm and new challenges. Trends Plant Sci. 2023, 28, 567–582. [Google Scholar] [CrossRef]
- Llewellyn, R.S.; Ronning, D.; Ouzman, J.; Walker, S.; Mayfield, A.; Clarke, M. Impact of Weeds on Australian Grain Production: The Cost of Weeds to Australian Grain Growers and the Adoption of Weed Management Tillage practices. Report for, the Grains Research and Development Corporation (GRDC) and the Commonwealth Scientific and Industrial Research Organisation (CSIRO), Australia, 2016, 1–112. Available online: https://grdc.com.au/__data/assets/pdf_file/0027/75843/grdc_weeds_review_r8.pdf.pdf (accessed on 11 November 2024).
- Gharde, Y.; Singh, P.K.; Dubey, R.P.; Gupta, P.K. Assessment of yield and economic losses in agriculture due to weeds in India. Crop Prot. 2018, 107, 12–18. [Google Scholar] [CrossRef]
- Pimentel, D.; Zuniga, R.; Morrison, D. Update on the environmental and economic costs associated with alien-invasive species in the United States. Ecol. Econ. 2005, 52, 273–288. [Google Scholar] [CrossRef]
- Loux, M.M.; Doohan, D.; Dobbels, A.F.; Johnson, W.G.; Young, B.G.; Legleiter, T.R.; Hager, A. Weed Control Guide for Ohio; University of Illinois: Champaign, IL, USA, 2017; pp. 1–2. [Google Scholar]
- Mesterházy, Á.; Oláh, J.; Popp, J. Losses in the Grain Supply Chain: Causes and Solutions. Sustainability 2020, 12, 2342. [Google Scholar] [CrossRef]
- Sibuga, K.P. The Role of Women and Children in Weed Management in Smallholder Farming Systems. In Proceedings of the 17th Biennial Weed Science Society Conference for Eastern Africa, Harare, Zimbabwe, September 1999; pp. 85–90. [Google Scholar]
- Rodenburg, J.; Johnson, D.E. Weed management in rice-based cropping systems in Africa. Adv. Agron. 2009, 103, 149–218. [Google Scholar] [CrossRef]
- Harker, K.N.; O’Donovan, J.T. Recent Weed Control, Weed Management, and Integrated Weed Management. Weed Technol. 2013, 27, 1–11. [Google Scholar] [CrossRef]
- Vijayakumar, S.; Choudhary, A.K.; Deiveegan, M.; Subramanian, E.; Joshi, E.; Goud, B.R.; Kumar, T.S. The opportunities and challenges for harvest weed seed control (HWSC) in India: An opinion. Indian J. Weed Sci. 2022, 54, 11–17. [Google Scholar] [CrossRef]
- Heap, I. The International Herbicide-Resistant Weed Database. Online. Tuesday 2023, 29, 2023. [Google Scholar]
- Miyazaki, J.; Bauer-Panskus, A.; Bøhn, T.; Reichenbecher, W.; Then, C. Insufficient risk assessment of herbicide-tolerant genetically engineered soybeans intended for import into the EU. Environ. Sci. Eur. 2019, 31, 1–21. [Google Scholar] [CrossRef]
- Ofosu, R.; Agyemang, E.D.; Márton, A.; Pásztor, G.; Taller, J.; Kazinczi, G. Herbicide Resistance: Managing Weeds in a Changing World. Agronomy 2023, 13, 1595. [Google Scholar] [CrossRef]
- Adhikari, S.P.; Yang, H.; Kim, H. Learning semantic graphics using convolutional encoder–decoder network for autonomous weeding in paddy. Front. Plant Sci. 2019, 10, 1404. [Google Scholar] [CrossRef]
- Duke, S.O. Why have no new herbicide modes of action appeared in recent years? Pest. Manag. Sci. 2012, 68, 505–512. [Google Scholar] [CrossRef]
- Wynn, S.; Webb, E. Impact assessment of the loss of glyphosate within the EU: A literature review. Environ. Sci. Eur. 2022, 34, 91. [Google Scholar] [CrossRef]
- Shahbandeh. Area of Organic Farming Worldwide 2000–2021. 2023. Available online: https://www.statista.com/statistics/268763/organic-farming-area-worldwide-since-2000/ (accessed on 5 September 2023).
- Willer, H.; Trávníček, J.; Meier, C.; Schlatter, B. The World of Organic Agriculture. Statistics and Emerging Trends 2021; Research Institute of Organic Agriculture FiBL, Frick, and IFOAM—Organics International: Bonn, Germany, 2021; Available online: www.organic-world.net/yearbook/yearbook-2021.html (accessed on 15 November 2024).
- McErlich, A.F.; Boydston, R.A. Current state of weed management in organic and conventional cropping systems. In Automation: The Future of Weed Control in Cropping Systems; Springer: Dordrecht, The Netherlands, 2013; pp. 11–32. [Google Scholar]
- Monteiro, A.; Santos, S. Sustainable approach to weed management: The role of precision weed management. Agronomy 2022, 12, 118. [Google Scholar] [CrossRef]
- Pooja, K.; Saravanane, P.; Sridevi, V.; Nadaradjan, S.; Vijayakumar, S. Effect of cultivars and weed management practices on productivity, profitability and energetics of dry direct-seeded rice. Oryza-Int. J. Rice 2021, 58, 442–447. [Google Scholar] [CrossRef]
- Chatterjee, A.; Lal, R. On farm assessment of tillage impact on soil carbon and associated soil quality parameters. Soil Tillage Res. 2009, 104, 270–277. [Google Scholar] [CrossRef]
- Cloutier, D.C.; Leblanc, M.L. Mechanical weed control in agriculture. In Physical Control Methods in Plant Protection; Vincent, C., Panneton, B., Fleurat-Lessard, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar] [CrossRef]
- Seok, J.H.; Moon, H.; Kim, G.; Reed, M.R. Is Aging the Important Factor for Sustainable Agricultural Development in Korea? Evidence from the Relationship between Aging and Farm Technical Efficiency. Sustainability 2018, 10, 2137. [Google Scholar] [CrossRef]
- Felipe, J.; Bayudan-Dacuycuy, C.; Lanzafame, M. The Declining Share of Agricultural Employment in the People’s Republic of China: How Fast? Struct. Change Econ. Dyn. 2016, 37, 127–137. [Google Scholar] [CrossRef]
- Jinger, D.; Dass, A.; Kumar, S.V.; Kaur, R.; Kumari, K. Weed management strategy in climate change era. Indian Farming 2016, 66, 9–13. [Google Scholar]
- Espejo-Garcia, B.; Mylonas, N.; Athanasakos, L.; Fountas, S.; Vasilakoglou, I. Towards weeds identification assistance through transfer learning. Comput. Electron. Agric. 2020, 171, 105306. [Google Scholar] [CrossRef]
- Shannon, D.; Clay, D.E.; Sudduth, K.A. An introduction to precision agriculture. In Precision Agriculture Basics; American Society of Agronomy, Crop Science Society of America, Soil Science Society of America: Madison, WI, USA, 2018. [Google Scholar] [CrossRef]
- Umeda, S.; Yoshikawa, N.; Seo, Y. Cost and Workload Assessment of Agricultural Drone Sprayer: A Case Study of Rice Production in Japan. Sustainability 2022, 14, 10850. [Google Scholar] [CrossRef]
- Nasir, F.E.; Tufail, M.; Haris, M.; Iqbal, J.; Khan, S.; Khan, M.T. Precision agricultural robotic sprayer with real-time Tobacco recognition and spraying system based on deep learning. PLoS ONE 2023, 18, e0283801. [Google Scholar] [CrossRef]
- Partel, V.; Kakarla, S.C.; Ampatzidis, Y. Development and evaluation of a low cost and smart technology for precision weed management utilizing artificial intelligence. Comput. Electron. Agric. 2019, 157, 339–350. [Google Scholar] [CrossRef]
- Marx, C.; Pastrana Pérez, J.C.; Hustedt, M.; Barcikowski, S.; Haferkamp, H.; Rath, T. Investigations on the absorption and the application of laser radiation for weed control. Land Tech. 2012, 67, 95–101. [Google Scholar]
- Lati, R.N.; Siemens, M.C.; Rachuy, J.S.; Fennimore, S.A. Intrarow weed removal in broccoli and transplanted lettuce with an intelligent cultivator. Weed Technol. 2016, 30, 655–663. [Google Scholar] [CrossRef]
- Bochtis, D.; Benos, L.; Lampridi, M.; Marinoudi, V.; Pearson, S.; Sørensen, C.G. Agricultural workforce crisis in light of the COVID-19 pandemic. Sustainability 2020, 12, 8212. [Google Scholar] [CrossRef]
- Zawada, M.; Legutko, S.; Gościańska-Łowińska, J.; Szymczyk, S.; Nijak, M.; Wojciechowski, J.; Zwierzyński, M. Mechanical Weed Control Systems: Methods and Effectiveness. Sustainability 2023, 15, 15206. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Enhancing smart farming through the applications of Agriculture 4.0 technologies. Int. J. Intell. Netw. 2022, 3, 150–164. [Google Scholar] [CrossRef]
- Rakhmatulin, I.; Andreasen, C. A concept of a compact and inexpensive device for controlling weeds with laser beams. Agronomy 2020, 10, 1616. [Google Scholar] [CrossRef]
- Chen, Y.; Qi, H.L.; Li, G.Z.; Lan, Y.B.A. Weed control effect of unmanned aerial vehicle (UAV) application in wheat field. Int. J. Precis. Agric. Aviat. 2019, 1, 25–31. [Google Scholar] [CrossRef]
- Aliverdi, A. The effect of nozzle type in an unmanned aerial sprayer on the activity of herbicide haloxyfop-R-methyl against volunteer barley. Appl. Entomol. Phytopathol. 2022, 89, 269–275. [Google Scholar] [CrossRef]
- Sonka, M.; Boyle, R.; Hlavac, V. Image Processing Analysis Machine Vision; Cengage Learning: Stamford, CT, USA, 2015; ISBN 10: 1-133-59360-7. [Google Scholar]
- Ghergan, O.C.; Drăghiescu, D.; Iosim, I.; Necşa, P.A. The Role of Computer Vision in Sustainable Agriculture. Lucr. Stiintifice Ser. I Manag. Agric. 2021, 23, 82–88. [Google Scholar] [CrossRef]
- Steward, B.; Gai, J.; Tang, L. The use of agricultural robots in weed management and control. In Robotics and Automation for Improving Agriculture; Burleigh Dodds Science Publishing: Sawston, UK, 2019; pp. 161–186. [Google Scholar] [CrossRef]
- Talaviya, T.; Shah, D.; Patel, N.; Yagnik, H.; Shah, M. Implementation of artificial intelligence in agriculture for optimisation of irrigation and application of pesticides and herbicides. Artif. Intell. Agric. 2020, 4, 58–73. [Google Scholar] [CrossRef]
- Haug, S.; Michaels, A.; Biber, P.; Ostermann, J. Plant classifcation system for crop/weed discrimination without segmentation. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Steamboat Springs, CO, USA, 24–26 March 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1142–1149. [Google Scholar] [CrossRef]
- Junior, L.C.; Alfredo, J.; Ulson, C. Real time weed detection using computer vision and Deep Learning. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 15–18 August 2021. [Google Scholar] [CrossRef]
- Pai, D.G.; Kamath, R.; Balachandra, M. Deep Learning Techniques for Weed Detection in Agricultural Environments: A Comprehensive Review. IEEE Access 2024, 12, 113193–113214. [Google Scholar] [CrossRef]
- Pantazi, X.E.; Moshou, D.; Bravo, C. Active learning system for weed species recognition based on hyperspectral sensing. Biosyst. Eng. 2016, 146, 193–202. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, J.; Cen, H.; Lu, Y.; Yu, X.; He, Y.; Pieters, J.G. Automated spectral feature extraction from hyperspectral images to differentiate weedy rice and barnyard grass from a rice crop. Comput. Electron. Agric. 2019, 159, 42–49. [Google Scholar] [CrossRef]
- Alexandridis, T.K.; Tamouridou, A.A.; Pantazi, X.E.; Lagopodi, A.L.; Kashefi, J.; Ovakoglou, G.; Polychronos, V.; Moshou, D. Novelty detection classifiers in weed mapping: Silybum marianum detection on UAV multispectral images. Sensors 2017, 17, 2007. [Google Scholar] [CrossRef] [PubMed]
- Lottes, P.; Hoeferlin, M.; Sander, S.; Müter, M.; Schulze, P.; Stachniss, L.C. An effective classification system for separating sugar beets weeds for precision farming applications. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 5157–5163. [Google Scholar] [CrossRef]
- Zhong, Y.; Gao, J.; Lei, Q.; Zhou, Y. A vision-based counting and recognition system for flying insects in intelligent agriculture. Sensors 2018, 18, 1489. [Google Scholar] [CrossRef] [PubMed]
- Kargar, B.; Shirzadifar, M. Automatic weed detection system and smart herbicide sprayer robot for corn fields. In Proceedings of the First RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 13–15 February 2013; pp. 468–473. [Google Scholar] [CrossRef]
- Zhang, Y.; Staab, E.S.; Slaughter, D.C.; Giles, D.K.; Downey, D. Precision automated weed control using Hyperspectral vision identification and heated oil. In Proceedings of the American Society of Agricultural and Biological Engineers (ASABE), Reno, Nevada, 21–24 June 2009. [Google Scholar] [CrossRef]
- Qu, H.R.; Su, W.H. Deep Learning-Based Weed–Crop Recognition for Smart Agricultural Equipment: A Review. Agronomy 2024, 14, 363. [Google Scholar] [CrossRef]
- Singh, V.; Rana, A.; Bishop, M.; Filippi, A.M.; Cope, D.; Rajan, N.; Bagavathiannan, M. Unmanned aircraft systems for precision weed detection and management: Prospects and challenges. Adv. Agron. 2020, 159, 93–134. [Google Scholar] [CrossRef]
- Jung, J.; Maeda, M.; Chang, A.; Bhandari, M.; Ashapure, A.; Landivar-Bowles, J. The potential of remote sensing and artificial intelligence as tools to improve the resilience of agriculture production systems. Curr. Opin. Biotechnol. 2021, 70, 15–22. [Google Scholar] [CrossRef]
- Aldoseri, A.; Al-Khalifa, K.N.; Hamouda, A.M. Re-thinking data strategy and integration for artificial intelligence: Concepts, opportunities, and challenges. Appl. Sci. 2023, 13, 7082. [Google Scholar] [CrossRef]
- Vayssade, J.A.; Jones, G.; Paoli, J.N. Towards the characterization of crop and weeds at leaf scale: A large comparison of shape, spatial and textural features. Smart Agric. Technol. 2023, 5, 100245. [Google Scholar] [CrossRef]
- Sun, B.; Li, Y.; Huang, J.; Cao, Z.; Peng, X. Impacts of Variable Illumination and Image Background on Rice LAI Estimation Based on UAV RGB-Derived Color Indices. Appl. Sci. 2024, 14, 3214. [Google Scholar] [CrossRef]
- Rai, N.; Zhang, Y.; Ram, B.G.; Schumacher, L.; Yellavajjala, R.K.; Bajwa, S.; Sun, X. Applications of deep learning in precision weed management: A review. Comput. Electron. Agric. 2023, 206, 107698. [Google Scholar] [CrossRef]
- Dara, R.; Hazrati Fard, S.M.; Kaur, J. Recommendations for ethical and responsible use of artificial intelligence in digital agriculture. Front. Artif. Intell. 2022, 5, 884192. [Google Scholar] [CrossRef]
- Mohsan, S.A.; Othman, N.Q.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef] [PubMed]
- Hunter, J.E.; Gannon, T.W.; Richardson, R.J.; Yelverton, F.H.; Leon, R.G. Integration of remote-weed mapping and an autonomous spraying unmanned aerial vehicle for site-specific weed management. Pest Manag. Sci. 2020, 76, 1386–1392. [Google Scholar] [CrossRef] [PubMed]
- Gil, G.; Casagrande, D.E.; Cortés, L.P.; Verschae, R. Why the low adoption of robotics in the farms? Challenges for the establishment of commercial agricultural robots. Smart Agric. Technol. 2023, 3, 100069. [Google Scholar] [CrossRef]
- Tamirat, T.W.; Pedersen, S.M.; Ørum, J.E.; Holm, S.H. Multi-stakeholder perspectives on field crop robots: Lessons from four case areas in Europe. Smart Agric. Technol. 2023, 4, 100143. [Google Scholar] [CrossRef]
- Gevorgian, A.; Pernigotto, G.; Gasparella, A. Addressing Data Scarcity in Solar Energy Prediction with Machine Learning and Augmentation Techniques. Energies 2024, 17, 3365. [Google Scholar] [CrossRef]
- Yu, S.; Guo, J.; Zhang, R.; Fan, Y.; Wang, Z.; Cheng, X. A re-balancing strategy for class-imbalanced classification based on instance difficulty. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 70–79. [Google Scholar] [CrossRef]
- Le, V.N.T.; Ahderom, S.; Alameh, K. Performances of the LBP Based Algorithm over CNN Models for Detecting Crops and Weeds with Similar Morphologies. Sensors 2020, 20, 2193. [Google Scholar] [CrossRef]
- Meinen, C.; Rauber, R. Root discrimination of closely related crop and weed species using FT MIR-ATR spectroscopy. Front. Plant. Sci. 2015, 6, 765. [Google Scholar] [CrossRef]
- Rehman, T.U.; Zaman, Q.U.; Chang, Y.K.; Schumann, A.W.; Corscadden, K.W.; Esau, T.J. Optimising the parameters influencing performance and weed (goldenrod) identification accuracy of colour co-occurrence matrices. Biosyst. Eng. 2018, 170, 85–95. [Google Scholar] [CrossRef]
- De Castro, A.I.; Jurado-Expósito, M.; Gómez-Casero, M.T.; López-Granados, F. Applying neural networks to hyperspectral and multispectral field data for discrimination of cruciferous weeds in winter crops. Sci. World J. 2012, 630390. [Google Scholar] [CrossRef]
- Deng, W.; Huang, Y.B.; Zhao, C.J.; Wang, X. Identification of seedling cabbages and weeds using hyperspectral imaging. Int. J. Agric. Biol. Eng. 2015, 8, 65–72. [Google Scholar] [CrossRef]
- Shapira, U.; Herrmann, I.; Karnieli, A.; Bonfil, D.J. Field spectroscopy for weed detection in wheat and chickpea fields. Int. J. Remote Sens. 2013, 34, 6094–6108. [Google Scholar] [CrossRef]
- Eddy, P.; Smith, A.; Hill, B.; Peddle, D.; Coburn, C.; Blackshaw, R. Weed and crop discrimination using hyperspectral image data and reduced bandsets. Can. J. Remote Sens. 2014, 39, 481–490. [Google Scholar] [CrossRef]
- Sapkota, B.; Singh, V.; Cope, D.; Valasek, J.; Bagavathiannan, M. Mapping and Estimating Weeds in Cotton Using Unmanned Aerial Systems-Borne Imagery. Agric. Eng. 2020, 2, 350–366. [Google Scholar] [CrossRef]
- Hall, D.; Dayoub, F.; Perez, T.; McCool, C. A rapidly deployable classification system using visual data for the application of precision weed management. Comput. Electron. Agric. 2018, 148, 107–120. [Google Scholar] [CrossRef]
- Huang, Y.; Lee, M.A.; Thomson, S.J.; Reddy, K.N. Ground-based hyperspectral remote sensing for weed management in crop production. Int. J. Agric. Biol. Eng. 2016, 9, 98–109. [Google Scholar] [CrossRef]
- Fletcher, R.S.; Turley, R.B. Employing Canopy Hyperspectral Narrowband Data and Random Forest Algorithm to Differentiate Palmer Amaranth from Colored Cotton. Am. J. Plant. Sci. 2017, 8, 3258. [Google Scholar] [CrossRef]
- Chen, S.R.; Li, Y.X.; Mao, H.P.; Shen, B.G.; Zhang, Y.Z.; Chen, B. Research on distinguishing weed from crop using spectrum analysis technology. Spectrosc. Spectr. Anal. 2009, 29, 463–466. [Google Scholar]
- Slaughter, D.C.; Giles, D.K.; Fennimore, S.A.; Smith, R.F. Multispectral machine vision identification of lettuce and weed seedlings for automated weed control. Weed Technol. 2008, 22, 378–384. [Google Scholar] [CrossRef]
- Tang, J.; Wang, D.; Zhang, Z.; He, L.; Xin, J.; Xu, Y. Weed identification based on K-means feature learning combined with convolutional neural network. Comput. Electron. Agric. 2017, 135, 63–70. [Google Scholar] [CrossRef]
- Wendel, A.; Underwood, J. Self-supervised weed detection in vegetable crops using ground based hyperspectral imaging. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5128–5135. [Google Scholar] [CrossRef]
- Uríčková, V.; Sádecká, J. Determination of geographical origin of alcoholic beverages using ultraviolet, visible and infrared spectroscopy: A review. Spectrochim. Acta Part. A Mol. Biomol. Spectrosc. 2015, 148, 131–137. [Google Scholar] [CrossRef] [PubMed]
- Akbarzadeh, S.; Paap, A.; Ahderom, S.; Apopei, B.; Alameh, K. Plant discrimination by Support Vector Machine classifier based on spectral reflectance. Comput. Electron. Agric. 2018, 148, 250–258. [Google Scholar] [CrossRef]
- Zhu, D.; Pan, J.; He, Y. Identification methods of crop and weeds based on Vis/NIR spectroscopy and RBF-NN model. Guang Pu Xue Yu Guang Pu Fen Xi Guang Pu 2008, 28, 1102–1106. [Google Scholar]
- De Souza, M.F.; do Amaral, L.R.; de Medeiros Oliveira, S.R.; Coutinho, M.A.N.; Netto, C.F. Spectral differentiation of sugarcane from weeds. Biosyst. Eng. 2020, 190, 41–46. [Google Scholar] [CrossRef]
- Zhang, Y.; Slaughter, D.C.; Staab, E.S. Robust hyperspectral vision-based classification for multi-season weed mapping. ISPRS J. Photogramm. Remote Sens. 2012, 69, 65–73. [Google Scholar] [CrossRef]
- Bakhshipour, A.; Jafari, A. Evaluation of support vector machine and artificial neural networks in weed detection using shape features. Comput. Electron. Agric. 2018, 145, 153–160. [Google Scholar] [CrossRef]
- Wang, S.; Liu, H.; Han, Y.; Chen, J.; Pan, Y.; Cao, Y.; Meng, H.; Zheng, Y. Low-Altitude Remote Sensing Based on Convolutional Neural Network for Weed Classification in Ecological Irrigation Area. IFAC Pap. 2018, 51, 298–303. [Google Scholar] [CrossRef]
- Cheng, B.; Matson, E.T. A feature-based machine learning agent for automatic rice and weed discrimination. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing, Zakopane, Poland, 14–18 June 2015; Springer: Zakopane, Poland, 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Wen, S.; Zhang, H.; Zhang, Y. Accurate Weed Mapping and Prescription Map Generation Based on Fully Convolutional Networks Using UAV Imagery. Sensors 2018, 18, 3299. [Google Scholar] [CrossRef]
- Kokalj, M.; Prikeržnik, M.; Kreft, S. FTIR spectroscopy as a tool to detect contamination of rocket (Eruca sativa and Diplotaxis tenuifolia) salad with common groundsel (Senecio vulgaris) leaves. J. Sci. Food Agric. 2017, 97, 2238–2244. [Google Scholar] [CrossRef] [PubMed]
- 96 Dos Santos Ferreira, A.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection in soybean crops using Conv. Nets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Koger, C.H.; Bruce, L.M.; Shaw, D.R.; Reddy, K.N. Wavelet analysis of hyperspectral reflectance data for detecting pitted morningglory (Ipomoea lacunosa) in soybean (Glycine max). Remote Sens. Environ. 2003, 86, 108–119. [Google Scholar] [CrossRef]
- Jannoura, R.; Brinkmann, K.; Uteau, D.; Bruns, C.; Joergensen, R.G. Monitoring of crop biomass using true colour aerial photographs taken from a remote controlled hexacopter. Biosyst. Eng. 2015, 129, 341–351. [Google Scholar] [CrossRef]
- Okamoto, H.; Murata, T.; Kataoka, T.; Hata, S.I. Plant classification for weed detection using hyperspectral imaging with wavelet analysis. Weed Biol. Manag. 2007, 7, 31–37. [Google Scholar] [CrossRef]
- Sujaritha, M.; Annadurai, S.; Satheeshkumar, J.; Sharan, S.K.; Mahesh, L. Weed detecting robot in sugarcane fields using fuzzy real time classifier. Comput. Electron. Agric. 2017, 134, 160–171. [Google Scholar] [CrossRef]
- Staab, E.; Slaughter, D.; Zhang, Y.; Giles, D. Hyperspectral Imaging System for Precision Weed Control in Processing Tomato. In Proceedings of the American Society of Agricultural and Biological Engineers Annual International Meeting 2009, Reno, NV, USA, 21–24 June 2009; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2009; p. 096635. [Google Scholar] [CrossRef]
- Forouzanmehr, E.; Loghavi, M. Design, development and field evaluation of a map-based variable rate granular fertilizer application control system. Agric. Eng. Int. CIGR J. 2012, 14, 255–264. [Google Scholar]
- Fennimore, S.; Slaughter, D.; Siemens, M.; Leon, R.; Saber, M. Technology for Automation of Weed Control in Specialty Crops. Weed Technol. 2016, 30, 823–837. [Google Scholar] [CrossRef]
- Rasmussen, J.; Nielsen, J.; Garcia-Ruiz, F.; Christensen, S.; Streibig, J.C. Potential uses of small unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 242–248. [Google Scholar] [CrossRef]
- Sanchez, J.; Gallandt, E.R. Functionality and efficacy of Franklin Robotics’ Tertil robotic weeder. Weed Technol. 2021, 35, 166–170. [Google Scholar] [CrossRef]
- Biglia, A.; Grella, M.; Bloise, N.; Comba, L.; Mozzanini, E.; Sopegno, A.; Pittarello, M.; Dicembrini, E.; Alcatrão, L.E.; Guglieri, G.; et al. UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses. Sci. Total Environ. 2022, 845, 157292. [Google Scholar] [CrossRef] [PubMed]
- Korres, N.E.; Burgos, N.R.; Travlos, I.; Vurro, M.; Gitsopoulos, T.K.; Varanasi, V.K.; Salas-Perez, R. New directions for integrated weed management: Modern technologies, tools and knowledge discovery. Adv. Agron. 2019, 155, 243–319. [Google Scholar] [CrossRef]
- Riar, D.S.; Ball, D.A.; Yenish, J.P.; Burke, I.C. Light-activated, sensor-controlled sprayer provides effective postemergence control of broadleaf weeds in fallow. Weed Technol. 2011, 25, 447–453. [Google Scholar] [CrossRef]
- Berge, T.; Goldberg, S.; Kaspersen, K.; Netland, J. Towards machine vision based site-specific weed management in cereals. Comput. Electron. Agric. 2012, 81, 79–86. [Google Scholar] [CrossRef]
- Ruigrok, T.; van Henten, E.; Booij, J.; van Boheemen, K.; Kootstra, G. Application-specific evaluation of a weed-detection algorithm for plant-specific spraying. Sensors 2020, 20, 7262. [Google Scholar] [CrossRef]
- Søgaard, H.T.; Lund, I. Application accuracy of a machine vision-controlled robotic micro-dosing system. Biosyst. Eng. 2007, 96, 315–322. [Google Scholar] [CrossRef]
- Lamm, R.D.; Slaughter, D.C.; Giles, D.K. Precision weed control system for cotton. Trans. ASAE 2002, 45, 231. [Google Scholar] [CrossRef]
- Berenstein, R.; Edan, Y. Automatic Adjustable Spraying Device for Site-Specific Agricultural Application. IEEE Trans. Autom. Sci. Eng. 2018, 15, 641–650. [Google Scholar] [CrossRef]
- Dankhara, F.; Patel, K.; Doshi, N. Analysis of robust weed detection techniques based on the Internet of Things (IoT). Procedia Comput. Sci. 2019, 160, 696–701. [Google Scholar] [CrossRef]
- Shorewala, S.; Ashfaque, A.; Sidharth, R.; Verma, U. Weed Density and Distribution Estimation for Precision Agriculture Using Semi-Supervised Learning. IEEE Access 2021, 69, 27971–27986. [Google Scholar] [CrossRef]
- Wu, X.; Aravecchia, S.; Lottes, P.; Stachniss, C.; Pradalier, C. Robotic weed control using automated weed and crop classification. J. Field Robot. 2020, 37, 322–340. [Google Scholar] [CrossRef]
- Steward, B.L.; Tian, L.F.; Tang, L. Distance–based control system for machine vision–based selective spraying. Trans. ASAE 2002, 45, 1255. [Google Scholar] [CrossRef]
- Midtiby, H.S.; Mathiassen, S.K.; Andersson, K.J.; Jørgensen, R.N. Performance evaluation of a crop/weed discriminating microsprayer. Comput. Electron. Agric. 2011, 77, 35–40. [Google Scholar] [CrossRef]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dørum, J.; Netland, J.; Overskeid, Ø.; Berge, T.W.; Gravdahl, J.T. Robotic in-row weed control in vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Bogue, R. Robots poised to revolutionise agriculture. Ind. Robot. Int. J. 2016, 43, 450–456. [Google Scholar] [CrossRef]
- Bratovcic, A. Exploring non-chemical methods for sustainable weed management. Int. J. Agric. Environ. Res. 2025, 11, 129–153. [Google Scholar] [CrossRef]
- Fan, X.; Chai, X.; Zhou, J.; Sun, T. Deep learning based weed detection and target spraying robot system at seedling stage of cotton field. Comput. Electron. Agric. 2023, 214, 108317. [Google Scholar] [CrossRef]
- Underwood, J.P.; Calleija, M.; Taylor, Z.; Hung, C.; Nieto, J.M.G.; Fitch, R.; Sukkarieh, S. Real-time target detection and steerable spray for vegetable crops. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Adamides, G.; Katsanos, C.; Constantinou, I.; Christou, G.; Xenos, M.; Hadzilacos, T.; Edan, Y. Design and development of a semi-autonomous agricultural vineyard sprayer: Human–robot interaction aspects. J. Field Robot. 2017, 34, 1407–1426. [Google Scholar] [CrossRef]
- Naio Tecnologies. Dino-Autonomous Mechanical Weeding Robot. 2020. Available online: https://www.naio-technologies.com/wp-content/uploads/2019/04/brochure-DINO-ENGLISH-HD.pdf (accessed on 20 February 2021).
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Lehnert, C.; Perez, T. Robot for weed species plant-specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Choi, K.H.; Han, S.K.; Han, S.H.; Park, K.H.; Kim, K.S.; Kim, S. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields. Comput. Electron. Agric. 2015, 113, 266–274. [Google Scholar] [CrossRef]
- Uchida, H.; Hunaki, T. Development of a remote control type weeding machine with stirring chains for a paddy field. In Proceedings of the 22nd International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR), Kuala Lumpur, Malaysia, 26–28 August 2019; pp. 61–68. [Google Scholar] [CrossRef]
- Mitsui, T.; Kobayashi, T.; Kagiya, T.; Inaba, A.; Ooba, S. Verification of a Weeding Robot “AIGAMO-ROBOT” for Paddy Fields. J. Robot. Mechatron. 2008, 20, 228–233. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Liang, Y.; Blackmore, S. Development of a prototype robot and fast path-planning algorithm for static laser weeding. Comput. Electron. Agric. 2017, 142, 494–503. [Google Scholar] [CrossRef]
- Yaseen, M.U.; Long, J.M. Laser Weeding Technology in Cropping Systems: A Comprehensive Review. Agronomy 2024, 14, 2253. [Google Scholar] [CrossRef]
- Andreasen, C.; Scholle, K.; Saberi, M. Laser weeding with small autonomous vehicles: Friends or foes? Front. Agron. 2022, 4, 841086. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Kanade, P.; Prasad, J.P. Arduino based Machine Learning and IoT Smart Irrigation System. Int. J. Soft. Comput. Eng. 2021, 10, 1–5. [Google Scholar] [CrossRef]
- Mathiassen, S.K.; Bak, T.; Christensen, S.; Kudsk, P. The Effect of Laser Treatment as a Weed Control Method. Biosyst. Eng. 2006, 95, 497–505. [Google Scholar] [CrossRef]
- Delbert, C. This Badass Robot Uses Lasers to Slay 100,000 Weeds per Hour. 2021. Available online: https://www.popularmechanics.com/technology/robots/a36331690/autonomous-farming-robot-kills-weeds/ (accessed on 19 August 2023).
- Gates, D.M.; Keegan, H.J.; Schleter, J.C.; Weidner, V.R. Spectral properties of plants. Appl. Opt. 1965, 4, 11–20. [Google Scholar] [CrossRef]
- Wieliczka, D.M.; Weng, S.; Querry, M.R. Wedge shaped cell for highly absorbent liquids: Infrared optical constants of water. Appl. Opt. 1989, 28, 1714–1719. [Google Scholar] [CrossRef]
- Kaierle, S.; Marx, C.; Rath, T.; Hustedt, M. Find and irradiate—lasers used for weed control. Laser Tech. J. 2013, 10, 44–47. [Google Scholar] [CrossRef]
- Mwitta, C.; Rains, G.C.; Prostko, E. Evaluation of Diode Laser Treatments to Manage Weeds in Row Crops. Agronomy 2022, 12, 2681. [Google Scholar] [CrossRef]
- Symonds, P.; Paap, A.; Alameh, K.; Rowe, J.; Miller, C. A real-time plant discrimination system utilising discrete reflectance spectroscopy. Comput. Electron. Agric. 2015, 117, 57–69. [Google Scholar] [CrossRef]
- Sørensen, C.G.; Madsen, N.A.; Jacobsen, B.H. Organic farming scenarios: Operational analysis and costs of implementing innovative Technologies. Biosyst. Eng. 2005, 91, 127–137. [Google Scholar] [CrossRef]
- Pérez-Ruíz, M.; Slaughter, D.C.; Fathallah, F.A.; Gliever, C.J.; Miller, B.J. Co-robotic intra-row weed control system. Biosyst. Eng. 2014, 126, 45–55. [Google Scholar] [CrossRef]
- Pedersen, S.M.; Fountas, S.; Have, H.; Blackmore, B.S. Agricultural robots—System analysis and economic feasibility. Precis. Agric. 2006, 7, 295–308. [Google Scholar] [CrossRef]
- Shang, L.; Pahmeyer, C.; Heckelei, T.; Rasch, S.; Storm, H. How much can farmers pay for weeding robots? A Monte Carlo simulation study. Precis. Agric. 2023, 24, 1712–1737. [Google Scholar] [CrossRef] [PubMed]
- Heisel, T.; Schou, J.; Christensen, S.; Andreasen, C. Cutting weeds with a CO2 laser. Weed Res. 2001, 41, 19–29. [Google Scholar] [CrossRef]
- Coleman, G.; Betters, C.; Squires, C.; Leon-Saval, S.; Walsh, M. Low Energy Laser Treatments Control Annual Ryegrass (Lolium rigidum). Front. Agron. 2021, 2, 601542. [Google Scholar] [CrossRef]
- Gao, X.; Li, J.; Fan, L.; Zhou, Q.; Yin, K.; Wang, J.; Song, C.; Huang, L.; Wang, Z. Review of wheeled mobile robots’ navigation problems and application prospects in agriculture. IEEE Access 2018, 6, 49248–49268. [Google Scholar] [CrossRef]
- Yépez-Ponce, D.F.; Salcedo, J.V.; Rosero-Montalvo, P.D.; Sanchis, J. Mobile robotics in Smart Farming: Current trends and applications. Front. Artif. Intell. 2023, 6, 1213330. [Google Scholar] [CrossRef] [PubMed]
- Vasconcelos, G.J.; Costa, G.S.; Spina, T.V.; Pedrini, H. Low-Cost Robot for Agricultural Image Data Acquisition. Agriculture 2023, 13, 413. [Google Scholar] [CrossRef]
- Liu, B.; Zhou, J. Digital Literacy, Farmers’ Income Increase and Rural Internal Income Gap. Sustainability 2023, 15, 11422. [Google Scholar] [CrossRef]
- Gong, S.; Sun, Z.; Wang, B.; Yu, Z. Could Digital Literacy Contribute to the Improvement of Green Production Efficiency in Agriculture? SAGE Open 2024, 14, 21582440241232789. [Google Scholar] [CrossRef]
- Marx, C.; Barcikowski, S.; Hustedt, M.; Haferkamp, H.; Rath, T. Design and application of a weed damage model for laser-based weed control. Biosyst. Eng. 2012, 113, 148–157. [Google Scholar] [CrossRef]
- Raja, R.; Nguyen, T.T.; Slaughter, D.C.; Fennimore, S.A. Real-time robotic weed knife control system for tomato and lettuce based on geometric appearance of plant labels. Biosyst. Eng. 2020, 194, 152–164. [Google Scholar] [CrossRef]
- Rask, A.M.; Kristoffersen, P. A review of non-chemical weed control on hard surfaces. Weed Res. 2007, 47, 370–380. [Google Scholar] [CrossRef]
- Zingsheim, M.L.; Döring, T.F. What weeding robots need to know about ecology. Agric. Ecosyst. Environ. 2024, 364, 108861. [Google Scholar] [CrossRef]
- Romeo, J.; Guerrero, J.M.; Montalvo, M.; Emmi, L.; Guijarro, M.; Gonzalez-de-Santos, P.; Pajares, G. Camera sensor arrangement for crop/weed detection accuracy in agronomic images. Sensors 2013, 13, 4348–4366. [Google Scholar] [CrossRef] [PubMed]
- Tomy, M.; Lacerda, B.; Hawes, N.; Wyatt, J.L. Battery charge scheduling in long-life autonomous mobile robots via multi-objective decision making under uncertainty. Rob. Auton. Syst. 2020, 133, 103629. [Google Scholar] [CrossRef]
- Dewi, T.; Sukwadi, R.; Wahju, M.B. Design and Performance of Solar-Powered Surveillance Robot for Agriculture Application. Kinet. Game Technol. Inf. Syst. Comput. Netw. Comput. Electron. Control. 2023, 8, 615–622. [Google Scholar] [CrossRef]
- Hussain, A.; Fatima, H.S.; Zia, S.M.; Hasan, S.; Khurram, M.; Stricker, D.; Afzal, M.Z. Development of cost-effective and easily replicable robust weeding machine—Premiering precision agriculture in Pakistan. Machines 2023, 11, 287. [Google Scholar] [CrossRef]
- Spykman, O.; Gabriel, A.; Ptacek, M.; Gandorfer, M. Farmers’ perspectives on field crop robots–Evidence from Bavaria, Germany. Comput. Electron. Agric. 2021, 186, 106176. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; Torres-Sánchez, J.; Peña, J.M.; Ramírez, P.; Castillejo-González, I.L. Automatic UAV-based detection of Cynodon dactylon for site-specific vineyard management. PLoS ONE 2019, 14, e0218132. [Google Scholar] [CrossRef]
- Rasmussen, J.; Nielsen, J.; Streibig, J.C.; Jensen, J.E.; Pedersen, K.S.; Olsen, S.I. Pre-harvest weed mapping of Cirsium arvense in wheat and barley with of-the-shelf UAVs. Precis. Agric. 2019, 20, 983–999. [Google Scholar] [CrossRef]
- Gao, J.; Liao, W.; Nuyttens, D.; Lootens, P.; Vangeyte, J.; Pizurica, A.; He, Y.; Pieters, J.G. Fusion of pixel and object-based features for weed mapping using unmanned aerial vehicle imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 43–53. [Google Scholar] [CrossRef]
- Peña, J.M.; Torres-Sánchez, J.; de Castro, A.I.; Kelly, M.; López-Granados, F. Weed mapping in early-season maize fields using object-based analysis of unmanned aerial vehicle (UAV) images. PLoS ONE 2013, 8, e77151. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; De Castro, A.I.; Peña-Barragán, J.M. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef] [PubMed]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. Agric. 2021, 8, 1–11. [Google Scholar] [CrossRef]
- Mazzia, V.; Comba, L.; Khaliq, A.; Chiaberge, M.; Gay, P. UAV and machine learning based refinement of a satellite-driven vegetation index for precision agriculture. Sensors 2020, 20, 2530. [Google Scholar] [CrossRef]
- Zou, K.; Chen, X.; Zhang, F.; Zhou, H.; Zhang, C. A field weed density evaluation method based on UAV imaging and modified U-Net. Remote Sens. 2021, 13, 310. [Google Scholar] [CrossRef]
- Yang, T.; Zhu, S.; Zhang, W.; Zhao, Y.; Song, X.; Yang, G.; Yao, Z.; Wu, W.; Liu, T.; Sun, C.; et al. Unmanned Aerial Vehicle-Scale Weed Segmentation Method Based on Image Analysis Technology for Enhanced Accuracy of Maize Seedling Counting. Agriculture 2024, 14, 175. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; Partel, V.; Costa, L. Agroview: Cloud-based application to process, analyze and visualize UAV-collected data for precision agriculture applications utilizing artificial intelligence. Comput. Electron. Agric. 2020, 174, 105457. [Google Scholar] [CrossRef]
- Mink, R.; Dutta, A.; Peteinatos, G.G.; Sökefeld, M.; Engels, J.J.; Hahn, M.; Gerhards, R. Multi-Temporal Site-Specific Weed Control of Cirsium arvense (L.) Scop. and Rumex crispus L. in Maize and Sugar Beet Using Unmanned Aerial Vehicle Based Mapping. Agriculture 2018, 8, 65. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Pelosi, F.; Castaldi, F.; Casa, R. Operational Unmanned Aerial Vehicle Precision Agriculture Assisted Post-Emergence Herbicide Patch Spraying in Maize: A Field Study; Wageningen Academic Publishers: Wageningen, The Netherlands, 2015; pp. 159–166. [Google Scholar] [CrossRef]
- Vijayakumar, S.; Madireddy, H.; Bhusarapu, S.C.; Kumar, R.M.; Sundaram, R.M. Drone application in rice cultivation: Experiences from ICAR-IIRR trails. Indian Farming 2022, 72, 3–6. [Google Scholar]
- Kumar, S.V.; Nayak, A.K.; Poonam, A.; Aravindan, S.; Khanam, R. Unmanned aerial vehicle (UAV) and its application in Indian agriculture: A perspective. Indian Farming 2020, 70, 34–37. [Google Scholar]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize. Precis. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- Nikolić, N.; Rizzo, D.; Marraccini, E.; Gotor, A.A.; Mattivi, P.; Saulet, P.; Persichetti, A.; Masin, R. Site and time-specific early weed control is able to reduce herbicide use in maize-a case study. Ital. J. Agron. 2021, 16, 1780. [Google Scholar] [CrossRef]
- Paul, R.A.I.; Arthanari, P.M.; Pazhanivelan, S.; Kavitha, R.; Djanaguiraman, M. Drone-based herbicide application for energy saving, higher weed control and economics in direct-seeded rice (Oryza sativa). Indian J. Agric. Sci. 2023, 93, 704–709. [Google Scholar] [CrossRef]
- Quan, X.; Guo, Q.; Ma, J.; Doluschitz, R. The economic effects of unmanned aerial vehicles in pesticide application: Evidence from Chinese grain farmers. Precis. Agric. 2023, 24, 1965–1981. [Google Scholar] [CrossRef]
- Ruzlan, K.A.C.; Bin Bakar, S.A.; Manan, C.A.H.C.; Noor, M.K.A.M.; Abd Latif, M.R.B.; Abidin, C.M.R.Z.; Jusoh, M.; Hamdani, M.S.A. Weed control efficiency of unmanned aerial vehicle spray in replanting oil palm plantation areas. Weed Sci. 2025, 73, e37. [Google Scholar] [CrossRef]
- Cavalaris, C.; Tagarakis, A.C.; Kateris, D.; Bochtis, D. Cost analysis of using UAV sprayers for olive fruit fly control. Agric. Eng. 2023, 5, 1925–1942. [Google Scholar] [CrossRef]
- Pranaswi, D.; Jagtap, M.P.; Asewar, B.V.; Gokhale, D.N.; Shinde, G.U. Weed control efficiency with herbicide application by the combination of Drone and Knapsack sprayer in wheat (Triticum aestivum L.). The Pharm. Innov. J. 2022, 11, 741–744. [Google Scholar]
- Cao, Z.; Kooistra, L.; Wang, W.; Guo, L.; Valente, J. Real-time object detection based on UAV remote sensing: A systematic literature review. Drones 2023, 7, 620. [Google Scholar] [CrossRef]
- Catala-Roman, P.; Segura-Garcia, J.; Dura, E.; Navarro-Camba, E.A.; Alcaraz-Calero, J.M.; Garcia-Pineda, M. AI-based autonomous UAV swarm system for weed detection and treatment: Enhancing organic orange orchard efficiency with agriculture 5.0. Internet Things 2024, 28, 101418. [Google Scholar] [CrossRef]
- Tetila, E.C.; Moro, B.L.; Astolfi, G.; da Costa, A.B.; Amorim, W.P.; de Souza Belete, N.A.; Pistori, H.; Barbedo, J.G.A. Real-time detection of weeds by species in soybean using UAV images. Crop Prot. 2024, 184, 106846. [Google Scholar] [CrossRef]
- Singh, V.; Bagavathiannan, M.; Chauhan, B.S.; Singh, S. Evaluation of current policies on the use of unmanned aerial vehicles in Indian agriculture. Curr. Sci. 2019, 117, 25–29. [Google Scholar] [CrossRef]
- Vijayakumar, S.; Aravindan, S.; Saravanane, P.; Sivashankari, M. Unmanned aerial vehicles policies evaluation and suggestion to boost its agriculture application in India. Kerala Karshakan E-J. 2021, 8, 6–8. [Google Scholar]
- Chen, P.; Douzals, J.P.; Lan, Y.; Cotteux, E.; Delpuech, X.; Pouxviel, G.; Zhan, Y. Characteristics of unmanned aerial spraying systems and related spray drift: A review. Front. Plant Sci. 2022, 13, 870956. [Google Scholar] [CrossRef]
- Choi, H.W.; Kim, H.J.; Kim, S.K.; Na, W.S. An overview of drone applications in the construction industry. Drones 2023, 7, 515. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of unmanned aerial vehicle flight height on droplet distribution, drift and control of cotton aphids and spider mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef]
- GOI. Government of India, Ministry of Agriculture & Farmers Welfare. “Namo Drone Didi”. 2023. Available online: https://namodronedidi.php-staging.com/ (accessed on 21 October 2024).
- Press Information Bureau. Incentive of Rs. 120 Crore Has Been Provided for Indian Manufacturers of Drone and Drone Components under PLI Scheme. Government of India, Ministry of Civil Aviation. 2021. Available online: https://pib.gov.in/PressReleasePage.aspx?PRID=1779057 (accessed on 21 November 2024).

| Algorithms | Sensor | Locomotion | Robot Name | Crop | Reference |
|---|---|---|---|---|---|
| Faster Region-CNN | RGB | - | Prototype | Cotton | [122] |
| Excess Green minus Excess Red | Lidar, spherical camera, hyperspectral and thermal infrared cameras | Four-wheel steering | LadyBird | Lettuce, Cauliflower, and Broccoli | [123] |
| ML algorithms | RGB, hyperspectral and thermal | Four-wheel steering | RIPPA | Beetroot, onion and other vegetables | [120] |
| FDA and GDA | RGB, and laser | Four-wheel driving | Robotic sprayer | Grapes | [113] |
| 2D and 3D algorithms | Lidar, radar, and cameras | Four-wheel driving | AgriRobot, SAVSAR | Vineyard | [124] |
| DL based YOLOv5n | RGB camera | Differential-Drive Mobile Robot | Tobacco | [33] | |
| NA | Laser, RGB, and multispectral | Four-wheel steering | BoniRob | Sugar beet | [125] |
| Bayesian formulation, unscented Kalman filter | RGB, Visual Odometry | Two-wheel steering | Asterix | Carrot | [119] |
| AI powered auto navigation system | RGB camera | 95% and 10 ha/day | AVO | Rapeseed, beans and cotton | [121] |
| Sensor | Name | Crop | Algorithm | Power Source | Accuracy | Speed | Locomotion | References |
|---|---|---|---|---|---|---|---|---|
| RGB | AgBotII | Thistle, Feather top, and Rhodes | LBP and covariance feature | Battery | 92.3% | 5–10 km/h | Four-wheel steering | [126] |
| RGB | Dino | Vegetables in row and on beds | - | Battery | 90.6% | 3 to 4 km/h and 3 to 5 ha/day | Four-wheel steering | [115] |
| RGB | K-Weedbot | Rice field | Hough transform | Battery and solar | 80% | 0.2 m/s | Four-wheel steering | [127] |
| RGB | Weeding robot 1 | Broccoli and lettuce | RANSAC | Battery and solar | - | 20 m/min | Four-wheel driving | [128] |
| RGB, LiDAR | Oz | Vegetables, Nurseries, and Horticulture | - | Battery | cm level | 1000 m2/h | Four-wheel driving | [125] |
| RGB | Ted | Grape | - | Solar | - | 5 km/h and 5 ha/day | Four-wheel steering | |
| RGB | VITIROVER | Soil grass | - | Primarily solar, but also utilizes batteries | 2–3 cm from the trunk | 500 m/h | Four-wheel driving | [125] |
| Laser, RGB, and multispectral | BoniRob | Sugar beet | - | Battery and solar | 91% | 5 km/h | Four-wheel steering | [125] |
| Capacitive and azimuth sensors | Tertill | Parks and Gardens | - | Solar | 80–95% | 0.5–1.5 ac/h | Four-wheel driving | [105] |
| Capacitive sensors | AIGAMO-ROBOT | Rice | - | Battery and solar | ±35 mm or 90–95% | ±35 mm | Track | [129] |
| Capacitive sensors | Weeding robot 2 | - | - | 71% | 500 m/s | Four-wheel driving | [128] | |
| Capacitive sensors | Weeding robot 3 | - | - | - | - | Boat |
| Crop | Weeds Identified | Algorithm | Accuracy (%) | References |
|---|---|---|---|---|
| RGB | ||||
| Barley, Sugar beet | Echinochloa crus-galli, Avena fatua, Alopecurus myosuroides, Chenopodium album | CA | 100 | [72] |
| Chickpea | Broadleaf weeds, grass weeds | GDA | 95 | [76] |
| Cotton | Echinochloa crus-galli | DA | 100 | [82] |
| Maize | Ambrosia artemisiifolia, Amaranthus retroflexus, Echinochloa crus-galli, Setaria glauca, Capsella bursa-pastoris, Chenopodium album, Panicum capillare, Digitaria sanguinalis, Avena fatua, Alopecurus myosuroides, Beta vulgaris | CA | 100 | [72] |
| Rice | Echinochloa crus-galli | SVM | 97 | [87] |
| Soybean | Eleusine indica, Alternanthera philoxeroides, Amaranthus palmeri | NN | 100 | [88] |
| Sugarcane | Commelina benghalensis, Brachiaria brizantha, Brachiaria decumbens, Megathyrsus maximus, Convolvulus arvensis, Ageratum conyzoides, Crotalaria juncea | RF | 97 | [89] |
| Soybean | Amaranthus palmeri, Echinochloa crus-galli, Digitaria sanguinalis, | LDA | >90 | [94] |
| Multispectral | ||||
| Barley | Brassica napus, Raphanus sativus | CNN | 99 | [71] |
| Cotton | Amaranthus palmeri, Leptochloa chinensis | RF | 85.8 | [78] |
| Maize, Sugar beet | Cirsium arvense, Xanthium strumarium, Geranium sylvaticum, Amaranthus graecizans, Sorghum halepense, Humulus japonicus, Xanthium sibiricum, Amaranthus palmeri, Convolvulus arvensis, Chenopodium album, Digitaria sanguinalis, Brassica nigra, Batis maritima, Alopecurus myosuroides, Sinapis arvensis, Galium aparine, Stellaria media, Apera spica-venti, Tripleurospermum inodorum, Capsella bursa-pastoris | SVM, ANN | 96.7 | [91] |
| CNN | 98.2 | |||
| Peanut, Wheat | Chenopodium album, Humulus scandens, Xanthium strumarium, Xanthium sibiricum | CNN | 95.6 | [92] |
| Cotton, Tomato | Cyperus iria, Leptochloa chinensis | CNN | 99.3 | [30] |
| Soybean | Digitaria sanguinalis, Convolvulus arvensis, Echinochloa crus-galli, Amaranthus palmeri | CNN | 97 | [96] |
| Sugarcane | Ipomoea alba, Convolvulus arvinse, Coccinia grandis, Trianthema portulacastrum, Amaranthus viridis, Cyanotis axillaris, Physalis minima, Commelina bengalensis, Cyperus rotundus | Fuzzy real-time classifier | 92.9 | [100] |
| Sunflower | Tripleurospermum inodorum, Capsella bursa-pastoris, Apera spica-venti, Geranium sylvaticum, Alopecurus myosuroides, Sinapis arvensis, Galium aparine, Stellaria media, Chenopodium album, Amaranthus palmeri, Brassica nigra, Convolvulus arvensis, Batis maritima | CNN | 92.9 | [84] |
| Hyperspectral | ||||
| Broad bean | Cruciferous weeds | ANN | 100 | [74] |
| Canola, Pea, wheat | Amaranthus retroflexus, Avena fatua | ANN | 94 | [77] |
| Cotton | Pennisetum villosum, Sonchus oleraceus, Avena fatua | CNN | 97 | [79] |
| Lolium perenne | LDA | >90 | [80] | |
| Amaranthus palmeri | RF | 94.4 | [81] | |
| Maize | Convolvulus arvinse, Rumex crispus, Echinochloa crus-galli, Digitaria sanguinalis, Cirsium arvense, Trapa natans, Ipomoea spp., Polymeria spp., Ranunculus repens, Amaranthus retroflexus, Chenopodium album, Sinapis arvensis, Stellaria media, Taraxacum spp., Poa annua, Medicago lupulina, Ranunculus repens, Cyperus esculentus, Sonchus oleraceus, Polygonum persicaria, Urtica dioica, Oxalis europaea | SVM, LDA | >98.4 | [85] |
| MoG | 100 | [50] | ||
| Rice | Echinochloa crus-galli, Oryza sativa f. spontanea | RF, SVM | 100 | [51] |
| Soybean | Ipomoea purpurea, Lolium perenne | Haar mother wavelet | 100 | [97] |
| Sugar beet | Polygonum convolvulus, Equisetum arvense, Setaria viridis, Stellaria media | LDA | 97.3 | [99] |
| Country/ Region | Regulatory Body | Approx. Number of UAV Training and Certification Organizations | Number of UAV Pilot Licenses Issued | Guideline for UAV Registration | Guideline for UAV Pilot License | Minimum Age to Become UAV Pilot |
|---|---|---|---|---|---|---|
| India | Directorate General of Civil Aviation (DGCA) | 157 | 12,432 remote pilot certificates (RPC) issued as of Feb 2025. | All drone except nano category Total 29,756 UAVs registered | UAV weighing > 250 g | 18 |
| USA | Federal Aviation Administration (FAA) | 800 | 427,335 certificated remote pilots | UAVs weighing > 250 g drone >1 million UAVs registered as of January 2025 | Remote pilot certificate to fly a drone for commercial purposes | 16 |
| China | Civil Aviation Administration of China (CAAC) | 200+ | 194,000 people hold drone pilot certificates till 2023. | UAVs weighing > 250 g 1.875 million registered UAVs till June 2024 | Any drone weighing >7 kg | 16 |
| Australia | Civil Aviation Safety Authority (CASA) | Dozens | Remote Pilot License (RePL) | All UAVs used for business regardless of its weight | UAV weighing > 2 kg | 16 |
| European Union | European Union Aviation Safety Agency (EASA) | Hundreds (across member states) | Certificate based on risk category | UAVs weighing > 250 g | UAV weighing > 250 g | 16 |
| Philippines | Civil Aviation Authority of the Philippines (CAAP) | 40 | NA | UAVs weighing 7 kg and above | UAV weighing > 7 kg | 18 |
| Thailand | Civil Aviation Authority of Thailand (CAAT) | NA | NA | UAVs weighing 2 kg and above 130,000 registered UAV till October 2024 | UAV weighing 25 kg and above | 20 |
| Japan | Japan Civil Aviation Bureau (JCAB) | NA | NA | UAVs weighing 100 g | UAV weighing > 25 kg | 16 |
| South Korea | Ministry of Land, Infrastructure, and Transport (MOLIT) | NA | Approx 31,300 certified UAV pilot in 2021 | UAVs weighing > 250 g 138,000 registered UAVs as of May 2023 | UAV weighing 12 kg | 18 |
| South Africa | South African Civil Aviation Authority (SACAA) | 23 | 83 registered operators and 1818 UAV pilots | Any drone that is used for commercial purposes Approx 50,000 UAVs registered | UAV weighing > 7 kg | 18 |
| Nigeria | Nigerian Civil Aviation Authority (NCAA) | NA | NA | UAVs weighing > 250 g | UAV weighing > 25 kg | 16 |
| Kenya | Kenya Civil Aviation Authority (KCAA) | 12 | 1200 licensed UAV pilots | All UAVs used for commercial purposes | UAV weighing > 25 kg | 18 |
| Brazil | National Civil Aviation Agency (ANAC) | NA | NA | UAVs weighing > 250 g | UAV weighing > 25 kg | 18 |
| Argentina | National Civil Aviation Administration (ANAC) | NA | NA | UAVs weighing > 500 g | UAV weighing > 500 g | 18 |
| Bottleneck | Potential Solutions | Responsible Actors |
|---|---|---|
| Complex and restrictive UAV regulations | Streamline permitting processes, establish online licensing platforms, harmonize regulations with international standards. | Policy/Government |
| Limited availability of authorized drone pilot training institutes | Increase funding for and accreditation of training centers, develop online training modules, incentivize private sector involvement in training. | Policy/Government, Training/Education Institutions, Industry Associations |
| Inadequate adherence to safety standards | Develop and disseminate clear safety guidelines and SOPs, implement stricter enforcement, integrate safety training into pilot programs. | Policy/Government, Industry Associations, Training/Education Institutions |
| Limited payload capacity | Invest in R&D for lighter and more efficient materials, optimize UAV design, explore multi-UAV systems for larger payloads. | Engineering/Manufacturing, AI Research/Development |
| Short battery life | Advance battery technology (higher energy density, faster charging), explore alternative power sources (e.g., fuel cells), optimize flight planning and energy management. | Engineering/Manufacturing, AI Research/Development |
| High initial investment and operational costs | Implement targeted subsidy programs, promote UAV leasing/hiring services, incentivize local manufacturing, reduce maintenance requirements through improved design. | Policy/Government, Engineering/Manufacturing, Financial Institutions, Service Providers |
| Weather dependency | Develop more robust UAV designs for varied weather, integrate advanced weather forecasting into mission planning, optimize spraying schedules (early morning/late evening). | Engineering/Manufacturing, AI Research/Development |
| Concerns about chemical drift | Develop advanced spray nozzle designs, optimize flight parameters (lower altitude, controlled speed), utilize drift prediction algorithms, implement buffer zones. | Engineering/Manufacturing, AI Research/Development, Industry Associations, Farmers/End-Users |
| Lack of specialized skills among farmers | Develop accessible training programs (workshops, online courses, demonstrations), integrate UAV operation into agricultural extension services, target youth. | Training/Education Institutions, Policy/Government, NGOs |
| Lack of SOPs | Facilitate collaboration among researchers, industry experts, and regulatory bodies to develop crop- and region-specific SOPs, disseminate best practices. | Industry Associations, Policy/Government, Research Institutions |
| High Impact | Low Impact | |
|---|---|---|
| High Feasibility | (Quick Wins) Streamline permitting processes; increase funding for/accreditation of training centers; develop and disseminate clear safety guidelines/SOPs; promote UAV leasing/hiring services; develop accessible farmer training programs; facilitate collaboration for SOP development. | (Low Effort, Low Gain) Increase awareness campaigns (general); explore multi-UAV systems (initial stages without robust coordination); integrate basic weather forecasts into planning. |
| Low Feasibility | (Strategic Initiatives) Harmonize regulations internationally; invest significantly in fundamental battery technology advancements; implement large-scale subsidy programs; develop fully autonomous, fail-safe BVLOS capabilities; achieve significant breakthroughs in lightweight, high-capacity payloads; develop sophisticated drift prediction and mitigation algorithms. | (Re-evaluate) Relax citizenship requirements for training (potential political/security considerations); enforce existing safety standards more strictly (resource intensive without addressing root causes); promote specific nozzle designs without broader context. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vijayakumar, S.; Shanmugapriya, P.; Saravanane, P.; Ramesh, T.; Murugaiyan, V.; Ilakkiya, S. Precision Weed Control Using Unmanned Aerial Vehicles and Robots: Assessing Feasibility, Bottlenecks, and Recommendations for Scaling. NDT 2025, 3, 10. https://doi.org/10.3390/ndt3020010
Vijayakumar S, Shanmugapriya P, Saravanane P, Ramesh T, Murugaiyan V, Ilakkiya S. Precision Weed Control Using Unmanned Aerial Vehicles and Robots: Assessing Feasibility, Bottlenecks, and Recommendations for Scaling. NDT. 2025; 3(2):10. https://doi.org/10.3390/ndt3020010
Chicago/Turabian StyleVijayakumar, Shanmugam, Palanisamy Shanmugapriya, Pasoubady Saravanane, Thanakkan Ramesh, Varunseelan Murugaiyan, and Selvaraj Ilakkiya. 2025. "Precision Weed Control Using Unmanned Aerial Vehicles and Robots: Assessing Feasibility, Bottlenecks, and Recommendations for Scaling" NDT 3, no. 2: 10. https://doi.org/10.3390/ndt3020010
APA StyleVijayakumar, S., Shanmugapriya, P., Saravanane, P., Ramesh, T., Murugaiyan, V., & Ilakkiya, S. (2025). Precision Weed Control Using Unmanned Aerial Vehicles and Robots: Assessing Feasibility, Bottlenecks, and Recommendations for Scaling. NDT, 3(2), 10. https://doi.org/10.3390/ndt3020010