1. Introduction
Software development has been recognized, for decades, as one of the most challenging engineering activities [
1]. This is why software modeling has gained importance as a discipline that offers languages, methods and methodologies to address the complexity of software development [
2]. Software modeling is then a broad field, with a large tradition, in which research advances are usually adopted by the industry for the sake of improving development practices. Software modeling addresses, among others, functional and non-functional requirements [
3], from the early stages until deployment and maintenance. This work focuses on the modeling of non-functional requirements, early in the life cycle, in particular, the dependability property of the software. Laprie et al. defined dependability as “the ability of a system to avoid failures that are more frequent and more severe than acceptable” [
4]. Dependability consists of a set of non-functional properties (NFPs) [
4]:
Availability, the readiness for correct service;
Reliability, the continuity of correct service;
Safety, the absence of catastrophic consequences on the users and environment;
Integrity, the absence of improper system alterations;
Maintainability, the ability to undergo modifications and repairs.
The target of this paper is practitioners in the real-time domain. In particular, the goal is to present an approach for modeling the dependability view of a software system, using well-established languages. A modeling approach needs to make assumptions for, at least, the modeling paradigm and the modeling language to use. For the former, the work considers the model-driven development (MDD) paradigm [
5,
6], while for the latter, it uses the unified modeling language [
7] (UML). Other paradigms and languages can be useful for modeling software dependability, such as SysML [
8]. Although the concepts of dependability used in this work are quite general and can be applied with other paradigms, the modeling approach that we follow is specific for MDD and UML. An accurate modeling of the dependability view of a system will eventually lead to a successful system dependability analysis. In this sense, the MDD paradigm offers techniques to automatically transform software dependability models into formal dependability models, e.g., fault trees [
9] or Petri nets [
10]. The latter models have the ability to be mathematically analyzed. Therefore, modeling and analysis are the basis for the dependability assessment of the software systems [
11].
The literature contains numerous works that address the dependability modeling of software systems. However, very few of these works consider the five NFPs comprehensively, as in [
12]. Leveson [
13] proposed one of the seminal works in the field, concretely addressing the safety NFP. Initial works that started using UML, or variants thereof, were devoted to safety [
14] and reliability [
15,
16,
17,
18]; some of these works also consider MDD. It is also worth mentioning works that use the Palladio component model [
19] (PCM) rather than UML, such as [
20] for reliability prediction. Formal approaches have also been proposed [
21]. We can cite the following recent approaches in the field. In the industrial control systems area, Zhou et al. [
22] presented a DSML for dependability modeling based on MDD and the IEC 61 499 [
23] standard. Additionally, Boyer et al. [
24] discussed a generic framework for the dependability assessment, but without a concrete proposal of modeling language. Aizpurua et al. [
25] focused on the modeling and analysis of repairable systems, an interesting and hot topic in the dependability domain, proposing a method and a tool for model-based synthesis of dependability evaluation, whose approach is based on HiP-HOPS [
26]. Finally, recent surveys [
27,
28] clarified the state of the art in NFP modeling within the MDD paradigm.
The approach described in this work is common in MDD, as it uses UML profiles [
7]. A UML profile is a mechanism, provided by the very same UML, for extending its semantics. In this regard, we use the dependability analysis and modeling (DAM) profile [
12]. DAM is based on MARTE (Modeling and Analysis of Real-Time and Embedded systems ) [
29], a standard OMG (Object Management Group,
https://omg.org, accessed on 10 March 2022) profile. In fact, UML-DAM provides a powerful modeling framework for dependability. This work aims at offering a guide and a blue-print for practitioners to model dependability using UML-DAM. For this purpose, we use a case study taken from the literature, that will help in their guidance. The paper makes the case for the dependability modeling in the real-time and embedded systems domain (RTES).
Summarizing, this work is a contribution aimed at practitioners, more specifically at software developers in the real-time domain, who need to introduce dependability aspects in their systems. In this regard, the work digests information from the literature to offer the following:
An understanding of how UML can be tailored for modeling software in specific domains.
A review of MARTE to understand its architecture and capabilities for modeling NFPs.
A guide of the extensions offered by DAM for modeling dependability.
The rest of the paper is organized as follows.
Section 2 recalls the UML profile concept.
Section 3 presents the MARTE profile.
Section 4 summarizes DAM, offering a guide to understand and use the concepts needed for dependability modeling.
Section 5 presents a case study that illustrates the use of DAM.
2. Domain-Specific Modeling with UML
As a general purpose modeling language (GPML), UML allows to model systems in many different application domains [
30]. Quoting the document [
7], “UML is a language with a very broad scope that covers a large and diverse set of application domains. Not all of its modeling capabilities are necessarily useful in all domains or applications”. On the other hand, a domain-specific modeling language (DSML) enables engineers to model in application-specific domains [
31,
32], by capturing essential concepts of such a domain and offering the appropriate syntax to represent them. In this way, the engineer is freed from learning modeling concepts that are not relevant to his/her work. The solution that UML advocates for is known as the
UML profiling mechanism [
7], which means to create a DSML on top of UML [
33]. MARTE [
29,
34] (modeling and analysis of real-time and embedded systems) is a standard UML profile that supports the design, verification and validation of RTES. A UML model constructed with the MARTE profile is called a UML-MARTE model.
The verification and validation of a real-time system is performed by analyzing its fundamental properties, such as schedulability, performance and dependability. MARTE provides the concepts needed to carry out schedulability and performance analyses, while the DAM profile addresses the dependability analysis. Hence, the DAM profile is a DSML for modeling the dependability of software systems. All these kinds of analyses (schedulability, performance and dependability) need to be performed on formal models. However, UML is not a formal language, and neither is MARTE nor DAM. Therefore, we need to transform a UML-MARTE model, or UML-DAM model, into a formal model, say, for example, a Petri net [
10] or a fault tree [
9]. There are many works in the literature addressing the topic of transforming UML models into formal models; however, this issue is not in the scope of this paper. We address in this work the dependability modeling of software systems but not its analysis. Nevertheless, the reader should keep in mind that the modeling style offered by MARTE and DAM is useful for a subsequent analysis of these three fundamental properties. In fact, MDD offers the technology needed for addressing automatic transformations from UML-DAM models to mathematical models.
Summarizing, the benefits of using the MARTE and DAM profiles for software modeling identified in [
29] are as follows:
Providing a common way of modeling both hardware and software aspects of a system in order to improve the communication between developers.
Enabling interoperability between development tools used for specification, design, verification, code generation, etc.
Fostering the construction of models that may be used to make quantitative predictions regarding real-time and embedded features of systems by taking into account both hardware and software characteristics.
These benefits were extracted from [
29], where they are enounced for the real-time domain specifically.
Basic Concepts on UML and UML Profiling
In the following, we describe the basics of UML [
35,
36] and the UML profiling mechanism [
7]. A
UML model consists of different
UML diagrams. One or more diagrams are intended to represent a system view, e.g., static, behavioral or distribution view. In UML, the object diagram and class diagrams are used for the static view, the state machine, interaction, activity and use case diagrams for modeling the dynamic/behavioral concerns, and the component and deployment diagrams for the distribution.
The profiling mechanism builds on the
metamodel concept. A metamodel is a set of related meta-classes. A
meta-class is the abstraction of a set of modeling elements. UML completely describes its metamodel in [
7], then a UML model has to conform with this UML
metamodel. For example, in a UML class diagram, each association belongs to the relationship meta-class of UML since associations share characteristics with other relationships.
The UML profiles package [
7] is useful for creating DSML based on UML. In particular, this package offers mechanisms to extend the UML meta-classes, then the UML metamodel can be tailored to many domains, such as real-time or business process modeling). As explained in [
7], a UML profile is made of a set of stereotypes, a set of tags and a set of related constraints. A
stereotype is just a name that is attached to elements of a UML diagram. Stereotypes have
tags, which can be seen as the attributes of the stereotype. A
constraint expressed in OCL [
37] can be attached to a stereotype definition, describing restrictions for the stereotype.
Figure 1 goes deeper into the profile definition. Therefore, stereotypes are of primary importance and they are applied to model elements directly; this is possible because a stereotype
extends a UML meta-class, as we can see in
Figure 1.
3. MARTE Profile
The MARTE profile [
29], shown in
Figure 2, contains three packages:
MARTE Foundations,
MARTE Design Model and
MARTE Analysis Model.
MARTE Foundations proposed in [
29] offers concepts defining the basic behavior in real-time systems, a framework for NFP annotation, both quantitative and qualitative, a time model, a resource model and a causality model.
MARTE Design Model offers concepts for modeling aspects, such as concurrency and synchronization, in real-time systems, as well as a component model for this field.
MARTE Analysis Model is the package for analysis, in particular, it defines profiles for schedulability (
SAM) and performance analysis (
PAM), as extensions of the
GQAM profile, which DAM also specializes. Finally, MARTE offers (a) the
VSL profile, for describing the particular values associated to NFP, and (b) the
MARTE Library, which defines the units of measures and offers data types and pre-defined NFP types.
In the following, we first discuss basic concepts in the real-time field as described in MARTE [
29], then describe the functionalities of the NFP profile.
3.1. Basic Concepts in the Real-Time Domain
Time, events and resources are among the most important concepts in the real-time domain [
38], and MARTE offers a general framework for their representation and modeling as follows.
Physical time is assumed to progress monotonically and in a forward direction, and it is the base for scheduling issues in critical systems. The time is assumed to be an ordered set of
instants. For measuring the progress of physical time,
clocks are introduced, which can be physical or logical.
Events can occur in the system causing the execution of
behaviors.
Time and
behavior are tightly coupled in MARTE. Events are associated to
instants of time. Sometimes, events can be considered as a whole since their collective effect is the same as the serialization of their individual ones. A
resource is an entity, physical or logical, that offers one or more
services. Resources provide a platform for the real-time system to be executed, and they can be software or hardware. Resources and services are the means to satisfy the system requirements. The functional elements of the system need to be
allocated, both spatially and temporally, onto available resources. The spatial allocation means the mapping of (a) computation elements to processing elements, (b) data to memory and (c) data/control to communication resources. The temporal allocation means the temporal ordering of the computations. MARTE distinguishes resources as follows:
ExecutionHost: the machine where the operating system processes execute;
CommunicationsHost: for ensuring the connection of computing nodes;
SchedulableResource: the threads and process managed by the operating system;
CommunicationChannel: the links dispatching messages.
Finally, scenarios provide the means for steps (computational activities) to be executed by components, that act as resources for providing the system services.
3.2. Specification of NFP
The MARTE NFP profile is defined in [
29] for specifying NFPs and their constraints and relationships in UML diagrams. It uses the VSL (
value specification language) profile, which offers a particular grammar for the NFP specification of data types, values and expressions. Extracted from [
29], the NFP package realizes the following set of functionalities:
NFP qualitative or quantitative nature. A quantitative property may be characterized by a set of measures expressed in terms of magnitude and unit.
Variables and expressions, beside concrete values, raise the level of abstractions of the specified properties, allowing to derive ones from others.
Trade-off between usability and flexibility. Usability suggests the merit of declaring a set of standard property types and their available operations for a certain domain, while flexibility allows for user-defined properties.
5. Case Study
Pai and Dugan reported in [
16] a study in the mission and safety-critical embedded systems field, with the goal of analyzing system dependability properties. Concretely, they developed UML models for a mission avionic system (MAS) and derived a dynamic fault tree. In [
11], we revisited the MAS specification of Pai and Dugan for adapting its models to the concepts proposed by DAM. Herein, we recall the MAS case study for illustrating a modeling approach using DAM. Since the task of annotating UML models with dependability properties is complex and requires some expertise, this example can be used by practitioners as a blueprint.
5.1. System Description
MAS are conceived to be reconfigurable and highly redundant. Redundancy is always considered at software and hardware levels. The MAS proposed in [
16] consists of five sub-systems. Each subsystem aggregates a set of components, which execute on different devices, see
Figure 6. The software components addresses the control tasks as follows: the crew station by
CrewStnA and
CrewStnB, the obstacles and scene by
S&OA and
S&OB, the generation of the paths by
PathGenA and
PathGenB, the system management by
SysMgtA and
SysMgtB and the vehicle management by
VM1A,
VM1B,
VM2A and
VM2B. For clarity, primary processing modules are postfixed as
A, while modules representing hot spares are postfixed as
B.
For ensuring dependability, redundancy mechanisms are introduced in the system as backups, both hot and cold spares. Hot spare modules (e.g., S&OB) take control when a failure or error occurs, and it is detected by its corresponding primary unit (e.g., S&OA). Regarding the component managing the vehicle, it uses two processing devices, which account for a backup, in the form of a hot spare, each. Regarding cold spare backups, they are activated when two failures occur simultaneously. The cold spare backups are named Spare1, Spare2 for four of the subsystems, and VMSp1, VMSp2 for the vehicle management subsystem. The busses that interconnect the sub-systems own their redundancy mechanisms also. Among them, the mission management bus (MMBus) that interconnects all the subsystems is triplicated. The component managing the vehicle duplicates the bus (VMBus). The bus, called B/G Data Bus, connecting memory units Memory1 and Memory2, is also triplicated.
Reconfigurability is the other dependability mechanism used for reinforcing the MAS. In fact, some of the components have alternate minimal software versions, such as the controllers for the obstacles and the scene, as well as the one for generating the paths. The goal is to provide reduced functionality, obviously requiring fewer computing resources. Concretely, only one processor, instead of the two required for the full version. Finally, according to the failure assumptions made by Pai and Dugan, the system can fail in different situations: (a) if any of the subsystems do not properly work; (b) if both the memories fail; or (c) if all the busses fail.
5.2. Dependability Modeling of the MAS with UML
From the previous system description, we modeled different UML diagrams to represent the different system views of interest. The UML package diagram in
Figure 7 represents the block diagram in
Figure 6. Each package accounts for a subsystem, and each dependency relationship represents a relation among packages.
In the following, we first describe how UML profile annotations are applied to the elements of the model. Then, starting from UML models, we use the DAM profile to model the redundancies in the system, the input parameters for the reliability analyses and reconfiguration activities.
5.2.1. Usage of Profiles Stereotypes
MARTE and DAM stereotypes can be applied to the MAS UML models already developed. In this way, we can obtain the MAS dependability view. In particular, at the model specification level, a stereotype is applied to a concrete element of the model, provided that it belongs to a UML meta-class
extended by such stereotype. For example, in
Figure 7 the
DaComponent stereotype is applied to the memory sub-system. This is possible because
DaComponent specializes the MARTE::GRM::Resource stereotype and the latter
extends the UML::Classes::Kernel::Classifier meta-class. Being that the memory sub-system is modeled as a UML class, in fact as an instance of the classifier meta-class, it can be stereotyped as
DaComponent.
When a model element is stereotyped, it inherits the properties of the stereotype, that is, its tags. Then, the stereotyped model element can be
annotated by assigning values to the tags (namely
tagged-values). The values must conform to the type associated to the tag. For example, the memory sub-system in
Figure 7 is annotated with several tagged values to specify its origin, i.e., hardware component (
origin = hw tagged-value), the number of memories (
resMult = 2 tagged-value) and its failure characteristics (
failure = occurrenceRate = (value = , unit = fail/yr). In particular, the
origin tagged value is an enumeration, the
resMult is an integer, and the
failure tagged value is a complex dependability type (cf.
Section 4).
5.2.2. Redundancy Modeling with DAM
One of the important features of the dependability view concerns the modeling of the redundancy. We have three different redundancy constructs in the MAS case study: replicated resources, redundant structures and cold spare components. They are represented in
Figure 7. Regarding the replicated resources, we have busses and memories. Resources are stereotyped as
DaComponent, whose tag
resMult represents the number of replicas. For example,
resMult = 3 indicates three replicas of the
BGDataBus, while
resMult = 2 indicates that the
Memory is duplicated. Regarding redundant structures, each sub-system constitutes one of them.
DaRedundantStructure is the stereotype used to label packages representing subsystems; hence, the tag
FTlevel can be used to specify the fault-tolerance level of such a subsystem. This levels means the minimum number of components for a redundant structure to work. The
DaSpare stereotype labels spare components. The tag
dormancyFactor = 1 specifies the kind of spare (hot spares in this case). The tag
resMult can also be used for spare components since this tag belongs to the
DaComponent stereotype, a superclass of
DaSpare. Finally, the tag
substitutesFor indicates a list of components that can substitute for this spare component.
5.2.3. Reliability Input Parameters
We want to compute the failure rate of each component and the probabilities of the error propagation. These input parameters can be annotated using the DAM profile. The former is specified, using
DaComponent or
DaSpare stereotypes, with the tag
occurrenceRate (see
Figure 7). The latter are attached instead to the association or dependency relations, which are stereotyped as
DaConnector. For example, we assign the probability of error propagation of
to the association between
BGDataBus and
Spare: since the error propagation is bidirectional (i.e., from the bus to the spare and vice versa), the tags
from and
to them, which enable indicating the source and the target components, are omitted.
5.2.4. Reconfiguration
Reconfiguration comprises strategies that the engineer designs to be implemented when failures in the system occur. The objective is to bring the system to a gracefully degraded state in which the basic functionalities can still be provided; therefore, activities for the replacement and/or reallocation of system components need to be carried out. In order to have a proper representation of the system reconfiguration, both the reconfiguration static view and its behavioral counterpart should be designed. In UML, we have the class diagram, object diagram and deployment diagram for addressing the static view. For the MAS, we chose the deployment since it allows us to represent the hardware elements involved in the reconfiguration as well as the mapping of the software components into this hardware. Regarding the behavioral view, UML offers a rich set of diagrams, among them being the activity, sequence and state machines. We chose the UML state machine diagram for describing the reconfiguration activities since it enables to capture reconfiguration events explicitly. Let us briefly describe both reconfiguration views for the MAS in the following.
The static view, deployment diagram in
Figure 8, depicts the components for the control of the scene and the generation of the paths. Components providing full versions are stereotyped as
DaComponent, while the ones providing minimal functionalities are
DaVariant. The full and minimal versions are joined in a
DaRedundantStructure package and mapped to processors (primary and spare). The hardware redundancy, although modeled in the class diagram, is also specified here using
DaComponent and
DaSpare stereotypes.
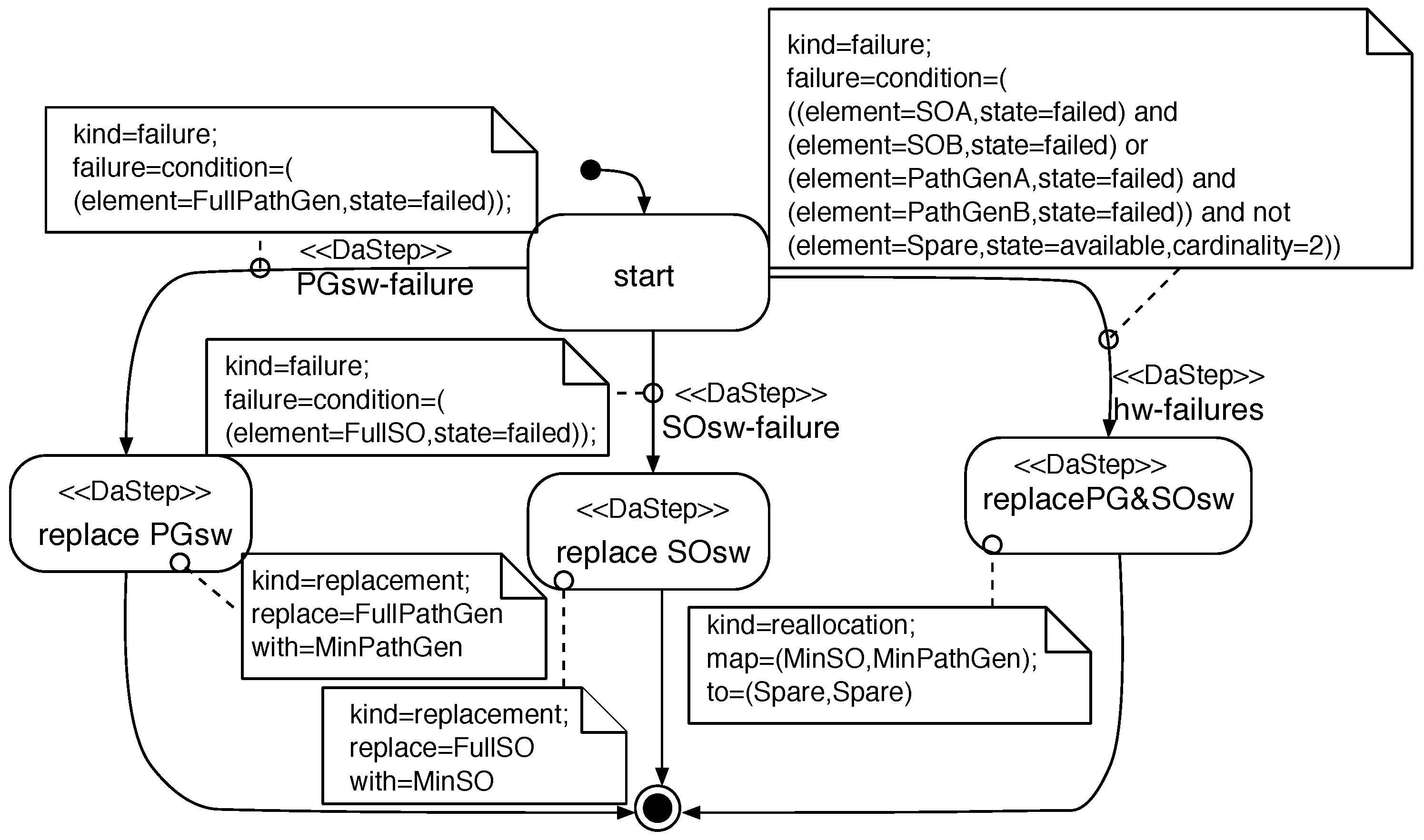
The behavioral view state machine in
Figure 9 describes the actions to take when the full versions of the software need to be replaced by the minimal ones. Replacement occurs (a) if a software failure occurs, i.e., the modules fail, and (b) if a hardware failure occurs, i.e., the two processors fail (primary and spare). The software failure events,
PGsw-failure and
SOsw-failure, lead to states
replacePGsw and
replaceSOsw, respectively, where replacement activities are carried out. The hardware failure event
hw-failures goes through state
replacePG&OSsw to replace the full versions by minimal ones, which run on a single spare processor. Failure conditions for triggering failure events, hardware and software, are modeled in the transitions that go through reconfiguration states, which are labeled as
DaStep, and they indicate either
replacement or
reallocation.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}