
Review of Tethered Unmanned Aerial Vehicles: Building Versatile and Robust Tethered Multirotor UAV System


Abstract
1. Introduction
2. Applications of TMUAVs
2.1. Payload Transportation
2.2. Disaster Management
2.3. Data Collection
3. Challenges of TMUAVs
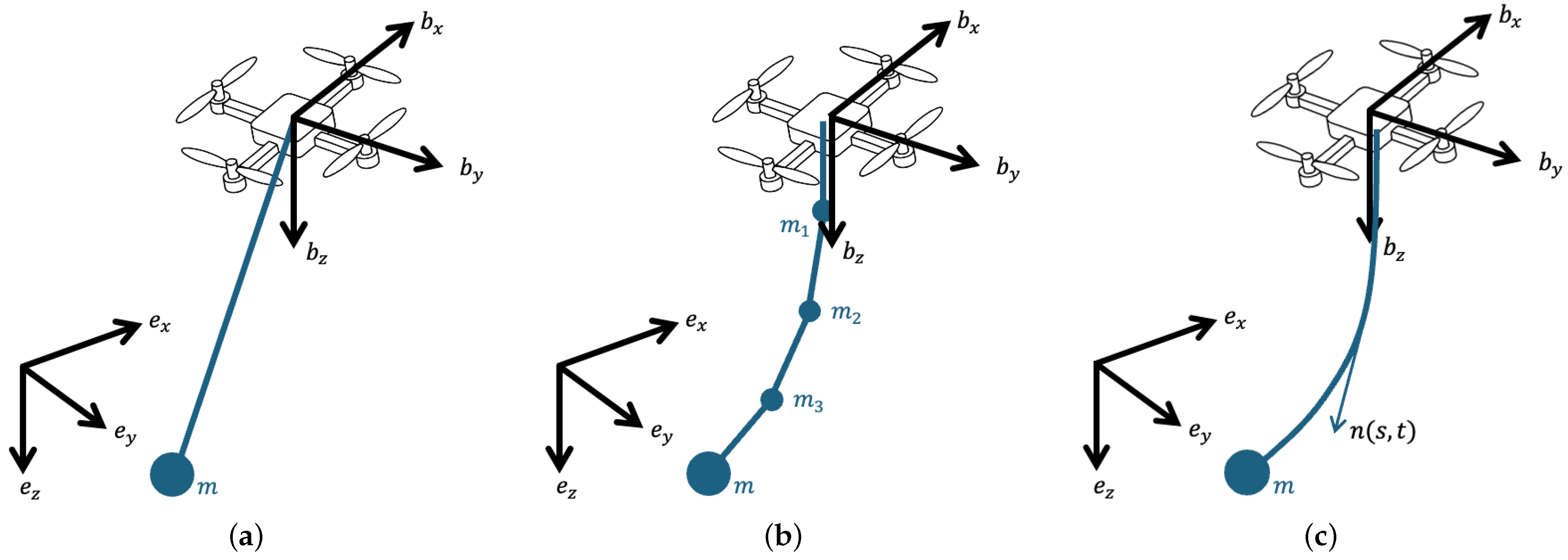
3.1. Dynamics of Tether
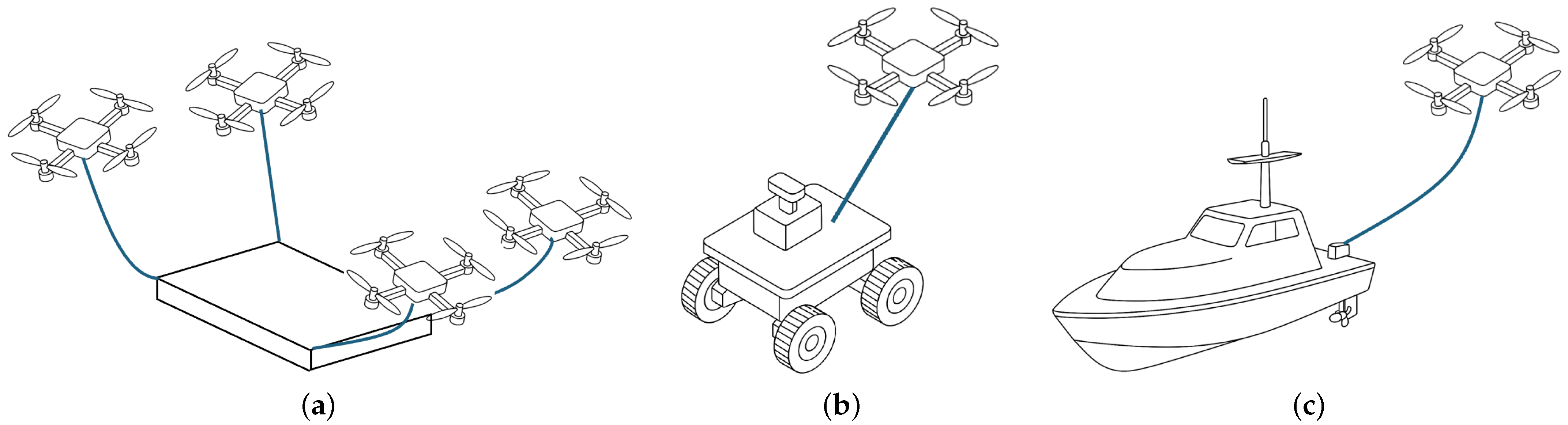
3.2. Cooperative TMUAV Mission
4. TMUAV Testbed
4.1. Simulation Testbed
4.2. Experimental Testbed
5. Variable Length TMUAVs
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| MUAV | Multirotor |
| TUAV | Tethered Unmanned Aerial Vehicle |
| TMUAV | Tethered Multirotor Unmanned Aerial Vehicle |
| MIQP | Mixed-Integer Quadratic Programming |
| PDE | Partial Differential Equation |
| VTOL | Vertical Take-Off and Landing |
References
- Ord, S.; Marino, M.; Wiley, T. Modernising Delivery: A Low-Energy Tethered Package System Using Fixed-Wing Drones. In Proceedings of the International Conference on Intelligent Robots and Systems, Abu Dhabi, United Arab Emirates, 14–18 October 2024; pp. 2271–2277. [Google Scholar]
- Bushnaq, O.M.; Kishk, M.A.; Celik, A.; Alouini, M.S.; Al-Naffouri, T.Y. Optimal deployment of tethered drones for maximum cellular coverage in user clusters. IEEE Trans. Wirel. Commun. 2020, 20, 2092–2108. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.M.; Alsamhi, S.; Abdullah, Q. Energy-efficient tethered UAV deployment in B5G for smart environments and disaster recovery. In Proceedings of the International Conference on Emerging Smart Technologies and Applications, Sana’a, Yemen, 10–12 August 2021; pp. 1–5. [Google Scholar]
- Matracia, M.; Kishk, M.A.; Alouini, M.S. UAV-aided post-disaster cellular networks: A novel stochastic geometry approach. IEEE Trans. Veh. Technol. 2023, 72, 9406–9418. [Google Scholar] [CrossRef]
- Kirubakaran, B.; Hosek, J. Optimizing tethered UAV deployment for on-demand connectivity in disaster scenarios. In Proceedings of the IEEE Vehicular Technology Conference, Florence, Italy, 20–23 June 2023; pp. 1–6. [Google Scholar]
- Muttin, F. Umbilical deployment modeling for tethered UAV detecting oil pollution from ship. Appl. Ocean. Res. 2011, 33, 332–343. [Google Scholar] [CrossRef]
- Kourani, A.; Daher, N. Marine locomotion: A tethered UAV-buoy system with surge velocity control. Robot. Auton. Syst. 2021, 145, 103858. [Google Scholar] [CrossRef]
- Xu, Z. Application research of tethered UAV platform in marine emergency communication network. J. Web Eng. 2021, 20, 491–511. [Google Scholar] [CrossRef]
- Talke, K.; Birchmore, F.; Bewley, T. Autonomous hanging tether management and experimentation for an unmanned air-surface vehicle team. J. Field Robot. 2022, 39, 869–887. [Google Scholar] [CrossRef]
- Dinh, T.D.; Vishnevsky, V.; Larionov, A.; Vybornova, A.; Kirichek, R. Structures and deployments of a flying network using tethered multicopters for emergencies. In Proceedings of the Distributed Computer and Communication Networks, Moscow, Russia, 14–18 September 2020; pp. 28–38. [Google Scholar]
- Schulz, M.; Augugliaro, F.; Ritz, R.; D’Andrea, R. High-speed, steady flight with a quadrocopter in a confined environment using a tether. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1279–1284. [Google Scholar]
- Martinez Rocamora, B., Jr.; Lima, R.R.; Samarakoon, K.; Rathjen, J.; Gross, J.N.; Pereira, G.A. Oxpecker: A tethered UAV for inspection of stone-mine pillars. Drones 2023, 7, 73. [Google Scholar] [CrossRef]
- Kobayashi, M.; Huang, G.; Buzzatto, J.; Lynch, A.; Kyriakopoulos, K.; Liarokapis, M. Modular, Tethered, Reconfigurable Hybrid Robotic Vehicles for Aerial Grasping and Package Delivery. In Proceedings of the IEEE International Symposium on Safety Security Rescue Robotics, New York, NY, USA, 12–14 November 2024; pp. 131–135. [Google Scholar]
- Faust, A.; Palunko, I.; Cruz, P.; Fierro, R.; Tapia, L. Automated aerial suspended cargo delivery through reinforcement learning. Artif. Intell. 2017, 247, 381–398. [Google Scholar] [CrossRef]
- Oh, S.R.; Pathak, K.; Agrawal, S.K.; Pota, H.R.; Garratt, M. Approaches for a tether-guided landing of an autonomous helicopter. IEEE Trans. Robot. 2006, 22, 536–544. [Google Scholar]
- Sandino, L.A.; Bejar, M.; Kondak, K.; Ollero, A. Advances in modeling and control of tethered unmanned helicopters to enhance hovering performance. J. Intell. Robot. Syst. 2014, 73, 3–18. [Google Scholar] [CrossRef]
- Nicotra, M.M.; Naldi, R.; Garone, E. Taut cable control of a tethered UAV. IFAC Proc. Vol. 2014, 47, 3190–3195. [Google Scholar] [CrossRef]
- Tognon, M.; Franchi, A. Nonlinear observer-based tracking control of link stress and elevation for a tethered aerial robot using inertial-only measurements. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 3994–3999. [Google Scholar]
- Xiao, X.; Dufek, J.; Murphy, R. Visual servoing for teleoperation using a tethered UAV. In Proceedings of the International Symposium on Safety, Security and Rescue Robotics, Shanghai, China, 11–13 October 2017; pp. 147–152. [Google Scholar]
- Glick, T.; Arogeti, S. Control of tethered drones with state and input constraints-a unified model approach. In Proceedings of the International Conference on Unmanned Aircraft Systems, Dallas, TX, USA, 12–15 June 2018; pp. 995–1002. [Google Scholar]
- Goodarzi, F.A.; Lee, T. Dynamics and control of quadrotor UAVs transporting a rigid body connected via flexible cables. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 4677–4682. [Google Scholar]
- Goodarzi, F.A.; Lee, D.; Lee, T. Geometric control of a quadrotor UAV transporting a payload connected via flexible cable. Int. J. Control Autom. Syst. 2015, 13, 1486–1498. [Google Scholar] [CrossRef]
- Shen, Y.; Franchi, A.; Gabellieri, C. Aerial Robots Carrying Flexible Cables: Dynamic Shape Optimal Control via Spectral Method Model. arXiv 2024, arXiv:2403.17565. [Google Scholar] [CrossRef]
- Xiao, X.; Dufek, J.; Suhail, M.; Murphy, R. Motion planning for a UAV with a straight or kinked tether. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 8486–8492. [Google Scholar]
- Hegde, A.; Ghose, D. Multi-UAV collaborative transportation of payloads with obstacle avoidance. IEEE Control Syst. Lett. 2021, 6, 926–931. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, F.; Huang, P. Formation planning for tethered multirotor UAV cooperative transportation with unknown payload and cable length. IEEE Trans. Autom. Sci. Eng. 2023, 21, 3449–3460. [Google Scholar] [CrossRef]
- Cao, M.; Cao, K.; Yuan, S.; Nguyen, T.M.; Xie, L. NEPTUNE: Nonentangling Trajectory Planning for Multiple Tethered Unmanned Vehicles. IEEE Trans. Robot. 2023, 39, 2786–2804. [Google Scholar] [CrossRef]
- Naldi, R.; Gasparri, A.; Garone, E. Cooperative pose stabilization of an aerial vehicle through physical interaction with a team of ground robots. In Proceedings of the IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 415–420. [Google Scholar]
- Papachristos, C.; Tzes, A. The power-tethered UAV-UGV team: A collaborative strategy for navigation in partially-mapped environments. In Proceedings of the Mediterranean Conference on Control and Automation, Palermo, Italy, 16–19 June 2014; pp. 1153–1158. [Google Scholar]
- Lupashin, S.; D’Andrea, R. Stabilization of a flying vehicle on a taut tether using inertial sensing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2432–2438. [Google Scholar]
- Sandino, L.A.; Bejar, M.; Kondak, K.; Ollero, A. On the use of tethered configurations for augmenting hovering stability in small-size autonomous helicopters. J. Intell. Robot. Syst. 2013, 70, 509–525. [Google Scholar] [CrossRef]
- Kosarnovsky, B.; Arogeti, S. Geometric and constrained control for a string of tethered drones. Robot. Auton. Syst. 2020, 133, 103609. [Google Scholar] [CrossRef]
- Belmekki, B.E.Y.; Alouini, M.S. Unleashing the potential of networked tethered flying platforms: Prospects, challenges, and applications. IEEE Open J. Veh. Technol. 2022, 3, 278–320. [Google Scholar] [CrossRef]
- Marques, M.N.; Magalhães, S.A.; Dos Santos, F.N.; Mendonça, H.S. Tethered unmanned aerial vehicles—A systematic review. Robotics 2023, 12, 117. [Google Scholar] [CrossRef]
- Palunko, I.; Cruz, P.; Fierro, R. Agile load transportation: Safe and efficient load manipulation with aerial robots. IEEE Robot. Autom. Mag. 2012, 19, 69–79. [Google Scholar] [CrossRef]
- Chang, P.; Yang, S.; Tong, J.; Zhang, F. A new adaptive control design for a quadrotor system with suspended load by an elastic rope. Nonlinear Dyn. 2023, 111, 19073–19092. [Google Scholar] [CrossRef]
- Lee, T.; Sreenath, K.; Kumar, V. Geometric control of cooperating multiple quadrotor UAVs with a suspended payload. In Proceedings of the IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 5510–5515. [Google Scholar]
- Sreenath, K.; Lee, T.; Kumar, V. Geometric control and differential flatness of a quadrotor UAV with a cable-suspended load. In Proceedings of the IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 2269–2274. [Google Scholar]
- Yu, B.; Gamagedara, K.; Kim, S.; Lee, T.; Suk, J. Geometric control and experimental validation for a quadrotor UAV transporting a payload. In Proceedings of the IEEE Conference on Decision and Control, Jeju, Republic of Korea, 8–11 December 2020; pp. 201–207. [Google Scholar]
- Gamagedara, K.; Lee, T. Geometric adaptive controls of a quadrotor unmanned aerial vehicle with decoupled attitude dynamics. J. Dyn. Syst. Meas. Control 2022, 144, 031002. [Google Scholar] [CrossRef]
- Zeng, J.; Kotaru, P.; Sreenath, K. Geometric control and differential flatness of a quadrotor uav with load suspended from a pulley. In Proceedings of the American Control Conference, Philadelphia, PA, USA, 10–12 July 2019; pp. 2420–2427. [Google Scholar]
- Pizetta, I.H.B.; Brandao, A.S.; Sarcinelli-Filho, M. Modelling and control of a PVTOL quadrotor carrying a suspended load. In Proceedings of the International Conference on Unmanned Aircraft Systems, Denver, CO, USA, 9–12 June 2015; pp. 444–450. [Google Scholar]
- Sreenath, K.; Michael, N.; Kumar, V. Trajectory generation and control of a quadrotor with a cable-suspended load—A differentially-flat hybrid system. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4888–4895. [Google Scholar]
- Tang, S.; Kumar, V. Mixed integer quadratic program trajectory generation for a quadrotor with a cable-suspended payload. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2216–2222. [Google Scholar]
- Lee, J.; Cho, N.; Kim, Y. Smooth Trajectory Generation and Control of Multirotor with Slung Payload. In Proceedings of the Asian Pacific International Symposium on Aerospace Technology, Daejeon, Republic of Korea, 16–18 October 2017. [Google Scholar]
- Cruz, P.J.; Fierro, R. Cable-suspended load lifting by a quadrotor UAV: Hybrid model, trajectory generation, and control. Auton. Robot. 2017, 41, 1629–1643. [Google Scholar] [CrossRef]
- Villa, D.K.D.; Brandão, A.S.; Carelli, R.; Sarcinelli-Filho, M. Cooperative Load Transportation With Two Quadrotors Using Adaptive Control. IEEE Access 2021, 9, 129148–129160. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, F.; Huang, P.; Gao, J.; Yu, H.; Pei, C.; Zhang, Y. Self-triggered based coordinate control with low communication for tethered multi-UAV collaborative transportation. IEEE Robot. Autom. Lett. 2021, 6, 1559–1566. [Google Scholar] [CrossRef]
- Yu, B.; Lee, T. Multi-Agent Reinforcement Learning for the Low-Level Control of a Quadrotor UAV. In Proceedings of the American Control Conference, Toronto, ON, Canada, 10–12 July 2024; pp. 1537–1542. [Google Scholar]
- Sharma, M.; Sundaram, S. A geometric control approach for multi-UAV cooperative payload transfer. Nonlinear Dyn. 2023, 111, 10077–10096. [Google Scholar] [CrossRef]
- Kiribayashi, S.; Yakushigawa, K.; Nagatani, K. Position estimation of tethered micro unmanned aerial vehicle by observing the slack tether. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics, Shanghai, China, 11–13 October 2017; pp. 159–165. [Google Scholar]
- Papachristos, C.; Zikou, L.; Tzes, A. Deployment of a VSTOL-UAV for perception purposes in search and rescue operations. In Proceedings of the SafeChania, Crete, Greece, 10–12 June 2015. [Google Scholar]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Shvetsova, S.V.; Alhartomi, M.A.; Hawbani, A.; Rajput, N.S.; Srivastava, S.; Saif, A.; Nyangaresi, V.O. UAV computing-assisted search and rescue mission framework for disaster and harsh environment mitigation. Drones 2022, 6, 154. [Google Scholar] [CrossRef]
- Półka, M.; Ptak, S.; Kuziora, Ł. The use of UAV’s for search and rescue operations. Procedia Eng. 2017, 192, 748–752. [Google Scholar] [CrossRef]
- Liu, C.; Ding, L.; Gu, J. Dynamic Modeling and Motion Stability Analysis of Tethered UAV. In Proceedings of the International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 11–13 June 2021; pp. 106–110. [Google Scholar]
- Goodarzi, F.A.; Lee, D.; Lee, T. Geometric stabilization of a quadrotor UAV with a payload connected by flexible cable. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4925–4930. [Google Scholar]
- Battocletti, G.; Boskos, D.; Tolić, D.; Palunko, I.; de Schutter, B. Entanglement Definitions for Tethered Robots: Exploration and Analysis. IEEE Access 2024, 12, 178153–178170. [Google Scholar] [CrossRef]
- Petit, L.; Desbiens, A.L. Tape: Tether-aware path planning for autonomous exploration of unknown 3d cavities using a tangle-compatible tethered aerial robot. IEEE Robot. Autom. Lett. 2022, 7, 10550–10557. [Google Scholar] [CrossRef]
- Miki, T.; Khrapchenkov, P.; Hori, K. UAV/UGV autonomous cooperation: UAV assists UGV to climb a cliff by attaching a tether. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 8041–8047. [Google Scholar]
- Shao, G.; Ma, Y.; Malekian, R.; Yan, X.; Li, Z. A novel cooperative platform design for coupled USV–UAV systems. IEEE Trans. Ind. Inform. 2019, 15, 4913–4922. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating dynamic event-triggered and sensor-tolerant control: Application to USV-UAVs cooperative formation system for maritime parallel search. IEEE Trans. Intell. Transp. Syst. 2023, 25, 3986–3998. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Li, B. Robust adaptive neural cooperative control for the USV-UAV based on the LVS-LVA guidance principle. J. Mar. Sci. Eng. 2022, 10, 51. [Google Scholar] [CrossRef]
- Fisher, C.; Ahlschlager, K. Tethered Multi-Robot System for Improved Path Planning and Exploration. In Proceedings of the International Conference on Advanced Robotics, Abu Dhabi, United Arab Emirates, 5–8 December 2023; pp. 150–156. [Google Scholar]
- Satme, J.N.; Yount, R.; Goujevskii, N.; Jannazzo, L.; Downey, A.R.J. Sensor Package Deployment and Recovery Cone with Integrated Video Streaming for Rapid Structural Health Monitoring. In Proceedings of the ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Atlanta, GA, USA, 9–11 September 2024; p. V001T04A016. [Google Scholar]
- Mankala, K.K.; Agrawal, S.K. Dynamic Modeling and Simulation of Satellite Tethered Systems. J. Vib. Acoust. 2004, 127, 144–156. [Google Scholar] [CrossRef]
- Malashin, A.; Smirnov, N.; Bryukvina, O.Y.; Dyakov, P. Dynamic control of the space tethered system. J. Sound Vib. 2017, 389, 41–51. [Google Scholar] [CrossRef]
- Li, S.; Duong, T.T.; Zanotto, D. In-flight cable length control for improved quadrotor-based suspended load transportation. IEEE Robot. Autom. Lett. 2023, 9, 667–674. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, Z.; Pei, T.; Han, J.; Fang, Y.; Liang, X. Visual Servoing-Based Anti-Swing Control of Cable-Suspended Aerial Transportation Systems With Variable-Length Cable. IEEE Trans. Autom. Sci. Eng. 2024, 22, 5955–5965. [Google Scholar] [CrossRef]
- Oh, D.D.; Byun, J.; Lee, D. Real-Time Trajectory Generation of a Quadrotor UAV with Load Suspended from a Pulley. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 27 November–1 December 2022; pp. 1309–1314. [Google Scholar]
- Yang, Y.; Zhang, D.; Xi, H.; Zhang, G. Anti-swing control and trajectory planning of quadrotor suspended payload system with variable length cable. Asian J. Control 2022, 24, 2424–2436. [Google Scholar] [CrossRef]
- Bisheban, M.; Lee, T. Geometric adaptive control with neural networks for a quadrotor in wind fields. IEEE Trans. Control Syst. Technol. 2020, 29, 1533–1548. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Advantages | Challenges |
|---|---|
| No need to land on rough terrain | Impulsive cable dynamics |
| Power supply for extended missions | Tether weight |
| Guided landing | Tether entanglement |
| Undisturbed communication | Higher hardware complexity |
| Collaboration with ground robot | Higher disturbance |
| Navigation in enclosed spaces | Obstacle avoidance |
| Model Type | Advantages | Limitations |
|---|---|---|
| Rigid rod [7,14,15,18,19,20,50,55] | Simple dynamics Taught tether | Unrealistic Cannot describe slack tether |
| Hybrid model [21,37,38,43,44] | Slack and taught tether models Differentially flat hybrid system | Modeling error from approximation Delay in slack-taut transition |
| Series of links [22,56] | Slack tether behavior More realistic modeling Number of links can be increased for higher fidelity | Modeling error from approximation More computationally demanding |
| Flexible cable [23,27] | Accurate modeling of elastic tether | Computationally demanding |
| Literature | Assumptions on Modeling | Contributions |
|---|---|---|
| Zeng et al. (2019) [41] |
|
|
| Oh et al. (2022) [69] |
|
|
| Yang et al. (2022) [70] |
|
|
| Li et al. (2024) [67] |
|
|
| Yu et al. (2024) [68] |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Handrick, D.; Eckenrode, M.; Lee, J. Review of Tethered Unmanned Aerial Vehicles: Building Versatile and Robust Tethered Multirotor UAV System. Dynamics 2025, 5, 17. https://doi.org/10.3390/dynamics5020017
Handrick D, Eckenrode M, Lee J. Review of Tethered Unmanned Aerial Vehicles: Building Versatile and Robust Tethered Multirotor UAV System. Dynamics. 2025; 5(2):17. https://doi.org/10.3390/dynamics5020017
Chicago/Turabian StyleHandrick, Dario, Mattie Eckenrode, and Junsoo Lee. 2025. "Review of Tethered Unmanned Aerial Vehicles: Building Versatile and Robust Tethered Multirotor UAV System" Dynamics 5, no. 2: 17. https://doi.org/10.3390/dynamics5020017
APA StyleHandrick, D., Eckenrode, M., & Lee, J. (2025). Review of Tethered Unmanned Aerial Vehicles: Building Versatile and Robust Tethered Multirotor UAV System. Dynamics, 5(2), 17. https://doi.org/10.3390/dynamics5020017