

The Dynamics of a Turning Ship: Mathematical Analysis and Simulation Based on Free Body Diagrams and the Proposal of a Pleometric Index

Abstract
:
1. Introduction
- (1)
- to provide a starting point for any mechanical analysis of forces (including their measurement);
- (2)
- to carefully isolate the FDB from its environment, identifying the location of the contact forces and their centre of pressure (COP), as well as the placement of contact sensors (force, pressure) for subsequent instrumentation at the interface of the FBD and its environment;
- (3)
- to include all forces acting on the FBD, which must be in equilibrium (the FBD is considered rigid);
- (4)
- although not part of the definition and therefore rarely mentioned in the textbooks, to consider the moments and their equilibrium;
- (5)
- to formulate the equilibrium equations (forces and moments) and calculate the magnitude and position (COP) of the contact forces, as well as accelerations, velocities, and displacements from resulting differential equations when the FBD is dynamic and not static;
- (6)
- to identify unknown parameters within the equilibrium equations and design tests to determine these parameters experimentally.
‘I have found through many years of experience that the absence of a FBD in a student’s work on a particular problem signifies that there will most likely be errors in the analysis of the problem, or, even worse, the student does not have a good grasp of the problem’.
- Pérez and Clemente [13] (p. 519, Figure 1);
- Huang and Wang [18] (p. 2251, Figure 1) showed an FBD, specifically labelled ‘free body diagram’, similar to [9], but also added rudder forces; furthermore, they listed the three equations of motion similar to [15], decomposing the x- and y-forces into propulsion, rudder and (hydrodynamic) hull resistance forces.
- The International Towing Tank Conference Association [19] (p. 11, Figure 3e,f) showed another simple FBD of a ship with two forces in x- and y-directions, specified as ‘hydrodynamic forces’, not in equilibrium with any other force vector. Their equations of motion [19] (p. 9, Equation (1)) included further forces, presumably applied ones, as well as inertial forces, that were not shown in their incomplete FBD.
2. Methods
2.1. Free Body Diagrams and Mathematical Modelling of a Turning Ship
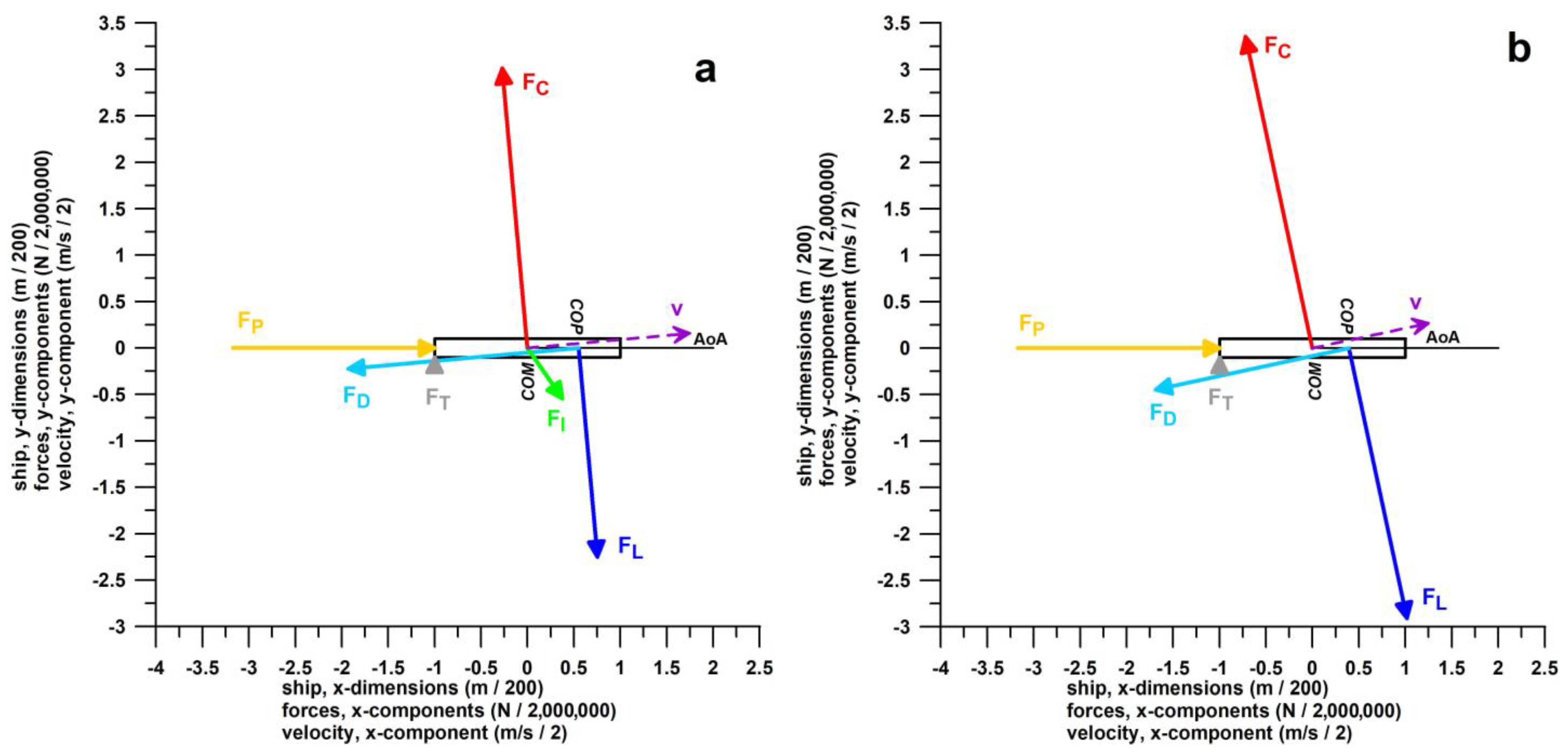
- (1)
- propulsive force, FP, acting in the direction of +x with its COP at the stern;
- (2)
- thruster force, FT, perpendicular to FP, in the direction of ±y and having its COP at stern;
- (3)
- hydrodynamic drag force, FD, opposed to the ship’s velocity vector, originating from the hydrodynamic COP;
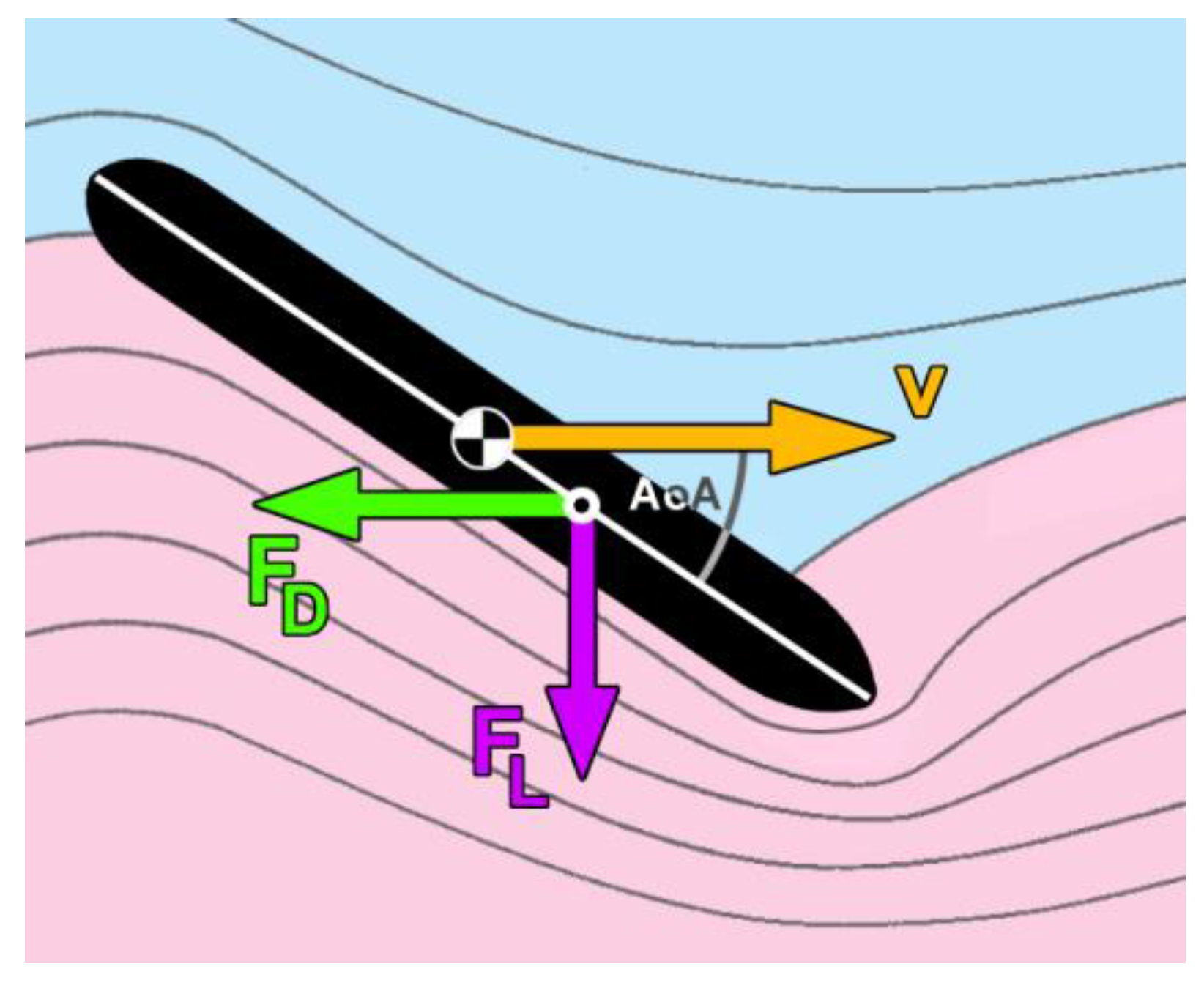
- (4)
- hydrodynamic lift force, FL, acting perpendicular to the ship’s velocity vector and centripetally sideways (Figure 2), originating from the hydrodynamic COP;
- (5)
- centrifugal force, FC, perpendicular to the tangent at the ships trajectory curve, and thus pointing away from the centre of rotation (COR), originating from the COM;
- (6)
- inertial force, FI, originating from the COM;
- (7)
- hydrodynamic force couple created by the rotation of the ship, producing a free moment.
2.2. Input Data and Scenarios for Simulation
- (a)
- (b)
- the mass m, length L, and draught D of ships to be simulated; and
- (c)
- the density ρ of seawater (1024 kg m –3).
2.3. Validation of the Simulation with Experimental Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Data | L (m) | D (m) | m (kg) | ρ (kg/m3) | AoA (°) | R (m) | R/L (-) | log AoA | log R/L | log index 𐊬 | log (AoA·R/L) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| m/4 | 458.5 | 24.6 | 164,247,068 | 1024 | 0.26 | 3292.1 | 7.18 | −0.577 | 0.86 | −1.51 | 0.28 |
| 4ρ | 458.5 | 24.6 | 656,988,272 | 4096 | 0.26 | 3292.1 | 7.18 | −0.577 | 0.86 | −1.51 | 0.28 |
| 4D | 458.5 | 98.4 | 656,988,272 | 1024 | 0.26 | 3292.1 | 7.18 | −0.577 | 0.86 | −1.51 | 0.28 |
| 2L | 917 | 24.6 | 656,988,272 | 1024 | 0.26 | 6584.1 | 7.18 | −0.577 | 0.86 | −1.51 | 0.28 |
| m/2 | 458.5 | 24.6 | 328,494,136 | 1024 | 1.03 | 1745.2 | 3.81 | 0.013 | 0.58 | −1.21 | 0.59 |
| 2ρ | 458.5 | 24.6 | 656,988,272 | 2048 | 1.03 | 1745.2 | 3.81 | 0.013 | 0.58 | −1.21 | 0.59 |
| 2D | 458.5 | 49.2 | 656,988,272 | 1024 | 1.03 | 1745.2 | 3.81 | 0.013 | 0.58 | −1.21 | 0.59 |
| 1.4L | 648.4 | 24.6 | 656,988,272 | 1024 | 1.03 | 2468.1 | 3.81 | 0.013 | 0.58 | −1.21 | 0.59 |
| default | 458.5 | 24.6 | 656,988,272 | 1024 | 4.01 | 1011 | 2.21 | 0.603 | 0.34 | −0.91 | 0.95 |
| 2m | 458.5 | 24.6 | 1,313,976,544 | 1024 | 11.66 | 743.8 | 1.62 | 1.067 | 0.21 | −0.61 | 1.28 |
| ρ/2 | 458.5 | 24.6 | 656,988,272 | 512 | 11.66 | 743.8 | 1.62 | 1.067 | 0.21 | −0.61 | 1.28 |
| D/2 | 458.5 | 12.3 | 656,988,272 | 1024 | 11.66 | 743.8 | 1.62 | 1.067 | 0.21 | −0.61 | 1.28 |
| L/1.4 | 324.2 | 24.6 | 656,988,272 | 1024 | 11.66 | 525.9 | 1.62 | 1.067 | 0.21 | −0.61 | 1.28 |
| 4m | 458.5 | 24.6 | 2,627,953,088 | 1024 | 21.94 | 644.6 | 1.41 | 1.341 | 0.15 | −0.30 | 1.49 |
| ρ/4 | 458.5 | 24.6 | 656,988,272 | 256 | 21.94 | 644.6 | 1.41 | 1.341 | 0.15 | −0.30 | 1.49 |
| D/4 | 458.5 | 6.2 | 656,988,272 | 1024 | 21.94 | 644.6 | 1.41 | 1.341 | 0.15 | −0.30 | 1.49 |
| L/2 | 229.3 | 24.6 | 656,988,272 | 1024 | 21.94 | 322.3 | 1.41 | 1.341 | 0.15 | −0.30 | 1.49 |
3. Results
3.1. Dynamic Parameters of a Turning Ship
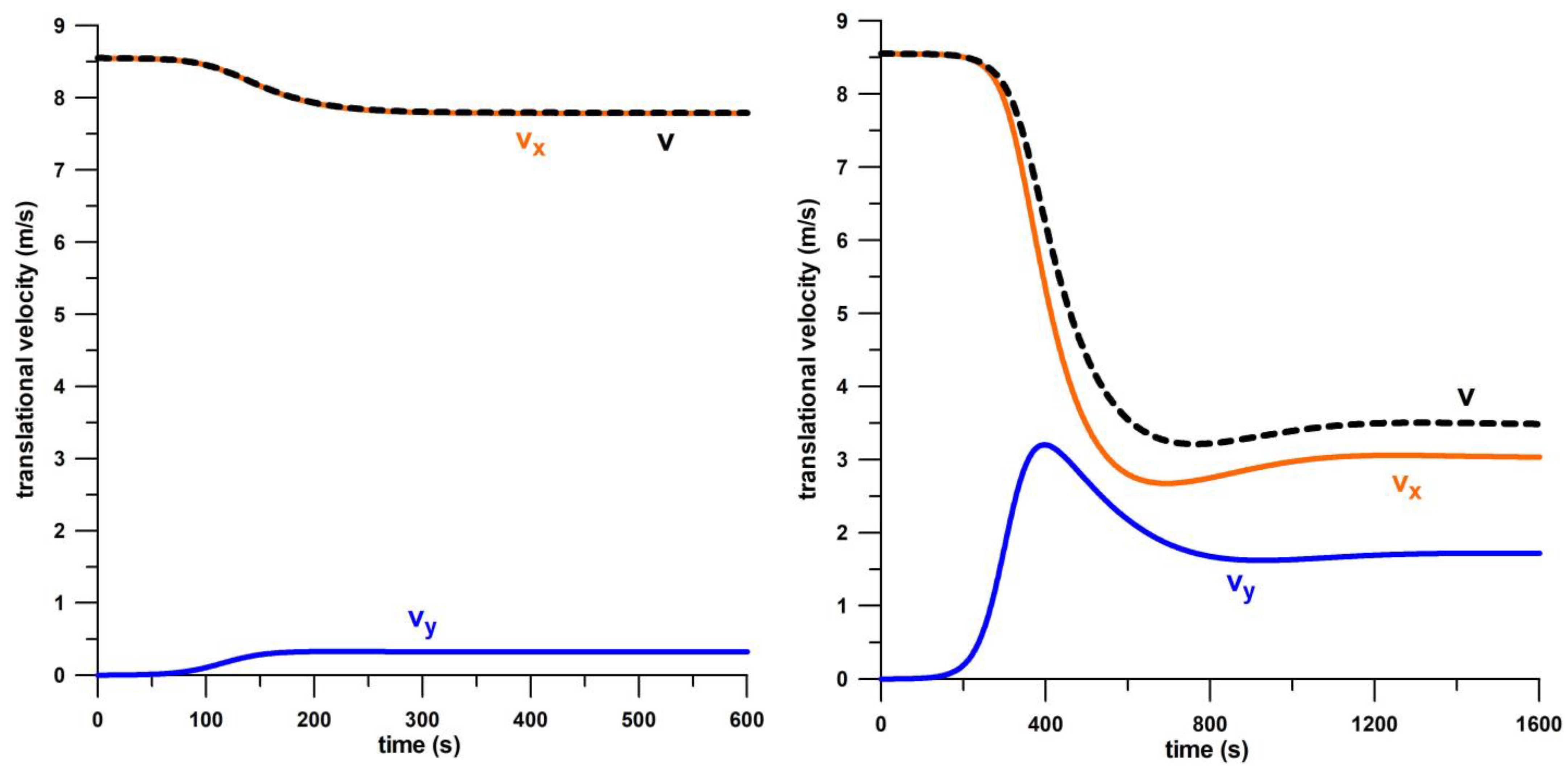
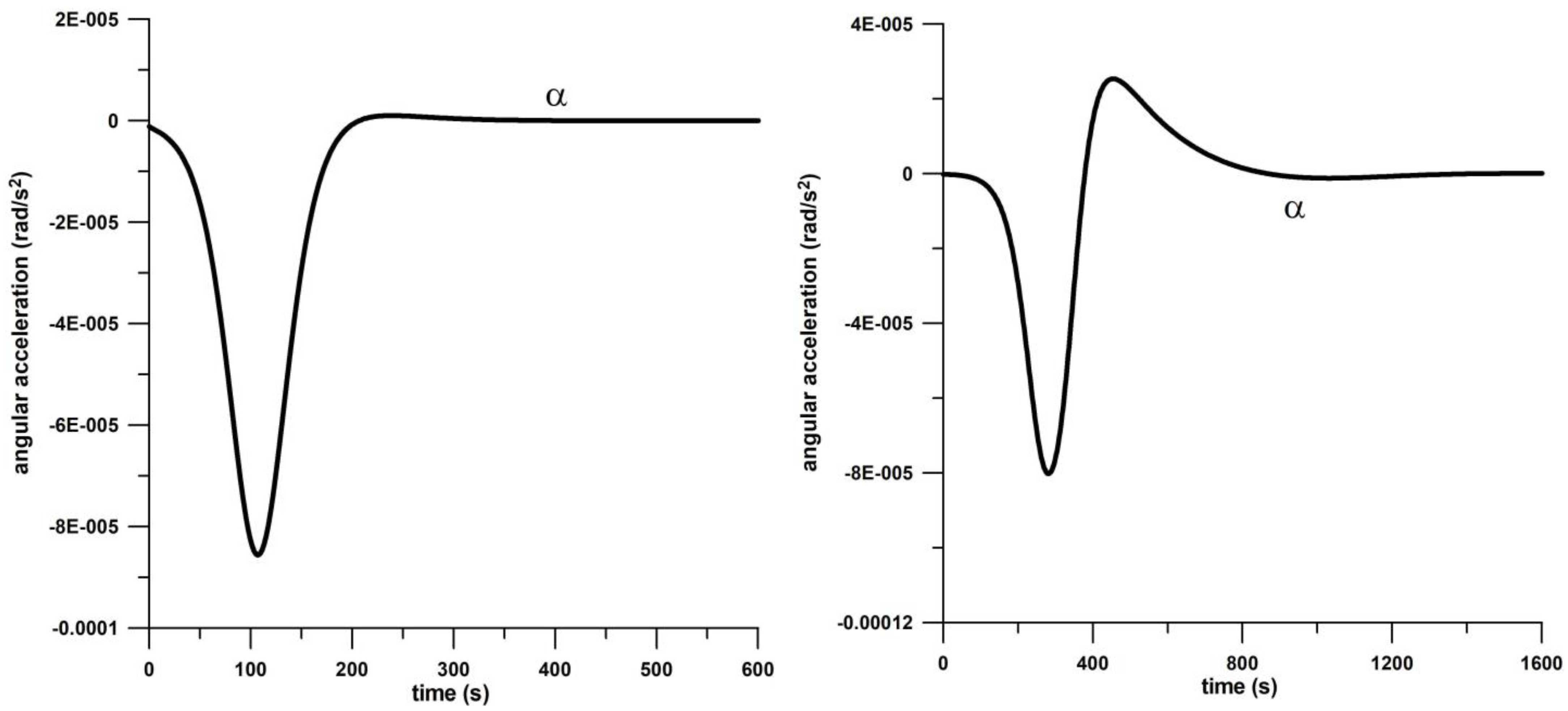
3.1.1. Velocities and Accelerations


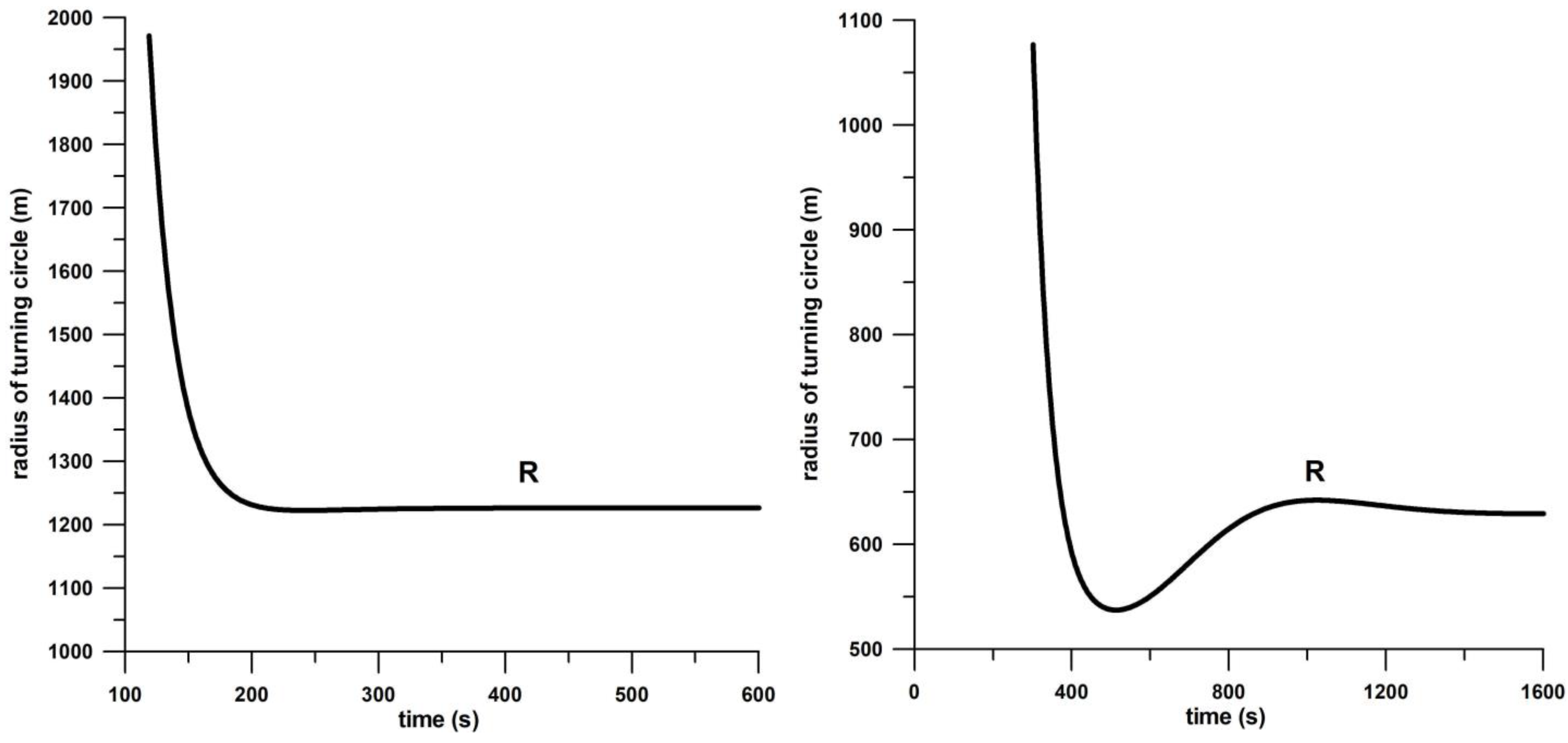
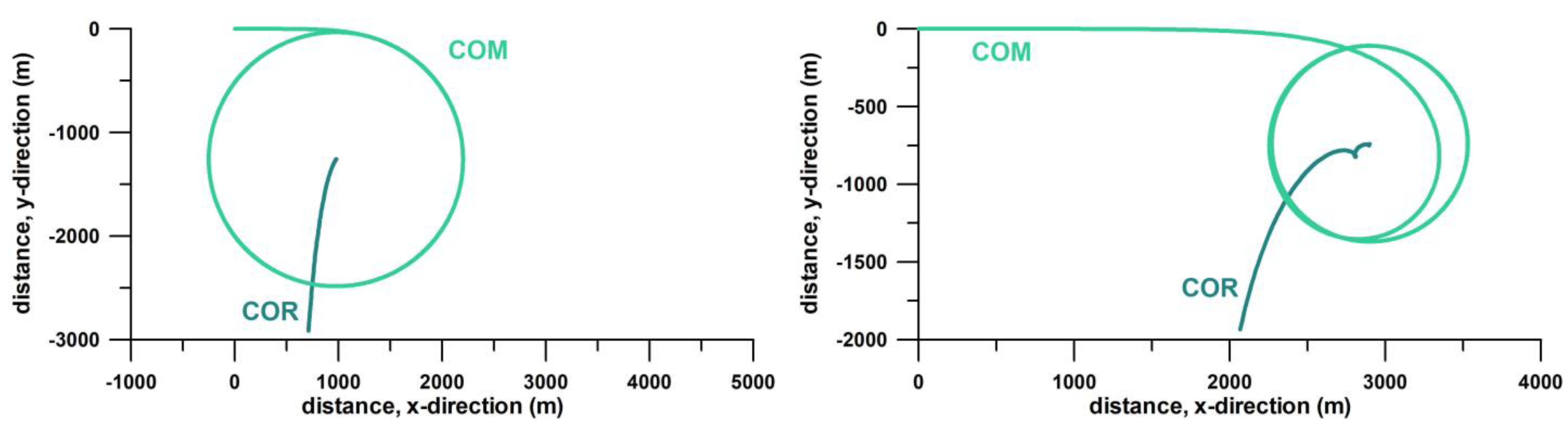
3.1.2. Turning Circle and Angle of Attack

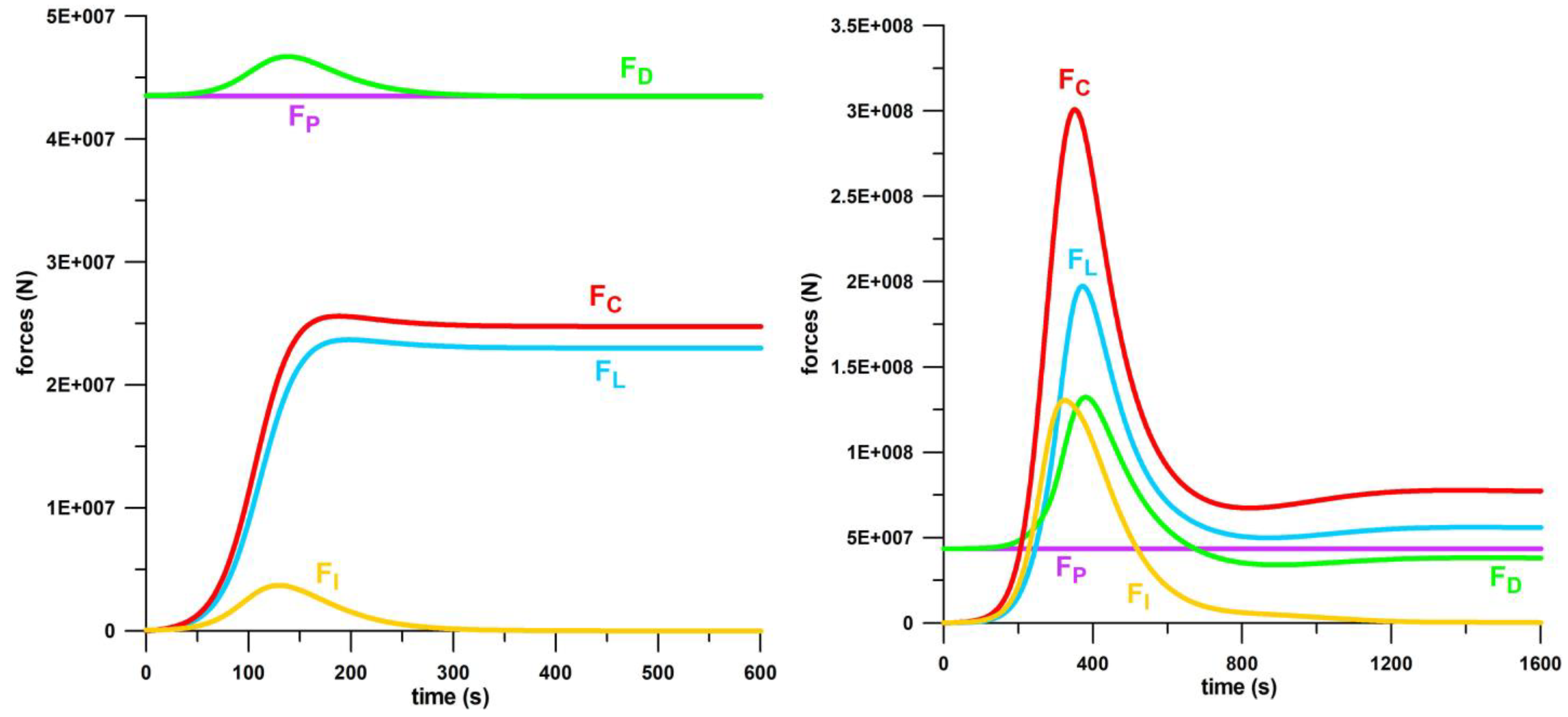
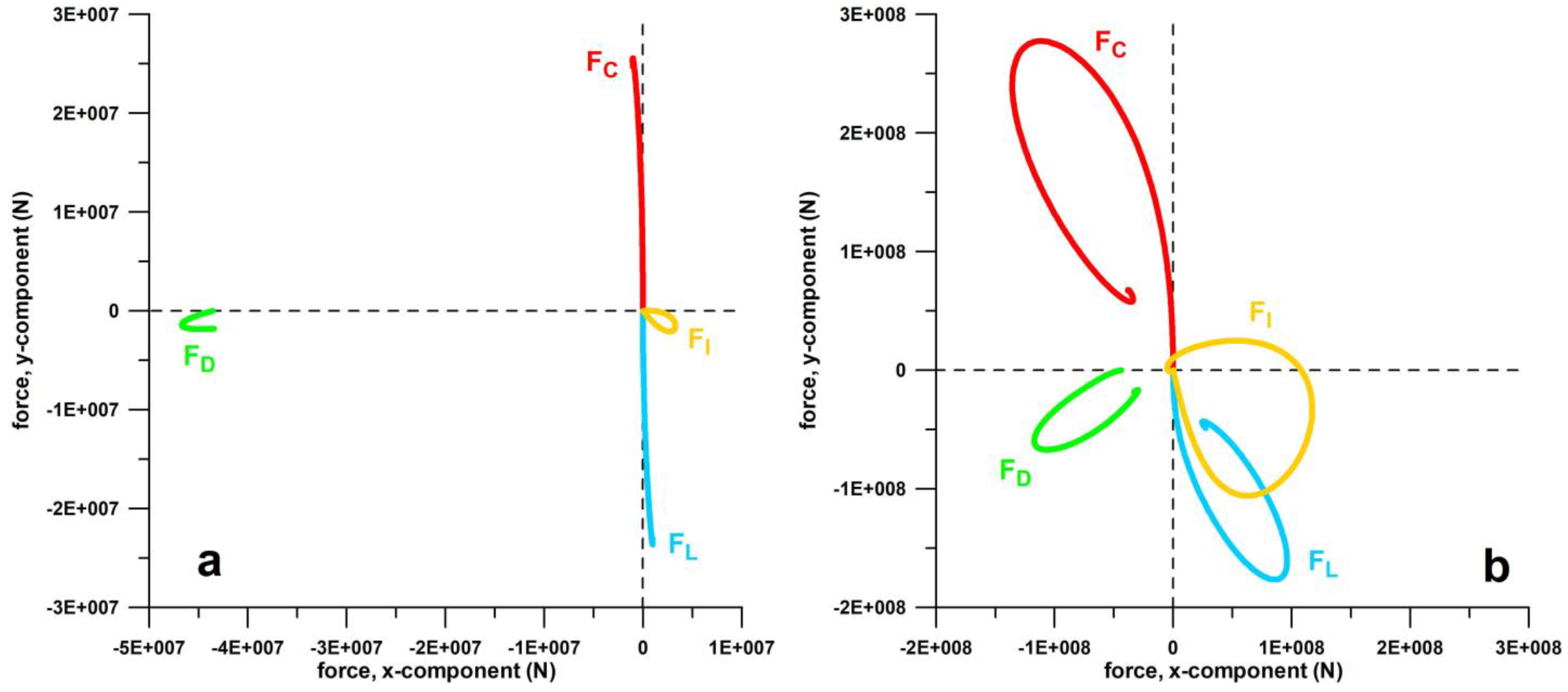
3.1.3. Forces and Their Vector Diagrams

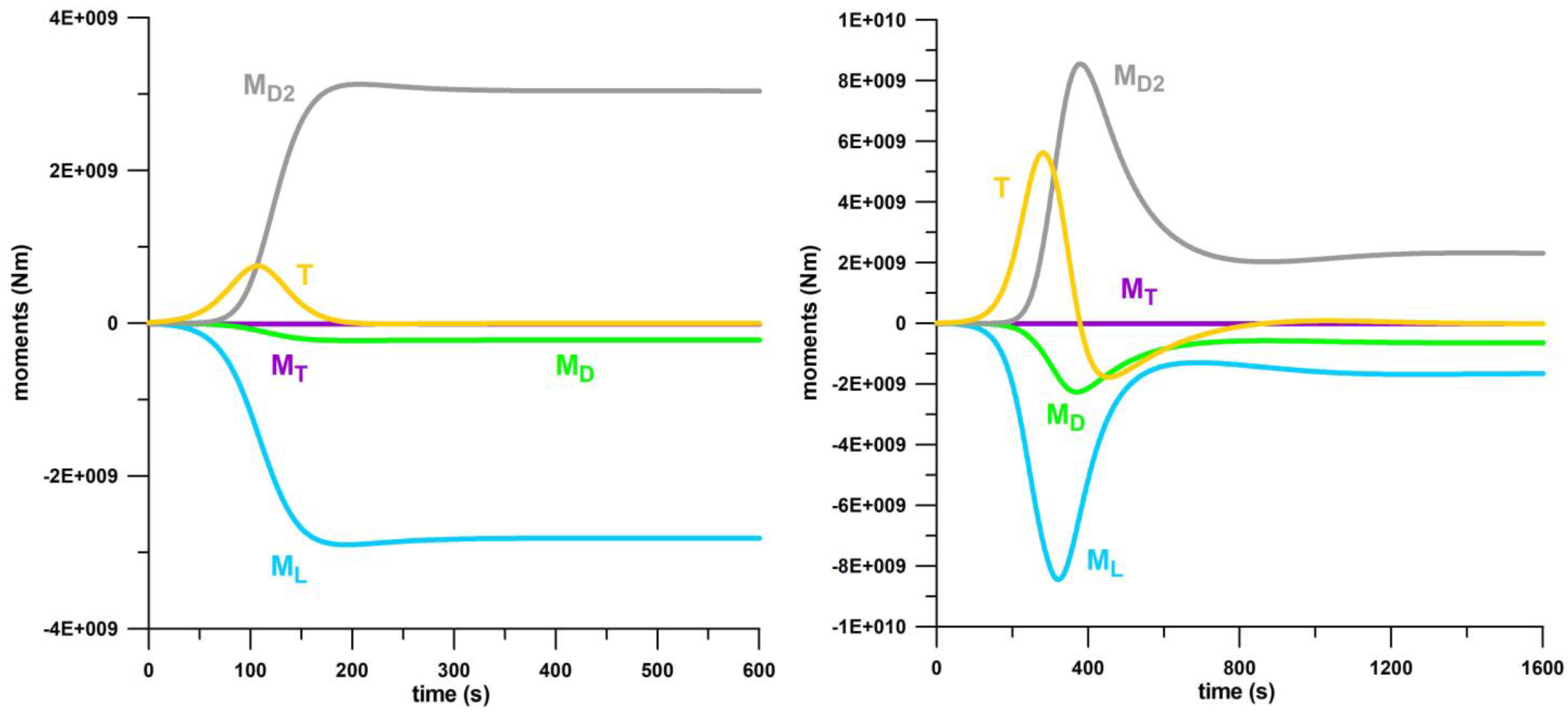
3.1.4. Moments
3.2. Model Validation with Experimental Data
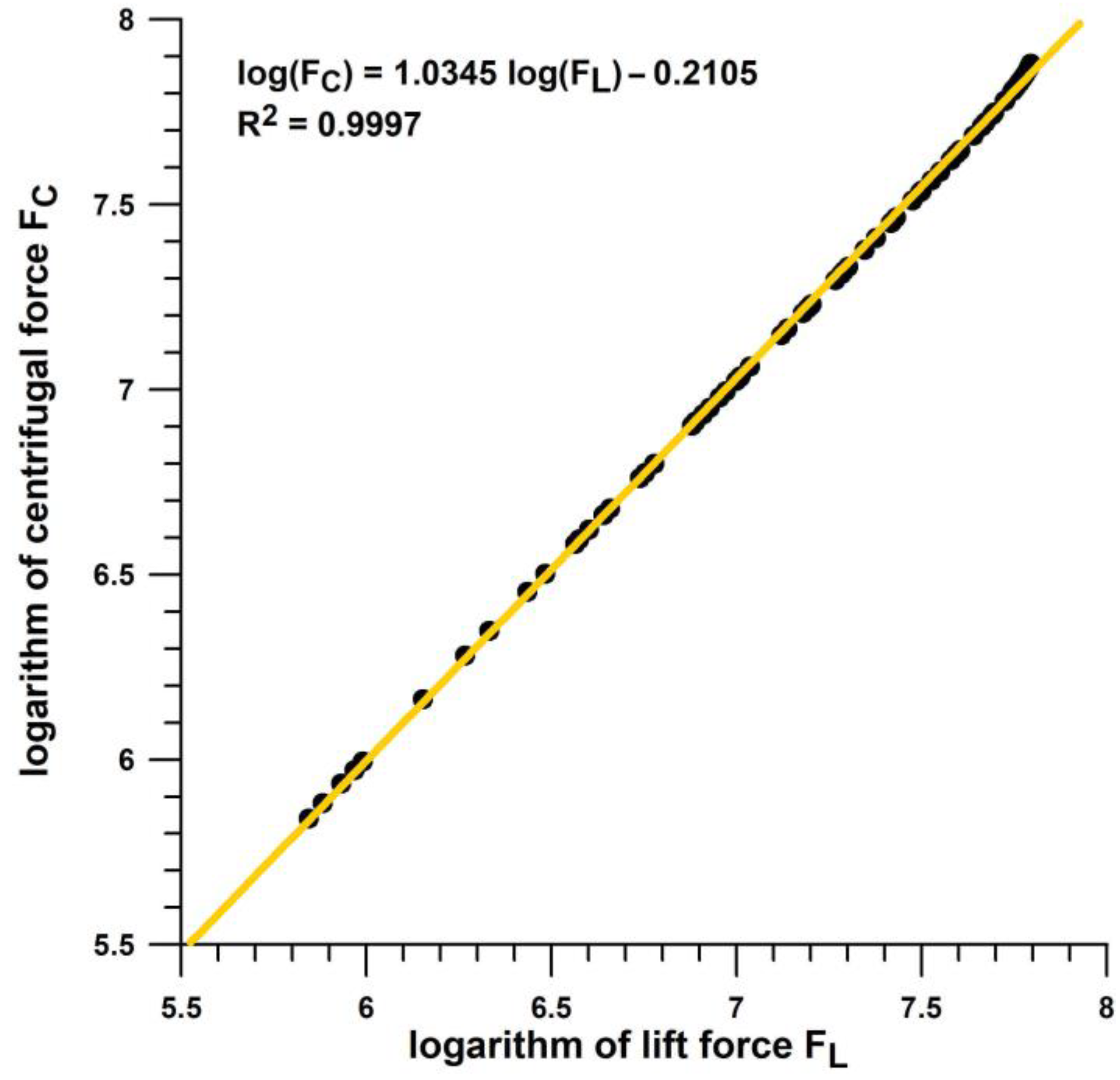
3.3. Proportionality of Lift and Centrifugal Forces, and Proposal of a Pleometric Index
4. Discussion
- -
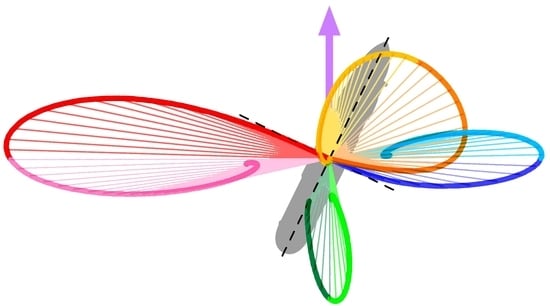
- describes the changing dynamic variables (velocities, accelerations, turning radius, angle of attack, forces, moments) as a time series;
- -
- provides continuous vector diagrams of centrifugal, inertial, lift, and drag forces throughout the turning motion;
- -
- identifies the force couple of centrifugal and lift forces as the main source of stable equilibrium during the turn;
- -
- establishes the proportionality of centrifugal and lift forces;
- -
- derives from this proportionality a pleometric index 𐊬 for predicting the turning dynamics of a ship; and
- -
- calculates this pleometric index solely from the characteristics of a ship, namely as a function of its mass, length, and draught (and also the water density).

| Parameter | Condition 1 (m↓, L↑, D↑, ρ↑, 𐊬↓) | Condition 2 (m↑, L↓, D↓, ρ↓ 𐊬↑) |
|---|---|---|
| turning radius R | longer | shorter, undershooting/oscillating before reaching the steady state |
| angle of attack AoA | lower/flatter | higher/steeper, overshooting/oscillating before reaching the steady state |
| translational velocity v, x- and y-components | vx >> vy | vx (undershooting) > vy (overshooting); vy can be temporarily greater than vx in the transient phase |
| translational acceleration a | smaller | greater (ay undershooting after spike) |
| angular velocity ω | smaller | greater (overshooting spike) |
| angular acceleration α | spike before steady state | undershooting after spike |
| forces | FC, FL < FD, FP | FC, FL > FD, FP; pronounced overshoot of FC and FL |
| envelopes of force vector diagrams | almost straight envelopes of FC and FL | envelopes with pronounced hooks of FC and FL |
| moments | smooth transition to steady state MD, ML, MD2 | spikes of MD, ML, MD2 before the steady state; T undershooting after spike |
- The hydrodynamic equations used by Reference [19] apply the lateral area of a ship as the reference surface for hydrodynamic calculations (mean draught times ship length), which is the standard for streamlined bodies such as symmetrical aerofoils, cambered aerofoils, flat plates with AoAs smaller than the stall angle, and teardrop shapes without or with Kamm tails.
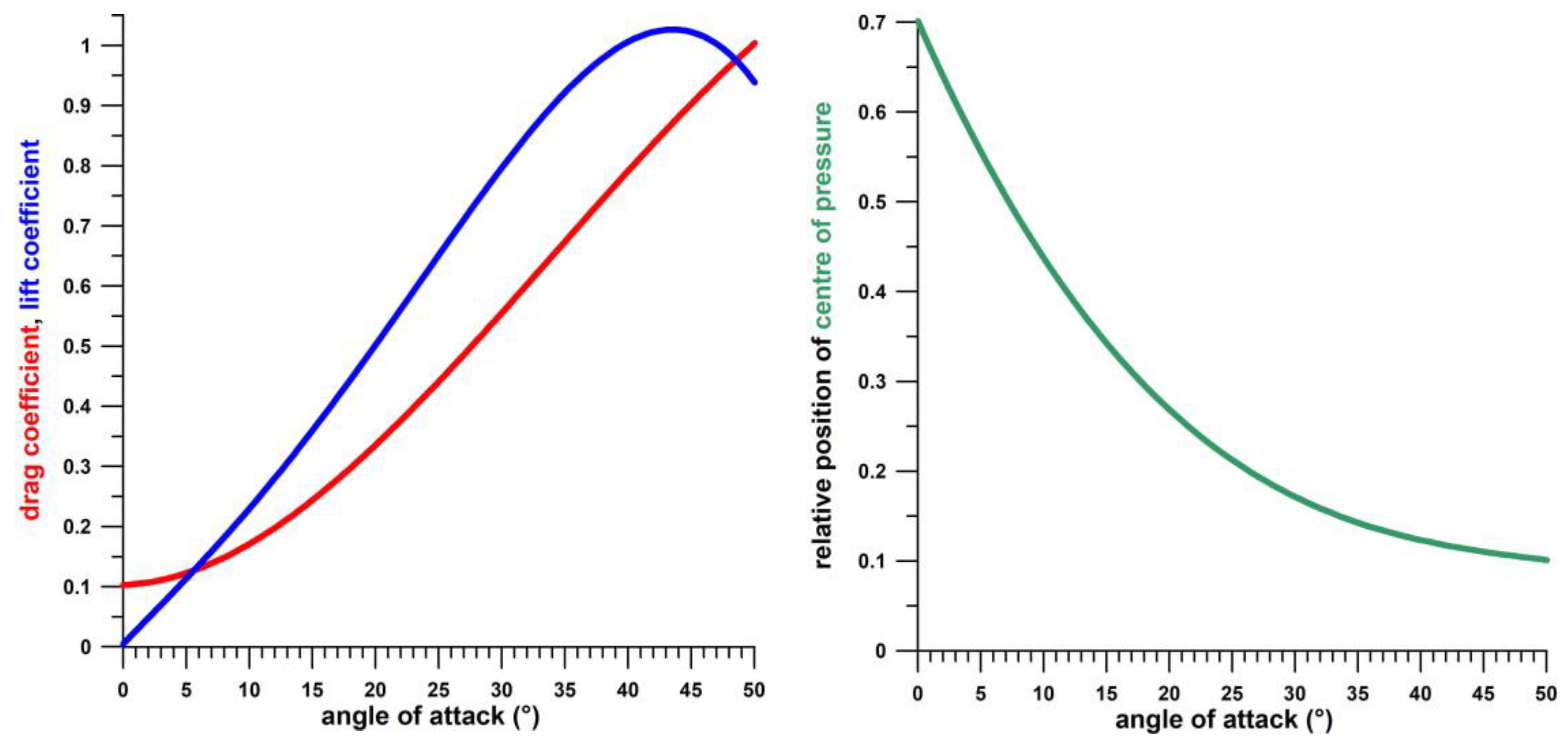
- Fluid dynamic data of flat plates at extreme aspect ratios are available in the literature [27], in particular on drag and lift coefficients, and the position of the fluid dynamic centre of pressure (COP), all expressed as a function of the angle of attack. In order to run the model under realistic conditions, these input data are taken from flat plates [27].
- Larger vessels such as oversized containerships and oil tankers have a constant width (beam) over most of the ship’s length, and therefore resemble flat plates rather than symmetrical aerofoils. Other ships do not have a constant width and so do not resemble flat plates, but still resemble symmetrical streamlined bodies, so the general principles of drag, lift, and COP apply at different AoA—specifically that the drag coefficient increases as the AoA does; the lift coefficient increases up to a certain stall angle and then decreases as the AoA further increases; and the COP moves from the front stagnation point closer to the centroid of the streamlined body as the AoA increases.
- (1)
- Drag and lift experiments at realistic Reynolds numbers and at different AoAs. The models were to be statically mounted on a 6-DOF force and moment transducer in a water tunnel. These experiments serve to determine the drag and lift coefficients, as well as the COP as functions of AoA.
- (2)
- Dynamic measurement of water resistance as the ship model rotates about its COM in a water tank. A 1-DOF moment transducer should be placed between the rotation axis and the hull of the model to measure the free moment of the hydrodynamic force couple and determine the drag coefficient of the free moment.
- (3)
- Combination of (1) and (2) by rotating the model, rigidly and eccentrically mounted to a rotating axle with its COM offset from the axle in a water tank. The offset (i.e., the turning radius R) as well as the AoA should be adjustable. Since the combination of the chosen parameters of R, AoA, angular velocity ω, and mass m does not necessarily lead to a force and moment equilibrium of the model, further reaction-forces and -moments are generated at the interface between model and axle, which are measured by a 6-DOF force and moment transducer. Based on the measured forces and moments, the unknown drag and lift forces and their moments including the free moment of the hydrodynamic force couple can be calculated. The calculated parameters serve to validate the hydrodynamic parameters obtained from (1) and (2).
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shames, I.H. Engineering Mechanics: Statics, 4th ed.; Prentice Hall: Hoboken, NJ, USA, 1997; p. 152. [Google Scholar]
- Le Rond d’Alembert, J.-B. Traité de Dynamique; M.-A. David (David l’aîné): Paris, France, 1743. [Google Scholar]
- Triantafyllou, M.S.; Hover, F.S. Maneuvering and Control of Marine Vehicles; MIT Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Lewandowski, E.M. The Dynamics of Marine Craft: Maneuvering and Seakeeping (Volume 22 of Advanced Series on Ocean Engineering); World Scientific: Singapore, 2004. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Shuai, Y.; Li, G.; Xu, J.; Zhang, H. An Effective Ship Control Strategy for Collision-Free Maneuver Toward a Dock. IEEE Access 2020, 8, 110140–110152. [Google Scholar] [CrossRef]
- Kijima, K.; Katsuno, T.; Nakiri, Y.; Furukawa, Y. On the manoeuvring performance of a ship with the parameter of loading condition. J. Soc. Nav. Archit. Jpn. 1990, 1990, 141–148. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perara, L.P. Ship maneuvring prediction under navigation vector multiplication based pivot point estimation. IFAC-Pap. OnLine 2015, 48, 1–6. [Google Scholar] [CrossRef]
- Inoue, S.; Hirano, M.; Kijima, K. Hydrodynamic derivatives on ship manoeuvring. Int. Shipbuild. Prog. 1981, 28, 112–125. [Google Scholar] [CrossRef]
- Yoshimura, Y. Mathematical model for the manoeuvring ship motion in shallow water. J. Kansai Soc. Nav. Archit. Jpn. 1986, 200, 41–51. (In Japanese) [Google Scholar]
- Yoshimura, Y. Mathematical model for the manoeuvring ship motion in shallow water (2nd report). J. Kansai Soc. Nav. Archit. Jpn. 1988, 210, 77–84. (In Japanese) [Google Scholar]
- Yoshimura, Y. Mathematical model for manoeuvring ship motion (MMG model). In Proceedings of the Workshop on Mathematical Models for Operations Involving Ship-Ship Interaction, Tokyo, Japan, 4–5 August 2005; pp. 1–6. [Google Scholar]
- Pérez, F.L.; Clemente, J.A. The influence of some ship parameters on manoeuvrability studied at the design stage. Ocean Eng. 2007, 34, 518–525. [Google Scholar] [CrossRef]
- Carreño Moreno, J.E.; Sierra Vanegas, E.Y.; Jiménez González, V.H. Ship maneuverability: Full-scale trials of Colombian Navy Riverine Support Patrol Vessel. Ship Sci. Technol. 2011, 5, 69–86. [Google Scholar] [CrossRef]
- Carreño, J.E.; Mora, J.D.; Pérez, F.L. A study of shallow water’s effect on a ship’s pivot point. Ing. E Investig. 2012, 32, 27–31. [Google Scholar] [CrossRef]
- Carreño, J.E.; Mora, J.D.; Pérez, F.L. Mathematical model for maneuverability of a riverine support patrol vessel with a pump-jet propulsion system. Ocean Eng. 2013, 63, 96–104. [Google Scholar] [CrossRef]
- Liu, J. A Primer of Inland Vessel Maneuverability. In Mathematical Modeling of Inland Vessel Maneuverability Considering Rudder Hydrodynamics; Liu, J., Ed.; Springer: Cham, Switzerland, 2020; pp. 99–127. [Google Scholar] [CrossRef]
- Huang, H.-R.; Wang, Y.-L. Simulation of ship maneuvering using the plane motion model. Indian J. Geo Mar. Sci. 2017, 46, 2250–2257. [Google Scholar]
- ITTC (International Towing Tank Conference). ITTC—Recommended Procedures. Uncertainty Analysis for Manoeuvring Predictions Based on Captive Manoeuvring Tests; ITTC Association: Zürich, Switzerland, 2014. [Google Scholar]
- Ji, Z.; Huang, Y. Autonomous boat dynamics: How far away is simulation from the high sea? In Proceedings of the OCEANS 2017, Aberdeen, Scotland, UK, 19–22 June 2017; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Bowles, J. Turning characteristics and capabilities of high-speed monohulls. In Proceedings of the 3rd Chesapeake Power Boat Symposium, Annapolis, MD, USA, 15–16 June 2012; pp. 1–18. [Google Scholar]
- ABS (American Bureau of Shipping). Guide for Vessel Maneuverability; ABS: Houston, TX, USA, 2017. [Google Scholar]
- Cheirdaris, S. Lecture 2: Controlling Ship Dynamics; Aalto University: Espoo, Finland, 2021. [Google Scholar]
- Halpern, S. She Turned Two Points in 37 Seconds. 2010. Available online: http://www.titanicology.com/Titanica/Two-Points-in-Thirty-Seven-Seconds.pdf (accessed on 5 June 2023).
- Benedict, K. Theory behind Turning Dynamics of Ships. YouTube Video. 2020. Available online: https://www.youtube.com/watch?v=_qM8OjmrzPM (accessed on 28 March 2021).
- Matusiak, J. Dynamics of a Rigid Ship; Aalto University Publication Series; Aalto University: Espoo, Finland, 2013. [Google Scholar]
- Ortiz, X.; Rival, D.; Wood, D. Forces and moments on flat plates of small aspect ratio with application to PV wind loads and small wind turbine blades. Energies 2015, 8, 2438–2453. [Google Scholar] [CrossRef] [Green Version]
- Seawise Giant. Available online: https://en.wikipedia.org/wiki/Seawise_Giant (accessed on 28 November 2022).
- Gug, S.G.; Harshapriya, D.; Jeong, H.; Yun, J.H.; Kim, D.J.; Kim, Y.G. Analysis of manoeuvring characteristics through sea trials and simulations. The 3rd International Conference on Maritime Autonomous Surface Ship (ICMASS 2020). IOP Conf. Ser. Mater. Sci. Eng. 2020, 929, 012034. [Google Scholar] [CrossRef]
- Titanic. Available online: https://en.wikipedia.org/wiki/Titanic (accessed on 7 June 2023).
- Fuss, F.K. Slipstreaming in gravity powered sports: Application to racing strategy in ski cross. Front. Physiol. 2018, 9, 1032. [Google Scholar] [CrossRef] [PubMed]
- Luethi, S.M.; Denoth, J. The influence of aerodynamic and anthropometric factors on speed in skiing. Intl. J. Sport Biomech. 1987, 3, 345–352. [Google Scholar] [CrossRef]
- Witkowska, A.; Śmierzchalski, R.; Tomera, M.; Świsulski, D. Simulation of Ship Turning Circle Test for Ballast and Full Load Conditions [Dataset]; Gdańsk University of Technology: Gdańsk, Poland, 2020. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuss, F.K. The Dynamics of a Turning Ship: Mathematical Analysis and Simulation Based on Free Body Diagrams and the Proposal of a Pleometric Index. Dynamics 2023, 3, 379-404. https://doi.org/10.3390/dynamics3030021
Fuss FK. The Dynamics of a Turning Ship: Mathematical Analysis and Simulation Based on Free Body Diagrams and the Proposal of a Pleometric Index. Dynamics. 2023; 3(3):379-404. https://doi.org/10.3390/dynamics3030021
Chicago/Turabian StyleFuss, Franz Konstantin. 2023. "The Dynamics of a Turning Ship: Mathematical Analysis and Simulation Based on Free Body Diagrams and the Proposal of a Pleometric Index" Dynamics 3, no. 3: 379-404. https://doi.org/10.3390/dynamics3030021
APA StyleFuss, F. K. (2023). The Dynamics of a Turning Ship: Mathematical Analysis and Simulation Based on Free Body Diagrams and the Proposal of a Pleometric Index. Dynamics, 3(3), 379-404. https://doi.org/10.3390/dynamics3030021