All articles published by MDPI are made immediately available worldwide under an open access license. No special
permission is required to reuse all or part of the article published by MDPI, including figures and tables. For
articles published under an open access Creative Common CC BY license, any part of the article may be reused without
permission provided that the original article is clearly cited. For more information, please refer to
https://www.mdpi.com/openaccess.
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature
Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for
future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive
positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world.
Editors select a small number of articles recently published in the journal that they believe will be particularly
interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the
most exciting work published in the various research areas of the journal.
Department of Mathematical and Computer Sciences, Physical Sciences and Earth Sciences, University of Messina, Viale F. Stagno d’Alcontres 31, 98166 Messina, Italy
*
Author to whom correspondence should be addressed.
This paper deals with the application of the mathematical apparatus of quantum mechanics for the formulation of an operatorial model of a couple of populations spatially distributed over a one-dimensional region. The two populations interact with a competitive mechanism and are able to diffuse over the region. A nonlocal competition effect is also included. In more detail, we consider a one-dimensional region divided in N cells where the actors, represented by annihilation, creation, and a number fermionic operators, interact. The dynamics is governed by a self-adjoint and time-independent Hamiltonian operator describing the various interactions. The results of some numerical simulations are presented and discussed. The recently introduced variant of the standard Heisenberg approach, named -induced dynamics, is also used in order to take into account some changes in time of the attitudes of the two populations, and obtain more realistic dynamical outcomes.
The dynamics of different interacting species or populations occupying the same habitat is an important subject in theoretical biology. When two like populations share the same ecological niche, Gause’s law of competitive exclusion says that the less fitted population goes extinct. Nevertheless, this law can be violated in a patchy environment, where the coexistence may occur because of migration. In fact, the less fitted population may survive even in presence of a more competitive population provided that it is able to move more effectively towards unoccupied patches so balancing local extinction in some patches [1,2,3,4,5].
In the literature, the dynamics of spatially distributed interacting populations is often modeled in terms of reaction–diffusion partial differential equations [6], or using the coupled map lattice formalism. In both approaches, various behaviors can be observed, such as pattern formation in the distributions of the competing species, and/or synchronization effects between the phases of nearby regions.
In this paper, we use a different approach relying on the mathematical apparatus originally developed in quantum mechanics [7,8]. This because, in recent years, raising and lowering operators, and the so-called number representation, were successful in the mathematical modeling of several kinds of macroscopic systems outside physics (see [9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24], and references therein, where the main motivations suggesting the use of the tools originally developed in a quantum context to describe classical situations have been widely discussed). Therefore, in such a framework, the actors of the system we want to study are described by operators in a Hilbert space and not by ordinary functions. It is worth of being remarked that operatorial models for competing populations spatially distributed and able to migrate have been already proposed [25,26,27].
In this paper, we consider a system where two different populations in a patchy environment compete either locally (in the same cell) or nonlocally (in adjacent cells) and both are subject to migration phenomena with different mobilities. With respect to previous operatorial models for describing the dynamics of interacting populations, our description includes also a nonlocal competition mechanism. Moreover, in addition to the standard Heisenberg view to dynamics, we use also the approach of -induced dynamics (see [28,29,30,31], and references therein).
To the actors of the model we associate fermionic operators. This choice has two main motivations. The first one is of technical nature: in fact, the Hilbert space where the fermionic operators live is finite-dimensional, so that all the observables are bounded operators. The second one is concerned with the interpretation: the mean values of the observables (the number operators) over an initial condition can be thought of as local densities of the populations in the different cells [25].
The plan of the paper is the following. In Section 2, for the reader’s convenience, we briefly review few useful notions about quantum mechanics and the number representation for fermions. Then, we present our model, whose dynamics is assumed to be governed by a time-independent self-adjoint quadratic Hamiltonian operator: competition (both local and nonlocal) as well as migration effects are taken into account. The quadratic expression of the Hamiltonian implies that the differential equations, derived according to Heisenberg view, are linear, so that, at least formally, we can deduce analytically the solution. Section 2.1 briefly describes the -induced dynamics framework, and how this approach is used in our model. We also discuss the (social) meaning of the rules we use. In Section 3, we present some numerical simulations obtained by considering two different scenarios, and discuss the results, both in the case of the standard Heisenberg dynamics and when the method of -induced dynamics is used; the latter approach studies the evolution of the system, as ruled by the Hamiltonian, but with the action, at fixed instants, of some rules whose effect is that of modifying the values of some parameters entering the Hamiltonian (without modifying the structure of the Hamiltonian) as a consequence of the evolution of the system itself. In such a way, the model adjusts itself during the evolution; the introduction of such a variant can be thought of as a surreptitious way of describing the change of the attitudes of the populations during the evolution, without introducing a time dependence in the Hamiltonian or opening the system to the environment by considering a reservoir [32,33], so without additional technical difficulties. Various sets of rules are considered. In some applications already studied [28,29], the effect of the rules was that of allowing the system to approach asymptotic equilibrium states. Nevertheless, we observe that this behavior is not necessarily exhibited in our spatially distributed model, even if it introduces a sort of irreversibility in the evolution. Different sets of parameters and initial conditions are used, and the numerical results are discussed. Finally, Section 4 contains our concluding remarks, as well as some future extensions of the model to a two-dimensional spatial setting.
2. The Operatorial Model: Heisenberg Dynamics and -Induced Dynamics
In this Section, after briefly reviewing the basic notions of the fermionic operatorial formalism, we introduce the model we are interested in. We describe the actors of our system as well as their interactions embedded in a Hamiltonian operator. Then, adopting the Heisenberg viewpoint, we derive the differential equations ruling the dynamics.
The system we consider consists of two populations occupying a one-dimensional spatial region composed by N cells; in each cell, two different populations, say and , coexist and interact. Let and ( and , respectively) be the annihilation (creation, respectively) fermionic operators related to the two populations, where the subscript is a label for the cells of the spatial region; moreover, let be the corresponding number operators. According to the formalism of second quantization, annihilation and creation operators satisfy the canonical anticommutation relations
, , being the identity operator, and the Kronecker symbols, and the anticommutator between the operators u and v. The Hilbert space , where the operators are defined, is constructed as the linear span of the orthonormal set of vectors
i.e., is obtained by acting on the vacuum (i.e., the vector annihilated by all ) with the powers of the operators , where . As a consequence, .
The vector means that to the j-th population in the cell , a mean value equal to is initially assigned such that
The mean values of number operators over an initial condition , say
are interpreted as the local density of the population in the cell .
Let us assume the dynamics to be governed by a self-adjoint time-independent Hamiltonian operator . Its definition embodies the interactions among the agents of the system:
where
with , , , (, ) positive constants; moreover, the coefficients (), symmetric with respect to their indices, are equal to 1 if denotes a cell in the Moore neighborhood (the set of adjacent cells) and 0 elsewhere. Thus, the cells in the Moore neighborhood of the cell are labeled as and , whereas the cells labeled with 1 and N have only one neighbor (labeled 2 and , respectively).
Some comments about the various contributions in the Hamiltonian are in order:
is the free part of the Hamiltonian, and are parameters that can be interpreted as a measure of the inertia of the operators associated to the agents of : in fact, they can be thought of as a measure of the tendency of each degree of freedom to stay constant in time [9].
accounts for the local (i.e., in the same cell ) competitive interaction between the two populations; the coefficients give a measure of the strength of the interaction, and, when for all , there is no competition at all: the contribution is a competition term since the actor associated to is destroyed and the actor associated to is created; the adjoint term swaps the roles of the two actors.
takes into account a nonlocal competitive interaction between the two populations, and measures the strength of nonlocal interaction (absent if , ): in fact, the competition between the two populations occurs in adjacent cells.
is responsible for the diffusion of the two populations in the region, and is the mobility coefficient of population in the cell : the contribution is such that the actor associated to is destroyed and the actor associated to is created; once again, the adjoint term swaps the roles of the two actors.
The choice (that could seem too much restrictive) of considering a one-dimensional spatial region where the two populations interact and—with different mobilities—migrate is not just (or only) a trick to simplify the analysis. In fact, migratory phenomena are often observed along well-defined directions, e.g., from south to north; in such circumstances, a model where the two populations are assumed spatially distributed in a one–dimensional region can result appropriate.
Adopting the Heisenberg representation, the operators evolve in time according to the differential equations
where is the commutator between and . Using (7), because of the quadratic form of the Hamiltonian operator, we get a linear system of ordinary differential equations, say
for . In our one-dimensional setting, system (8) becomes:
The unknowns in (9) are operators represented by matrices with complex entries, whereupon, at least in principle, we have to solve a system of scalar ordinary differential equations in the complex domain. Nevertheless, because of the linearity of Equation (9), we are able to reduce drastically the computational complexity. In fact, introducing the formal column vector
( stands for the transposition operator) and a suitable real matrix (whose entries, once we fix N, can be constructed from (9)), the evolution equations for the annihilation operators can be written in the compact form as
Let us now consider the compact version of the evolution equations for the creation operators, say
where is a zero matrix of order ; actually, we do not need to consider the equations for the creation operators, but this simplifies the formulae for the mean values of the number operators (see below).
Let (, be the initial density of population in the cell , and let the vector with components
denoting with the generic entry of the matrix , it is easy to derive, by using the canonical anticommutation relations (1), the formula giving the mean values of the number operators (that is, the densities of the two populations in each cell) at time t:
where
Let us divide the region in three different subregions: a left region (), a central region (), and a right region (); this distinction is because we assume that some of the parameters entering the Hamiltonian are somehow different in the three subregions. Moreover, we will distinguish two different cases in order to simulate two different realistic scenarios.
The quadratic form of the Hamiltonian has an immediate consequence: the dynamic behavior that we can obtain in each cell is at most quasiperiodic. Furthermore, due to the relation
the Hamiltonian possesses a first integral, expressing the fact that the sum of the densities of the two populations in all the cells of the domain is constant in time.
More complex outcomes (not necessarily quasiperiodic) could be recovered by including terms of higher than quadratic order in the Hamiltonian. Nevertheless, in such a case, we would be forced to solve numerically a very huge number of differential equations. Another strategy to enrich the dynamics without rendering the problem computationally hard, if not impossible from a practical point of view, is the one introduced in a series of recent papers [28,29,30,31], where it was shown how to obtain more interesting dynamics still retaining a quadratic and time-independent Hermitian Hamiltonian.
2.1. -Induced Dynamics
According to the approach named -induced dynamics, we modify the standard Heisenberg dynamics by introducing some rules able to account for some effects hard to describe with a Hamiltonian, unless we do not consider explicitly a time-dependent Hamiltonian or work with an open quantum system including a reservoir [32,33], with consequent drastic increase of technical difficulties (see [30]).
The rule we consider is nothing more than a law that modifies periodically some of the values of the parameters involved in the Hamiltonian as a consequence of the evolution of the system, so that the effect is that the model adjusts itself during the time evolution; since the model involves some actors, the modifications of some of the parameters entering the Hamiltonian reflect some changes in the intensity of the interactions according to the evolution of their state. In other words, these modifications may be thought of as a surreptitious way to take into account the influence of the external world, even if this action is induced by the evolution of the model itself; actually, the evolution of the state of the system does influence the attitudes of the different actors!
Hereafter, we sketch briefly how the procedure works (see [30,31], and references therein, for further details). Let us consider a self-adjoint time-independent quadratic Hamiltonian operator ; according to the Heisenberg view, we compute, in a time interval of length , the evolution of annihilation and creation operators, whereupon, choosing an initial condition for the mean values of the number operators, obtain their time evolution (our observables). The values of the observables at time , or, better, their variations in the time interval , determine in some way a change on some of the parameters involved in , whereupon a new Hamiltonian operator arises. This has the same structure as , but (in general) involves different values of (some of) its parameters. Now, we follow the continuous evolution of the system under the action of this new Hamiltonian for the next time interval of length , and so on.
From a mathematical point of view, the rule is nothing more than a map acting on the space of the parameters of the Hamiltonian. The global evolution comes from a sequence of similar Hamiltonian operators, and the parameters entering the model turn out to be stepwise (in time) constant. Thus, taking a time interval where we follow the evolution of the system, and splitting it in (n is supposed, without loss of generality, an integer), subintervals of length , in the kth subinterval we have an Hermitian Hamiltonian ruling the dynamics. The global dynamics is obtained from a sequence of Hamiltonians, say
and the complete evolution in the interval is naturally obtained by glueing the local evolutions in each subinterval.
This kind of rule-induced stepwise dynamics does not imply the occurrence of jumps in the mean values of the number operators. In some sense, using the rule, we have a time-dependent Hamiltonian, but the time dependence has a very special form: in each interval [, the Hamiltonian does not depend on time, and no new technical difficulty arises. A comparison of this approach with that related to an explicitly time-dependent Hamiltonian is discussed in [30]. We use three different rules that are detailed below.
Fixing a value for (the choice of plays a role in the dynamics, as will be shown in the following), let us define
Let us consider three different set of rules by updating at fixed instants ( some of the parameters entering the Hamiltonian as follows:
Rule 1:
this means that the inertia parameter of the population in the cell increases (decreases) if the local density in the subinterval of length increases (decreases); due to the meaning of the inertia parameters, this means that a population increasing its local density tends to lower its tendency to change. The rationale of the rule is that an increase of the local density of a population in the cell has the effect of inducing a lower tendency to change, whereas a decrease induces the population to be less conservative.
Rule 2:
besides updating the inertia parameters like in Rule 1, we update the mobility parameters of the two populations according to the mean value of the local densities in each subregion: in this way, each population increases its mobility parameter if the mean variation of the densities in a subregion increases; essentially, the change of the mobility parameters accounts for a change in the attitude of the population so that an increase of the mobility parameters is a sort of reaction to overpopulation in each subregion.
Rule 3:
also in this case, the inertia parameters are updated as in Rule 1; however, the mobility parameters of each population change according to the mean variation of the densities in each subregion of the other population; this rule models a sort of escaping effect of a population when the local density of the other population increases.
3. Numerical Simulations
In this Section, we present various numerical simulations by using two special sets of initial conditions with the aim of describing real situations.
Let be a one-dimensional region made by cells, and let be the subregion made by the cells in the range 1–15, be the subregion made by the cells in the range 16–35, and be the subregion made by cells in the range 36–50. Two qualitatively different scenarios are considered. In both situations, we compare the numerical results obtained by the standard Heisenberg dynamics and those coming from the superposition of the Heisenberg dynamics with the rules described above.
3.1. First Scenario
Let us assume that initially in the left region, population is much more abundant than population , in the central region, both populations have comparable and very small local densities, whereas in the right region, population is much more abundant than population . This means that the central region is a sort of transit region from the subregion to .
Let us choose the following initial local densities for the two populations:
where denotes a random real number in the interval . Thus, the initial distributions of each population are uniform in the first and third region, whereas in the central region, both populations have very small random initial densities.
As far as the parameters are concerned, we make the following choices:
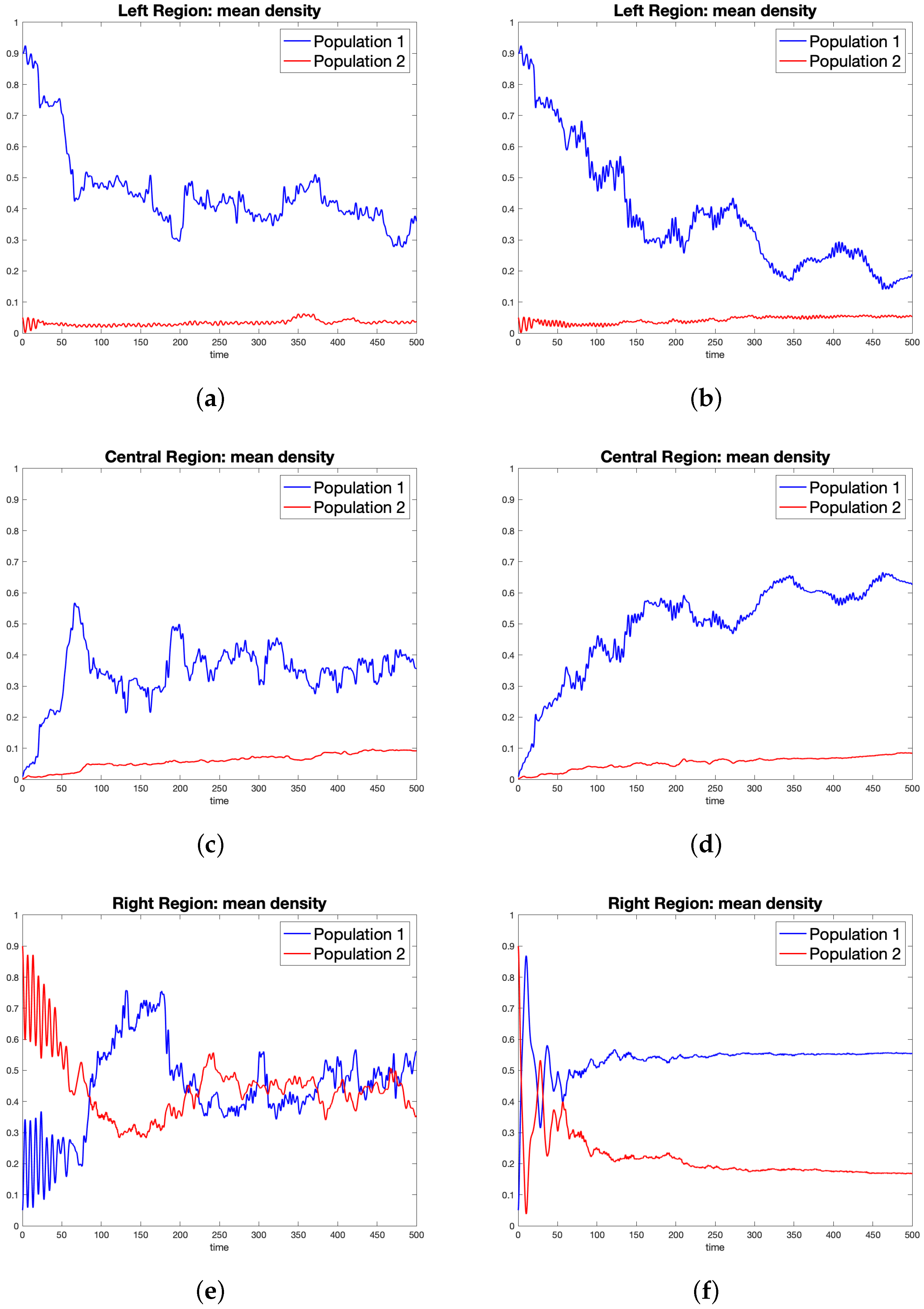
Each of the parameters entering the Hamiltonian is constant in each subregion; population possesses inertia parameters smaller than those of population , but greater mobility parameters ’s; the competitive interaction parameters in the first and third subregions are greater than those in the central subregion, and the nonlocal interaction is weaker than the local one. Moreover, the parameters responsible for competition ( and ) are very small in the central region, and have their maximum in the right region. The concrete situation we want to describe is the following one. The left subregion could be thought of as a poor region, the right subregion as a rich region, and the central subregion as the region that the poorer population needs to cross with the aim of going to the richest subregion and improving its wealth. Such a situation is somehow similar to the one considered in [25], where a model including only local competition and migration (without any rule) has been investigated. As clearly shown in Figure 1b,d,f for the rule 1, the dynamical outcome is rather different if we take into account the -induced dynamics approach.
Without the rules, the behavior of the local density in each cell is oscillatory, although the migration terms tend to make the densities uniform all over the three subregions. It is observed that both populations move to the right cells, and this effect is more evident for population (Figure 1a,c,e); also, due to the structure of the Hamiltonian (and, consequently, to the quasiperiodic regime), the local densities do not definitely increase moving from the left to the right. On the contrary, a clear movement from left to right emerges when the rules are considered (Figure 1b,d,f for the rule 1). In the classical Heisenberg dynamics (no rule at all), population tends to move towards the subregion : at least in the time interval , the mean local density of decreases in , and increases in and . On the contrary, the mean local density of population increases in , has a small variation in , and decreases in . Nevertheless, due to the quasiperiodic regime, this trend is not preserved for all times. Using rule 1 (Figure 1b,d,f), this movement of population towards subregion is much more evident than the movement of population , and this is reasonable because of the different mobility parameters. Here, it is worth of being remarked that, in the right region, the mean local densities of the two populations tend to approach a sort of equilibrium; moreover, there is also an inversion, in the sense that population becomes more abundant than population (this is due to the initial values of inertia parameters of the two populations: population has a greater tendency to change with respect to population ). The quasiperiodic regime of the classical Heisenberg dynamics is modified by the effect of the rule that introduces a sort of irreversibility in the evolution, even if the sum of the local densities of the two populations in all cells remains constant, that is, the rule preserves the existence of the first integral.
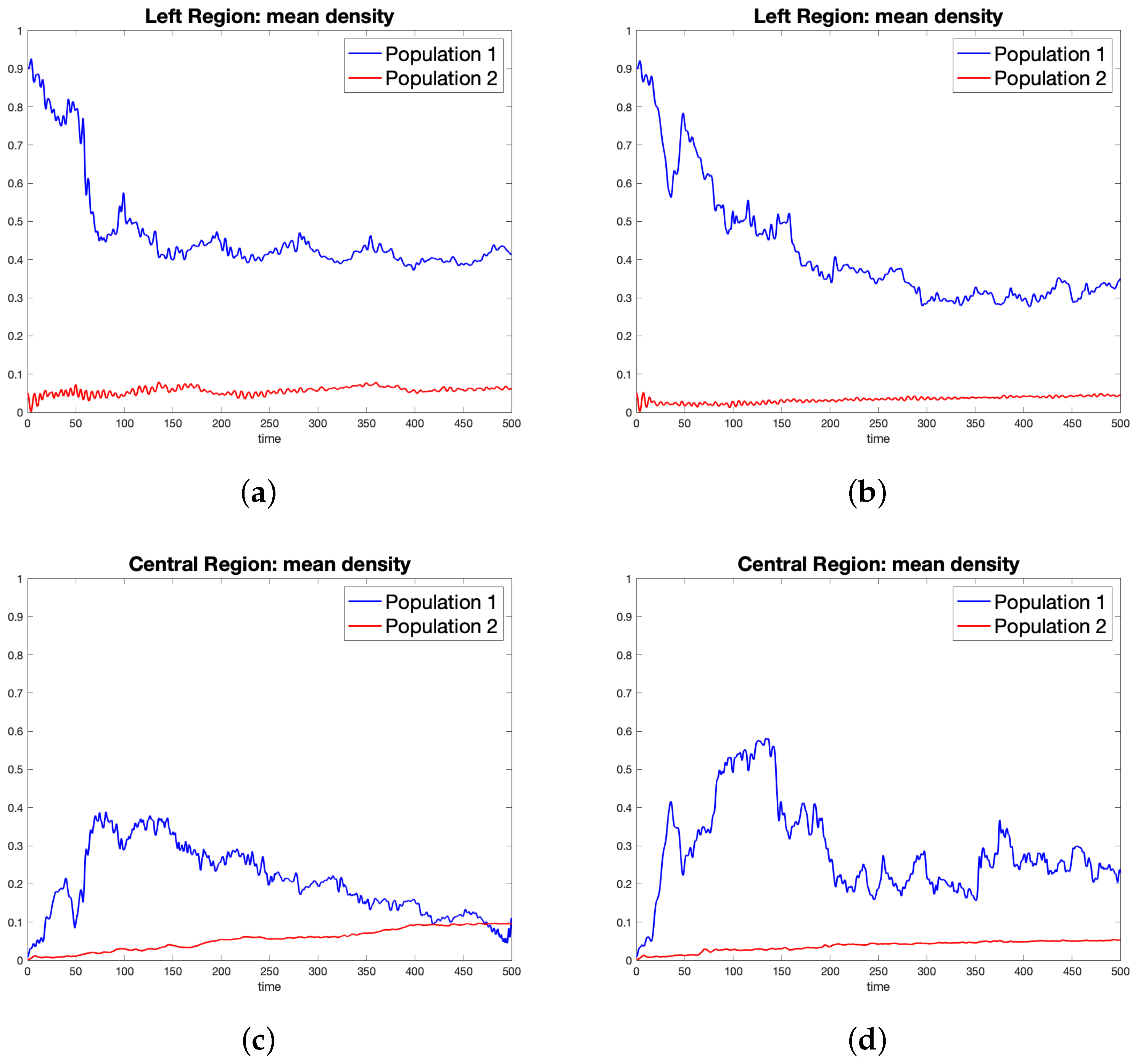
The same general considerations, though the dynamical outcomes are somehow different, apply also when the rules 2 and 3 are used. In fact, the effects of the rules 2 and 3 (one again with the choice ), that modify also the mobility parameters, are shown in Figure 2, where the migration of both populations towards the right cell has a more definite trend; moreover, it is observed that the amplitude of the oscillations of the mean densities in the three subregions decreases with time.
3.2. Second Scenario
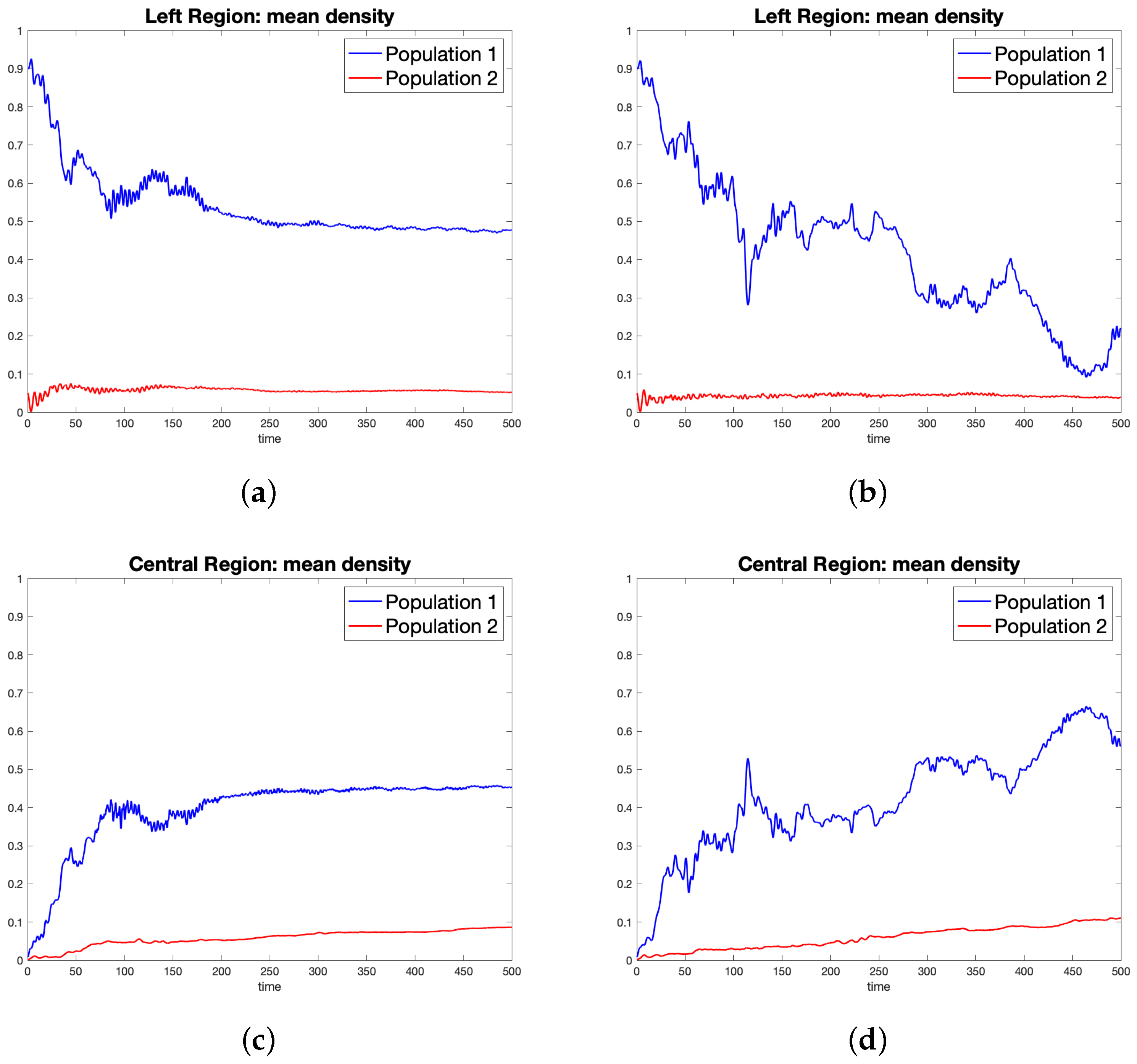
Here, the only difference with respect to the previous case is that the central region is not sparsely inhabited even if population is more abundant than population ; in some sense, the central subregion is not a transit area but a region with intermediate conditions of wealth.
We assume the following initial conditions:
As far as the choice of parameters is concerned, we choose
Similar considerations as above can be made also in the second scenario, and the effect of the rules (Figure 3b,d,f and Figure 4) is evident with respect to the outcomes of the classical Heisenberg dynamics.
3.3. The Role of
In the -induced dynamics approach, the choice of the value of , that is, the length of the time interval after which some of the parameters entering the Hamiltonian are changed, has its influence on the time evolution. This is shown in Figure 5, Figure 6 and Figure 7 (for the first scenario), and Figure 8, Figure 9 and Figure 10 (for the second scenario).
4. Conclusions
In this paper, we constructed an operatorial model based on fermionic ladder operators to describe the dynamical behavior of two populations competing each other and able to diffuse in a one-dimensional spatial region made by a finite number of adjacent cells; the two populations compete locally (in the same cell) and nonlocally (in the adjacent cells). The mean values of the number operators associated with the two populations in a cell are interpreted as a measure of their local density in the cell. The dynamics is ruled by a self-adjoint and time-independent quadratic Hamiltonian operator; consequently, adopting the classical Heisenberg viewpoint, the dynamics is ruled by linear differential equations. To enrich the dynamics, we introduced some rules and used the recently introduced -induced dynamics approach. Two different scenarios and three different sets of rules have been considered and the corresponding numerical results have been presented.
The dynamical outcomes show that this model is compatible with the coexistence of the two competing populations in the same environment. The model is susceptible of various extensions and generalizations. For instance, we may include in the Hamiltonian effects due to cooperative interactions between the two populations, as well as construct a spatial model in a two-dimensional region, thereby extending the results given in [25], where the approach of -induced dynamics has not been used. Some of these extensions are currently planned and will be the subject of a forthcoming paper.
Author Contributions
Conceptualization: G.I. and F.O.; methodology: F.O.; formal analysis: G.I. and F.O.; investigation: G.I. and F.O.; original draft preparation: G.I. and F.O.; review and editing: G.I. and F.O. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors acknowledge the support of “Gruppo Nazionale di Fisica Matematica” (GNFM) of “Ìstituto Nazionale di Alta Matematica” (INdAM).
Conflicts of Interest
The authors declare no conflict of interest.
References
Slatkin, M. Competition and regional coexistence. Ecology1974, 55, 128–134. [Google Scholar] [CrossRef]
Hanski, I. Coexistence of competitors in patchy environment with and without predation. Oikos1981, 37, 306–312. [Google Scholar] [CrossRef]
Hanski, I. Coexistence of competitors in patchy environment. Ecology2013, 64, 493–500. [Google Scholar] [CrossRef]
Ives, A.R.; May, R.M. Competition within and between species in a patchy environment: Relations between microscopic and macroscopic models. J. Theor. Biol.1985, 115, 65–92. [Google Scholar] [CrossRef]
Hanski, I. Spatial patterns of coexistence of competing species in patchy habitat. Theor. Ecol.2008, 1, 29–43. [Google Scholar] [CrossRef]
Murray, J.D. Mathematical Biology II: Spatial Models and Biomedical Applications, 3rd ed.; Springer: New York, NY, USA, 2003. [Google Scholar]
Roman, P. Advanced Quantum Mechanics; Addison-Wesley: New York, NY, USA, 1965. [Google Scholar]
Merzbacher, E. Quantum Mechanics, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1998. [Google Scholar]
Bagarello, F. Quantum Dynamics for Classical Systems: With Applications of the Number Operator; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]
Bagarello, F. Quantum Concepts in the Social, Ecological and Biological Sciences; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
Bagarello, F. An operatorial approach to stock markets. J. Phys. A Gen. Phys.2006, 39, 6823–6840. [Google Scholar] [CrossRef]
Bagarello, F. Stock markets and quantum dynamics: A second quantized description. Physica A2007, 386, 283–302. [Google Scholar] [CrossRef][Green Version]
Bagarello, F. Simplified stock markets described by number operators. Rep. Math. Phys.2009, 63, 381–398. [Google Scholar] [CrossRef][Green Version]
Bagarello, F. A quantum statistical approach to simplified stock markets. Physica A2009, 388, 4397–4406. [Google Scholar] [CrossRef]
Haven, E.; Khrennikov, A. Quantum Social Science; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
Khrennikov, A. Ubiquitous Quantum Structure: From Psychology to Finances; Springer: Berlin, Germany, 2010. [Google Scholar]
Busemeyer, J.R.; Bruza, P.D. Quantum Models of Cognition and Decision; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
Asano, M.; Ohya, M.; Tanaka, Y.; Basieva, I.; Khrennikov, A. Quantum-like model of brain’s functioning: Decision making from decoherence. J. Theor. Biol.2011, 281, 56–64. [Google Scholar] [CrossRef]
Asano, M.; Ohya, M.; Tanaka, Y.; Basieva, I.; Khrennikov, A. Quantum-like dynamics of decision-making. Physica A2012, 391, 2083–2099. [Google Scholar] [CrossRef]
Bagarello, F.; Haven, E. First results on applying a non-linear effect formalism to alliances between political parties and buy and sell dynamics. Physica A2016, 444, 403–414. [Google Scholar] [CrossRef][Green Version]
Bagarello, F. An improved model of alliances between political parties. Ric. Mat.2016, 65, 399–412. [Google Scholar] [CrossRef]
Khrennikova, P.; Haven, E. Instability of political preferences and the role of mass media: A dynamical representation in a quantum framework. Philos. Trans. R. Soc. A2016, 374, 20150106. [Google Scholar] [CrossRef]
Bagarello, F.; Gargano, F. Modeling interactions between political parties and electors. Physica A2017, 248, 243–264. [Google Scholar] [CrossRef][Green Version]
Bagarello, F.; Oliveri, F. An operator description of interactions between populations with applications to migration. Math. Mod. Methods Appl. Sci.2013, 23, 471–492. [Google Scholar] [CrossRef]
Gargano, F.; Tamburino, L.; Bagarello, F.; Bravo, G. Large-scale effects of migration and conflict in pre-agricultural groups: Insights from a dynamic model. PLoS ONE2017, 12, e0172262. [Google Scholar] [CrossRef]
Gargano, F. Population dynamics based on ladder bosonic operators. Appl. Math. Model.2021, 96, 39–52. [Google Scholar] [CrossRef]
Bagarello, F.; Di Salvo, R.; Gargano, F.; Oliveri, F. (H,ρ)-induced dynamics and the quantum game of life. Appl. Math. Model.2017, 43, 15–32. [Google Scholar] [CrossRef]
Di Salvo, R.; Oliveri, F. An operatorial model for complex political system dynamics. Math. Meth. Appl. Sci.2017, 40, 5668–5682. [Google Scholar] [CrossRef]
Bagarello, F.; Di Salvo, R.; Gargano, F.; Oliveri, F. (H,ρ)-induced dynamics and large time behaviors. Physica A2018, 505, 355–373. [Google Scholar] [CrossRef]
Di Salvo, R.; Gorgone, M.; Oliveri, F. Generalized Hamiltonian for a two-mode fermionic model and asymptotic equilibria. Physica A2020, 540, 12032. [Google Scholar] [CrossRef]
Davies, E.B. Quantum Theory of Open Systems; Academic Press: London, UK, 1976. [Google Scholar]
Khrennikova, P.; Haven, E.; Khrennikov, A. An application of the theory of open quantum systems to model the dynamics of party governance in the US Political System. Int. J. Theor. Phys.2014, 53, 1346–1360. [Google Scholar] [CrossRef]
Figure 1.
Time evolution (standard Heisenberg dynamics with no rule) of the mean local densities in subregion (a), subregion (c), and subregion (e). The subfigures (b,d,f) display the time evolution in the framework of -induced dynamics with rule 1 and .
Figure 1.
Time evolution (standard Heisenberg dynamics with no rule) of the mean local densities in subregion (a), subregion (c), and subregion (e). The subfigures (b,d,f) display the time evolution in the framework of -induced dynamics with rule 1 and .
Figure 2.
First scenario: time evolution of the mean of local densities in the three subregions; rule 2 (subfigures (a,c,e)), and rule 3 (subfigures (b,d,f)); .
Figure 2.
First scenario: time evolution of the mean of local densities in the three subregions; rule 2 (subfigures (a,c,e)), and rule 3 (subfigures (b,d,f)); .
Figure 3.
Second scenario: time evolution of the mean of local densities in the three subregions; classic Heisenberg dynamics (subfigures (a,c,e)), and rule 1 with (subfigures (b,d,f)).
Figure 3.
Second scenario: time evolution of the mean of local densities in the three subregions; classic Heisenberg dynamics (subfigures (a,c,e)), and rule 1 with (subfigures (b,d,f)).
Figure 4.
Second scenario: time evolution of the mean of local densities in the three subregions; rule 2 (subfigures (a,c,e)) and rule 3 rule 1 with (subfigures (b,d,f)); the value has been used.
Figure 4.
Second scenario: time evolution of the mean of local densities in the three subregions; rule 2 (subfigures (a,c,e)) and rule 3 rule 1 with (subfigures (b,d,f)); the value has been used.
Figure 5.
First scenario, -induced dynamics with rule 1: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 5.
First scenario, -induced dynamics with rule 1: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 6.
First scenario, -induced dynamics with rule 2: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 6.
First scenario, -induced dynamics with rule 2: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 7.
First scenario, -induced dynamics with rule 3: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 7.
First scenario, -induced dynamics with rule 3: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 8.
Second scenario, -induced dynamics with rule 1: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 8.
Second scenario, -induced dynamics with rule 1: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 9.
Second scenario, -induced dynamics with rule 2: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 9.
Second scenario, -induced dynamics with rule 2: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 10.
Second scenario, -induced dynamics with rule 3: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Figure 10.
Second scenario, -induced dynamics with rule 3: (subfigures (a,c,e)) and (subfigures (b,d,f)).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Inferrera, G.; Oliveri, F.
Operatorial Formulation of a Model of Spatially Distributed Competing Populations. Dynamics2022, 2, 414-433.
https://doi.org/10.3390/dynamics2040024
AMA Style
Inferrera G, Oliveri F.
Operatorial Formulation of a Model of Spatially Distributed Competing Populations. Dynamics. 2022; 2(4):414-433.
https://doi.org/10.3390/dynamics2040024
Chicago/Turabian Style
Inferrera, Guglielmo, and Francesco Oliveri.
2022. "Operatorial Formulation of a Model of Spatially Distributed Competing Populations" Dynamics 2, no. 4: 414-433.
https://doi.org/10.3390/dynamics2040024
APA Style
Inferrera, G., & Oliveri, F.
(2022). Operatorial Formulation of a Model of Spatially Distributed Competing Populations. Dynamics, 2(4), 414-433.
https://doi.org/10.3390/dynamics2040024
Article Metrics
No
No
Article Access Statistics
For more information on the journal statistics, click here.
Multiple requests from the same IP address are counted as one view.
Inferrera, G.; Oliveri, F.
Operatorial Formulation of a Model of Spatially Distributed Competing Populations. Dynamics2022, 2, 414-433.
https://doi.org/10.3390/dynamics2040024
AMA Style
Inferrera G, Oliveri F.
Operatorial Formulation of a Model of Spatially Distributed Competing Populations. Dynamics. 2022; 2(4):414-433.
https://doi.org/10.3390/dynamics2040024
Chicago/Turabian Style
Inferrera, Guglielmo, and Francesco Oliveri.
2022. "Operatorial Formulation of a Model of Spatially Distributed Competing Populations" Dynamics 2, no. 4: 414-433.
https://doi.org/10.3390/dynamics2040024
APA Style
Inferrera, G., & Oliveri, F.
(2022). Operatorial Formulation of a Model of Spatially Distributed Competing Populations. Dynamics, 2(4), 414-433.
https://doi.org/10.3390/dynamics2040024



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















