
Drone and Robotics Roadmap for Agriculture Crops in Pakistan: A Review †


 ,
,  ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Smart Applications and Robotics
3. Conclusions
- The use of automation and intelligent systems in irrigation will help to improve irrigation efficiency and lower water waste.
- The use of automation and intelligent systems in the food industry also aids in determining the best chemicals and pesticides to use for agricultural purposes.
- Automatic and intelligent systems help pick out and manage weeds. The multitasking robots will support agricultural activities and processes, as well as finish the task quickly, preserve the product’s quality, and reduce the need for human effort.
- We will be able to supply information on the humidity, temperature, and water level thanks to the hybrid agricultural systems.
- We can streamline the agricultural process and choose the best weed, crop, and pesticides by better utilizing automation and IoT in the sector of agriculture.
- On the other side, automation and IoT systems offer solutions and make the agricultural process more predictable.
- These technologies will contribute to reducing human labor requirements and raising production.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Azam, A.; Shafique, M. Agriculture in Pakistan and its Impact on Economy—A Review. Int. J. Adv. Sci. Technol. 2017, 103, 47–60. [Google Scholar] [CrossRef]
- Waqas, M.S.; Cheema, M.J.M.; Hussain, S.; Ullah, M.K.; Iqbal, M.M. Delayed irrigation: An approach to enhance crop water productivity and to investigate its effects on potato yield and growth parameters. Agric. Water Manag. 2021, 245, 106576. [Google Scholar] [CrossRef]
- Malik, S.; Hussain, S.; Waqas, M.S. Effect of water quality and different meals on growth of Catla catla and Labeo rohita. Big Data Water Resour. Eng. 2020, 1, 4–8. [Google Scholar] [CrossRef]
- Altintas, Y.; Croft, E.A. Electro-mechanical design engineering: A progress report and future directions for mechatronics education. Int. J. Mech. Eng. Educ. 2002, 30, 325–339. [Google Scholar] [CrossRef]
- Waqas, M.S.; Cheema, M.J.M.; Waqas, A.; Hussain, S. Enhancing water productivity of potato (Solanum tuberosum L.) through drip irrigation system. In Proceedings of the 2nd International Conference on Horticultural Sciences, Faisalabad, Pakistan, 18–20 February 2016; pp. 18–20. [Google Scholar]
- Kuru, K.; Yetgin, H. Transformation to advanced mechatronics systems within new industrial revolution: A novel framework in automation of everything (AoE). IEEE Access 2019, 7, 41395–41415. [Google Scholar] [CrossRef]
- Grau, J.; Anton, J.; Packianather, M.; Ermolov, I.; Aphanasiev, R.; Cisneros, J.; Cortina-Januchs, M.; Jevtić, A.; Andina, D. Sustainable agriculture using an intelligent mechatronic system. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 3416–3421. [Google Scholar]
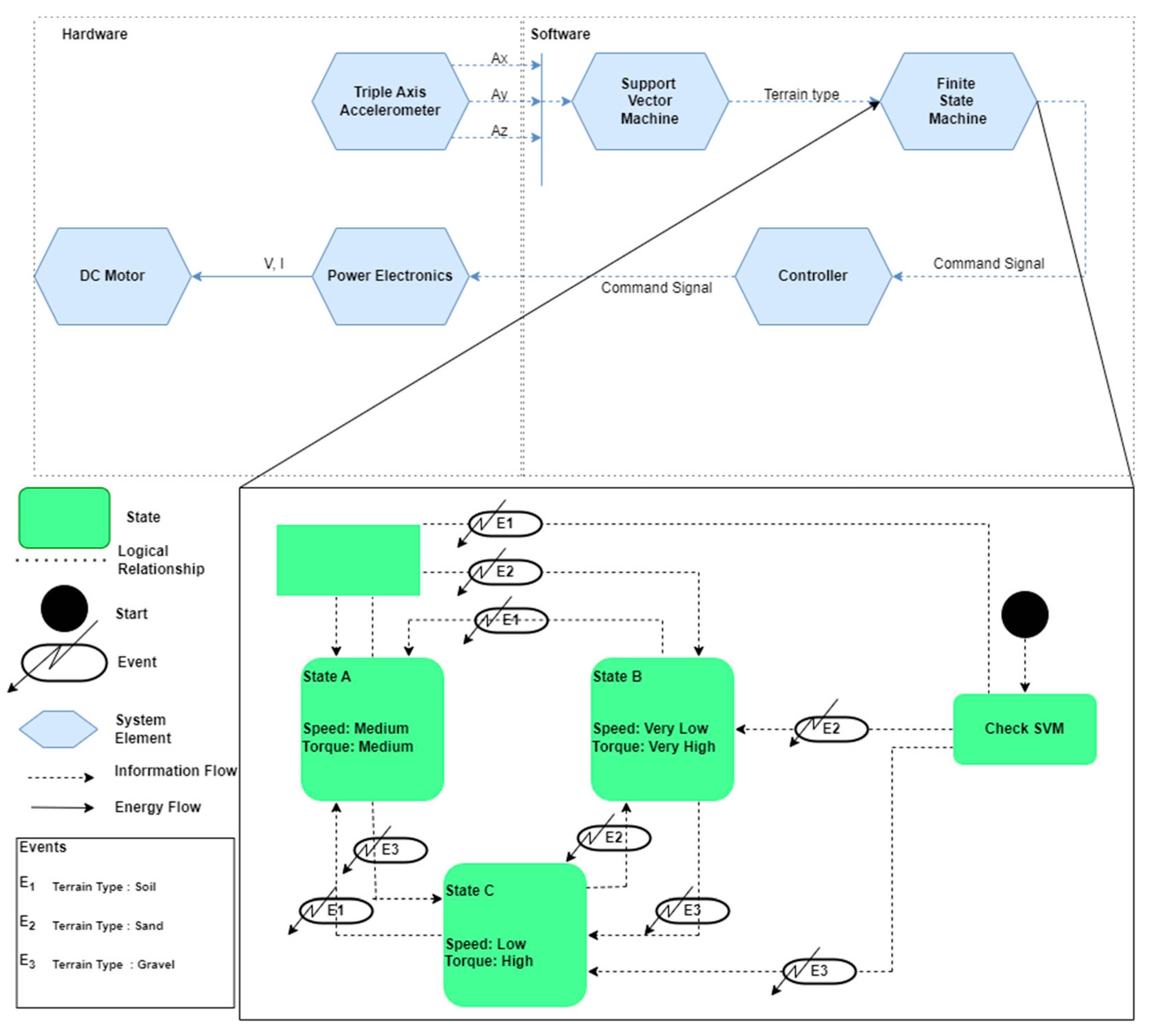
- Mahadhir, K.A.; Tan, S.C.; Low, C.Y.; Dumitrescu, R.; Amin, A.T.M.; Jaffar, A. Terrain classification for track-driven agricultural robots. Procedia Technol. 2014, 15, 775–782. [Google Scholar] [CrossRef]
- Slaughter, D.C.; Giles, D.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
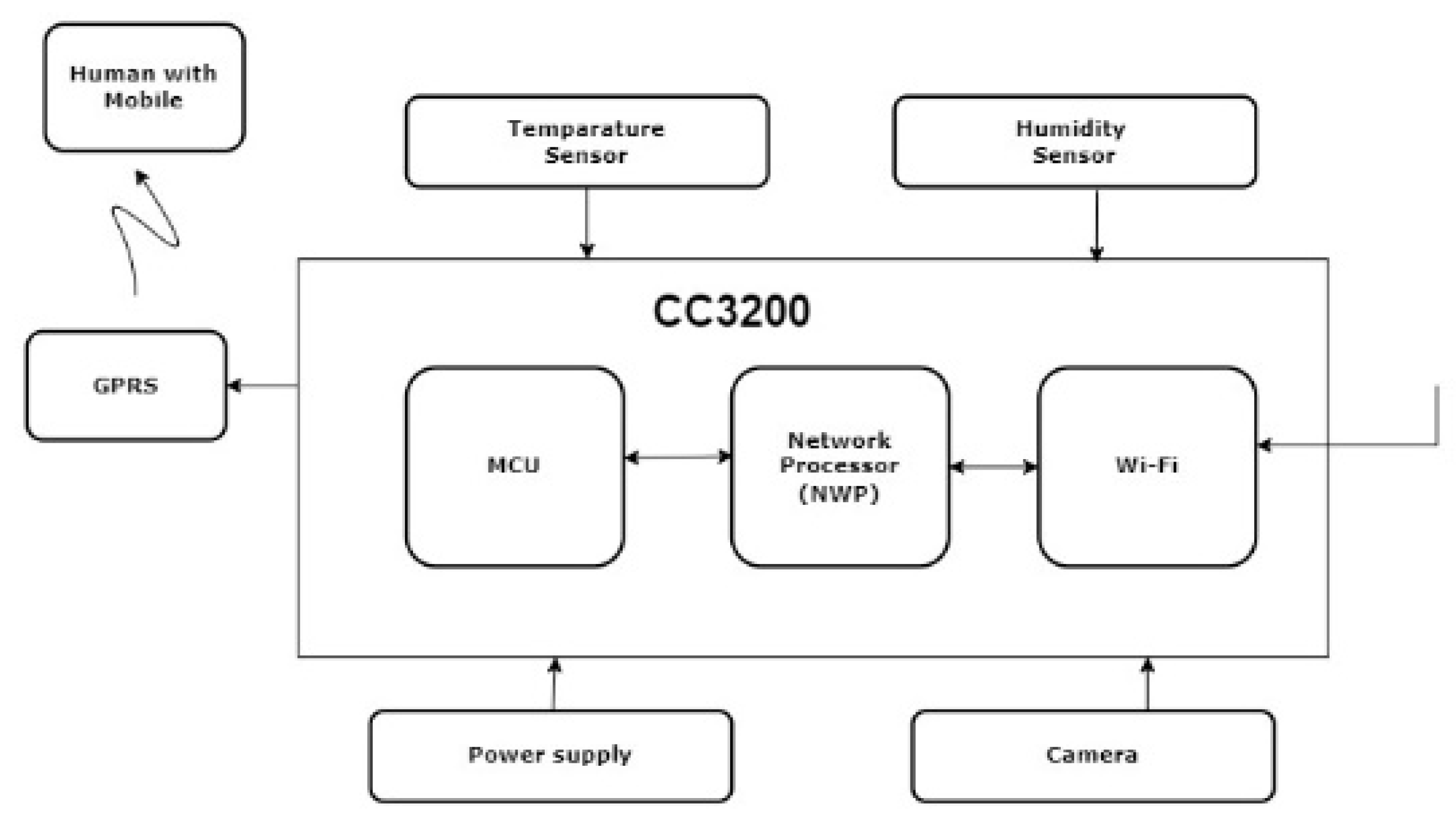
- Saptasagare, V.S.; Kodada, B.B. Real-time implementation and analysis of crop-field for agriculture management system based on microcontroller with GPRS (M-GPRS) and SMS. Int. J. Comput. Appl. 2014, 98, 1–6. [Google Scholar] [CrossRef]
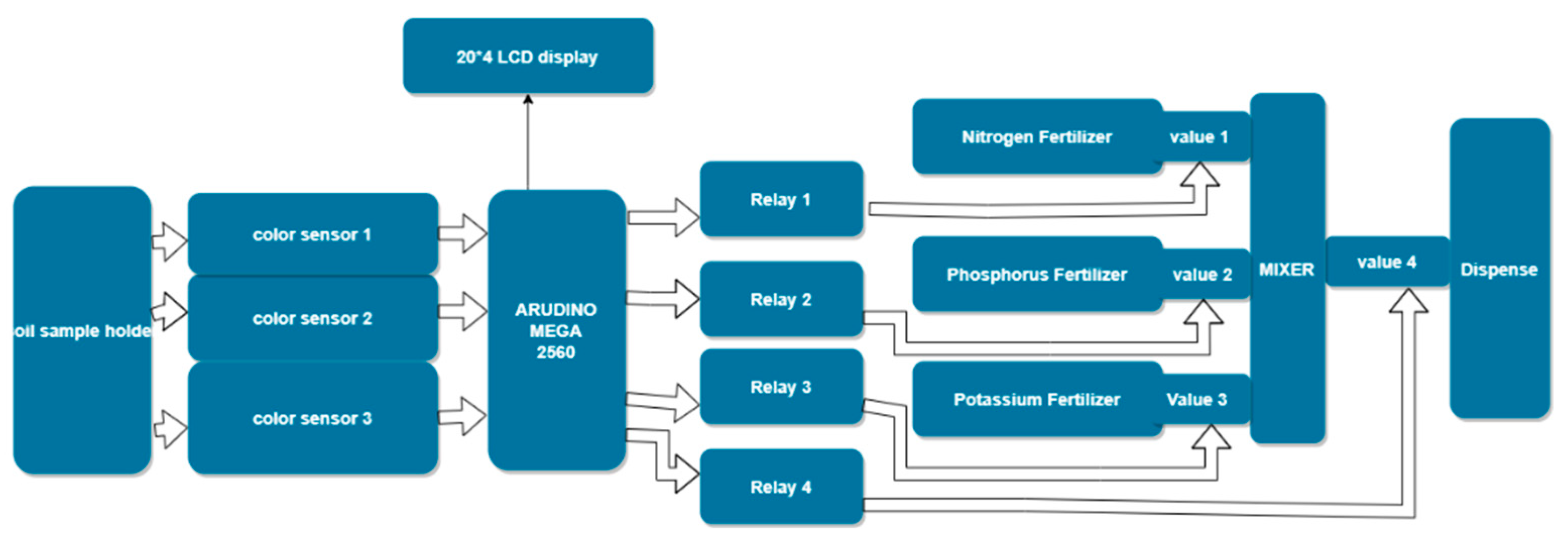
- Amrutha, A.; Lekha, R.; Sreedevi, A. Automatic soil nutrient detection and fertilizer dispensary system. In Proceedings of the 2016 International Conference on Robotics: Current Trends and Future Challenges (RCTFC), Thanjavur, India, 19–20 December 2016; pp. 1–5. [Google Scholar]
- Chang, C.-L.; Lin, K.-M. Smart agricultural machine with a computer vision-based weeding and variable-rate irrigation scheme. Robotics 2018, 7, 38. [Google Scholar] [CrossRef]
- Vellidis, G.; Tucker, M.; Perry, C.; Kvien, C.; Bednarz, C. A real-time wireless smart sensor array for scheduling irrigation. Comput. Electron. Agric. 2008, 61, 44–50. [Google Scholar] [CrossRef]
- Aqeel-ur-Rehman, Z.A.S.; Shaikh, N.A.; Islam, N. An integrated framework to develop context-aware sensor grid for agriculture. Aust. J. Basic Appl. Sci. 2010, 4, 922–931. [Google Scholar]
- Li, H.; Wang, H.-j.; Shang, Z.; Li, Q.-h.; Xiao, W. Application of RFID in agricultural seed quality tracking system. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 3073–3077. [Google Scholar]
- Prathibha, S.; Hongal, A.; Jyothi, M. IoT based monitoring system in smart agriculture. In Proceedings of the 2017 International Conference on Recent Advances in Electronics and Communication Technology (ICRAECT), Bangalore, India, 16-17 March 2017; pp. 81–84. [Google Scholar]
- Halme, A.; Luksch, T.; Ylönen, S. Biomimicing motion control of the WorkPartner robot. Ind. Robot Int. J. 2004, 31, 209–217. [Google Scholar] [CrossRef]
- Giri, A.; Dutta, S.; Neogy, S. Enabling agricultural automation to optimize utilization of water, fertilizer and insecticides by implementing Internet of Things (IoT). In Proceedings of the 2016 International Conference on Information Technology (InCITe)—The Next Generation IT Summit on the Theme-Internet of Things: Connect your Worlds, Noida, India, 6–7 October 2016; pp. 125–131. [Google Scholar]
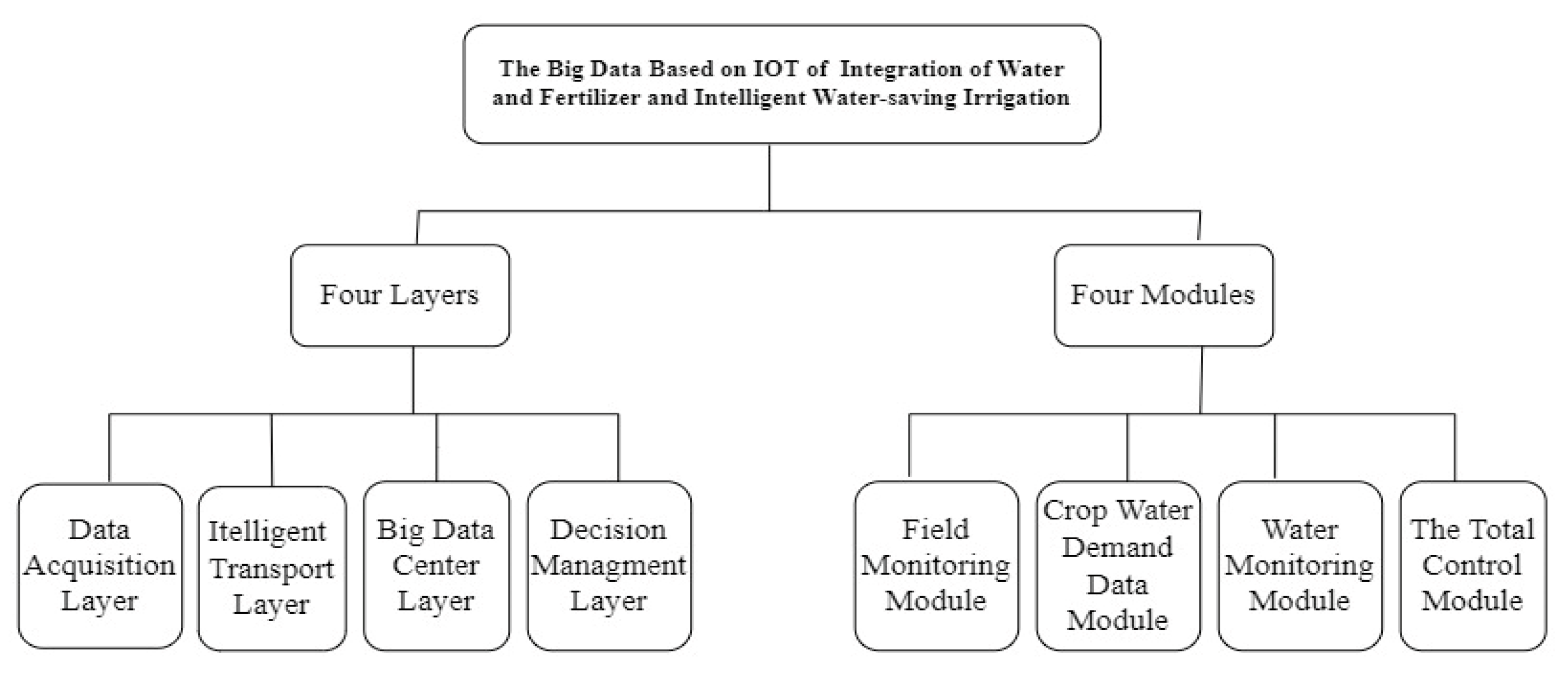
- Zhang, P.; Zhang, Q.; Liu, F.; Li, J.; Cao, N.; Song, C. The construction of the integration of water and fertilizer smart water saving irrigation system based on big data. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 21–24 July 2017; pp. 392–397. [Google Scholar]
- Suakanto, S.; Engel, V.J.; Hutagalung, M.; Angela, D. Sensor networks data acquisition and task management for decision support of smart farming. In Proceedings of the 2016 International Conference on Information Technology Systems and Innovation (ICITSI), Bandung, Indonesia, 24–27 October 2016; pp. 1–5. [Google Scholar]
- Bacco, M.; Berton, A.; Ferro, E.; Gennaro, C.; Gotta, A.; Matteoli, S.; Paonessa, F.; Ruggeri, M.; Virone, G.; Zanella, A. Smart farming: Opportunities, challenges and technology enablers. In Proceedings of the 2018 IoT Vertical and Topical Summit on Agriculture-Tuscany (IOT Tuscany), Tuscany, Italy, 8–9 May 2018; pp. 1–6. [Google Scholar]
- Zhang, M.; Meng, Q. Automatic citrus canker detection from leaf images captured in field. Pattern Recognit. Lett. 2011, 32, 2036–2046. [Google Scholar] [CrossRef]
- Rumpf, T.; Mahlein, A.-K.; Steiner, U.; Oerke, E.-C.; Dehne, H.-W.; Plümer, L. Early detection and classification of plant diseases with support vector machines based on hyperspectral reflectance. Comput. Electron. Agric. 2010, 74, 91–99. [Google Scholar] [CrossRef]
- Meivel, S.; Dinakaran, K.; Gandhiraj, N.; Srinivasan, M. Remote sensing for UREA Spraying Agricultural (UAV) system. In Proceedings of the 2016 3rd International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 22–23 January 2016; pp. 1–6. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
ur Rehman, U.; Iqbal, T.; Hussain, S.; Cheema, M.J.M.; Iqbal, F.; Basit, A. Drone and Robotics Roadmap for Agriculture Crops in Pakistan: A Review. Environ. Sci. Proc. 2022, 23, 39. https://doi.org/10.3390/environsciproc2022023039
ur Rehman U, Iqbal T, Hussain S, Cheema MJM, Iqbal F, Basit A. Drone and Robotics Roadmap for Agriculture Crops in Pakistan: A Review. Environmental Sciences Proceedings. 2022; 23(1):39. https://doi.org/10.3390/environsciproc2022023039
Chicago/Turabian Styleur Rehman, Ubaid, Tahir Iqbal, Saddam Hussain, Muhammad Jehanzeb Masud Cheema, Fahad Iqbal, and Abdul Basit. 2022. "Drone and Robotics Roadmap for Agriculture Crops in Pakistan: A Review" Environmental Sciences Proceedings 23, no. 1: 39. https://doi.org/10.3390/environsciproc2022023039
APA Styleur Rehman, U., Iqbal, T., Hussain, S., Cheema, M. J. M., Iqbal, F., & Basit, A. (2022). Drone and Robotics Roadmap for Agriculture Crops in Pakistan: A Review. Environmental Sciences Proceedings, 23(1), 39. https://doi.org/10.3390/environsciproc2022023039