
Robust Frequency Regulation Management System in a Renewable Hybrid Energy Network with Integrated Storage Solutions


Abstract
1. Introduction
1.1. Overview and Motivation
1.2. Literture Survey
1.3. Contribution and Objective
- To maintain grid stability by designing hybrid energy storage systems that help balance supply and demand, ensuring that the grid frequency remains stable;
- To achieve a fast response system that provides quick response times to fluctuations in grid frequency, correcting imbalances faster than traditional methods;
- To design a robust energy management system with a formulation of an advanced fractional order controller;
- To improve the efficiency of the overall system by storing excess energy during low demand and discharging during high demand, this advances overall grid efficiency.
1.4. Flow of the Paper
2. Overall System Description
3. Design of Frequency Regulation Management System
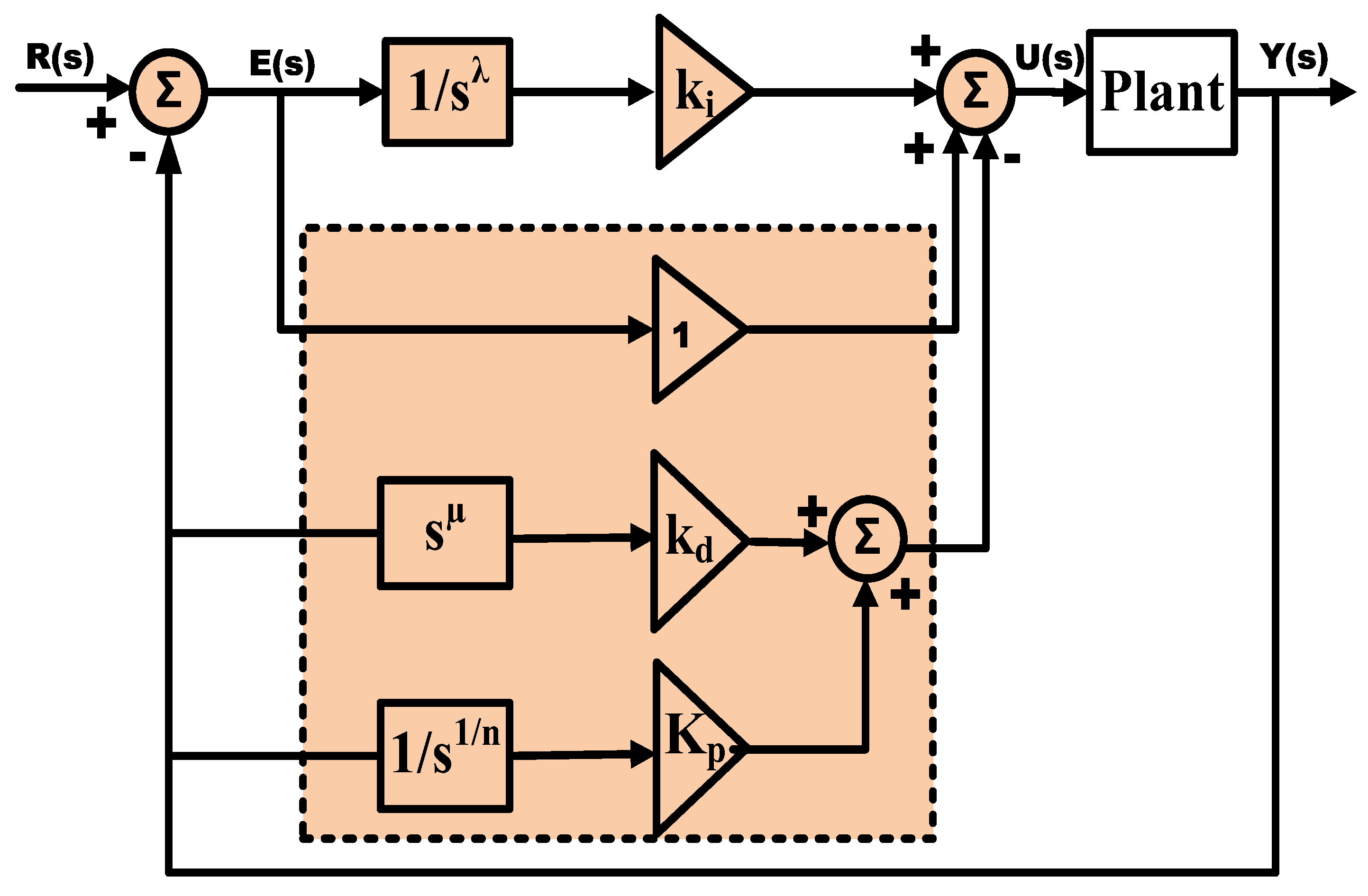
3.1. Robust 1+ Modified Fractional Order PID Controller Formulation
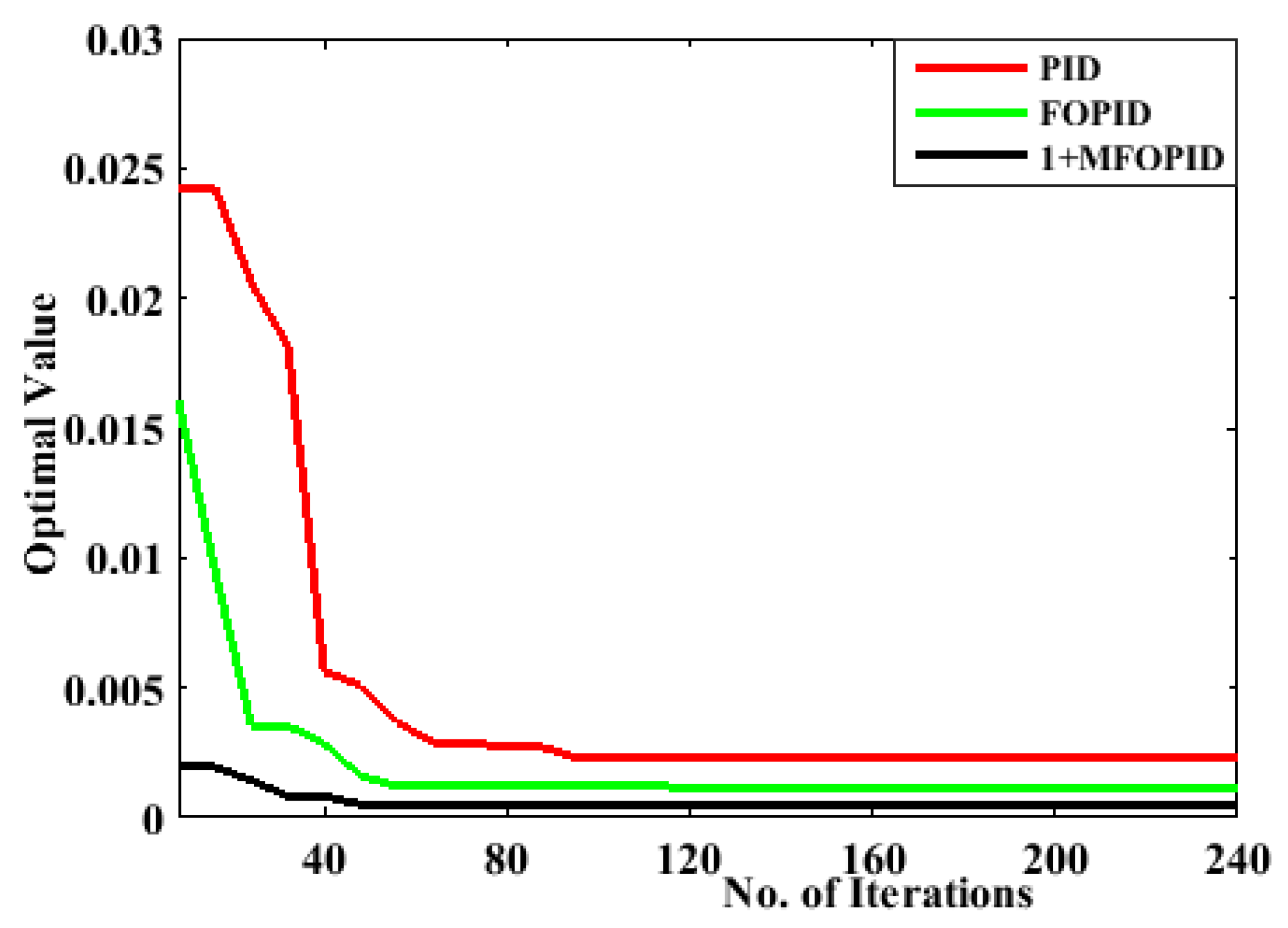
3.2. Development of New Variant of Objective Function
4. Overview of Optimization Technique
5. Result Analysis and Discussion
5.1. Stability Analysis
5.2. System Response with the Proposed Controller
5.3. Performance of Different Energy Storage Systems
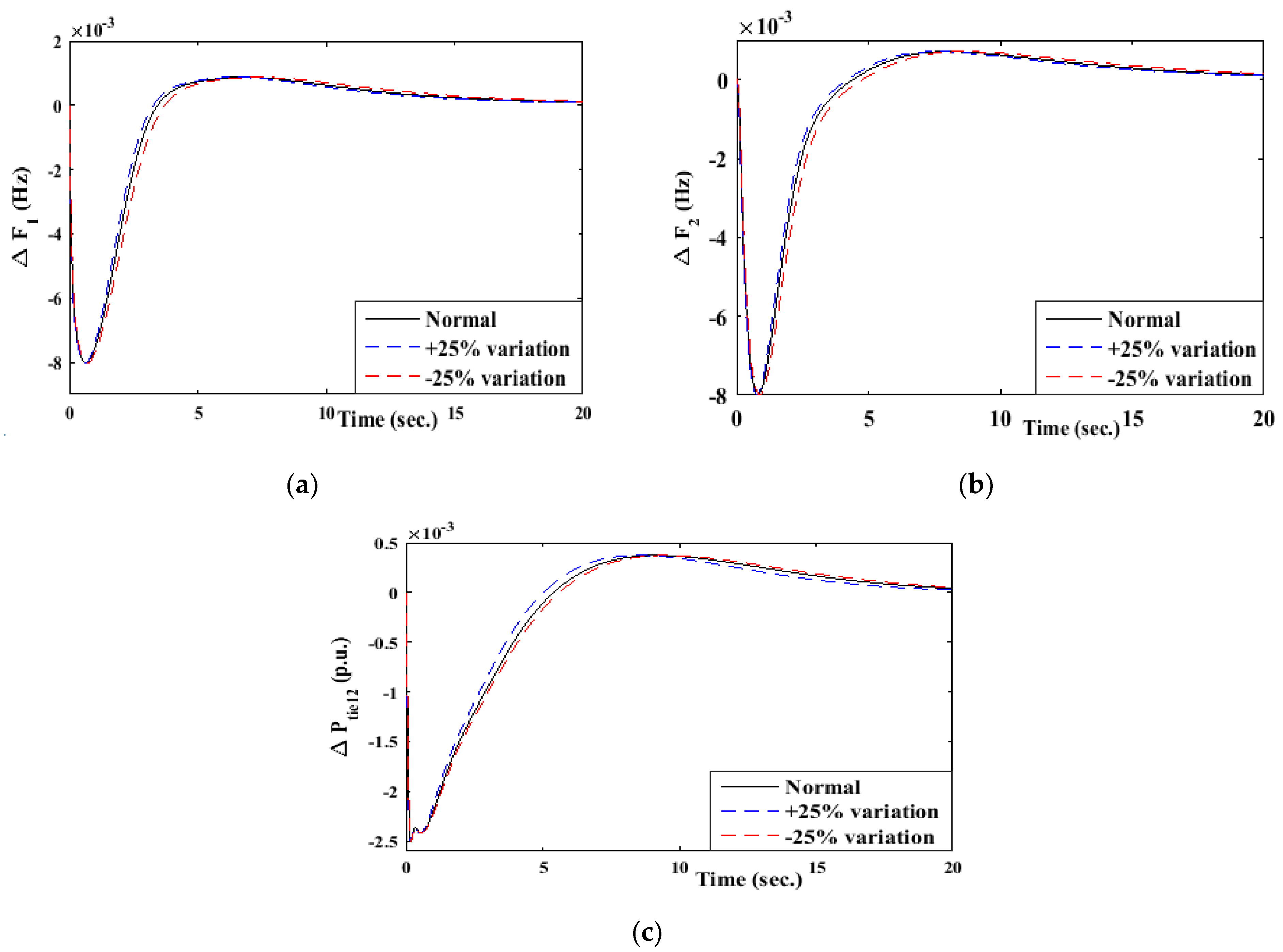
5.4. Sensitivity Analysis of the Internconnected System
6. Conclusions and Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RES | Renewable Energy Sources |
| US | Ultracapacitor |
| SMES | Super Magnetic Energy Storage |
| PV | Photo Voltaic |
| WTG | Wind Turbine Generator |
| LFC | Load Frequency Control |
| FRMS | Frequency Regulation Management System |
| FOPID | Fractional Order Proportional Integral Derivative |
| SLP | Step Load Perturbation |
Appendix A
- Thermal power plant
- Hydro power plant
- Solar PV power plant
- Wind turbine generator
- UC
- SMES
- Battery
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Tasnin, W.; Saikia, L.C. Comparative Performance of Different Energy Storage Devices in AGC of Multi-Source System Including Geothermal Power Plant. J. Renew. Sustain. Energy 2018, 10, 024101. [Google Scholar] [CrossRef]
- Pham, T.N.; Trinh, H.; Oo, A.M.T. Distributed Control of HVDC Links for Primary Frequency Control of Time-Delay Power Systems. IEEE Trans. Power Syst. 2019, 34, 1301–1314. [Google Scholar] [CrossRef]
- Franklin, R.V.R.; Abdul Kareem, P.F. Frequency Regulation in Conventional, Deregulated and Microgrid Systems: A Review on Designs, Strategies, Techniques and Related Aspects. IETE J. Res. 2023, 69, 7476–7494. [Google Scholar] [CrossRef]
- Arya, Y. AGC of Restructured Multi-Area Multi-Source Hydrothermal Power Systems Incorporating Energy Storage Units via Optimal Fractional-Order Fuzzy PID Controller. Neural Comput. Appl. 2019, 31, 851–872. [Google Scholar] [CrossRef]
- Hosseini, S.A.; Toulabi, M.; Ashouri-Zadeh, A.; Ranjbar, A.M. Battery energy storage systems and demand response applied to power system frequency control. Int. J. Electr. Power Energy Syst. 2022, 136, 107680. [Google Scholar] [CrossRef]
- Amir, M.; Zaery, M.; Singh, K.; Hussain, S.S.; Abido, M.A. Enhancement of Frequency Regulation by TFOID Controller in Hybrid Renewable Energy with Battery Storage System Based Multi Area Microgrids. IEEE Access 2024, 12, 110813–110828. [Google Scholar] [CrossRef]
- Moghaddam, H.A.; Saeedinia, M.H.; Mohamadian, S.; Mahdavi, M.S.; Gharehpetian, G.B. Integrated modeling of power network and connected flywheel energy storage system for optimal power and energy ratings of flywheel. IEEE Trans. Energy Convers. 2020, 36, 1589–1599. [Google Scholar] [CrossRef]
- Alghamdi, S.; Alqarni, M.; Hammad, M.R.; AboRas, K.M. First-of-its-kind frequency enhancement methodology based on an optimized combination of FLC and TFOIDFF controllers evaluated on EVs, SMES, and UPFC-integrated smart grid. Fractal Fract. 2023, 7, 807. [Google Scholar] [CrossRef]
- Meseret, G.M.; Saikia, L.C. Design of intelligent-based cascaded controller for AGC in three-area diverse sources power systems-incorporated renewable energy sources with SMES and parallel AC/HVDC tie-lines. Electr. Eng. 2024, 106, 793–814. [Google Scholar] [CrossRef]
- Murali, S.; Shankar, R.; Sharma, P.; Singh, S. Assessment of power system resiliency with new intelligent controller and energy storage systems. Electr. Power Compon. Syst. 2024, 52, 1414–1436. [Google Scholar] [CrossRef]
- Mohamed, A.; Wazeer, E.M.; El Masry, S.M.; Ghany, A.A.; Mosa, M.A. A novel scheme of load frequency control for a multi-microgrids power system utilizing electric vehicles and supercapacitors. J. Energy Storage 2024, 89, 111799. [Google Scholar] [CrossRef]
- Saini, N.; Ohri, J. Optimal and Robust Load Frequency Control for Hybrid Power System Integrated with Energy Storage Device by Sine Cosine Algorithm. Wirel. Pers. Commun. 2024, 138, 1955–1983. [Google Scholar] [CrossRef]
- Huang, C.; Yang, M.; Ge, H.; Deng, S.; Chen, C. DMPC-based load frequency control of multi-area power systems with heterogeneous energy storage system considering SOC consensus. Electr. Power Syst. Res. 2024, 228, 110064. [Google Scholar] [CrossRef]
- Khan, I.A.; Mokhlis, H.; Mansor, N.N.; Illias, H.A.; Awalin, L.J.; Wang, L. New trends and future directions in load frequency control and flexible power system: A comprehensive review. Alex. Eng. J. 2023, 71, 263–308. [Google Scholar] [CrossRef]
- Khokhar, B.; Parmar, K.S. Utilizing diverse mix of energy storage for LFC performance enhancement of a microgrid: A novel MPC approach. Appl. Energy 2023, 333, 120639. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, M.; Shahzad, S.; Muqeet, H.A.; Shahzad, M.; Hussain, M.M. Load frequency control (LFC) strategies in renewable energy-based hybrid power systems: A review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Gupta, D.K.; Jha, A.V.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Load frequency control using hybrid intelligent optimization technique for multi-source power systems. Energies 2021, 14, 1581. [Google Scholar] [CrossRef]
- Pati, S.S.; Subudhi, U. Stability Analysis of a Multi-area Renewable System and Frequency Control with Improved Chaotic Harris Hawk Optimization Algorithm. Arab. J. Sci. Eng. 2024, 49, 6531–6550. [Google Scholar] [CrossRef]
- Mohamed, M.A.E.; Jagatheesan, K.; Anand, B. Modern PID/FOPID controllers for frequency regulation of interconnected power system by considering different cost functions. Sci. Rep. 2023, 13, 14084. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.A.; Hosseinnia, S.H.; Petlenkov, E.; Ates, A.; Cech, M. Towards industrialization of FOPID controllers: A survey on milestones of fractional-order control and pathways for future developments. IEEE Access 2021, 9, 21016–21042. [Google Scholar] [CrossRef]
- Wadi, M.; Shobole, A.; Elmasry, W.; Kucuk, I. Load frequency control in smart grids: A review of recent developments. Renew. Sustain. Energy Rev. 2024, 189, 114013. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.A.; Basit, A.; Aslam, S.; Zhang, G. Modified FOPID controller for frequency regulation of a hybrid interconnected system of conventional and renewable energy sources. Fractal Fract. 2023, 7, 89. [Google Scholar] [CrossRef]
- Çelik, E.; Öztürk, N.; Houssein, E.H. Improved load frequency control of interconnected power systems using energy storage devices and a new cost function. Neural Comput. Appl. 2023, 35, 681–697. [Google Scholar] [CrossRef]
- Shehab, M.; Mashal, I.; Momani, Z.; Shambour, M.K.Y.; AL-Badareen, A.; Al-Dabet, S.; Bataina, N.; Alsoud, A.R.; Abualigah, L. Harris hawks optimization algorithm: Variants and applications. Arch. Comput. Methods Eng. 2022, 29, 5579–5603. [Google Scholar] [CrossRef]
- Jia, D.; Wang, D. A Maximum Power Point Tracking (MPPT) Strategy Based on Harris Hawk Optimization (HHO) Algorithm. Actuators 2024, 13, 431. [Google Scholar] [CrossRef]
- Fakhfour, K.; Pourfayaz, F. Size Optimization of Standalone Wind-Photovoltaic-Diesel-Battery Systems by Harris Hawks Optimization (HHO): Case Study of a Wharf Located in Bushehr, Iran. Int. J. Electr. Power Energy Syst. 2024, 163, 110353. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Optimal Value Considering the Cost Function | ||||
|---|---|---|---|---|---|
| ISE | ITAE | ISTE | ISTSE | iISTSE | |
| PID | 0.0574 | 0.0092 | 0.0752 | 0.0044 | 0.0041 |
| FOPID | 0.0505 | 0.0085 | 0.0675 | 0.0037 | 0.0035 |
| 1+MFOPID | 0.0455 | 0.0074 | 0.0557 | 0.0023 | 0.0017 |
| Area | Controller | Optimal Controller Parameters | ||||
|---|---|---|---|---|---|---|
| Kp | Ki | Kd | α | μ | ||
| 1 | PID | 2.9412 | 2.0810 | 2.1012 | - | - |
| FOPID | 2.2870 | 1.9553 | 2.3510 | 0.55 | 0.67 | |
| 1+MFOPID | 2.2872 | 2.0152 | 2.1123 | 0.49 | 0.68 | |
| 2 | PID | 2.6582 | 2.8810 | 2.1112 | - | - |
| FOPID | 2.1580 | 1.9153 | 2.5510 | 0.75 | 0.72 | |
| 1+MFOPID | 2.2851 | 2.1152 | 2.1025 | 0.79 | 0.78 | |
| 3 | PID | 2.2651 | 2.6527 | 2.5621 | - | - |
| FOPID | 2.3133 | 2.0751 | 2.2552 | 0.64 | 0.68 | |
| 1+MFOPID | 2.6582 | 2.6510 | 2.1357 | 0.82 | 0.72 | |
| Conditions | Eigen Values | Damping Ratio (min.) |
|---|---|---|
| Proposed Controller | −16.0630, −4.7140 ± j5.2284, −14.400 ± j9.4010,−13.1660, −11.4040 ± j8.2014, −11.2010 ± j0.5400, −5.8010 ± j4.2987, −4.2580 ± j8.012−2.5200, −3.6103 ± j1.2284, −2.1205 ± j1.6533, −1.7403 ± j1.5280, −1.3000 ± j4.1170, −1.7510 ± j11.1004, −1.3442 ± j7.0513, −1.2100 ± j9.5587, −1.1705 ± j6.8473, −1.1033 ± j1.0563, −1.13200 ± j3.1170 | 0.392 |
| FOPID Controller | −1.1710 ± j1.1020, −3.0103 ± j3.2474, −10.7100 ± j10.820, −2.0255 ± j1.9863, −4.7113 ± j14.2563, −10.10030, −9.5440 ± j1.2016, −2.0400 ± j3.2578, −2.8510 ± j1.1624, −1.3002 ± j8.9223, −6.1211 ± j11.6587, −1.2110 ± j9.1110, −7.0505 ± j6.4713, −4.8113 ± j1.8243, −5.0550, −4.1140 ± j5.8584, −2.3700 ± j13.0170, −5.1400 ± j1.2777 | 0.285 |
| PID Controller | −0.0000 ± j0.0011, −0.0003 ± j0.3000, −3.3310 ± j0.8010, −2.8141 ± j1.7800, −1.8111 ± j0.7150, −1.9203 ± j5.6013, −0.8870 ± j8.2118, −1.1542 ± j0.4044, −0.1455 ± j0.1021, −0.4720 ± j2.1010, −0.9110 ± j0.2230, −1.3897 ± j1.8821, −0.1656 ± j2.0050, −0.4200 ± j0.0584 | 0.174 |
| Without Controller | −0.1005 + j0.0050, −3.7203 + j0.2400, 1.5700 + j0.8275, 0.8500, 1.1901 ± j0.4270, 0.1200, 0.1009 + j0.0000, −0.0703 ± j0.0713, 0.0880 ± j0.0479,−0.1570 ± j0.0554, 0.0995, −0.1520 ± j0.3001, −0.7180 ± j0.1230, −0.1056 ± j0.2550, −0.3400 ± j0.0284, 0.916 ± j0.0780, −0.9300 ± j0.1584 | 0.122 |
| Controller | ∆F1 | ∆F2 | ∆F3 | |||
|---|---|---|---|---|---|---|
| Over/Under Shoot (10−3) | Settling Time (2%) | Over/Under Shoot (10−3) | Settling Time (2%) | Over/Under Shoot (10−3) | Settling Time (2%) | |
| PID | 13.84 | 17.15 | 14.94 | 16.37 | 24.74 | 17.85 |
| FOPID | 11.25 | 14.45 | 12.17 | 12.84 | 18.54 | 17.24 |
| 1+MFOPID | 7.95 | 12.25 | 7.90 | 7.98 | 13.10 | 15.22 |
| Controller | ∆Ptie12 | ∆Ptie23 | ∆Ptie13 | |||
|---|---|---|---|---|---|---|
| Over/Under Shoot (10−3) | Settling Time (2%) | Over/Under Shoot (10−3) | Settling Time (2%) | Over/Under Shoot (10−3) | Settling Time (2%) | |
| PID | 3.58 | 18.21 | 27.55 | 14.85 | 4.17 | 17.97 |
| FOPID | 1.75 | 17.75 | 26.41 | 14.05 | 3.19 | 21.90 |
| 1+MFOPID | 5.72 | 10.57 | 15.54 | 11.61 | 3.04 | 21.24 |
| Indices | Parameter | SOC Level | ||
|---|---|---|---|---|
| 30% | 50% | 80% | ||
| Over/under shoot (10−3) | ∆F1 | 9.98 | 7.95 | 5.88 |
| ∆F2 | 11.56 | 9.90 | 7.98 | |
| ∆F3 | 15.65 | 13.10 | 11.59 | |
| ∆Ptie12 | 7.85 | 5.72 | 4.50 | |
| ∆Ptie23 | 16.65 | 15.54 | 13.65 | |
| ∆Ptie13 | 3.95 | 3.04 | 2.85 | |
| Settling time (10−3) | ∆F1 | 13.55 | 12.25 | 9.85 |
| ∆F2 | 9.87 | 7.98 | 5.84 | |
| ∆F3 | 18.55 | 15.22 | 11.25 | |
| ∆Ptie12 | 13.40 | 10.57 | 8.86 | |
| ∆Ptie23 | 13.84 | 11.61 | 9.54 | |
| ∆Ptie13 | 25.67 | 21.24 | 19.27 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pati, S.S.; Subudhi, U.; Mishra, S. Robust Frequency Regulation Management System in a Renewable Hybrid Energy Network with Integrated Storage Solutions. Electricity 2025, 6, 22. https://doi.org/10.3390/electricity6020022
Pati SS, Subudhi U, Mishra S. Robust Frequency Regulation Management System in a Renewable Hybrid Energy Network with Integrated Storage Solutions. Electricity. 2025; 6(2):22. https://doi.org/10.3390/electricity6020022
Chicago/Turabian StylePati, Subhranshu Sekhar, Umamani Subudhi, and Sivkumar Mishra. 2025. "Robust Frequency Regulation Management System in a Renewable Hybrid Energy Network with Integrated Storage Solutions" Electricity 6, no. 2: 22. https://doi.org/10.3390/electricity6020022
APA StylePati, S. S., Subudhi, U., & Mishra, S. (2025). Robust Frequency Regulation Management System in a Renewable Hybrid Energy Network with Integrated Storage Solutions. Electricity, 6(2), 22. https://doi.org/10.3390/electricity6020022