1. Introduction
The number and severity of work zone crashes has been steadily increasing over the past decade. About 100,000 work zone crashes occurred between 2013 and 2021, resulting in 42,000 injuries and 924 fatalities (an increase of 61%) [
1] with a 7% decrease in work zone fatalities in 2022 [
2]. In 2022, work zone crashes resulted in 891 fatalities and 37,701 injuries [
2]. A 2022 nationwide study on highway work zone safety by the Associated General Contractors of America (AGC) found that 64% of highway contractors experienced work zone crashes [
3]. According to Federal and State departments of transportation, distracted and aggressive driving were the key factors perpetuating this unfortunate trend [
4]. The FHWA mandated that each highway agency must revise their state safety mobility plan by 2008 to incorporate positive protection measures in work zones [
5]. These measures are designed to mitigate the impact of work zone crashes and enhance safety for both workers and the traveling public. The TMA (Truck-Mounted Attenuator) is an example of a protective device used in work zones that provides positive protection to workers by absorbing the energy from rear-end motor vehicle collisions. Studies [
6] have confirmed that deploying TMAs in work zones helped reduce the risk of injury or death and cost of a crash by 1.8 and 3.5 times, respectively. The number of TMA hits in recent years has, however, increased; for example, in Virginia, TMA crashes have increased by 52.9%, 26.9%, and 36.4 from 2011 to 2012, 2012 to 2013, and 2013 to 2014, respectively [
7]. In Missouri, the number of TMA crashes rose by 20% between 2020 and 2023 [
8]. This has necessitated the need for audible alert systems to provide early warning to distracted drivers who are on collision course with a TMA. These alert systems are manually operated, which presents several challenges—(i) human error: the person responsible for activating the system may forget or become distracted, leading to delays in deploying or no deployment of the alert. (ii) Slower response time: manual systems depend on human reaction, which can be slower under high stress, unlike automated systems that respond instantly. (iii) Operator fatigue: operators may experience fatigue due to the monotonous environment, reducing the effectiveness of the alert system. (iv) High operational cost: manual systems require more personnel, increasing operational costs since someone must always be present to manage the system. (v) Increased risk of injury: If the system is manually operated and a TMA is struck, the operator could be harmed. Automated systems, however, eliminate this risk by removing the need for a human operator in such situations. The goal of the current study is to develop and evaluate an AI-enabled vision system that can be used to automatically trigger an audible alert to drivers on collision course with a TMA.
The minimum requirements of an automated audible TMA alert system should include the following abilities: (1) detect and classify all vehicles surrounding the TMA; (2) track and determine the direction of each vehicle with respect to the TMA; (3) flag vehicle(s) on collision course based on factors such as speed, acceleration, and time to collision; (4) send an appropriate alert to the driver on collision course. Recent advances in deep machine learning have significantly improved the accuracy of vision systems used for vehicle recognition, lane detection, tracking, and other activities needed to improve real-time situational awareness and safety on roadways. Traditionally, these systems are designed to address a single task, such as vehicle detection, lane segmentation, or driving area segmentation. However, an audible TMA alert system requires a vision system that can perform multiple tasks simultaneously: detect vehicles, track their position with respect to the TMA, identify traveling lanes, and flag vehicles on collision course with the TMA. While multiple, single-task models could be integrated to deploy an alert system, the computational cost of running multiple models is prohibitively expensive and impractical for real-time applications.
To address this challenge, the current study implements the framework of a single model that can multi-task on different but related problems needed to automatically operate an audible TMA alert system. Multi-task learning (MTL) has emerged as a pivotal technique in the realm of machine learning, demonstrating significant advancements across various domains. MTL aims to enhance the performance of multiple related tasks by leveraging shared representations and learning jointly, rather than independently. The foundational principle behind MTL is that learning multiple tasks concurrently can lead to improved generalization and efficiency, particularly when the tasks are related and can benefit from shared information. This makes MTL particularly suitable for deployment on edge devices with limited memory and computing capabilities, where running multiple models simultaneously may not be feasible. The current study takes inspiration from Panoptic models, exemplified by such as YOLOP [
9], YOLOP2 [
10], and Hybridnets [
11], which have demonstrated remarkable capabilities in simultaneously performing car detection, lane detection, and driving area segmentation.
YOLOP [
9] was the pioneering model designed to address three tasks (detect cars, segment lanes, and segment driving areas) simultaneously, achieving state-of-the-art (SOTA) performance on embedded devices with end-to-end training. Subsequent models like Hybridnets [
11] addressed specific weaknesses, incorporating techniques such as customized anchors, multi-scale bi-directional feature networks, and hybrid loss functions to enhance performance, while YOLOP2 [
10] uses data augmentation (mosaic and mixup) and new hybrid loss for enhance the model’s generalization. YOLOPX [
12] introduced anchor-free detection and attention mechanisms in lane detection to handle the loss of long-range contextual dependencies, while Ehsinet [
13] utilized recursive gated convolutions to address high-order spatial interaction loss.
Despite these significant advancements, these existing models face limitations when applied as an Automated Truck-Mounted Alert System. They lack the capability to detect the distance of oncoming vehicles—a critical feature for alerting distracted drivers to potential hazards. Additionally, they suffer information loss while passing through the successive layers, leading to degradation of the model’s performance. To address this gap, we propose the following: (1) A more generalized model that incorporates a distance classification module into the model. This module accurately classifies the vehicles into three zones: a safe zone (>120 m), a warning zone (60–120 m), and a danger zone (<60 m). By providing real-time distance classification alerts, this enhancement aims to improve driver awareness and response times, thereby reducing the risk of TMA collisions. (2) Generalized Efficient Layer Aggregation Network (GELAN) as a backbone. GELAN provides more stable and robust performance, using conventional convolution to achieve higher parameter usage than the depth-wise convolution design based on the most advanced technology. It offers advantages of being light, fast, and accurate. (3) An alert triggering module: This module processes the model’s output and activates alarms based on the calculated speed, acceleration, and time to collision of the detected vehicles. This module is activated if the vehicles are within the danger zone or warning zone, ensuring timely warnings. A calibrated camera is used to accurately measure speed, acceleration, and time to collision.
This study contributes to the body of knowledge in the following ways:
Introducing an AI-enabled vision system that leverages MTL to detect and classify vehicles, perform lane and road segmentation, and determine distance categories (safe zone, warning zone, danger zone) in real-time;
Implementing a Generalized Efficient Layer Aggregation Network (GELAN) backbone to enhance model stability, efficiency, and accuracy, addressing the limitations of existing models;
Incorporating an alert triggering module that activates alarms based on speed, acceleration, and time to collision, ensuring timely warnings for vehicles in the danger zone or warning zone;
Additionally, our research marks the first instance of applying MTL techniques to TMA automatic audible alerts.
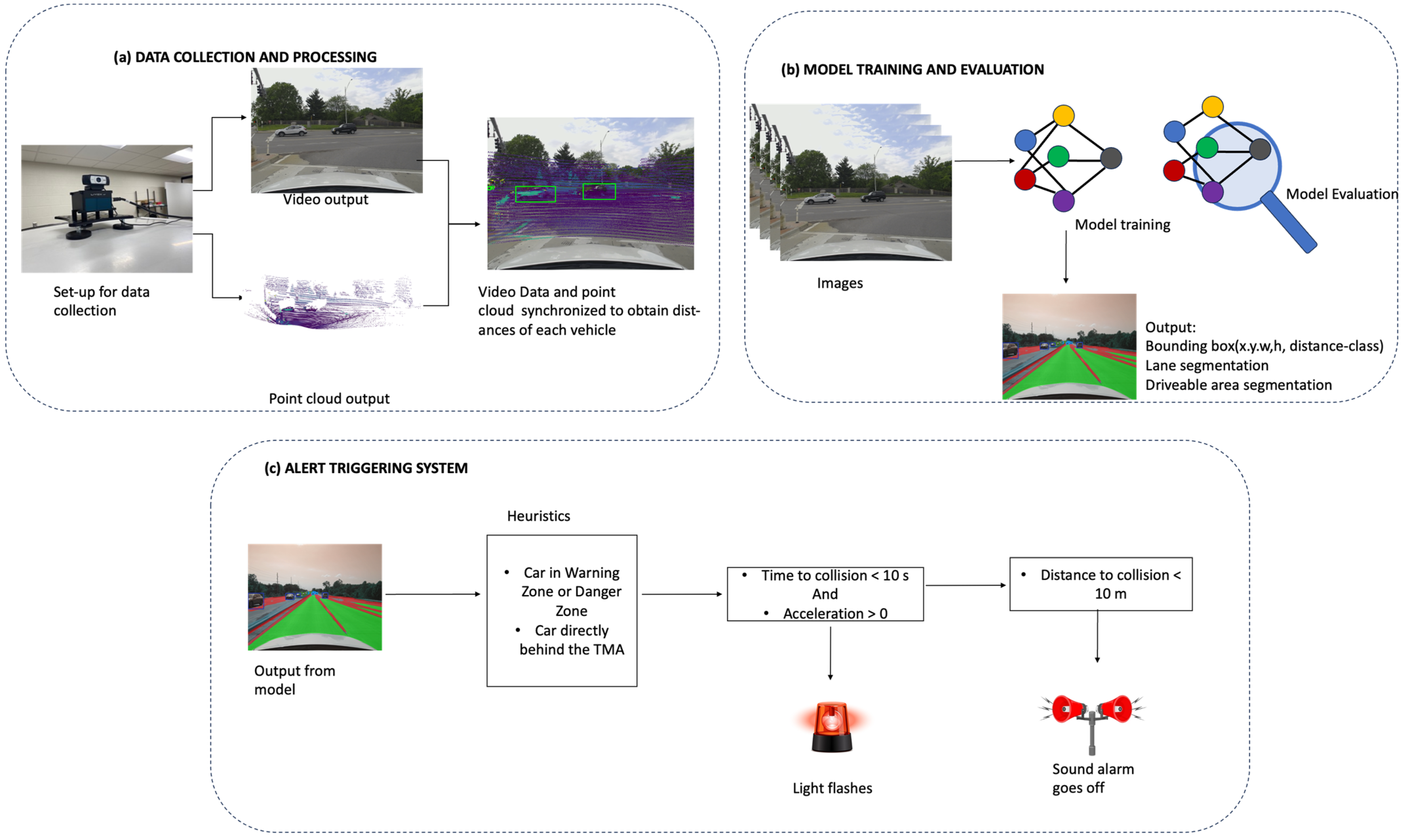
4. Data Collection and Processing
4.1. Sensor Setup and Data Collection
Figure 2 showcases the data acquisition setup, featuring a high-definition 1080p Logitech webcam (Logitech, HongKong, China) mounted above a Livox LiDAR sensor (Livox, Shenzhen, China), both affixed to the top of a vehicle. The Livox LiDAR HAP (T1) employed in this setup boasts a 120° horizontal field of view (FOV) and a 25° vertical field of view. This LiDAR is capable of detecting objects up to a range of 150 m with 10% reflectivity, providing comprehensive 3D spatial information. A Logitech HD 1080 webcam was used for video streaming. This webcam offers a 78° diagonal field of view, capturing high-definition video footage. To prevent any obstruction of the LiDAR’s view, the webcam was strategically mounted on top of the LiDAR sensor. This vertically aligned configuration ensures that both sensors have an unobstructed field of view, enabling them to simultaneously capture complementary data streams.
The Logitech webcam was selected for its sharp 1080p HD resolution, outstanding performance in low-light settings, autofocus capability, and automatic light adjustments. Logitech is a reputable brand in the webcam market, known for delivering durable, high-quality products that are both user-friendly and competitively priced compared to other brands. The Livox HAP was chosen for its ability to endure harsh environments while maintaining reliable performance. It offers a detection range of 150 m, which is ideal for calibrating our model, and generates a dense point cloud with a unique non-repetitive scanning pattern, enhancing point cloud resolution over time. Compared to other premium LiDAR systems, the HAP is also more cost-efficient.
The entire sensor assembly was securely installed on the vehicle, as depicted in
Figure 2. This mobile setup was employed to gather data from a diverse range of environments, such as urban streets and highways. The chosen data collection routes included Providence, Grindstone Parkway, Broadway, and I-70W in Columbia, Missouri, covering both urban and freeway driving conditions. This variety ensures a robust dataset that captures different driving conditions and environments.
The Logitech camera recorded video at a resolution of 640 × 480 pixels, operating at a frame rate of 30 frames per second (FPS). Meanwhile, the Livox LiDAR operated at a frame rate of 10 Hz, capturing spatial data ten times per second.
4.2. Data Processing
In our data processing pipeline, the integration of camera and LiDAR data is critical for accurate analysis and application; however, the differing frame rates and spatial perspectives of these sensors present challenges. To address these, we performed two key steps: data synchronization and data calibration. These steps ensure that the data from both sensors are temporally and spatially aligned, enabling precise and meaningful integration.
4.3. Data Synchronization
The first step in our pipeline was to achieve temporal alignment between the camera images and the LiDAR point clouds. Given that the camera operates at a lower frame rate (FPS) than the LiDAR, it was necessary to synchronize the data from both sensors. We accomplished this by matching each camera image to the LiDAR point cloud with the closest timestamp. This synchronization ensures that the data from both sources correspond to the same moment in time, laying the foundation for accurate subsequent processing.
4.4. Data Calibration
After synchronization, the next step was to achieve spatial alignment between the camera and LiDAR data through a process known as data calibration. To achieve accurate spatial alignment, the point cloud data were calibrated using the natural edges present in the scene utilizing code developed by Yuan et al. [
35]. Natural edges refer to the distinct boundaries or transitions in an image, such as the edges of objects, where there is a significant change in color or intensity. These edges on both LiDAR data and the camera data are detected, allowing them to serve as common reference points for alignment. By identifying and matching these natural edges detected by both the LiDAR and the camera, these two datasets were accurately aligned.
For these edges in both the camera images and the LiDAR point clouds, we established common reference points for alignment. Using these reference points, we computed multiple extrinsic matrices that represent the transformation from the LiDAR frame to the camera frame. These matrices encapsulate the rotation and translation necessary to map points from the LiDAR coordinate system to the camera coordinate system.
Given the inherent noise and potential inaccuracies in individual calibration results, we computed the median of these extrinsic matrices. The median matrix provides a robust estimate of the transformation by mitigating the influence of outliers and ensuring a more reliable mapping between the two coordinate systems.
Once the robust transformation matrix was established, we applied it to the 3D LiDAR points, which include the x, y, and z coordinates. This transformation repositions the LiDAR points into the camera’s coordinate frame. Subsequently, we projected these transformed 3D points onto the 2D image plane using the camera’s intrinsic matrix. The intrinsic matrix accounts for the camera’s focal length, optical center, and other internal parameters essential for accurate projection.
Lens distortion, which can cause significant deviations in the projected points, was corrected using distortion coefficients specific to the camera. These coefficients adjust the projected points to account for barrel or pincushion distortion, ensuring the points accurately reflect the true scene’s geometry. Given the different fields of view (FOV) of the camera and the LiDAR, not all projected points fall within the camera’s image plane. Points that lie outside the image boundaries were discarded as they do not correspond to any valid pixel in the image. This step ensures that only relevant points, which have a corresponding pixel in the image, are retained for further processing.
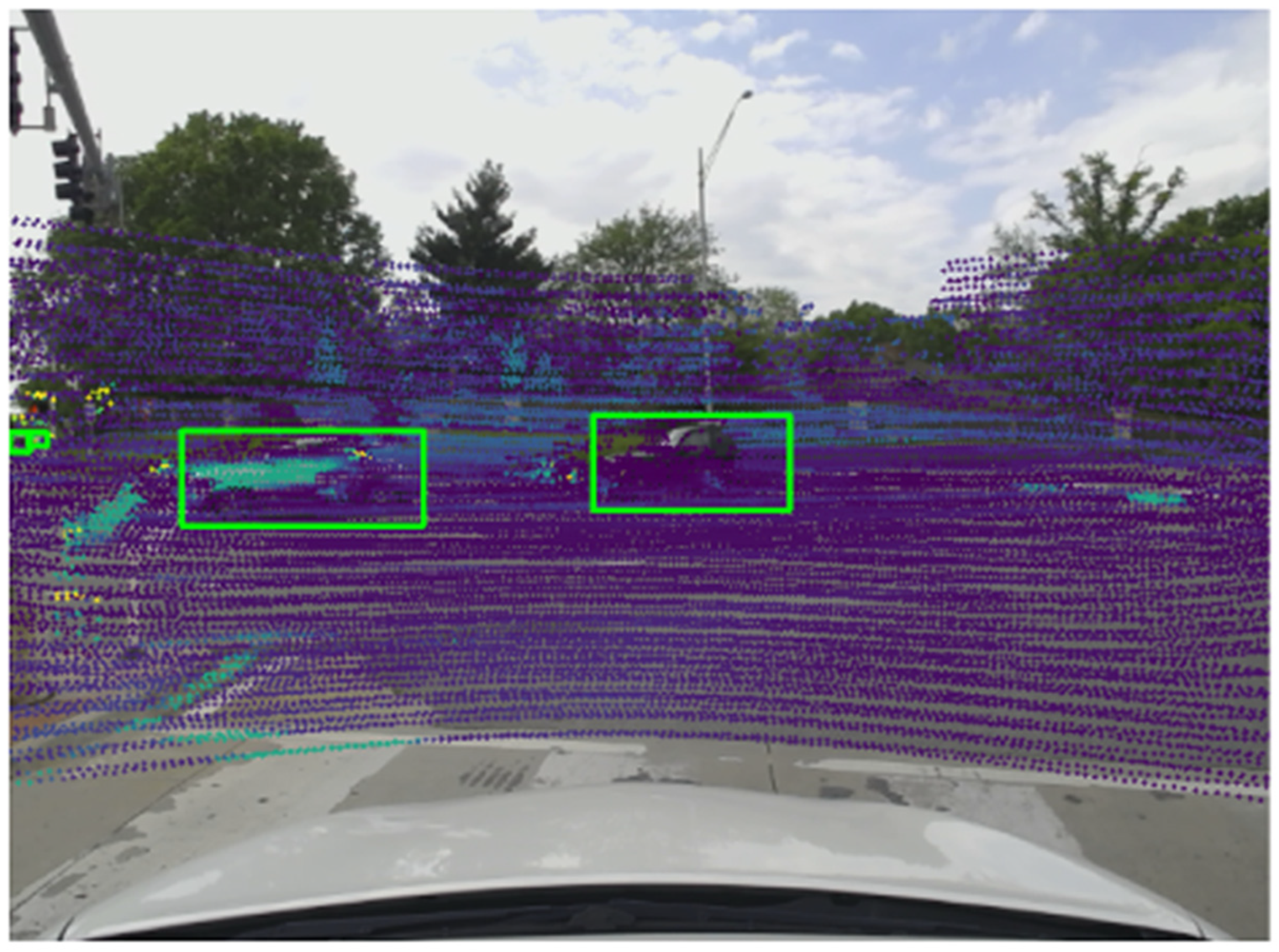
Through these steps, we effectively synchronized and calibrated the LiDAR and camera data, enabling accurate and meaningful integration of the two data sources for subsequent analysis and applications.
Figure 3 shows the point cloud data that has been synchronized and calibrated with the image data.
4.5. Ground Truth
YOLOPX was utilized to generate ground truth data. YOLOPX is an anchor-free, multi-task learning network specifically designed for panoptic driving perception. It excels in detecting traffic objects, segmenting drivable areas, and identifying lanes. YOLOPX was selected for its real-time object detection capabilities, optimized performance on edge devices, and excellent balance between accuracy and speed compared to other models. YOLOPX’s outputs include the bounding box coordinates of the vehicle, lane segmentation, and road segmentation. For distance ground truth creation, the synchronized point cloud data were used. The point cloud distances within each bounding box were obtained, and the 75th percentile of these distances was calculated to determine the car’s distance. This distance was then categorized into three distinct ranges: “danger” (0–60 m), “warning” (60–120 m), and “safe” (greater than 120 m). This categorization helps in assessing the safety levels and potential risks posed by oncoming vehicles. The training dataset comprised 6757 images, while the validation dataset included 1691 images (80:20 ratio). For testing, 3825 images were used, all sourced from a video clip that was not part of the training or validation sets, ensuring the model had not previously encountered them.
5. Model Training and Evaluation
5.1. Model Network
The model comprises a shared encoder along with three distinct decoders, illustrated in
Figure 4. The encoder initially processes images with a feature size HXWX3. This encoder is composed of both a backbone and a neck, which collectively extract features from the input images. Subsequently, the individual decoders execute specialized tasks, including object detection, distance classification, lane detection, and drivable area segmentation.
5.2. Encoder
The primary function of the encoder is to extract features from images. Our selection of the GELAN (Generalized Efficient Layer Aggregation Network) backbone is grounded in its capability to capture intricate patterns and contextual information within images, qualities that are essential for our decoder heads. Moreover, it addresses issues such as gradient vanishing, thereby improving training stability. Additionally, it strikes a balance between accuracy and computational efficiency, as noted in YOLOv9 [
36]. GELAN backbone splits the convolutional layer into two paths and processes each and then merges them back. The dual strategy facilitates efficient gradient flow and feature reuse, which enhances the model’s learning efficiency and inference speed by ensuring depth without the computational penalty associated with the increased complexity. These qualities are vital for the TMA alert system, ensuring that the model can effectively capture information, detect vehicles and lanes, and accurately determine distances. The encoder’s neck serves the purpose of feature aggregation and refinement, consolidating and refining features from different scales across the network. By combining various levels, it enhances the model’s ability to capture both the high-level and low-level features of the image. Various modules have been used in the necks of networks, including SPP (Spatial Pyramid Pooling), FPN (Feature Pyramid Network), and Bi-FPN (Bi-directional Feature Pyramid Network). SPP divides up different feature maps into spatial bins, independently pooling features from these bins, which are then concatenated to form a multi-scale representation (cite). In our network, we have adopted the SPPELAN introduced in YOLOv9, this module incorporates Spatial Pyramid Pooling within the ELAN structure, hence capturing multi-scale contextual information while maintaining computational efficiency.
5.3. Detection Head
The detection head is an anchor-based, multi-scale detection head that employs the Path Aggregation Network (PAN) to process a bottom-up transfer of the features. Features from the bottom-up and top-down pathways are concatenated to enhance the detection capabilities. The multi-scale detection heads predict the following: (1) the bounding box coordinates, specifying the position and dimensions (x, y, width, and height) of detected objects; (2) classifying the objects within these bounding boxes; (3) the probability of the predicted class, providing a confidence score for each classification; (4) lastly, they predict the distance category of a detected car. The distance prediction categorizes the car’s proximity into three distinct ranges. These are “danger”, which corresponds to a distance of 0–60 m; “warning”, for a range of 60–120 m; and “safe”, for distances greater than 120 m. This categorization helps in assessing the safety levels and potential risks posed by oncoming vehicles to the TMA. If a vehicle falls within a risky distance range, an alert triggering system is activated to alert the motorist during the risk of the TMA being hit.
5.4. Lane Detection and the Drivable Area Segmentation Decoder
Lane detection and drivable area segmentation differ in their attributes: lane detection segments small linear lines, while drivable area segmentation segments larger areas. Unlike in YOLOP, Hybridnets, and Ehisnet, where features for both decoders (the lane and drivable area) stem from the same feature head, we extract features for these decoders from distinct layers to prevent mutual interference. Drawing inspiration from YOLOPX [
12], we utilize lower features of P4 for the drivable areas as shown in
Figure 4c, which we then restore to the H × W size through four up-samplings.
The lane detection head (
Figure 4d), also influenced by YOLOPX, acquires high-level features C2 and integrates them with an up-sampled P3 that contains multi-scale information. Subsequently, these features are restored to the H × W size using three up-samplings. A Polarized Self-Attention mechanism is employed to separate the direction and magnitude of the features, establishing long-distance contextual dependencies. Overall, our approach optimizes both accuracy and efficiency in lane detection and drivable area segmentation tasks.
5.5. Loss
Our model has multiple heads, therefore, we employ a multi-task loss. The overall loss of the model is given by the following:
where
det is the detection head loss;
daseg is the drivable area segmentation loss;
llseg is the lane detection loss;
are tuning parameters to balance the total loss; and
is 1,
is 0.2, and
is 0.2—these are the same values used in YOLOP.
The detection head loss is given by the formula below:
where
cls is a classification loss;
dist is the distance classification loss;
obj is the object loss; and
cls,
dist,
obj are all Binary Cross Entropy losses, which is a binary variant of the cross entropy loss—this loss is suitable because each object class is treated independently;
box is the box loss, in which the Complete Intersection Over Union addresses localization and the size of the predicted bounding box;
is tuned to 0.5,
is tuned to 1,
is tuned to 0.05 and
is tuned 1.
For the drivable area, cross entropy loss was used to minimize the pixel level classification error.
For the lane detection, we employed a combination of cross entropy loss and IoU loss.
where
TP = true positives;
FP = false positives;
FN = false negatives;
is the true label (0 or 1); and
is the predicted probability of the class.
5.6. Training
The TMA model was trained on an Nvidia RTX GeForce 3090 (Nvidia, Santa Clara, CA, USA)for 30 epochs, starting from pretrained YOLOPX weights. The initial learning rate was set to 0.001, with a minibatch size of 16. A 3-epoch warm-up period was implemented, and the learning rate was adjusted using cosine annealing. The AdamW optimizer was utilized for training.
5.7. Alarm Triggering System
Figure 5 and Algorithm 1 outline the steps involved in the real-time operation of the alert triggering system. The system receives a video livestream as input, which the model processes through three decoder heads: drivable area, lane detection, and object detection with distance classification. The output includes lane segmentation, drivable area segmentation, vehicle detection, and distance classification, categorizing vehicles into danger zone, warning zone, or safe zone. The livestream is captured by a calibrated camera, which accurately determines vehicle distances. The alert system uses a “follower box” to track vehicles within two critical zones in the same lane as the TMA: the danger zone (0–60 m) and the warning zone (60–120 m). With the known distances, the system calculates vehicle speeds and time to collision. If a vehicle moves too close to the TMA, visual and auditory alarms are triggered to warn drivers, thereby enhancing the safety of road maintenance crews. The following sections provide more details on this process.
| Algorithm 1. Alarm Triggering System |
| 1:let D ← [] |
| 2: let S ← [] |
| 3: let A ← [] |
| 4: for framei in livestream: |
| 5: detected_vehicles, distance_category, drive_area, lane_segment ← TMA.Model(framei) |
| 6: if distance_category = “Safe Zone”: |
| 7: None |
| 8: elif distance_category = “Danger Zone” or “Warning Zone”: |
| 9: ld = Calculate distance between two consecutive lane_segmentation |
| 10: selected_lane = max(ld) |
| 11: followerBox ← Draw a follower box in-between selected lane |
| 12: for each corner (bottom-right, top-right, bottom-left, top-left) of followerBox: |
| 13: xsp, ysp = Calculate intersection with nearest lane line from the selected lane |
| 14: lane_line_equation ← Derive lane line equation for left and right lanes |
| 15: if detected_vehicle lies within lane_line_equation: |
| 16: vehicle_following_TMA ← True |
| 17: else: |
| 18: vehicle_following_TMA ← False |
| 19: if vehicle_following_TMA = true: |
| 20: distance_from_TMA ← calibrated_camera(detected_vehicles) |
| 21: D ← append(distance_from_TMA) |
| 22: speed = |
| 23: S ← append(speed) |
| 24: acceleration = |
| 25: A ← append(acceleration |
| 26: if len(D) = 100: |
| 27: time_to_collison = |
| 28: if A [100] > 0 and time_to_collision < 8.5: |
| 29: light_alarm = True |
| 30: else: |
| 31: light_alarm = None |
| 32: if D [100] < 10: |
| 33: sound_alarm = True |
| 34: else: |
| 35: sound_alarm = False |
| 36: let D ← [ ], A ← [ ], S ← [ ] |
| 37: else: |
| None |
| 38: return light_alarm, sound_alarm |
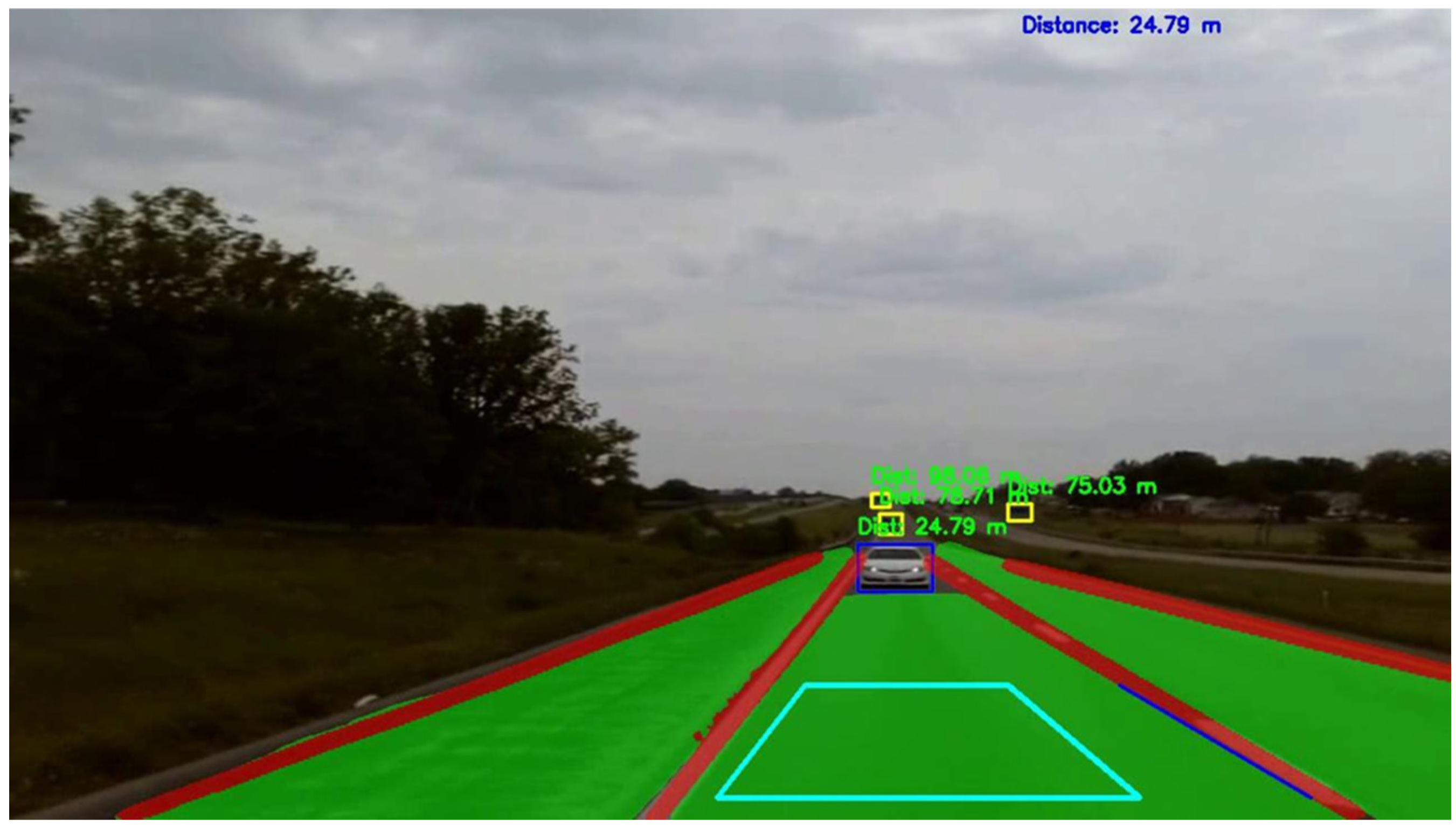
5.8. Determining Vehicles behind the TMA (“Follower Box”)
To trigger the alarm in our alert system, the heuristics code monitors vehicles within the danger zone (0–60 m) and warning zone (60–120 m) that follow behind the TMA in the same lane, disregarding vehicles in other lanes. This is accomplished using a “follower box” to identify the relevant lane. The process of drawing the follower box is semi-automated. The Python code calculates the distances between continuous lane markings and selects those with the largest distance between them as these are usually behind the TMA when the camera is positioned at its rear; however, this method may occasionally be inaccurate, requiring manual adjustment by dragging the follower box to the correct lane markings behind the TMA. The box is then aligned within the lane where the TMA is moving. This setup allows the alarm system to focus on cars in the same lane as the TMA, as illustrated in
Figure 6.
To identify vehicles moving in the same lane as the TMA, the code first determines the lane lines surrounding the TMA’s lane using the follower box. The process begins by identifying the bottom-right corner of the box and calculating the horizontal intersection with the nearest lane line, recording this point. A similar calculation is performed from the top-right corner to obtain a second point on the right lane line. This procedure is repeated for the bottom-left and top-left corners of the box to identify points on the left lane line. Using these points, the system derives the equations for the right and left lane lines. These equations are useful when the detected lane lines do not extend far enough to the car. By extending the lane lines using the derived equations, the system can determine if the car’s bottom center lies between these lines, as shown in the image above.
To confirm if a car is within the lane lines, the system checks if its bottom center falls between the right and left lane lines. It calculates the horizontal intersection of the car’s bottom center with the right lane line and records this position. The same calculation is performed for the left lane line. If the car’s bottom center lies between these two positions, and the car is within the danger zone and warning zone, it is marked as following the TMA. This scenario is depicted in
Figure 7.
5.9. Camera Calibration and LiDAR Correction
Once a vehicle is detected, it is tracked, and the distance from the TMA is calculated using a calibrated camera. This distance is used to determine parameters such as speed, acceleration, and time to collision. The camera is calibrated using chessboard images captured from various angles, processed with OpenCV’s camera calibration code to generate the camera calibration matrix. However, since this calibration does not yield accurate distances, LiDAR is employed to obtain true distance values. These true distances are then used to correct the camera calibration results.
5.10. Speed, Acceleration, and Time to Collision
Distances are recorded and maintained in a window of the past 100 values, with the current distance being the average of these values. Speed is calculated by taking the difference between the first and last distances in this window and dividing by the time difference. Similarly, a window of the past 100 speed values is maintained to calculate acceleration by taking the difference between the first and last speed values and dividing by the time difference. Time to collision is determined by dividing the distance by the speed at each point.
5.11. Alarm Triggering
The system features two alarms: a light alarm and a sound alarm. The light alarm alerts drivers approaching the TMA with acceleration, triggered when the time to collision is less than 8.5 s and acceleration is greater than zero. If the driver does not heed the light alarm and comes dangerously close to the TMA, the sound alarm is triggered when the vehicle is within 10 m of the TMA to alert the driver.
6. Results and Discussion
6.1. Overall Model Performance
The TMA model demonstrates exceptional performance across various tasks crucial for enhancing work zone safety. The model achieved a recall of 90.5%, a mean Average Precision (mAP) of 0.792 for vehicle detection, a mean Intersection over Union (mIOU) of 0.948 for road segmentation, an accuracy of 81.5% for lane segmentation, an IOU of 0.711 for lane segmentation, and an accuracy of 83.8% for distance classification, as shown in
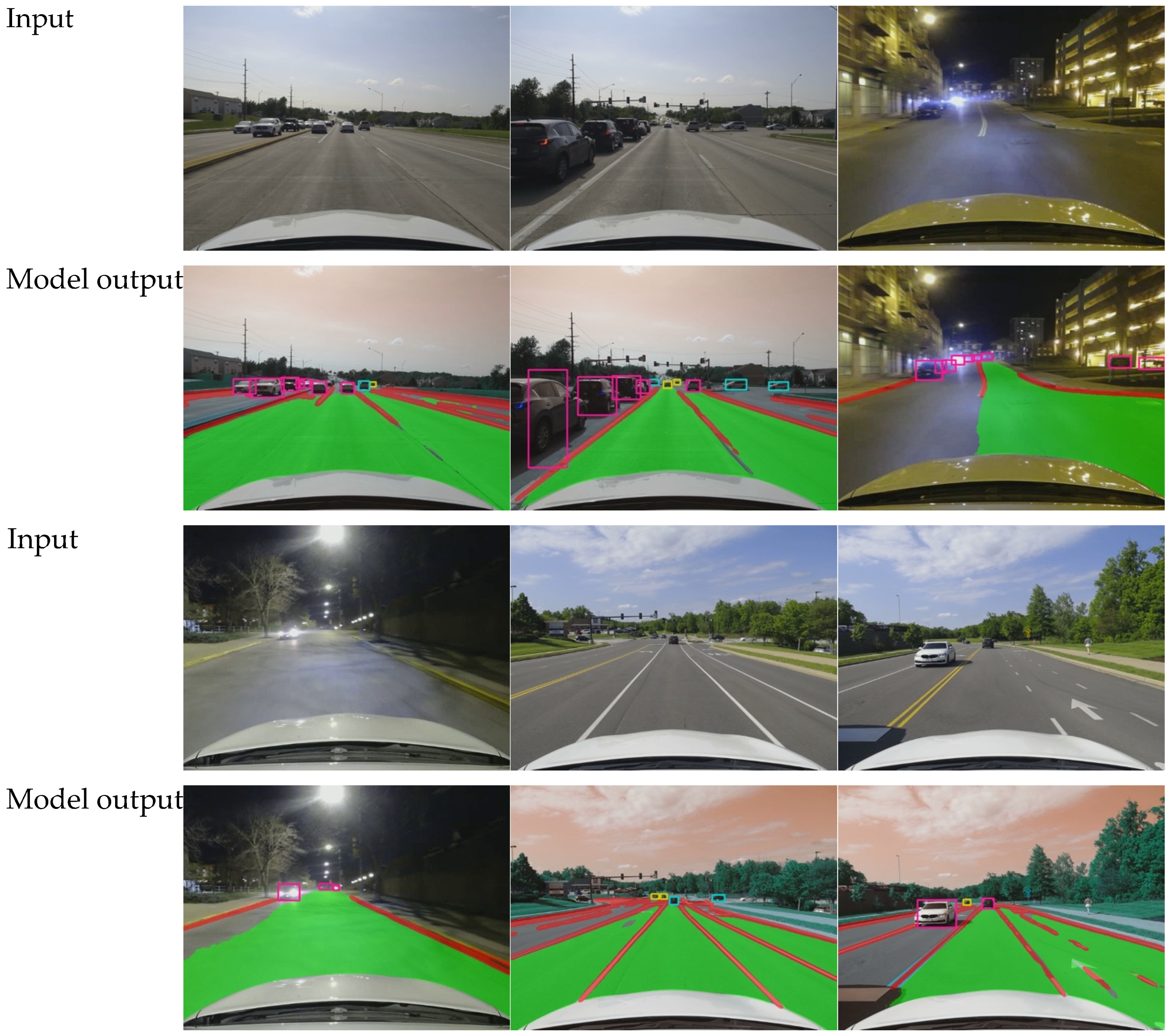
Table 1. These results underscore the model’s robust capability in detecting vehicles, accurately determining their distances, and providing real-time alerts.
Figure 8 showcases the output of the TMA model, highlighting its ability to detect vehicles, classify distances, and segment lanes and roads. In the images, the danger zone is represented in pink, the warning zone in cyan, and the safe zone in yellow, clearly demonstrating the model’s proficiency in distance assessment.
6.2. Distance Detection Accuracy
The model’s accuracy in detecting the distance of oncoming vehicles was evaluated across three distance ranges and the accuracy as shown in
Table 2 are as follows:
0–60 m: the model achieved an accuracy of 0.94;
60–120 m: the accuracy dropped to 0.58;
Over 120 m: the model had an accuracy of 0.73.
These results indicate that the model is highly accurate at shorter distances but faces challenges as the distance increases.
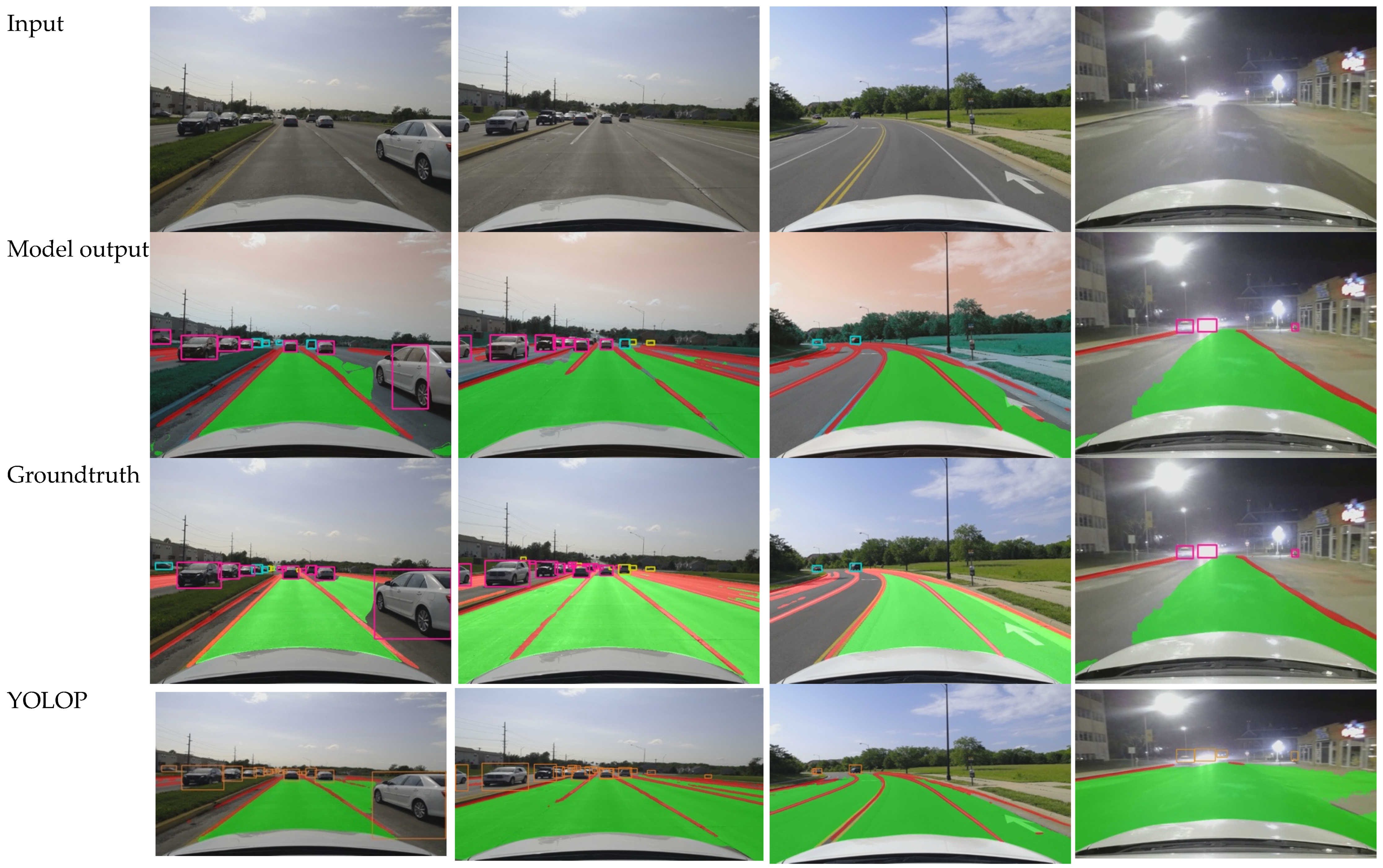
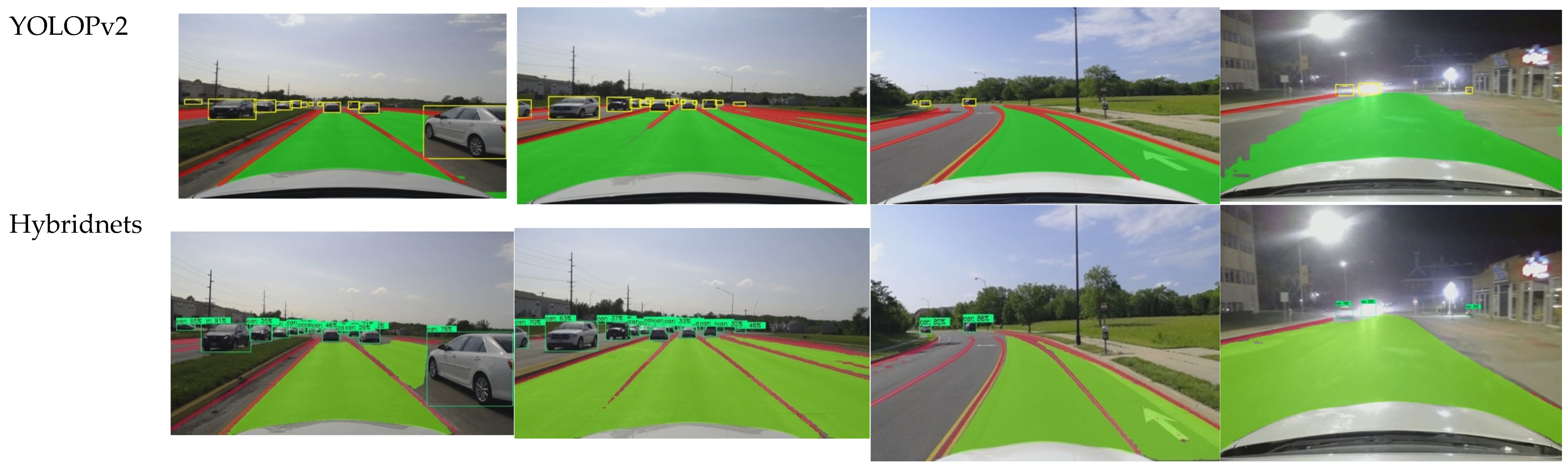
6.3. Comparison with Existing Models
The performance of the TMA model was benchmarked against several existing models, including YOLOP, YOLOPv2, Hybridnets, and Ehisnet, focusing on key tasks such as object detection, lane detection, drivable area segmentation, and key metrics like recall, mean Average Precision at 50% Intersection over Union (mAP50), pixel accuracy, Intersection over Union (IOU), and mean Intersection over Union (mIOU).
Figure 9 illustrates that the TMA model excels across these tasks, particularly in detecting vehicles, classifying distances, and segmenting lanes and roads, consistently maintaining high accuracy across all parameters.
Our choice of the GELAN backbone is a key factor in the model’s performance. The GELAN backbone efficiently captures intricate patterns and contextual information within images—critical for the success of the multi-task learning employed in the TMA model. This network architecture solves issues such as gradient vanishing, improving training stability, and allows for better feature extraction, particularly useful for tasks like lane detection and road segmentation, where capturing fine details is essential. Unlike simpler backbones used in the other models, GELAN utilizes a dual-path strategy, splitting convolutional layers into two paths and merging them, which facilitates better gradient flow and feature reuse. This strategy enhances learning efficiency and improves inference speed without the computational penalties typically associated with increased model complexity. Such an approach ensures that the TMA model achieves a better balance between accuracy and computational efficiency, surpassing models like YOLOP and Hybridnets in performance while maintaining speed, which is critical for real-time applications
6.4. Object Detection
Table 3 highlights that the TMA model achieves a recall of 0.905 and an mAP50 of 0.792, which is competitive with existing models. While Ehisnet outperforms in recall with 0.923, the TMA model maintains a strong balance between recall and mAP50, showcasing its reliability in object detection tasks. Notably, incorporating distance classification into the model does not significantly impact its performance, indicating the model’s robustness and efficiency. This can be attributed to the GELAN backbone’s ability to capture more detailed features, making it better suited for distinguishing vehicles in work zones.
6.5. Lane Detection
Table 4 shows the TMA model’s superiority in lane detection, with a pixel accuracy of 0.815 and an IOU of 0.711. It outperforms YOLOP, Hybridnets, and Ehisnet, demonstrating its capability to accurately segment lanes. The TMA model uses its enhanced feature extraction and segmentation capabilities to achieve higher accuracy and mIOU in challenging conditions, such as work zones with inconsistent lane boundaries.
6.6. Drivable Area Segmentation
Table 5 highlights the TMA model’s excellent performance in drivable-area detection, with an mIOU of 0.948, surpassing YOLOP, Hybridnets, and Ehisnet.
6.7. Inference Speed
Table 6 highlights a comparison of the size and speed (FPS) of the TMA model against existing models. The TMA model strikes an optimal balance with a model size of 22.27 M and a processing speed of 58.2 FPS on an Nvidia RTX GeForce 4080, outperforming other models in speed while maintaining a competitive model size. For example, YOLOPx, while larger at 32.9 M, achieves a slower processing speed of 50.7 FPS, and Hybridnets, though smaller in size at 12.8 M, processes at only 32 FPS.
However, deploying the TMA model on edge devices such as the Nvidia Jetson reveals more about its real-world performance under resource-constrained conditions. On the Nvidia Jetson, the inference speed drops to 12 FPS, which, although slower than high-end GPUs, remains efficient for work zone safety applications. Given the Jetson’s limited computational power compared to desktop GPUs, achieving 12 FPS demonstrates the model’s robustness and adaptability to lower-resource environments while still providing adequate performance for safety-critical tasks.
The comprehensive evaluation and comparison demonstrate that the TMA model excels in key performance metrics, including object detection, lane detection, and drivable area detection, while also achieving a high processing speed and efficient model size. These advancements highlight the TMA model’s potential to significantly enhance real-time work zone safety applications.
6.8. Limitations
Real-world deployment of the proposed AI-enabled vision system could face several challenges that impact its performance, especially when applied to diverse environments beyond the controlled conditions of the original training dataset. Since the model was trained primarily on U.S. roads, it may struggle to accurately detect and classify vehicles or road features in other countries with different traffic rules, road designs, or vehicle types. For example, regions with very hilly or mountainous terrains, sharp curves, or narrow roads may present difficulties, as these conditions were not fully represented in the dataset. Differences in vehicle types and sizes, such as motorcycles, tuk-tuks, or large trucks that are more common in other regions, could pose further detection and classification challenges, as the model may be biased toward vehicles common in the U.S. To ensure reliability and scalability across diverse geographies, future research should focus on training the model on more comprehensive and diverse datasets, including a variety of road types and vehicle types from different countries. Incorporating driving data from various regions would improve the robustness of the system. Another important measure would be deploying adaptive algorithms that allow the system to dynamically learn and adjust to new environments in real-time.
6.9. Broader Impact and Application
The AI-enabled vision system using multi-task learning (MTL) developed in this study offers significant potential for improving road safety and autonomous driving beyond its application to Truck-Mounted Attenuators (TMAs). By efficiently detecting vehicles, classifying distances into danger zones, and performing lane and road segmentation, this system can enhance Advanced Driver Assistance Systems (ADAS), providing real-time alerts for collision avoidance and lane-keeping in passenger vehicles. Secondly, the AI-enabled vision system could be applied to smart crosswalks where it would detect oncoming vehicles and estimate their speed and distance. The system could automatically trigger warning lights or alerts for both drivers and pedestrians when a potential collision is detected. This could be particularly useful in school zones, busy city intersections, or areas with heavy foot traffic. Similar technology could be applied to bicycle lanes, where the system would detect vehicles encroaching into bike lanes or moving dangerously close to cyclists. It could trigger visual and audio alerts for both cyclists and drivers to avoid potential accidents, contributing to safer shared roads. The system could be integrated into V2X communication platforms, allowing vehicles to share real-time safety information with nearby vehicles and infrastructure. For instance, when a vehicle equipped with this system detects an imminent collision or road hazard, it could broadcast alerts to surrounding vehicles or traffic management systems, improving overall situational awareness on the road and thus improving overall road safety and traffic management.
7. Conclusions
This study presents the development and evaluation of an AI-enabled vision system designed to enhance work zone safety by automatically triggering alerts for drivers on a collision course with Truck-Mounted Attenuators (TMAs). The methodology encompassed three key components: data collection and processing, model training and evaluation, and an alert triggering system.
The data collection process utilized synchronized video and point cloud data from a high-definition webcam and Livox LiDAR sensor mounted on a vehicle, ensuring comprehensive coverage of various driving environments. The model, based on the Generalized Efficient Layer Aggregation Network (GELAN) backbone, was trained to perform multiple tasks including object detection, lane segmentation, road segmentation, and distance classification. The training was conducted using an Nvidia RTX GeForce 3090—starting from pretrained YOLOPX weights—and utilized advanced techniques such as cosine annealing and the AdamW optimizer.
The TMA model demonstrated outstanding performance across all tasks, achieving a recall of 90.5%, an mAP of 0.792 for vehicle detection, an mIOU of 0.948 for road segmentation, an accuracy of 81.5% for lane segmentation, and an accuracy of 83.8% for distance classification. The model maintained high accuracy in distance detection, particularly at shorter ranges, and was able to provide real-time alerts effectively.
Comparative analysis with existing models such as YOLOP, Hybridnets, and Ehisnet highlighted the TMA model’s superior performance in key metrics, including object detection, lane detection, and drivable area segmentation, while also achieving faster processing speeds and maintaining an efficient model size. The incorporation of a distance classification module did not significantly affect the overall model performance, showcasing the model’s robustness and efficiency.
The comprehensive evaluation demonstrates that the TMA model is a significant advancement over existing models, offering enhanced accuracy, reliability, and real-time processing capabilities. These enhancements highlight the TMA alert system’s potential to greatly enhance work zone safety by providing timely and precise alerts to prevent collisions and reduce associated costs, such as human injuries, fatalities, vehicle damage, and traffic disruptions. This study contributes to the field by presenting a novel application of multi-task learning (MTL) techniques for TMA automatic audible alerts, setting a new benchmark for work zone safety technologies.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}