
A Multi-Stage Enhancement Based on the Attenuation Characteristics of X-Band Marine Radar Images for Oil Spill Extraction


 , , and
, , and
Abstract
1. Introduction
2. Study Area and Data Sets
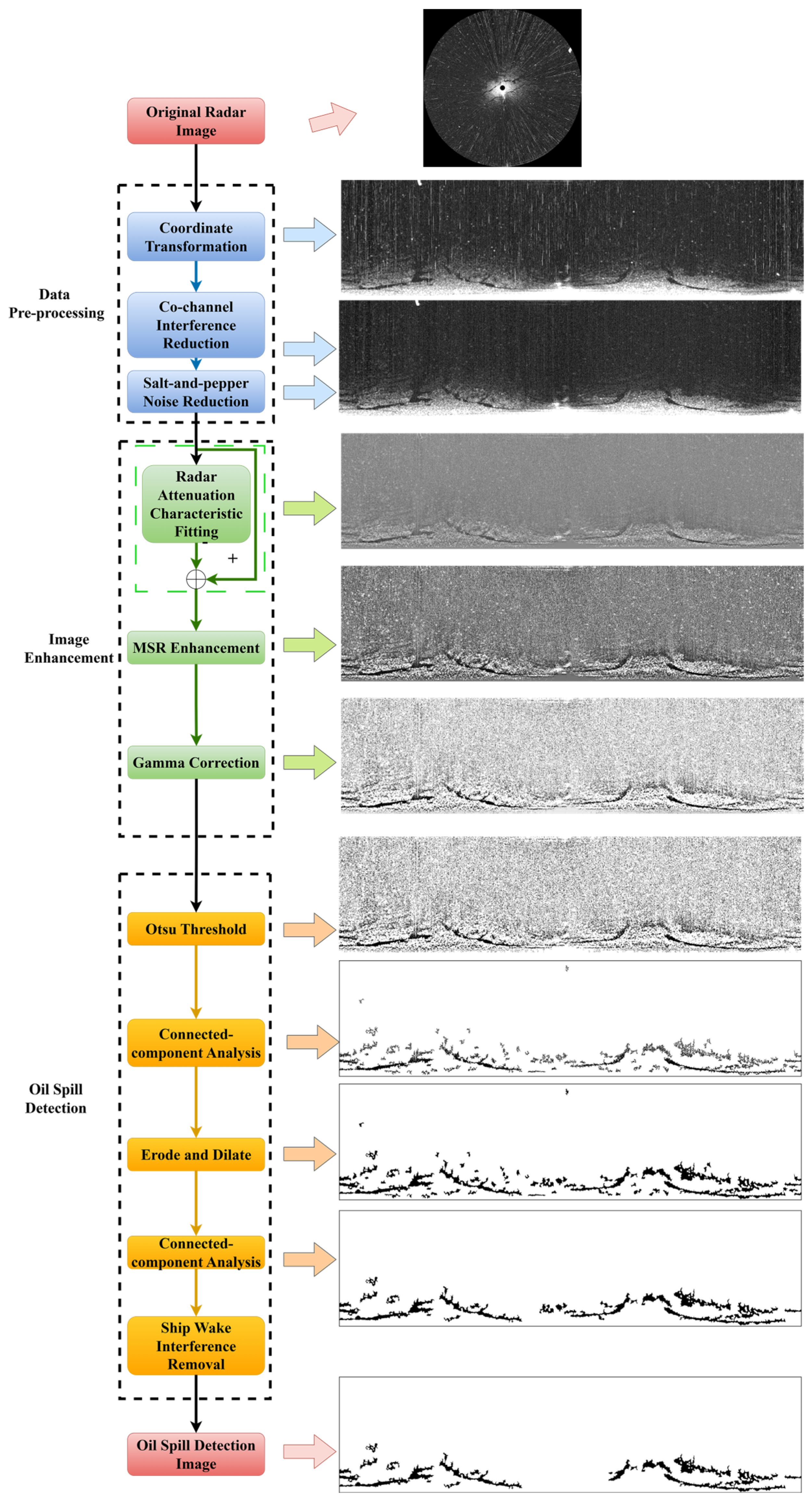
3. Methodology
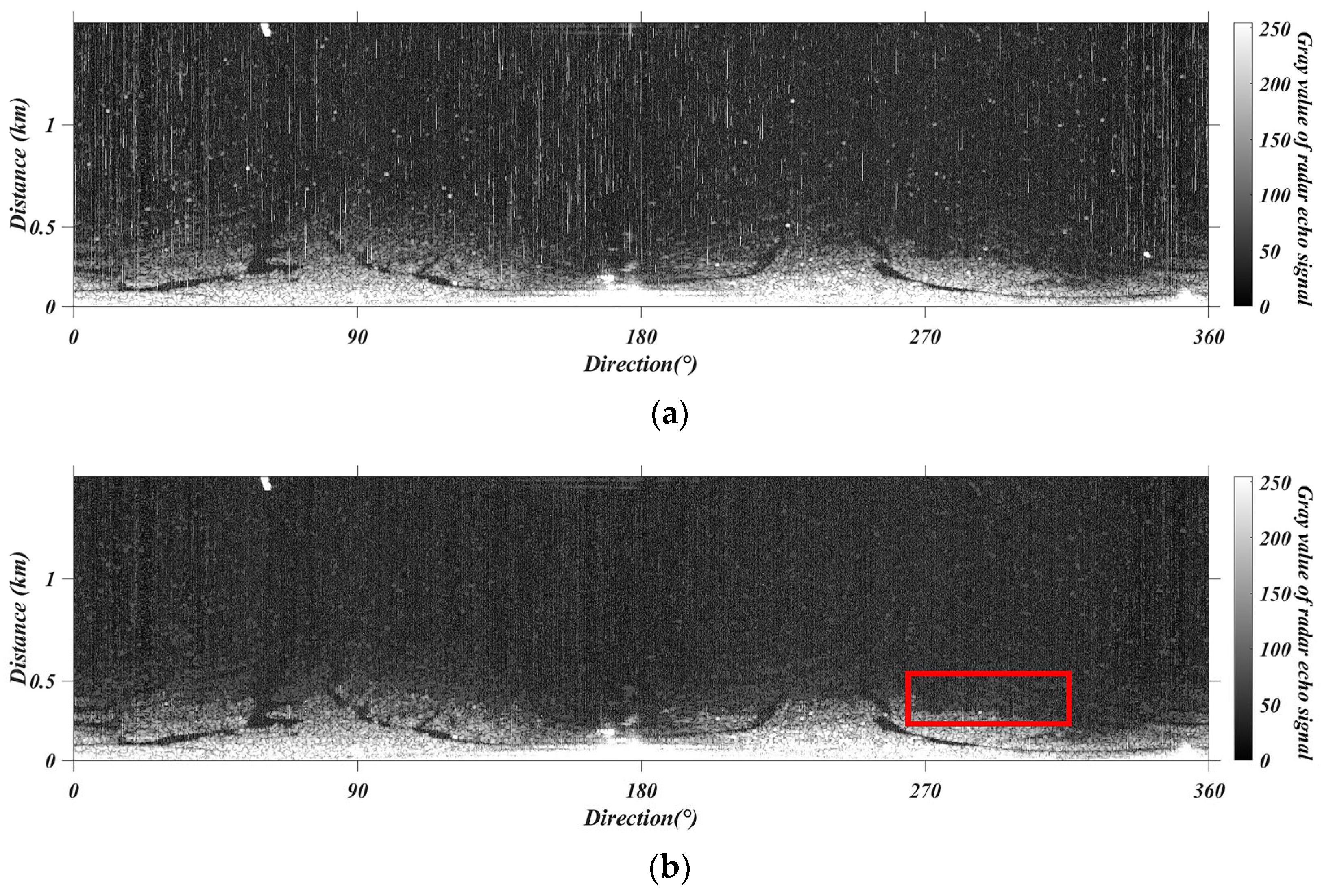
3.1. Data Pre-Processing
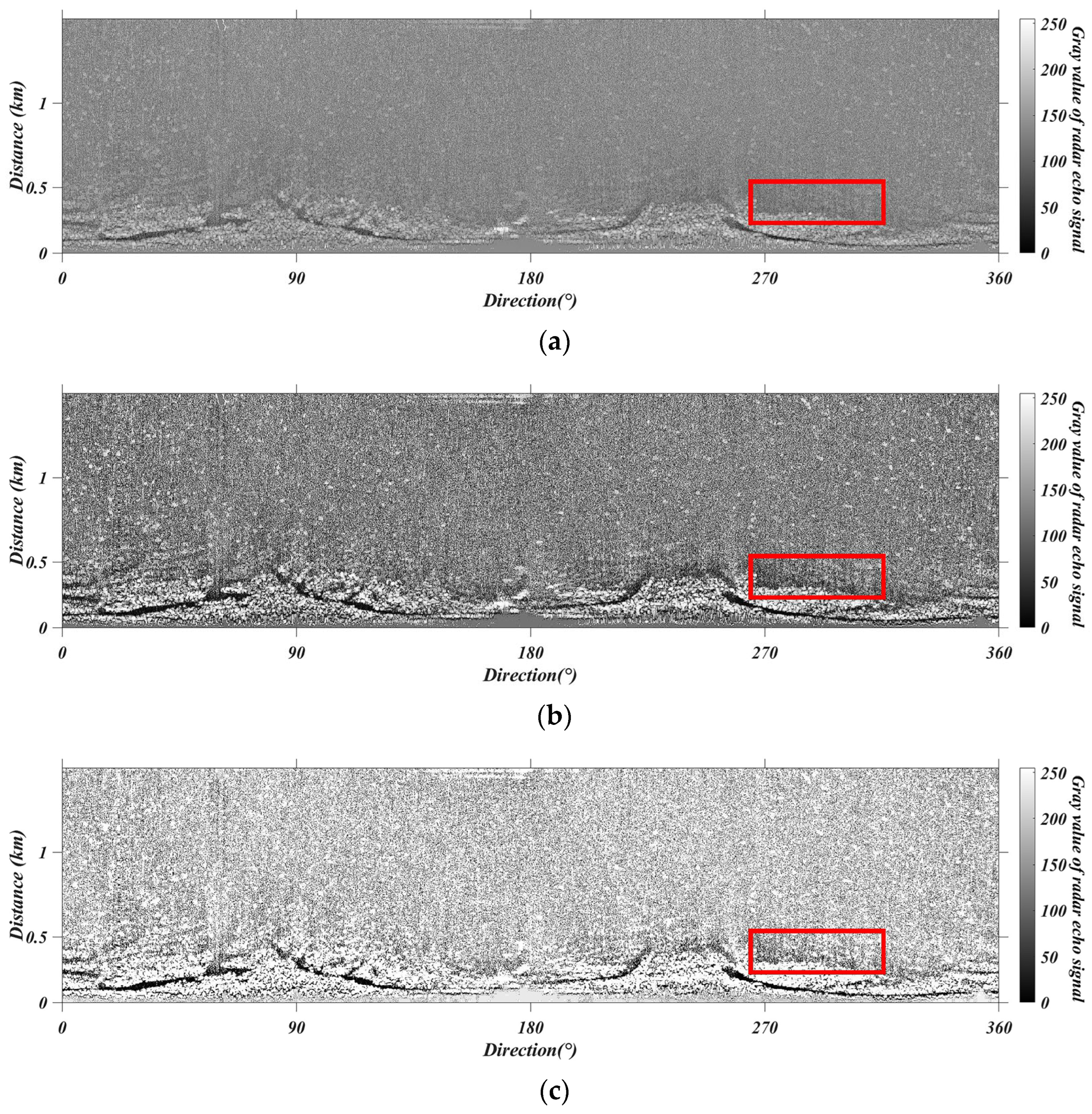
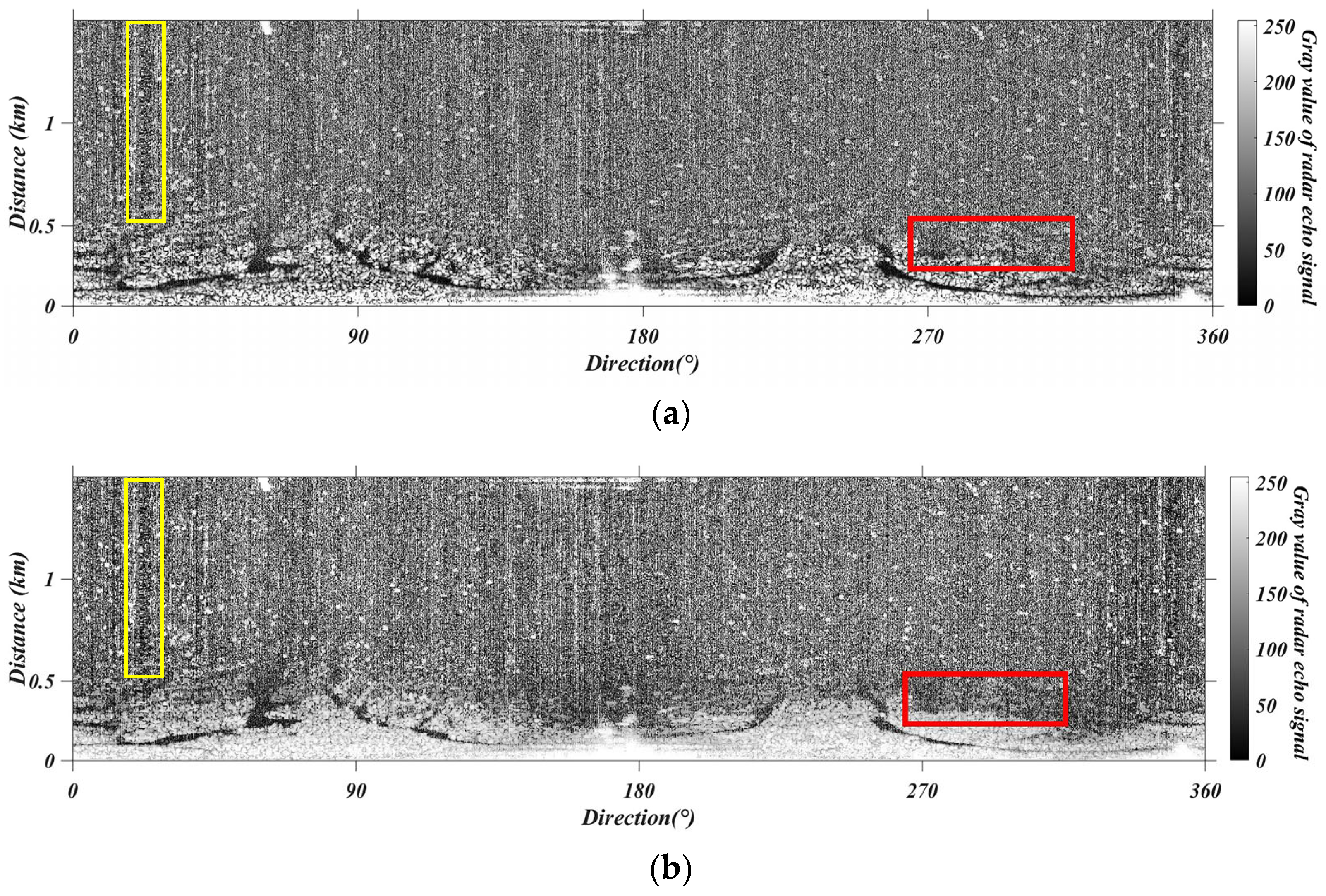
3.2. Image Enhancement
3.3. Oil Spill Detection
4. Experiment and Discussion
4.1. Data Processing
4.2. Enhancement Analysis
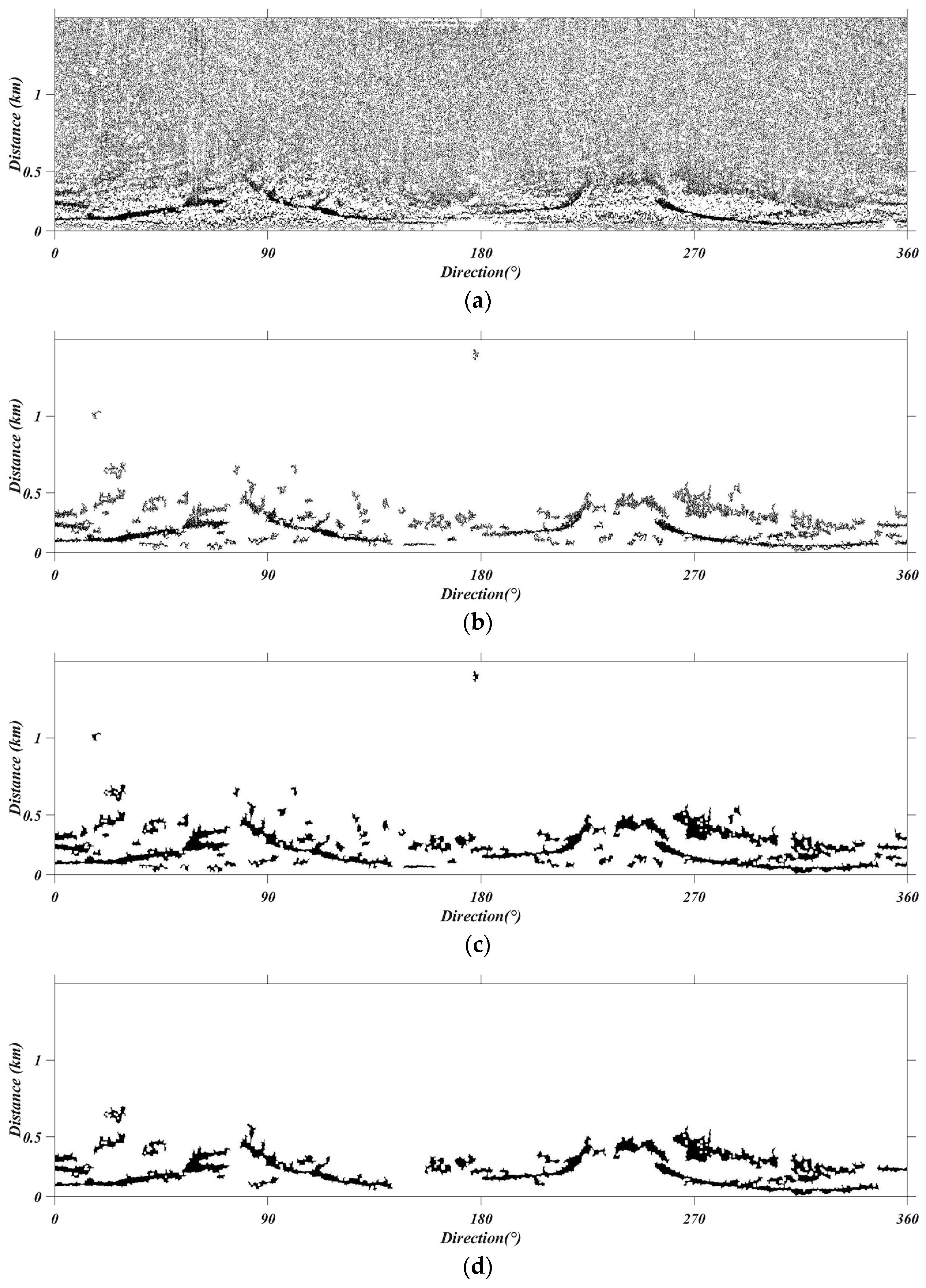
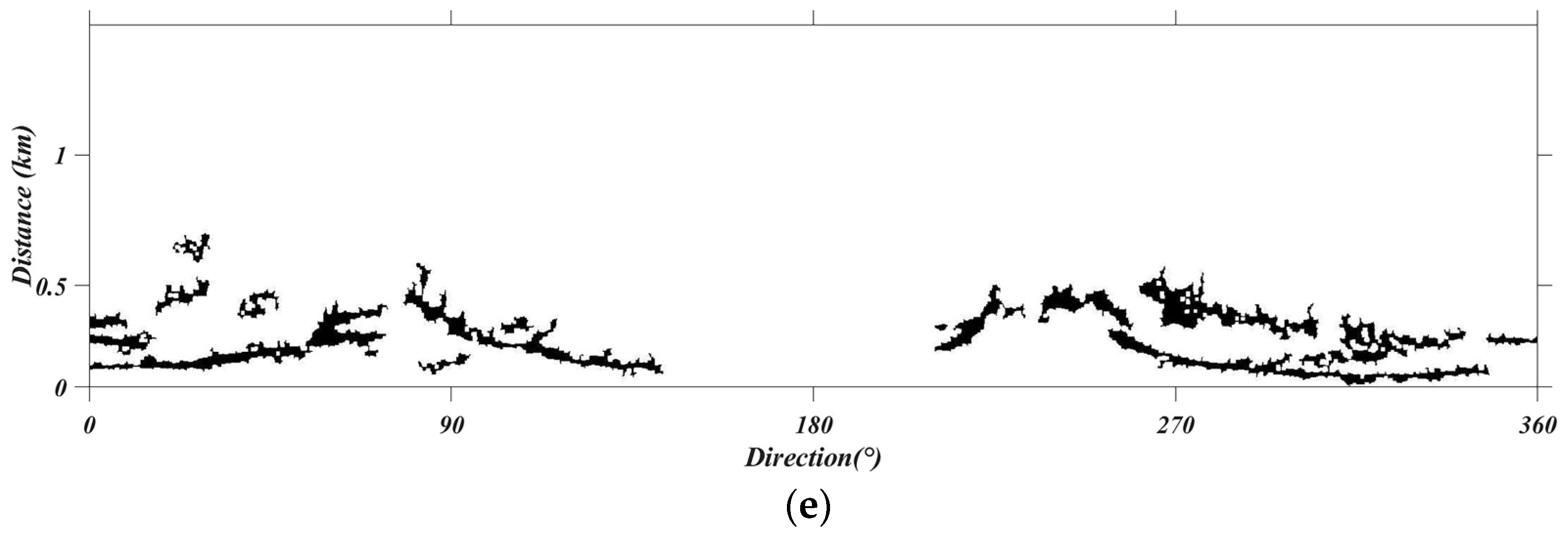
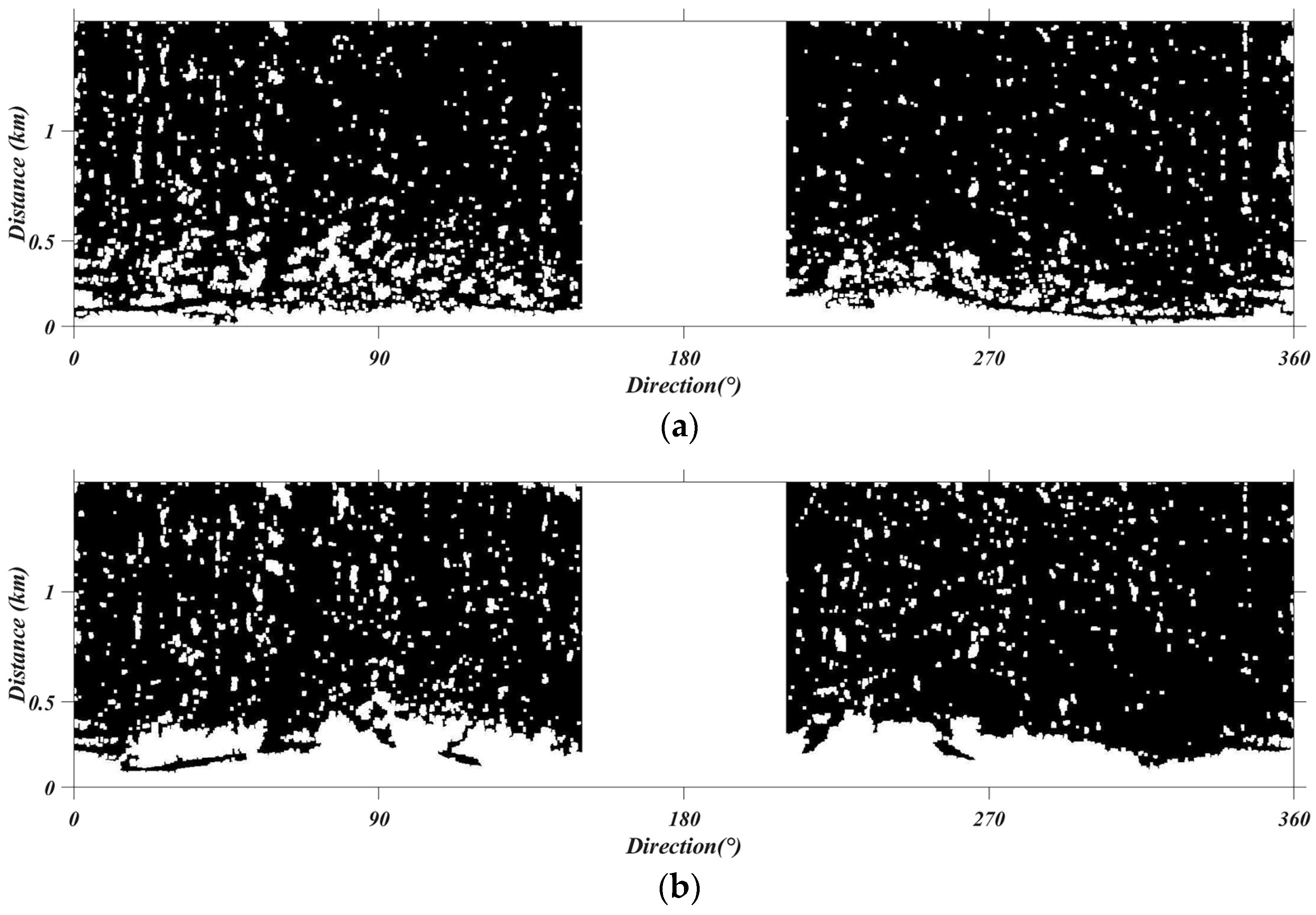
4.3. Image Segmentation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Radhakrishnan, H.; Panagiotakis, C.; Lardner, R. Multidisciplinary Oil Spill Modeling to Protect Coastal Communities and the Environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 36882. [Google Scholar] [CrossRef] [PubMed]
- Lardner, R.; Zodiatis, G. Modelling Oil Plumes from Subsurface Spills. Mar. Pollut. Bull. 2017, 124, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Lan, P.; Zhao, K.; Yu, L.; Zhou, L.; Wang, Y.; Deng, C. Biomimetic Modification of Sponges with Alkyl-Silica Hybrid Nanowires for Efficient Oil-Water Separation Applications. Surf. Interfaces 2025, 69, 106766. [Google Scholar] [CrossRef]
- Patil, S.; Desai, P.; Lavate, S.; Patil, S.; Patil, S. Innovative Oil Skimmer Machine for Liquid Contaminant Removal: An Environmental Friendly Approach. Reg. Stud. Mar. Sci. 2025, 86, 104184. [Google Scholar] [CrossRef]
- Si, J.; Miao, Z.; Wang, B.; Zheng, Z.; Yuan, Z.; Wang, Q.; Qiu, S.; Zeng, S.; Liu, X.; Cui, Z. Super-Elastic Compressible Chitosan/Chlorella Pyrenoidosa-Graphene Biomass Aerogel with Accordion-like Structure for All-Weather and High-Efficiency Cleanup of Crude Oil Spills. Sep. Purif. Technol. 2025, 367, 132887. [Google Scholar] [CrossRef]
- Zhu, J.; Zhu, M.; Li, J.; Liu, X.; Wang, Y.; Chen, X.; Liu, L.; Song, P. Superhydrophobic Fire-Extinguishing Polyurethane Foam for Solar-Assisted High-Efficiency Recovery of Viscous Crude Oil Spill. Sep. Purif. Technol. 2025, 364, 132531. [Google Scholar] [CrossRef]
- Ji, H.; Zhang, X.; Wang, T.; Yang, K.; Jiang, J.; Xing, Z. Oil Spill Area Prediction Model of Submarine Pipeline Based on BP Neural Network and Convolutional Neural Network. Process Saf. Environ. Protect. 2025, 199, 107264. [Google Scholar] [CrossRef]
- Almeida, R. The Effects of Oil Spills on Marine Life and Coastal Communities. Int. J. Geogr. Geol. Environ. 2023, 5, 263–265. [Google Scholar] [CrossRef]
- Li, P.; Cai, Q.; Lin, W.; Chen, B.; Zhang, B. Offshore Oil Spill Response Practices and Emerging Challenges. Mar. Pollut. Bull. 2016, 110, 6–27. [Google Scholar] [CrossRef]
- Bui, N.A.; Oh, Y.; Lee, I. Oil Spill Detection and Classification through Deep Learning and Tailored Data Augmentation. Int. J. Appl. Earth Obs. Geoinf 2024, 129, 103845. [Google Scholar] [CrossRef]
- Nost, E.; Egset, C. Oil Spill Detection System-Results from Field Trials. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–22 September 2006. [Google Scholar]
- Gangeskar, R. Automatic Oil-Spill Detection by Marine X-Band Radars-New System Based on Capturing and Processing Digitized Radar Images: Ready for Extensive Tests in October. Sea Technol. 2004, 45, 40–45. [Google Scholar]
- Atanassov, V.; Mladenov, L.; Rangelov, R.; Savchenko, A. Observation of Oil Slicks on the Sea Surface by Using Marine Navigation Radar. In Proceedings of the IGARSS’91 Remote Sensing: Global Monitoring for Earth Management, Espoo, Finland, 3–6 June 1991. [Google Scholar]
- Liu, P.; Li, Y.; Xu, J.; Zhu, X. Adaptive Enhancement of X-Band Marine Radar Imagery to Detect Oil Spill Segments. Sensors 2017, 17, 2349. [Google Scholar] [CrossRef]
- Xu, J.; Cheng, M.; Li, B.; Chu, L.; Dong, H.; Yang, Y.; Qian, S.; Huang, Y.; Yuan, J. Oil Slick Identification in Marine Radar Image Using HOG, Random Forest, and PSO. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1504305. [Google Scholar] [CrossRef]
- Fan, J.; Zhang, F.; Zhao, D.; Wang, J. Oil Spill Monitoring Based on SAR Remote Sensing Imagery. Aquat. Procedia 2015, 3, 112–118. [Google Scholar] [CrossRef]
- Li, B.; Xu, J.; Pan, X.; Chen, R.; Ma, L.; Yin, J.; Liao, Z.; Chu, L.; Zhao, Z.; Lian, J.; et al. Preliminary Investigation on Marine Radar Oil Spill Monitoring Method Using YOLO Model. JMSE 2023, 11, 670. [Google Scholar] [CrossRef]
- Chen, P.; Zhou, H.; Li, Y.; Liu, B.; Liu, P. Oil Spill Identification in Radar Images Using a Soft Attention Segmentation Model. Remote Sens. 2022, 14, 2180. [Google Scholar] [CrossRef]
- Zuiderveld, K. Contrast Limited Adaptive Histogram Equalization. In Graphics Gems; Elsevier: Amsterdam, The Netherlands, 1994; Volume 8, pp. 474–485. [Google Scholar]
- Wang, Q.; Ward, R. Fast Image/Video Contrast Enhancement Based on Weighted Thresholded Histogram Equalization. IEEE Trans. Consumer Electron. 2007, 53, 757–764. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Maurya, S.; Meena, A.K. MFO-Based Thresholded and Weighted Histogram Scheme for Brightness Preserving Image Enhancement. IET Image Process. 2019, 13, 896–909. [Google Scholar] [CrossRef]
- Provenzi, E.; Fierro, M.; Rizzi, A.; De Carli, L.; Gadia, D.; Marini, D. Random Spray Retinex: A New Retinex Implementation to Investigate the Local Properties of the Model. IEEE Trans. Image Process. 2007, 16, 162–171. [Google Scholar] [CrossRef]
- Bae, H.; Lee, S.-H. Multi-Scale Random Sprays Retinex Based on Edge-Adaptive Surround Integration. JKITS 2020, 18, 93–105. [Google Scholar] [CrossRef]
- Fu, X.; Zeng, D.; Huang, Y.; Zhang, X.-P.; Ding, X. A Weighted Variational Model for Simultaneous Reflectance and Illumi-nation Estimation. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2782–2790. [Google Scholar]
- Ranganath, H.S.; Kuntimad, G.; Johnson, J.L. Pulse Coupled Neural Networks for Image Processing. In Proceedings of the IEEE Southeastcon ’95. Visualize the Future, Raleigh, NC, USA, 26–29 March 1995; pp. 37–43. [Google Scholar]
- Koteswara Rao, K.; Veera Swamy, K. Multimodal Medical Image Fusion Using the MBM-PCNN Model. IETE J. Res. 2025. [Google Scholar] [CrossRef]
- Xu, J.; Huang, Y.; Dong, H.; Chu, L.; Yang, Y.; Li, Z.; Qian, S.; Cheng, M.; Li, B.; Liu, P.; et al. Marine Radar Oil Spill Detection Method Based on YOLOv8 and SA_PSO. JMSE 2024, 12, 1005. [Google Scholar] [CrossRef]
- Lau, T.-K.; Huang, K.-H. A Timely and Accurate Approach to Nearshore Oil Spill Monitoring Using Deep Learning and GIS. Sci. Total Environ 2024, 912, 169500. [Google Scholar] [CrossRef]
- Kundu, A.; Mitra, S.; Vaidyanathan, P. Application of Two-Dimensional Generalized Mean Filtering for Removal of Impulse Noises from Images. IEEE Trans. Acoust. Speech Signal Process. 1984, 32, 600–609. [Google Scholar] [CrossRef]
- Liu, P.; Liu, B.; Li, Y.; Chen, P.; Xu, J. Oil Spill Detection on X-Band Marine Radar Images Based on Sea Clutter Fitting Model. Heliyon 2023, 9, e20893. [Google Scholar] [CrossRef]
- Roth, S.; Black, M.J. Fields of Experts. Int. J. Comput. Vis. 2009, 82, 205–229. [Google Scholar] [CrossRef]
- Vamos¸, C.; Cr˘aciun, M. Automatic Trend Estimation; SpringerBriefs in Physics; Springer: Dordrecht, The Netherlands, 2013; ISBN 978-94-007-4824-8. [Google Scholar]
- Land, E.H.; McCann, J.J. Lightness and Retinex Theory. J. Opt. Soc. Am. 1971, 61, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Rahman, Z.; Jobson, D.J.; Woodell, G.A. Multi-Scale Retinex for Color Image Enhancement. In Proceedings of the 3rd IEEE International Conference on Image Processing, Lausanne, Switzerland, 19 September 1996; IEEE: Lausanne, Switzerland, 1996; Volume 3, pp. 1003–1006. [Google Scholar]
- Land, E.H. The Retinex Theory of Color Vision. Sci. Am. 1977, 237, 108–128. [Google Scholar] [CrossRef]
- Jobson, D.J.; Rahman, Z.; Woodell, G.A. A Multiscale Retinex for Bridging the Gap between Color Images and the Human Observation of Scenes. IEEE Trans. Image Process. 1997, 6, 965–976. [Google Scholar] [CrossRef]
- Jingchun, Z.; Su, G.E.; Sunar, M.S. Low-Light Image Enhancement: A Comprehensive Review on Methods, Datasets and Evaluation Metrics. J. King Saud Univ. Comput. Inf. Sci. 2024, 36, 102234. [Google Scholar] [CrossRef]
- Qi, Y.; Yang, Z.; Sun, W.; Lou, M.; Lian, J.; Zhao, W.; Deng, X.; Ma, Y. A Comprehensive Overview of Image Enhancement Techniques. Arch. Computat. Methods Eng. 2022, 29, 583–607. [Google Scholar] [CrossRef]
- Acharya, A.; Giri, A.V. Contrast Improvement Using Local Gamma Correction. In Proceedings of the 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020; pp. 110–114. [Google Scholar]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Huang, C.; Li, X.; Wen, Y. AN OTSU Image Segmentation Based on Fruitfly Optimization Algorithm. Alex. Eng. J. 2021, 60, 183–188. [Google Scholar] [CrossRef]
- Haralick, R.M.; Sternberg, S.R.; Zhuang, X. Image Analysis Using Mathematical Morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, PAMI-9, 532–550. [Google Scholar] [CrossRef]
- Aggarwal, G.; Agarwal, V. A Survey Paper on: Fuzzy Mathematical Morphology Techniques for Digital Image Processing. Adv. Mater. 2012, 403–408, 3469–3475. [Google Scholar] [CrossRef]
- Ahmad, M.; Butt, M.H.F.; Khan, A.M.; Mazzara, M.; Distefano, S.; Usama, M.; Roy, S.K.; Chanussot, J.; Hong, D. Spatial–Spectral Morphological Mamba for Hyperspectral Image Classification. IJON 2025, 636, 129995. [Google Scholar] [CrossRef]
- Agaian, S.S.; Lentz, K.P.; Grigoryan, A.M. A New Measure of Image Enhancement. In Proceedings of the IASTED International Conference on Signal Processing & Communication, Marbella, Spain, 19–22 September 2000. [Google Scholar]
- Kim, J.Y.; Kim, L.S.; Hwang, S.H. An Advanced Contrast Enhancement Using Partially Overlapped Sub-Block Histogram Equalization. T-CSVT 2000, 4, 537–540. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameters |
|---|---|
| Working frequency | 9.41 GHz |
| Antenna length | 8 ft |
| Polarization | Horizontal |
| Detection range | 0.5–12 nautical miles |
| Horizontal direction | 360° |
| Angular Resolution | 0.1° |
| Vertical direction | ±10° |
| Peak power | 25 kW |
| Pulse width | 50 ns/250 ns/750 ns |
| Pulse repetition frequency | 3000 Hz/1800 Hz/785 Hz |
| Blind zone | 0.06 nautical mile |
| Background Fitting | MSR | Gamma Correction |
|---|---|---|
| Method | Contrast | |
|---|---|---|
| Pre-processed radar image | 67.39 | 54.54 |
| Background-removed image | 25.83 | 5.55 |
| Background-removed + MSR | 63.47 | 56.14 |
| Background-removed + Gamma correction | 24.85 | 3.53 |
| Proposed multi-stage enhancement workflow | 84.55 | 127.82 |
| Method | CLAHE | POSHE | Proposed Multi-Stage Enhancement Workflow |
|---|---|---|---|
| Contrast | 66.25 | 68.18 | 84.55 |
| 107.84 | 109.14 | 127.82 |
| Detection Performance Metrics | Values |
|---|---|
| 0.31 | |
| 0.33 | |
| 0.85 | |
| 0.95 | |
| 0.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Zhao, X.; Wang, X.; Shao, P.; Chen, P.; Zhu, X.; Xu, J.; Li, Y.; Liu, B. A Multi-Stage Enhancement Based on the Attenuation Characteristics of X-Band Marine Radar Images for Oil Spill Extraction. Oceans 2025, 6, 39. https://doi.org/10.3390/oceans6030039
Liu P, Zhao X, Wang X, Shao P, Chen P, Zhu X, Xu J, Li Y, Liu B. A Multi-Stage Enhancement Based on the Attenuation Characteristics of X-Band Marine Radar Images for Oil Spill Extraction. Oceans. 2025; 6(3):39. https://doi.org/10.3390/oceans6030039
Chicago/Turabian StyleLiu, Peng, Xingquan Zhao, Xuchong Wang, Pengzhe Shao, Peng Chen, Xueyuan Zhu, Jin Xu, Ying Li, and Bingxin Liu. 2025. "A Multi-Stage Enhancement Based on the Attenuation Characteristics of X-Band Marine Radar Images for Oil Spill Extraction" Oceans 6, no. 3: 39. https://doi.org/10.3390/oceans6030039
APA StyleLiu, P., Zhao, X., Wang, X., Shao, P., Chen, P., Zhu, X., Xu, J., Li, Y., & Liu, B. (2025). A Multi-Stage Enhancement Based on the Attenuation Characteristics of X-Band Marine Radar Images for Oil Spill Extraction. Oceans, 6(3), 39. https://doi.org/10.3390/oceans6030039