
Large Language Models (LLMs) as Traffic Control Systems at Urban Intersections: A New Paradigm




Abstract
1. Introduction
- Proposing a novel paradigm where LLMs act as dynamic traffic controllers, leveraging their logical reasoning, scene understanding, and decision-making capabilities.
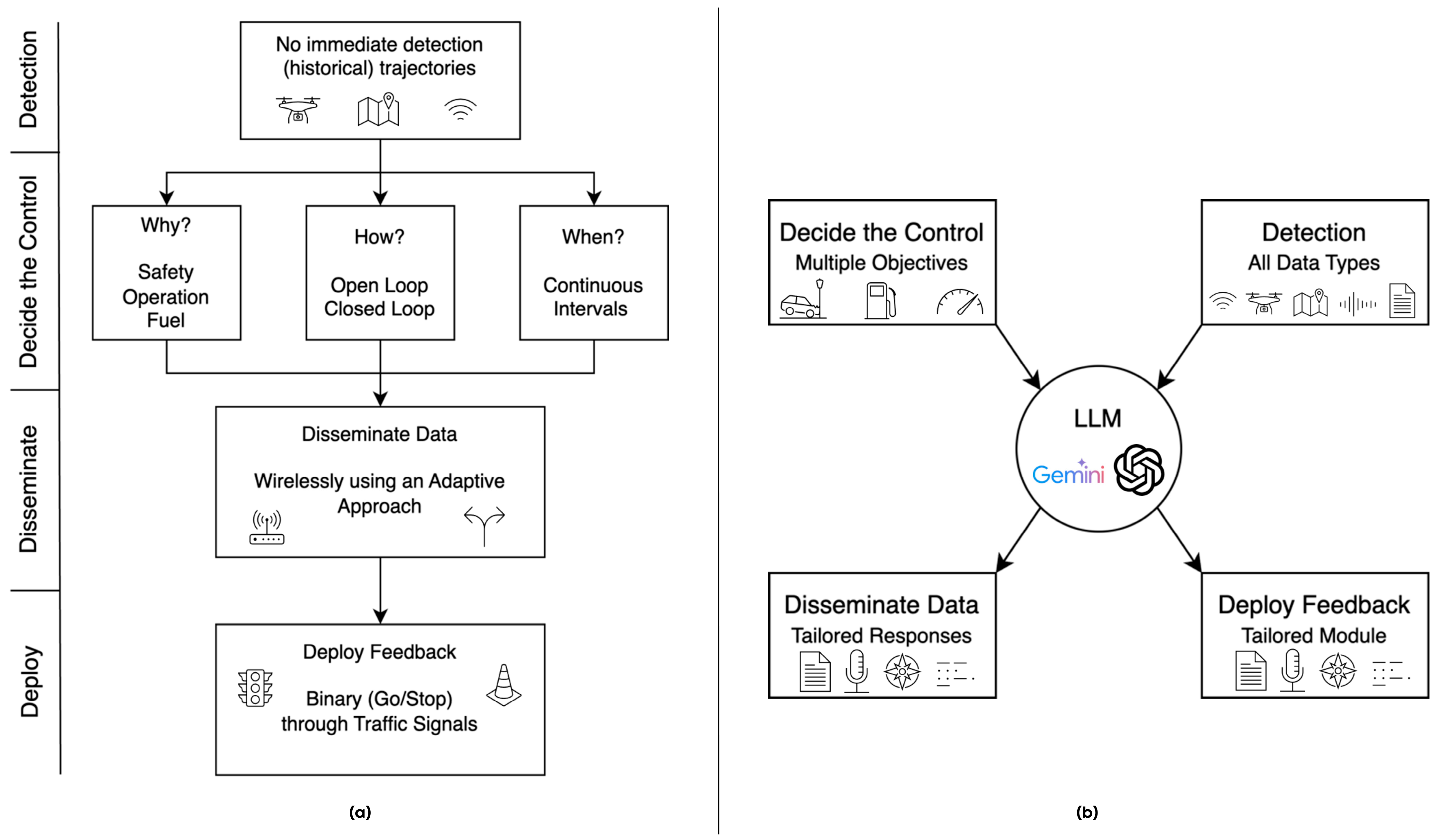
- Presenting an LLM-based method through the concept of 4D traffic control system (i.e., Detect, Decide, Disseminate, Deploy) that centralizes traffic control processes traditionally managed by disconnected components.
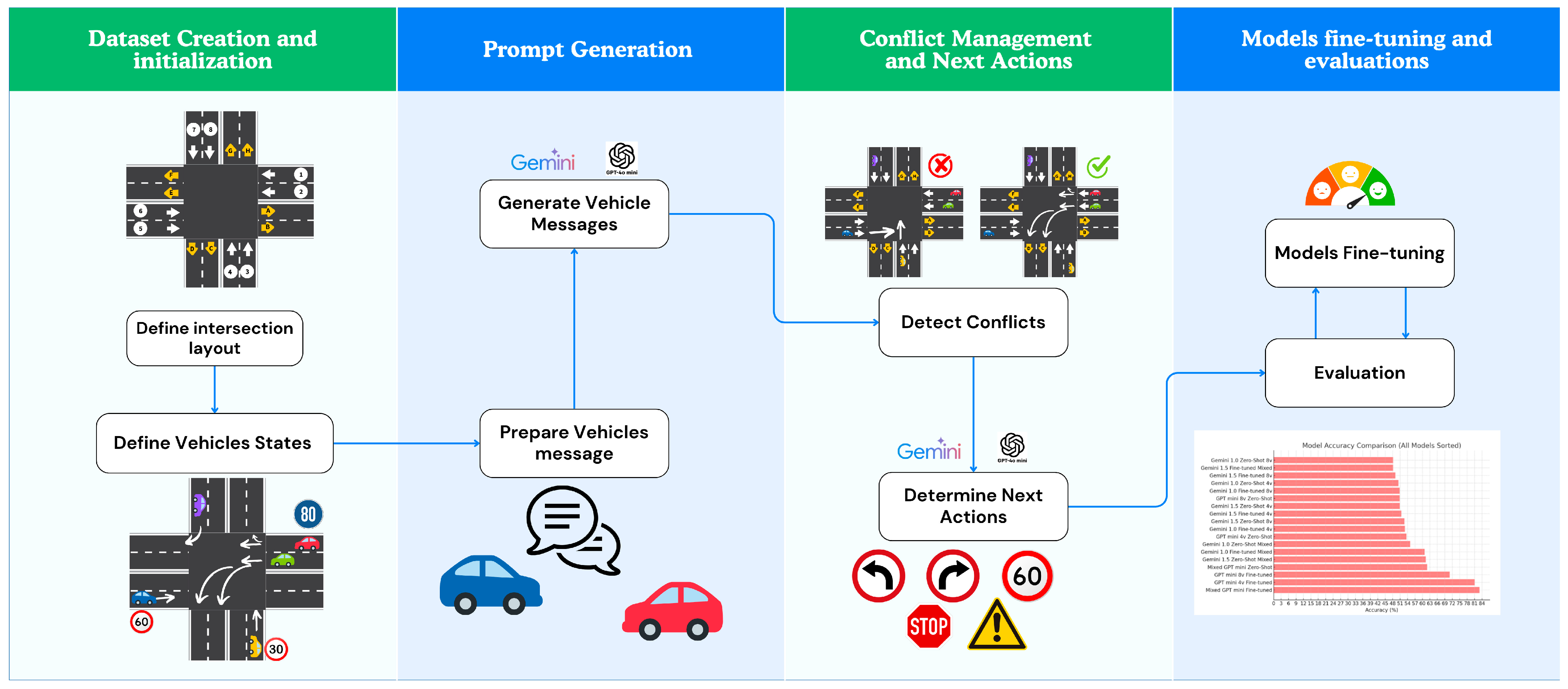
- Outlining a four-stage process for integrating LLMs into traffic control, including data creation and initialization, prompt generation using the chain-of-thought (CoT) method, conflict identification and resolution, and fine-tuning and performance analysis.
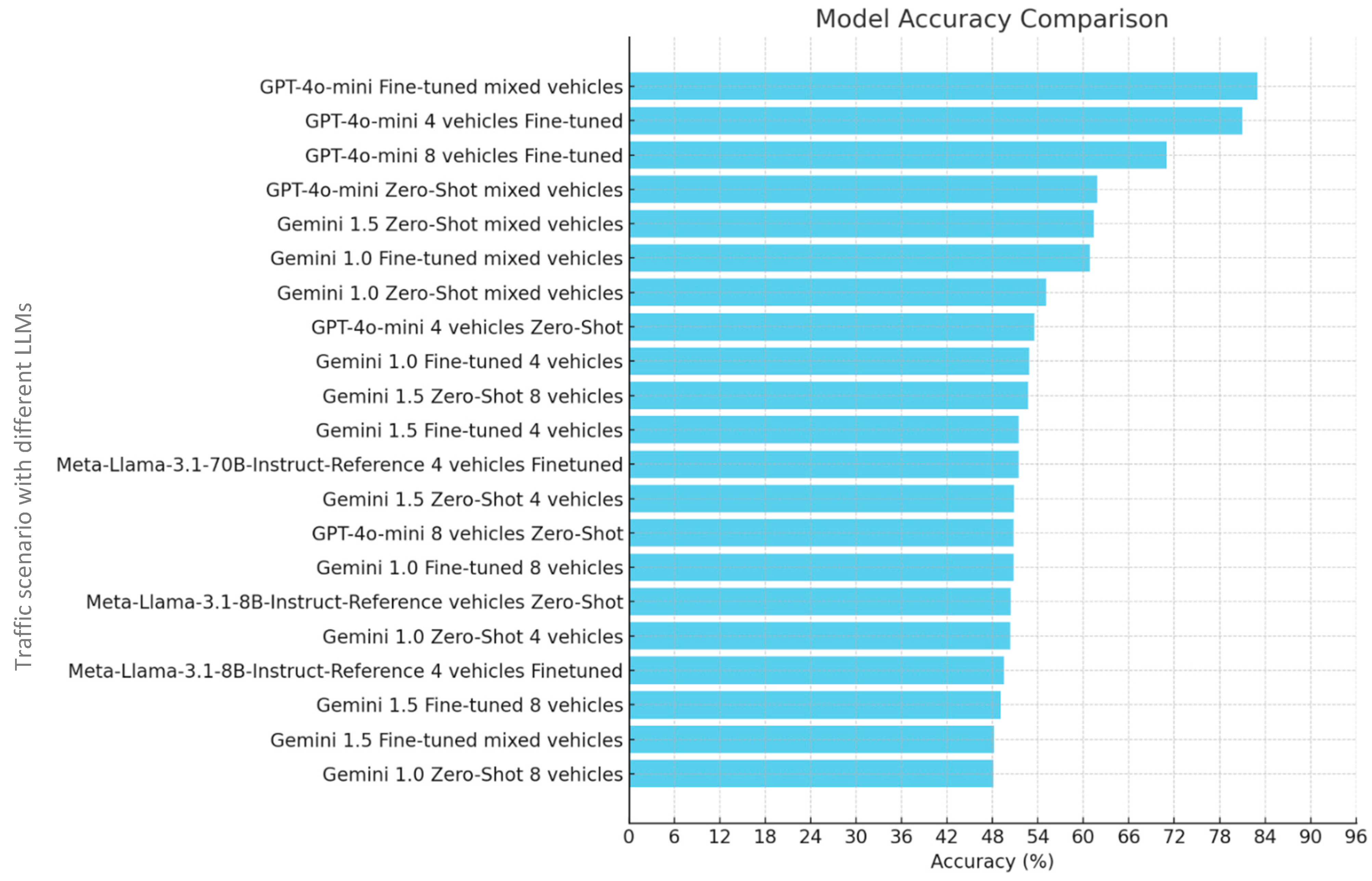
- Evaluating the performance of LLMs using metrics such as accuracy, precision, recall, F1-score, and Recall-Oriented Understudy for Gisting Evaluation (ROUGE-L). It identifies the Generative Pre-trained Transformer (GPT-4o-mini) model as the most effective in conflict detection and traffic management tasks.
2. LLMs as Traffic Control Systems: A New Paradigm
3. Background
4. Methodology
4.1. Dataset Creation and Initialization
4.2. Prompt Design
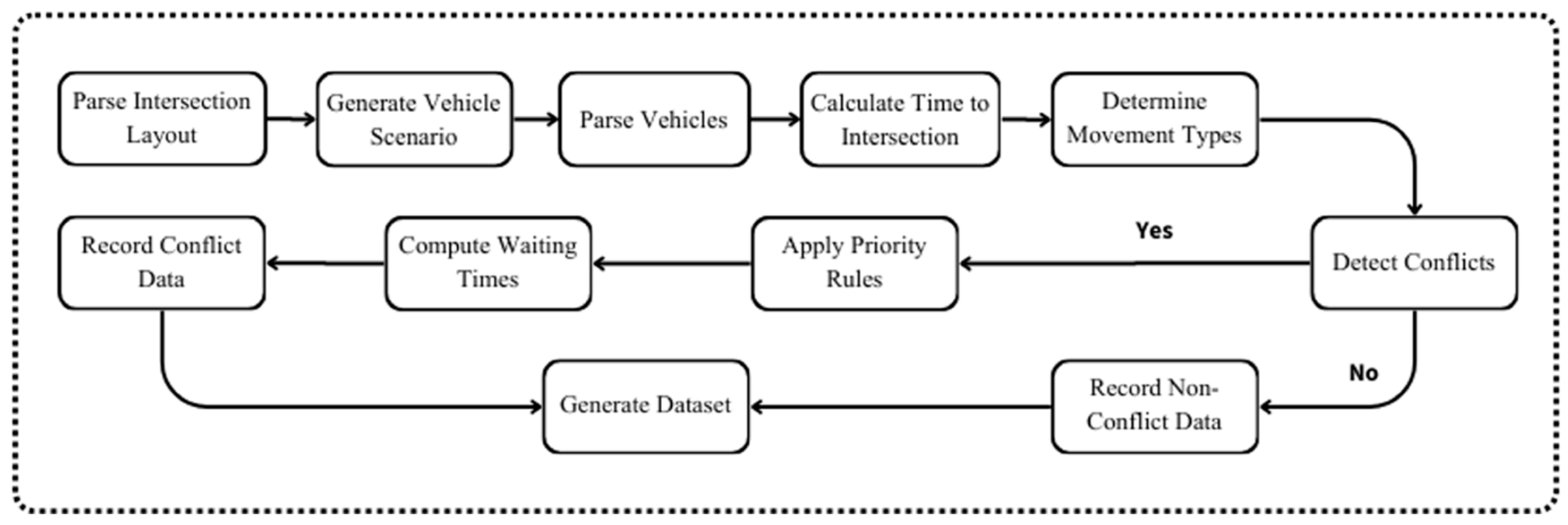
4.3. Conflict Detection
4.4. Model Selection and Fine-Tuning
5. Analysis and Results
5.1. Logical Reasoning Results
5.2. Decision-Making and Feedback Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bucsuházy, K.; Matuchová, E.; Zůvala, R.; Moravcová, P.; Kostíková, M.; Mikulec, R. Human factors contributing to the road traffic accident occurrence. Transp. Res. Procedia 2020, 45, 555–561. [Google Scholar] [CrossRef]
- Movahedi, M.; Choi, J. The Crossroads of LLM and Traffic Control: A Study on Large Language Models in Adaptive Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2024. [Google Scholar] [CrossRef]
- Mahmud, D.; Hajmohamed, H.; Almentheri, S.; Alqaydi, S.; Aldhaheri, L.; Khalil, R.A.; Saeed, N. Integrating LLMs with ITS: Recent Advances, Potentials, Challenges, and Future Directions. arXiv 2025, arXiv:2501.04437. [Google Scholar] [CrossRef]
- Rakha, H.; Amer, A.; El-Shawarby, I. Modeling Driver Behavior within a Signalized Intersection Approach Decision–Dilemma Zone. Transp. Res. Rec. J. Transp. Res. Board 2008, 2069, 16–25. [Google Scholar] [CrossRef]
- Macioszek, E.; Kurek, A. Road traffic distribution on public holidays and workdays on selected road transport network elements. Transp. Probl. 2021, 16, 127–138. [Google Scholar] [CrossRef]
- Ashqer, M.I.; Ashqar, H.I.; Elhenawy, M.; Almannaa, M.; Aljamal, M.A.; Rakha, H.A.; Bikdash, M. Evaluating a signalized intersection performance using unmanned aerial Data. Transp. Lett. 2024, 16, 452–460. [Google Scholar] [CrossRef]
- Distefano, N. Physiological and driving behaviour changes associated to different road intersections. Eur. Transp. Eur. 2020, 77, 4–16. [Google Scholar] [CrossRef]
- Stevanovic, A.; Dobrota, N.; Mitrovic, N. NCHRP 20-07/Task 414: Benefits of Adaptive Traffic Control Deployments—A Review of Evaluation Studies; NCHRP: Washington, DC, USA, 2019. [Google Scholar]
- Lai, S.; Xu, Z.; Zhang, W.; Liu, H.; Xiong, H. Large language models as traffic signal control agents: Capacity and opportunity. arXiv 2023, arXiv:2312.16044. [Google Scholar]
- Khanfar, N.O.; Elhenawy, M.; Ashqar, H.I.; Hussain, Q.; Alhajyaseen, W.K.M. Driving behavior classification at signalized intersections using vehicle kinematics: Application of unsupervised machine learning. Int. J. Inj. Control Saf. Promot. 2022, 30, 34–44. [Google Scholar] [CrossRef]
- Yarlagadda, J.; Pawar, D.S. Heterogeneity in the Driver Behavior: An Exploratory Study Using Real-Time Driving Data. J. Adv. Transp. 2022, 2022, 4509071. [Google Scholar] [CrossRef]
- Bella, F.; Silvestri, M. Interaction driver–bicyclist on rural roads: Effects of cross-sections and road geometric elements. Accid. Anal. Prev. 2017, 102, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Abu Hamad, F.; Hasiba, R.; Shahwan, D.; Ashqar, H.I. Driver Behavior at Roundabouts in Mixed Traffic: A Case Study Using Machine Learning. J. Transp. Eng. Part A Syst. 2024, 150, 05024004. [Google Scholar] [CrossRef]
- Hadi, M.U.; Qureshi, R.; Shah, A.; Irfan, M.; Zafar, A.; Shaikh, M.B.; Akhtar, N.; Wu, J.; Mirjalili, S. A Survey on Large Language Models: Applications, Challenges, Limitations, and Practical Usage. TechRxiv 2023. [Google Scholar] [CrossRef]
- Mohammadnazar, A.; Patwary, A.L.; Moradloo, N.; Arvin, R.; Khattak, A.J. Incorporating driving volatility measures in safety performance functions: Improving safety at signalized intersections. Accid. Anal. Prev. 2022, 178, 106872. [Google Scholar] [CrossRef]
- Ashqar, H.I.; Obaid, M.; Jaber, A.; Ashqar, R.; Khanfar, N.O.; Elhenawy, M. Incorporating driving behavior into vehicle fuel consumption prediction: Methodology development and testing. Discov. Sustain. 2024, 5, 344. [Google Scholar] [CrossRef]
- Sha, H.; Mu, Y.; Jiang, Y.; Chen, L.; Xu, C.; Luo, P.; Li, S.E.; Tomizuka, M.; Zhan, W.; Ding, M. Languagempc: Large language models as decision makers for autonomous driving. arXiv 2023, arXiv:2310.03026. [Google Scholar]
- Tong, K.; Solmaz, S. ConnectGPT: Connect Large Language Models with Connected and Automated Vehicles. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju-si, Republic of Korea, 2–5 June 2024; IEEE: New York, NY, USA, 2024; pp. 581–588. [Google Scholar]
- Zhang, Z.; Sun, Y.; Wang, Z.; Nie, Y.; Ma, X.; Sun, P.; Li, R. Large Language Models for Mobility in Transportation Systems: A Survey on Forecasting Tasks. arXiv 2024, arXiv:2405.02357. [Google Scholar]
- Hadi, M.U.; Qureshi, R.; Shah, A.; Irfan, M.; Zafar, A.; Shaikh, M.B.; Akhtar, N.; Wu, J.; Mirjalili, S. Large language models: A comprehensive survey of its applications, challenges, limitations, and future prospects. TechRxiv 2023. [Google Scholar] [CrossRef]
- Ashqar, H.I.; Jaber, A.; Alhadidi, T.I.; Elhenawy, M. Advancing Object Detection in Transportation with Multimodal Large Language Models (MLLMs): A Comprehensive Review and Empirical Testing. arXiv 2024, arXiv:2409.18286. [Google Scholar]
- Zheng, O.; Abdel-Aty, M.; Wang, D.; Wang, Z.; Ding, S. Chatgpt is on the horizon: Could a large language model be all we need for intelligent transportation? arXiv 2023, arXiv:2303.05382. [Google Scholar]
- Ren, Y.; Chen, Y.; Liu, S.; Wang, B.; Yu, H.; Cui, Z. TPLLM: A Traffic Prediction Framework Based on Pretrained Large Language Models. arXiv 2024, arXiv:2403.02221. [Google Scholar]
- Zhang, S.; Fu, D.; Liang, W.; Zhang, Z.; Yu, B.; Cai, P.; Yao, B. TrafficGPT: Viewing, processing and interacting with traffic foundation models. Transp. Policy 2024, 150, 95–105. [Google Scholar] [CrossRef]
- Jain, S.; Thapa, S.; Chen, K.-T.; Abbott, A.L.; Sarkar, A. Semantic Understanding of Traffic Scenes with Large Vision Language Models. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju-si, Republic of Korea, 2–5 June 2024; IEEE: New York, NY, USA, 2024; pp. 1580–1587. [Google Scholar] [CrossRef]
- Cui, C.; Ma, Y.; Cao, X.; Ye, W.; Wang, Z. Receive, reason, and react: Drive as you say, with large language models in autonomous vehicles. IEEE Intell. Transp. Syst. Mag. 2024, 16, 81–94. [Google Scholar] [CrossRef]
- Ramanishka, V.; Chen, Y.-T.; Misu, T.; Saenko, K. Toward driving scene understanding: A dataset for learning driver behavior and causal reasoning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7699–7707. [Google Scholar]
- Elhenawy, M.; Abutahoun, A.; Alhadidi, T.I.; Jaber, A.; Ashqar, H.I.; Jaradat, S.; Abdelhay, A.; Glaser, S.; Rakotonirainy, A. Visual Reasoning and Multi-Agent Approach in Multimodal Large Language Models (MLLMs): Solving TSP and mTSP Combinatorial Challenges. Mach. Learn. Knowl. Extr. 2024, 6, 1894–1920. [Google Scholar] [CrossRef]
- Jaradat, S.; Nayak, R.; Paz, A.; Ashqar, H.I.; Elhenawy, M. Multitask Learning for Crash Analysis: A Fine-Tuned LLM Framework Using Twitter Data. Smart Cities 2024, 7, 2422–2465. [Google Scholar] [CrossRef]
- Tang, Y.; Dai, X.; Zhao, C.; Cheng, Q.; Lv, Y. Large Language Model-Driven Urban Traffic Signal Control. In Proceedings of the 2024 Australian & New Zealand Control Conference (ANZCC), Gold Coast, Australia, 1–2 February 2024; pp. 67–71. [Google Scholar] [CrossRef]
- Zhang, D.; Zheng, H.; Yue, W.; Wang, X. Advancing ITS Applications with LLMs: A Survey on Traffic Management, Transportation Safety, and Autonomous Driving. In International Joint Conference on Rough Sets; Springer: Cham, Switzerland, 2024; pp. 295–309. [Google Scholar]
- Pang, A.; Wang, M.; Pun, M.-O.; Chen, C.S.; Xiong, X. iLLM-TSC: Integration reinforcement learning and large language model for traffic signal control policy improvement. arXiv 2024, arXiv:2407.06025. [Google Scholar]
- Wang, M.; Pang, A.; Kan, Y.; Pun, M.-O.; Chen, C.S.; Huang, B. LLM-assisted light: Leveraging large language model capabilities for human-mimetic traffic signal control in complex urban environments. arXiv 2024, arXiv:2403.08337. [Google Scholar]
- Li, L.; Jiang, R.; He, Z.; Chen, X.M.; Zhou, X. Trajectory data-based traffic flow studies: A revisit. Transp. Res. Part C Emerg. Technol. 2020, 114, 225–240. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, Y.; Xie, E.; Zhao, Z.; Guo, Y.; Wong, K.Y.K.; Li, Z.; Zhao, H. Drivegpt4: Interpretable end-to-end autonomous driving via large language model. arXiv 2023, arXiv:2310.01412. [Google Scholar] [CrossRef]
- Gordon, R.L.; Reiss, R.A.; Haenel, H.; Case, E.; French, R.L.; Mohaddes, A.; Wolcott, R. Traffic Control Systems Handbook; United States Federal Highway Administration Office of Technology Applications: Washington, DC, USA, 1996.
- Day, C.M.; Langdon, S.; Stevanovic, A.; Tanaka, A.; Lee, K.; Smaglik, E.J.; Overn, L.; Agarwal, N.; Richardson, L.; Philips, S. Traffic signal systems research: Past, present, and future trends. Centen. Pap. 2019. Available online: http://onlinepubs.trb.org/onlinepubs/centennial/papers/AHB25-Final.pdf (accessed on 1 November 2023).
- Abu Tami, M.; Ashqar, H.I.; Elhenawy, M.; Glaser, S.; Rakotonirainy, A. Using Multimodal Large Language Models (MLLMs) for Automated Detection of Traffic Safety-Critical Events. Vehicles 2024, 6, 1571–1590. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, M.; Zagar, B.L.; Yurtsever, E.; Knoll, A.C. Vision language models in autonomous driving and intelligent transportation systems. arXiv 2023, arXiv:2310.14414. [Google Scholar]
- Ashqar, H.I.; Alhadidi, T.I.; Elhenawy, M.; Khanfar, N.O. Leveraging Multimodal Large Language Models (MLLMs) for Enhanced Object Detection and Scene Understanding in Thermal Images for Autonomous Driving Systems. Automation 2024, 5, 508–526. [Google Scholar] [CrossRef]
- Yan, Z.; Zhou, H.; Tabassum, H.; Liu, X. Hybrid LLM-DDQN based Joint Optimization of V2I Communication and Autonomous Driving. arXiv 2024, arXiv:2410.08854. [Google Scholar]
- Desai, B.; Patil, K. Secure and Scalable Multi-Modal Vehicle Systems: A Cloud-Based Framework for Real-Time LLM-Driven Interactions. Innov. Comput. Sci. J. 2023, 9, 1–11. [Google Scholar]
- Rakha, H.; Zohdy, I.; Du, J.; Park, B.B.; Lee, J.; El-Metwally, M. Traffic Signal Control Enhancements Under Vehicle Infrastructure Integration Systems; Mid-Atlantic Universities Transportation Center: Charlottesville, VA, USA, 2011. [Google Scholar]
- Tashtoush, Y.M.; Darweesh, D.A.; Hussari, G.; Darwish, O.A.; Darwish, Y.; Issa, L.B.; Ashqar, H.I. Agile Approaches for Cybersecurity Systems, IoT and Intelligent Transportation. IEEE Access 2022, 10, 1360–1375. [Google Scholar] [CrossRef]
- Ouallane, A.A.; Bahnasse, A.; Bakali, A.; Talea, M. Overview of Road Traffic Management Solutions based on IoT and AI. Procedia Comput. Sci. 2022, 198, 518–523. [Google Scholar] [CrossRef]
- Almukhalfi, H.; Noor, A.; Noor, T.H. Traffic management approaches using machine learning and deep learning techniques: A survey. Eng. Appl. Artif. Intell. 2024, 133, 108147. [Google Scholar] [CrossRef]
- Raiaan, M.A.K.; Mukta, M.S.H.; Fatema, K.; Fahad, N.M.; Sakib, S.; Mim, M.M.J.; Ahmad, J.; Ali, M.E.; Azam, S. A review on large Language Models: Architectures, applications, taxonomies, open issues and challenges. IEEE Access 2024, 12, 26839–26874. [Google Scholar] [CrossRef]
- Mani, S.K.; Zhou, Y.; Hsieh, K.; Segarra, S.; Eberl, T.; Azulai, E.; Frizler, I.; Chandra, R.; Kandula, S. Enhancing Network Management Using Code Generated by Large Language Models. In Proceedings of the 22nd ACM Workshop on Hot Topics in Networks, Cambridge, MA, USA, 28–29 November 2023; ACM: New York, NY, USA, 2023; pp. 196–204. [Google Scholar] [CrossRef]
- Liu, J.; Hang, P.; Qi, X.; Wang, J.; Sun, J. MTD-GPT: A Multi-Task Decision-Making GPT Model for Autonomous Driving at Unsignalized Intersections. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023; IEEE: New York, NY, USA, 2023; pp. 5154–5161. [Google Scholar] [CrossRef]
- Elhenawy, M.; Ashqar, H.I.; Rakotonirainy, A.; Alhadidi, T.I.; Jaber, A.; Tami, M.A. Vision-Language Models for Autonomous Driving: CLIP-Based Dynamic Scene Understanding. arXiv 2025, arXiv:2501.05566. [Google Scholar]
- Sivakumar, M.; Belle, A.B.; Shan, J.; Shahandashti, K.K. Prompting GPT –4 to support automatic safety case generation. Expert Syst. Appl. 2024, 255, 124653. [Google Scholar] [CrossRef]
- Jiang, R.; Yin, D.; Wang, Z.; Wang, Y.; Deng, J.; Liu, H.; Cai, Z.; Deng, J.; Song, X.; Shibasaki, R. DL-Traff: Survey and Benchmark of Deep Learning Models for Urban Traffic Prediction. In Proceedings of the 30th ACM International Conference on Information & Knowledge Management, Gold Coast, Australia, 1–5 November 2021; ACM: New York, NY, USA, 2021; pp. 4515–4525. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Description |
|---|---|
| Vehicle_ID | Unique identifier for the vehicle |
| Lane | The lane number the vehicle is in |
| Speed | Vehicle’s speed in km/h |
| Distance_to_Intersection | Distance from the vehicle to the intersection (in meters) |
| Direction | Direction of approach (north, east, south, and west) |
| Destination (Egress) | Intended exit lane number from the intersection |
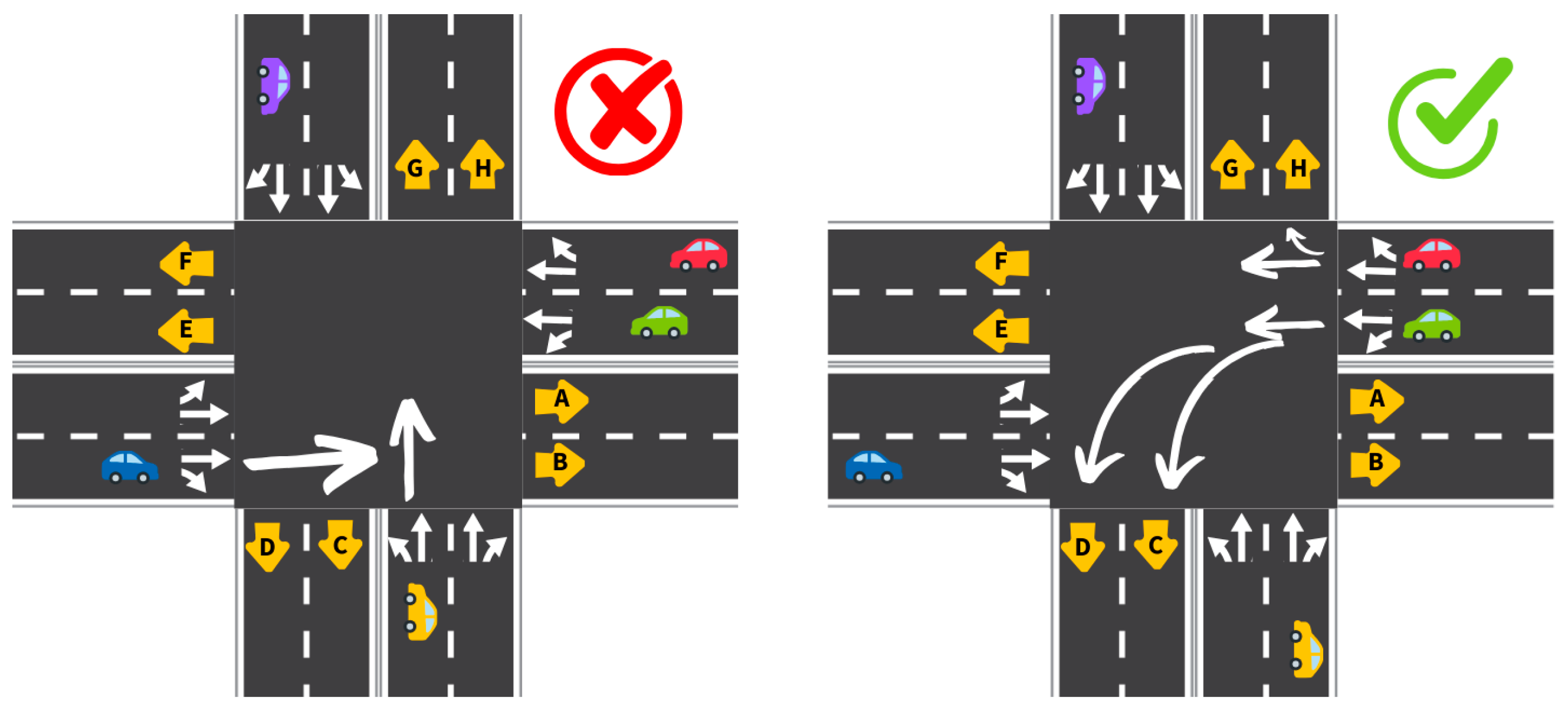
| You are an Urban Intersection Traffic Conflict Detector, responsible for monitoring a four-way intersection with traffic coming from the north, east, south, and west. Each direction has two lanes guiding vehicles to different destinations: - North: Lane 1 directs vehicles to F and H, Lane 2 directs vehicles to E, D, and C. - East: Lane 3 leads to H and B, Lane 4 leads to G, E, and F. - South: Lane 5 directs vehicles to B and D, Lane 6 directs vehicles to A, G, and H. - West: Lane 7 directs vehicles to D and F, Lane 8 directs vehicles to B, C, and A. Analyze the traffic data from all directions and lanes, and determine if there is a potential conflict between vehicles at the intersection. Respond only with ‘Yes’ or ‘No’ for conflict detection. Output: - If there **is a conflict**, provide a report with the following structure: **Conflict Status**: State whether a conflict is detected (e.g., “Conflict detected.”). **Conflicts Overview**: Mention the number of conflicts and any vehicles involved (e.g., “Number of conflicts: 1. Involved vehicles: Vehicle V1234 and Vehicle V5678.”). **Actions & Decisions**: Summarize any key decisions or actions taken (e.g., “Decisions: Vehicle V5678 must yield to Vehicle V1234.”). **Priority Assignment**: List the vehicles and their assigned priorities (e.g., “Vehicle V1234: Priority 1, Vehicle V5678: Priority 2.”). **Vehicle Waiting Times**: Provide waiting times for each vehicle (e.g., “Vehicle V1234: 5 s, Vehicle V5678: 10 s.”). **The output format must exactly follow this structure in case of conflict:** |
| JSON Input { “vehicles_scenario”: [ { “vehicle_id”: “V1151”, “lane”: “2”, “speed”: 39.995323464891484, “distance_to_intersection”: 388.95660041889687, “direction”: “north”, “destination”: “C” }, { “vehicle_id”: “V5173”, “lane”: “8”, “speed”: 68.0915930855088, “distance_to_intersection”: 150.82949998592466, “direction”: “west”, “destination”: “B” }, { “vehicle_id”: “V8617”, “lane”: “1”, “speed”: 43.411746756299856, “distance_to_intersection”: 180.7639436593828, “direction”: “north”, “destination”: “F” }, { “vehicle_id”: “V2618”, “lane”: “4”, “speed”: 63.24744202519462, “distance_to_intersection”: 366.3390574707282, “direction”: “east”, “destination”: “F” } ] } | Input Vehicle V7155 is in lane 2, moving north at a speed of 30.86 km/h, and is 88.54 m away from the intersection, heading towards D. Vehicle V6439 is in lane 3, moving east at a speed of 53.37 km/h, and is 107.50 m away from the intersection, heading towards B. Vehicle V5182 is in lane 7, moving west at a speed of 47.69 km/h, and is 94.67 m away from the intersection, heading towards D. Vehicle V2432 is in lane 1, moving north at a speed of 46.17 km/h, and is 74.59 m away from the intersection, heading towards H. |
| JSON Output { “is_conflict”: “yes”, “number_of_conflicts”: 4, “places_of_conflicts”: [ “intersection”, “intersection”, “intersection”, “intersection” ], “conflict_vehicles”: [ { “vehicle1_id”: “V7155”, “vehicle2_id”: “V6439” }, { “vehicle1_id”: “V7155”, “vehicle2_id”: “V5182” }, { “vehicle1_id”: “V6439”, “vehicle2_id”: “V2432” }, { “vehicle1_id”: “V5182”, “vehicle2_id”: “V2432” } ], “decisions”: [ “Potential conflict: Vehicle V7155 must yield to Vehicle V6439”, “Potential conflict: Vehicle V7155 must yield to Vehicle V5182”, “Potential conflict: Vehicle V6439 must yield to Vehicle V2432”, “Potential conflict: Vehicle V5182 must yield to Vehicle V2432” ], “priority_order”: { “V2432”: 1, “V5182”: 2, “V6439”: 3, “V7155”: 4 }, “waiting_times”: { “V2432”: 0, “V5182”: 1, “V6439”: 3, “V7155”: 2 } } | Output **Conflict Status**: Conflict detected. **Conflicts Overview**: Number of conflicts: 4. Involved vehicles: Vehicle V7155 and Vehicle V6439, Vehicle V7155 and Vehicle V5182, Vehicle V6439 and Vehicle V2432, Vehicle V5182 and Vehicle V2432. **Actions & Decisions**: Decisions: Potential conflict: Vehicle V7155 must yield to Vehicle V6439, Potential conflict: Vehicle V7155 must yield to Vehicle V5182, Potential conflict: Vehicle V6439 must yield to Vehicle V2432, Potential conflict: Vehicle V5182 must yield to Vehicle V2432 **Priority Assignment**: Vehicle V2432: Priority 1, Vehicle V5182: Priority 2, Vehicle V6439: Priority 3, Vehicle V7155: Priority 4. **Vehicle Waiting Times**: - Vehicle V2432: 0 s - Vehicle V5182: 1 s - Vehicle V6439: 3 s - Vehicle V7155: 2 s |
| Model | Learning Method | Scenario | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|---|---|
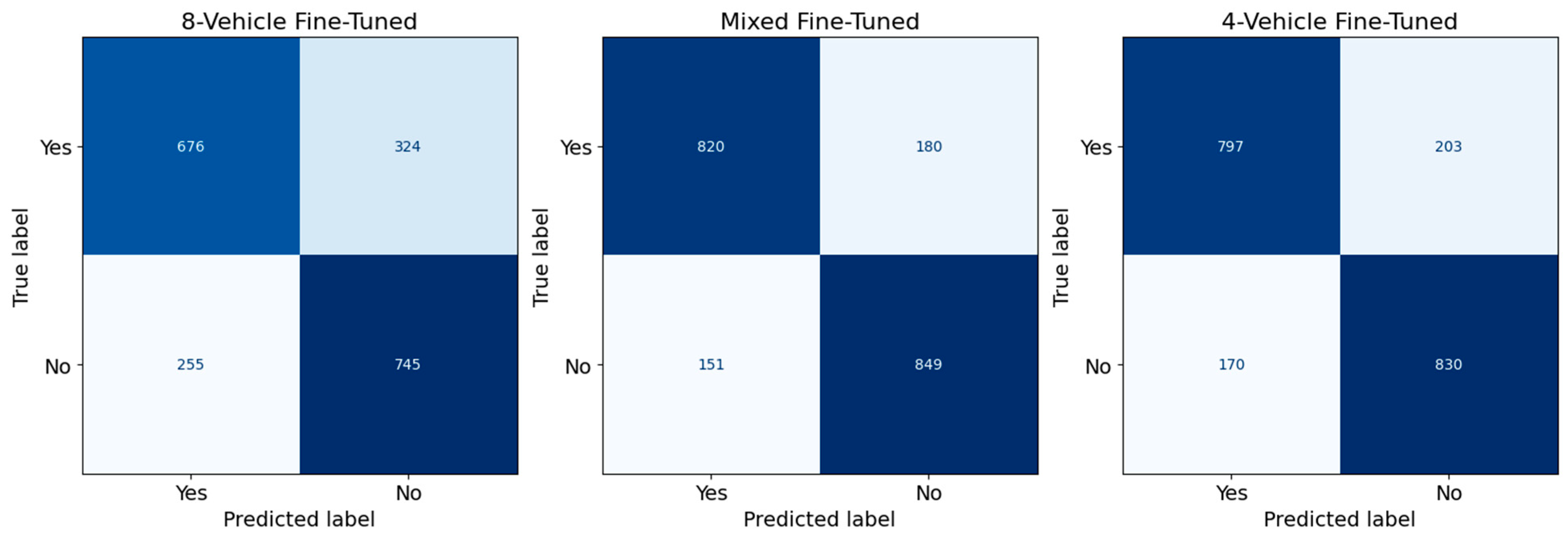
| GPT-4o-mini | fine-tuning | mixed-vehicle | 83.0 | 0.83 | 0.85 | 0.84 |
| fine-tuning | 4-vehicle | 81.0 | 0.80 | 0.83 | 0.82 | |
| fine-tuning | 8-vehicle | 71.0 | 0.70 | 0.74 | 0.72 | |
| zero-shot | mixed-vehicle | 61.9 | 0.59 | 0.62 | 0.60 | |
| zero-shot | 4-vehicle | 53.6 | 0.53 | 0.54 | 0.53 | |
| zero-shot | 8-vehicle | 50.8 | 0.50 | 0.51 | 0.42 | |
| Gemini 1.5 | zero-shot | 8-vehicle | 52.8 | 0.55 | 0.77 | 0.62 |
| fine-tuning | 4-vehicle | 51.5 | 0.51 | 0.48 | 0.50 | |
| zero-shot | 4-vehicle | 50.9 | 0.51 | 0.54 | 0.52 | |
| fine-tuning | 8-vehicle | 49.1 | 0.49 | 0.50 | 0.49 | |
| fine-tuning | mixed-vehicle | 48.2 | 0.49 | 0.72 | 0.58 | |
| zero-shot | mixed-vehicle | 61.4 | 0.62 | 0.60 | 0.61 | |
| Gemini 1.0 | fine-tuning | mixed-vehicle | 60.9 | 0.61 | 0.62 | 0.61 |
| zero-shot | mixed-vehicle | 55.1 | 0.57 | 0.42 | 0.49 | |
| fine-tuning | 4-vehicle | 52.9 | 0.55 | 0.73 | 0.61 | |
| fine-tuning | 8-vehicle | 50.8 | 0.60 | 0.05 | 0.09 | |
| zero-shot | 4-vehicle | 50.4 | 0.50 | 0.58 | 0.54 | |
| zero-shot | 8-vehicle | 48.2 | 0.47 | 0.48 | 0.45 | |
| Llama-3.1-8B-Instruct | zero-shot | mixed-vehicle | 50.4 | 0.52 | 0.50 | 0.37 |
| fine-tuning | 4-vehicle | 49.6 | 0.49 | 0.50 | 0.43 | |
| Llama-3.1-70B-Instruct | fine-tuning | 4-vehicle | 51.5 | 0.51 | 0.51 | 0.51 |
| Scenario Input | Fine-Tuned GPT-Mini Output |
|---|---|
| Vehicle V7406 is in lane 7, moving west at a speed of 27.59 km/h, and is 182.12 m away from the intersection, heading towards D. Vehicle V4625 is in lane 3, moving east at a speed of 49.97 km/h, and is 189.12 m away from the intersection, heading towards B. Vehicle V1909 is in lane 8, moving west at a speed of 75.90 km/h, and is 263.27 m away from the intersection, heading towards C. Vehicle V2327 is in lane 8, moving west at a speed of 26.36 km/h, and is 445.70 m away from the intersection, heading towards A. | **Conflict Status**: Yes **Conflict Analysis**: A conflict is detected between Vehicle V4625 and Vehicle V1909. Both vehicles are approaching the same intersection from opposite directions, and they are likely to reach the intersection at the same time due to their respective speeds and distances. **Recommendations**: To prevent a potential collision, it is recommended that Vehicle V1909 yield to Vehicle V4625, as V4625 has a slight advantage in distance. **Next Actions for Each Vehicle**: - Vehicle V4625: Continue straight towards the intersection - Vehicle V1909: Yield and prepare to adjust speed or trajectory if necessary |
| Vehicle V1975 is in lane 2, moving north at a speed of 61.28 km/h, and is 431.49 m away from the intersection, heading towards D. Vehicle V7019 is in lane 4, moving east at a speed of 50.89 km/h, and is 195.12 m away from the intersection, heading towards E. Vehicle V5264 is in lane 6, moving south at a speed of 73.17 km/h, and is 207.91 m away from the intersection, heading towards G. Vehicle V8370 is in lane 3, moving east at a speed of 25.37 km/h, and is 393.16 m away from the intersection, heading towards H. | **Conflict Status**: Yes **Conflict Analysis**: A potential conflict is detected between vehicles V7019 and V5264. Vehicle V7019 is approaching the intersection, while Vehicle V5264 is already entering the intersection; both are on a collision course. **Recommendations**: It is recommended that Vehicle V7019 yield to Vehicle V5264 to avoid conflict. **Next Actions for Each Vehicle**: - Vehicle V1975: No action - Vehicle V7019: Slow down and yield - Vehicle V5264: Continue at current speed - Vehicle V8370: No action |
| Vehicle V5009 is in lane 6, moving south at a speed of 45.37 km/h, and is 217.81 m away from the intersection, heading towards H. Vehicle V3191 is in lane 6, moving south at a speed of 68.86 km/h, and is 298.54 m away from the intersection, heading towards H. Vehicle V6111 is in lane 4, moving east at a speed of 78.52 km/h, and is 106.46 m away from the intersection, heading towards E. Vehicle V7721 is in lane 7, moving west at a speed of 44.52 km/h, and is 309.51 m away from the intersection, heading towards F. | **Conflict Status**: No **Conflict Analysis**: No conflicts detected among the vehicles. **Recommendations**: None **Next Actions for Each Vehicle**: - V5009: Continue moving south - V3191: Continue moving south - V6111: Continue moving east - V7721: Continue moving west |
| Vehicle V9867 is in lane 2, moving north at a speed of 65.73 km/h, and is 270.95 m away from the intersection, heading towards C. Vehicle V6094 is in lane 6, moving south at a speed of 61.93 km/h, and is 344.02 m away from the intersection, heading towards G. Vehicle V6070 is in lane 7, moving west at a speed of 59.35 km/h, and is 296.58 m away from the intersection, heading towards F. Vehicle V2692 is in lane 2, moving north at a speed of 46.17 km/h, and is 118.97 m away from the intersection, heading towards E. | **Conflict Status**: Yes **Conflict Analysis**: There is a conflict between Vehicle V9867 (northbound) and Vehicle V6070 (westbound). V9867 is approaching the intersection from the north at a speed of 65.73 km/h and is positioned 270.95 m away, while V6070 is approaching from the west at a speed of 59.35 km/h and has a distance of 296.58 m to the intersection. The distance to the intersection for both vehicles is similar, which can lead to an intersection conflict. **Recommendations**: The drivers of both vehicles should communicate well and gauge each other’s positions. It may be best for Vehicle V9867 to yield slightly to allow for safer navigation through the intersection. **Next Actions for Each Vehicle**: - Vehicle V9867: Yield slightly, if necessary, to allow V6070 to proceed safely through the intersection. - Vehicle V6070: Proceed without delay, being aware of V9867’s proximity. - Vehicle V6094: No action needed concerning the conflict. - Vehicle V2692: No action needed concerning the conflict. |
| Vehicle V6758 is in lane 4, moving east at a speed of 61.16 km/h, and is 413.33 m away from the intersection, heading towards F. Vehicle V5284 is in lane 2, moving north at a speed of 59.44 km/h, and is 248.61 m away from the intersection, heading towards D. Vehicle V6460 is in lane 5, moving south at a speed of 73.17 km/h, and is 363.19 m away from the intersection, heading towards B. Vehicle V9110 is in lane 7, moving west at a speed of 20.11 km/h, and is 65.18 m away from the intersection, heading towards D. | **Conflict Status**: Yes **Conflict Analysis**: A conflict exists between Vehicle V5284 and Vehicle V6460. They approach the intersection from different directions and will reach it at approximately the same moment, creating a potential collision risk. **Recommendations**: To resolve this conflict, Vehicle V6460 should yield to Vehicle V5284, allowing the smaller vehicle to navigate past the intersection first. **Next Actions for Each Vehicle**: - Vehicle V5284: Continue to the intersection as planned - Vehicle V6460: Slow down and prepare to yield to Vehicle V5284 - Vehicle V6758: No action - Vehicle V9110: No action |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masri, S.; Ashqar, H.I.; Elhenawy, M. Large Language Models (LLMs) as Traffic Control Systems at Urban Intersections: A New Paradigm. Vehicles 2025, 7, 11. https://doi.org/10.3390/vehicles7010011
Masri S, Ashqar HI, Elhenawy M. Large Language Models (LLMs) as Traffic Control Systems at Urban Intersections: A New Paradigm. Vehicles. 2025; 7(1):11. https://doi.org/10.3390/vehicles7010011
Chicago/Turabian StyleMasri, Sari, Huthaifa I. Ashqar, and Mohammed Elhenawy. 2025. "Large Language Models (LLMs) as Traffic Control Systems at Urban Intersections: A New Paradigm" Vehicles 7, no. 1: 11. https://doi.org/10.3390/vehicles7010011
APA StyleMasri, S., Ashqar, H. I., & Elhenawy, M. (2025). Large Language Models (LLMs) as Traffic Control Systems at Urban Intersections: A New Paradigm. Vehicles, 7(1), 11. https://doi.org/10.3390/vehicles7010011