


Predictive Optimal Control of Mild Hybrid Trucks



Abstract
1. Introduction
2. One-Dimensional Longitudinal Vehicle Dynamics
- Benefits of the predictive algorithm proposed are relative to baseline. Hence, a particular powertrain architecture will not affect the proposal in this work
- Axle and tire models are not explicitly defined except for using a rear axle ratio and coefficient of rolling resistance
- The battery management system is a simple SOC tracking (between 25% and 75%) with a look-up-based model for open-circuit voltage and internal resistance [28].
- Charging and discharging cycle is based on driver demand power. The hybrid system is charged within limits based on battery internal temperature limits whenever the driver demand power is negative. This is the case for regenerative braking. If the SOC is more than 75%, the hybrid system is not charged any more, even if the driver demand power is negative.
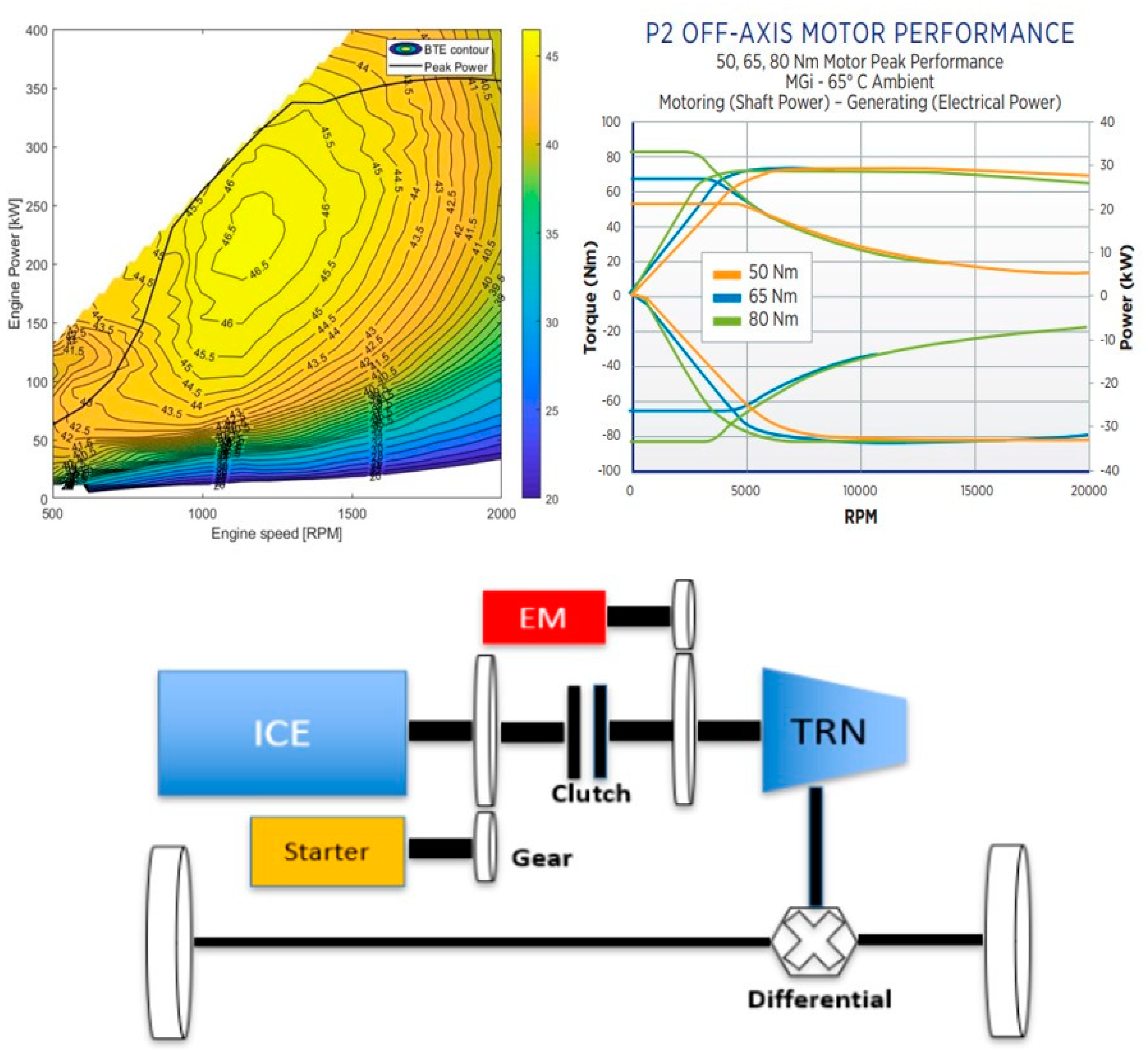
2.1. Internal Combustion Engine
2.2. Electrification System
2.3. Transmission System
2.4. Drive Line and Chassis
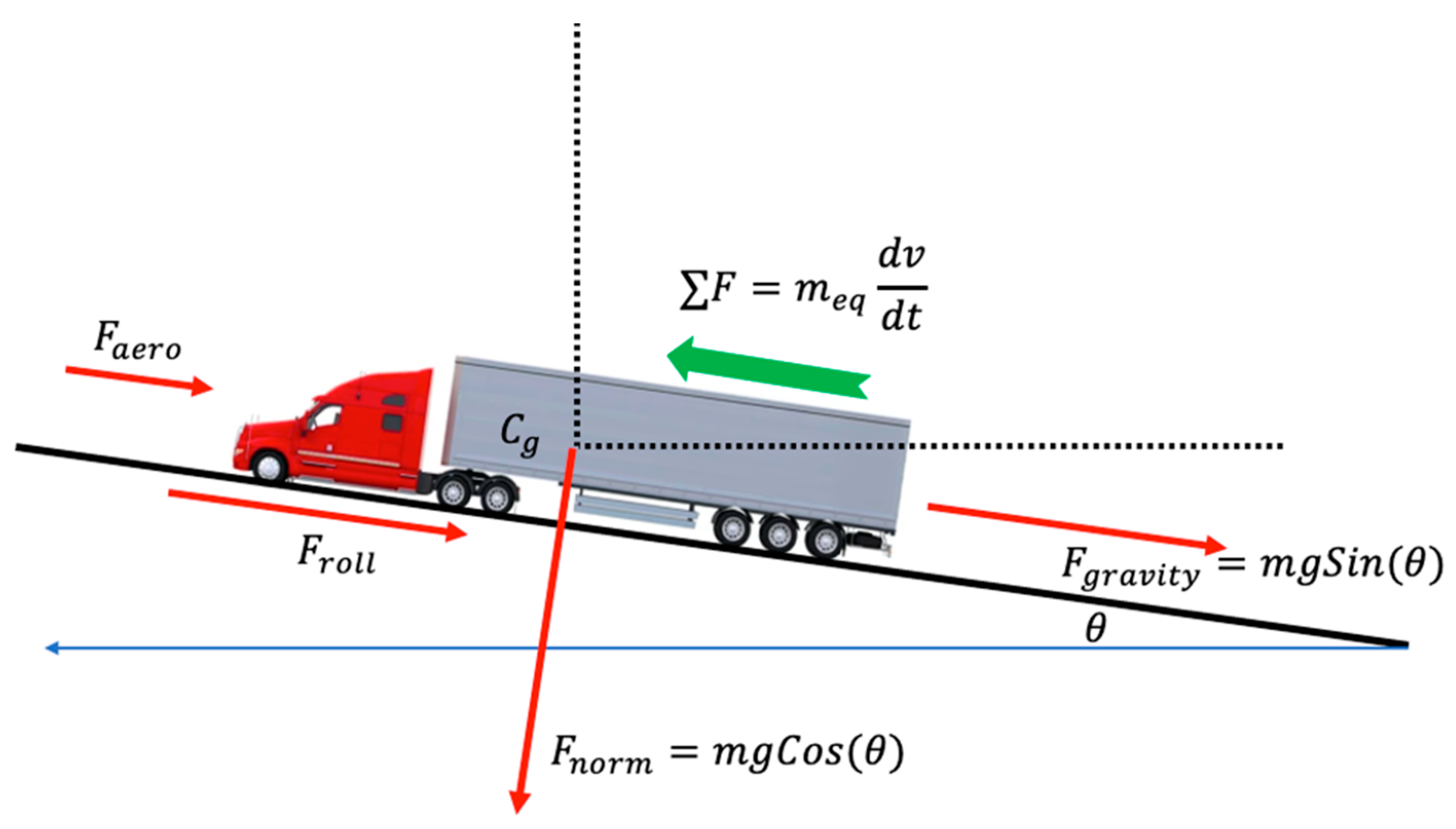
2.5. Force Balance
- Rotational compliance and coupling dynamics between components are not considered for the purpose of this research.
- Losses are considered constant instead of a function of any dependent variables.
- Map-based logic is used in every calculation possible to eliminate the need of complex analytical design.
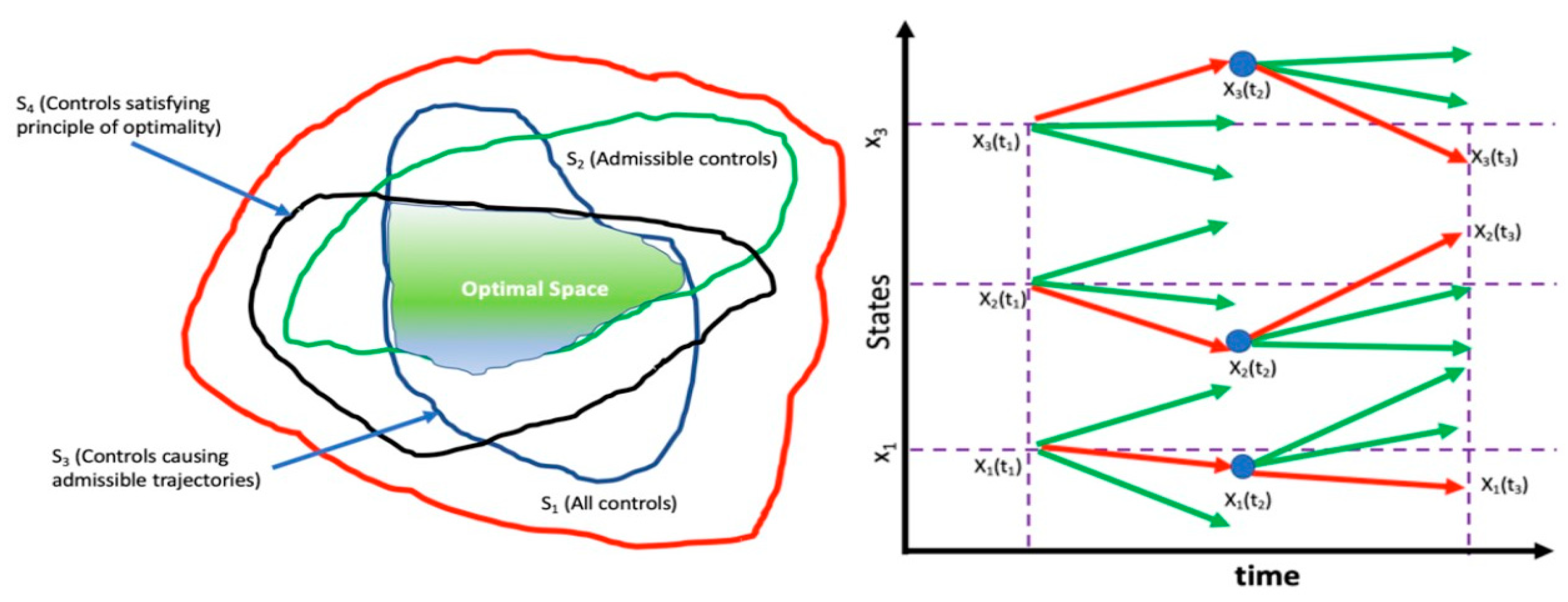
3. Problem Approach
Dynamic Program Formulation
4. Detailed Problem and Subsequent Simulation Results
4.1. Dynamic Speed Management
- 1 control input:
- u(s) = Throttle
- The primary output y(s) = [optimal vehicle speed target trajectory.
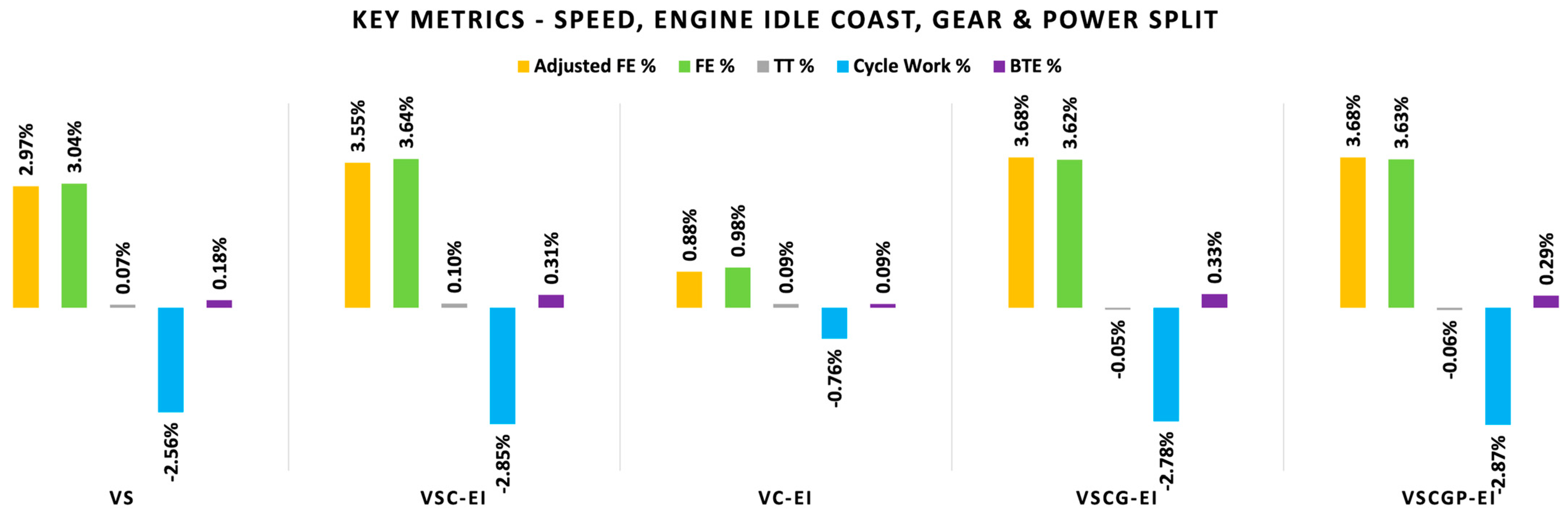
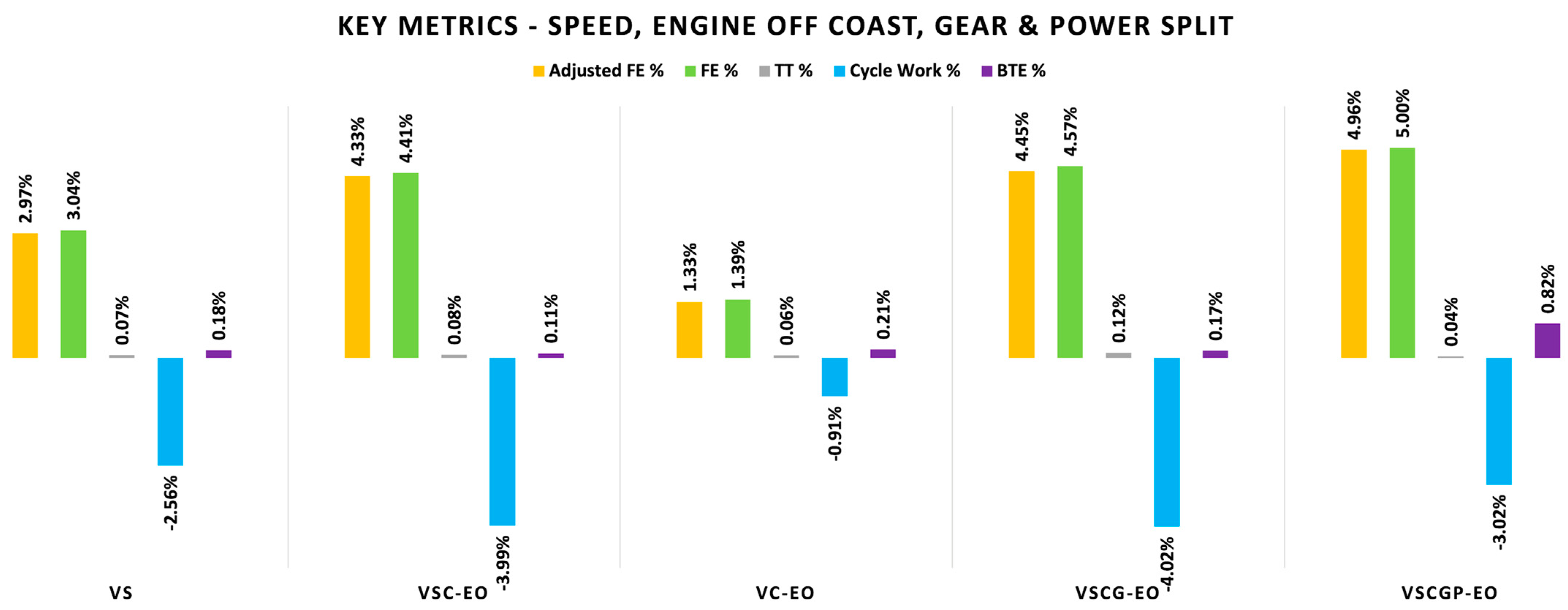
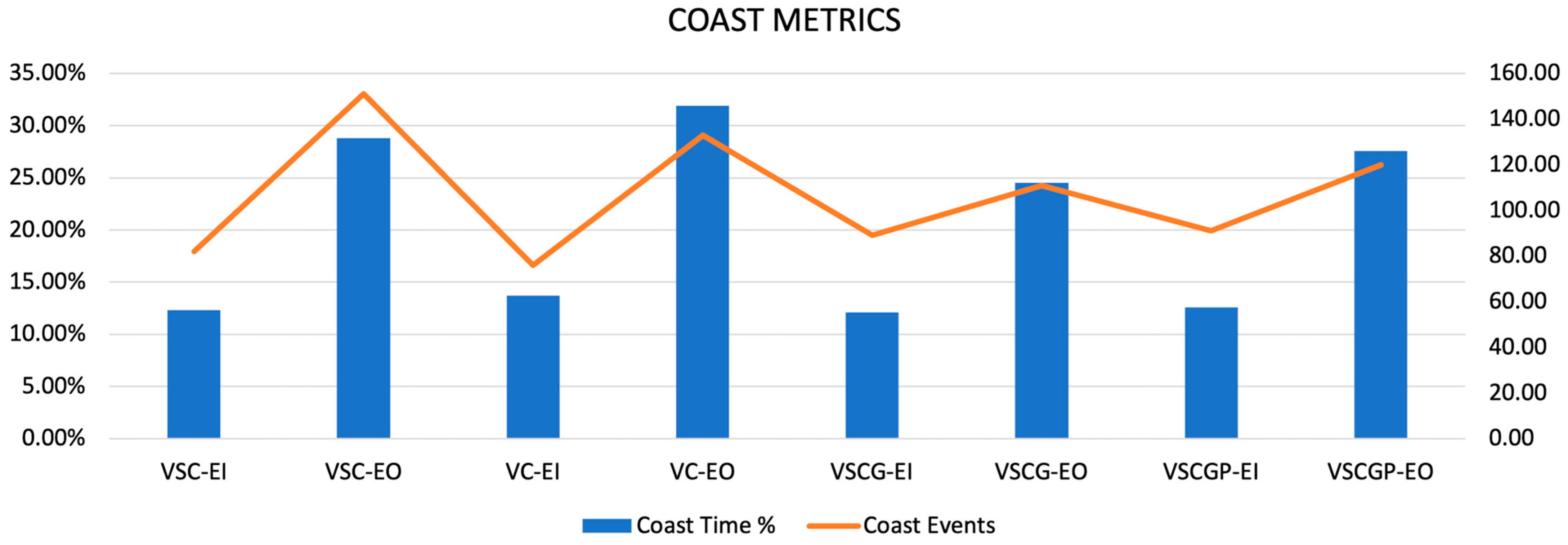
4.2. Dynamic Speed and Coast (Engine Idle + Engine Off) Management
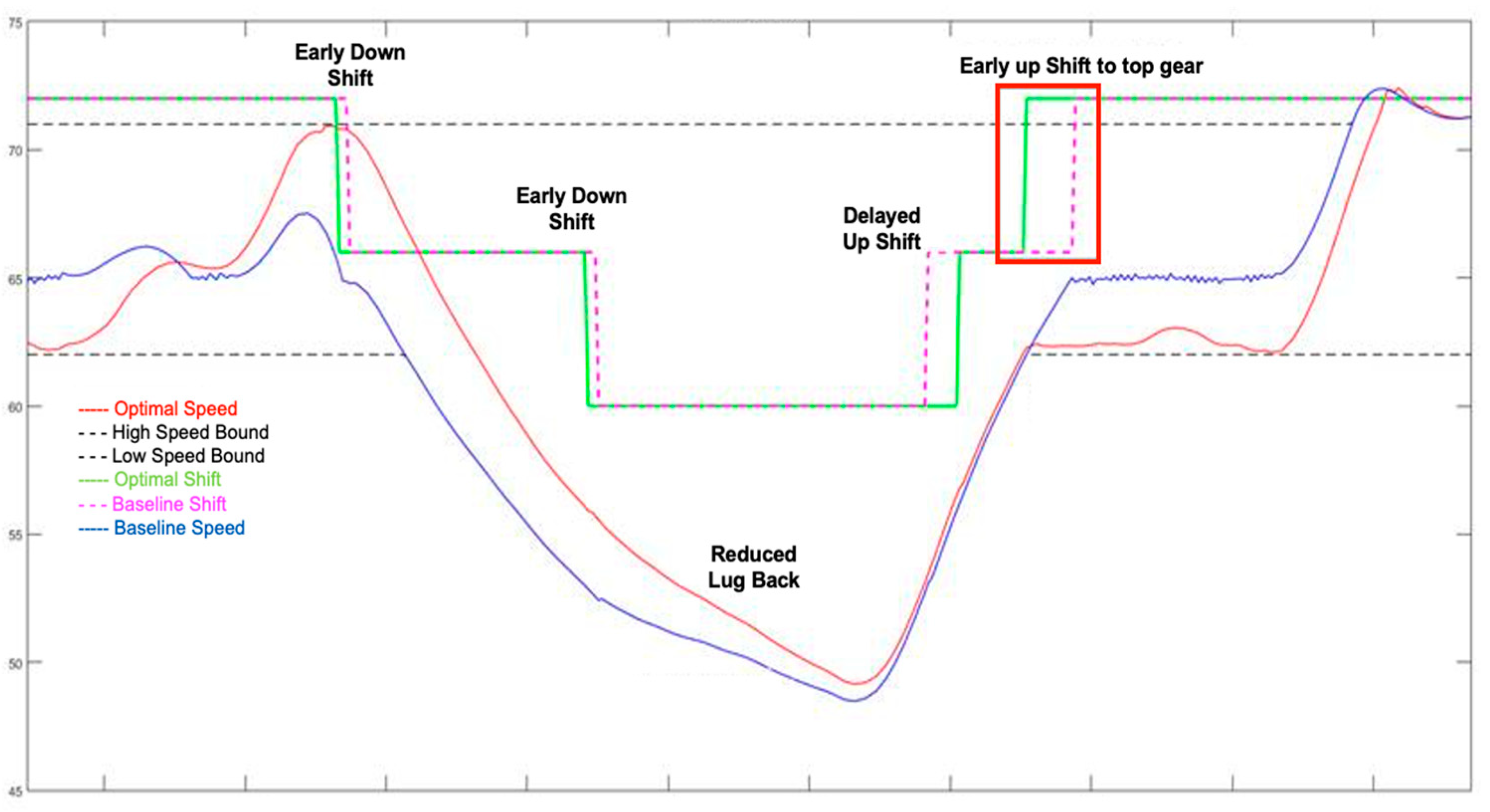
4.3. Dynamic Speed, Coast (Engine Idle + Engine Off) and Gear Management
4.4. Dynamic Speed, Coast (Engine Idle + Engine Off), Gear and Torque (Power Split) Management
5. Conclusions and Further Work
- Predictive road grade knowledge can help design control algorithms that will enable fuel savings depending on road grade profile
- Vehicle cruise speed can be increased within acceptable bounds (calibrated for drivability) before entering an uphill
- Vehicle cruise speed can be reduced within calibratable bounds before entering a downhill
- Down shift gear to a lower value predictively before hitting speed lug back travelling uphill
- Up shift gear predictively while still travelling uphill and before completely coming out of the hill
- Engine can be disengaged and turned off in mild down grade
- Engine can be disengaged for a short duration during the flat section of route with predictive speed modulation (increase speed then disengage)
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, X.; Cao, Y.; Jin, Z.; Tian, X.; Xue, M. An Adaptive ECMS Based on Traffic Information for Plug-in Hybrid Electric Buses. IEEE Trans. Ind. Electron. 2022, 1–10. [Google Scholar] [CrossRef]
- Guo, J.; Guo, Z.; Chu, L.; Zhao, D.; Hu, J.; Hou, Z. A Dual-Adaptive Equivalent Consumption Minimization Strategy for 4WD Plug-In Hybrid Electric Vehicles. Sensors 2022, 22, 6256. [Google Scholar] [CrossRef] [PubMed]
- Zecchi, L.; Sandrini, G.; Gadola, M.; Chindamo, D. Modeling of a Hybrid Fuel Cell Powertrain with Power Split Logic for Onboard Energy Management Using a Longitudinal Dynamics Simulation Tool. Energies 2022, 15, 6228. [Google Scholar] [CrossRef]
- Wang, Y.; Boggio-Marzet, A. Evaluation of eco-driving training for fuel efficiency and emissions reduction according to road type. Sustainability 2018, 10, 3891. [Google Scholar] [CrossRef]
- Scalarretta, A.; Serrao, L.; Dewangan, P.C.; Tona, P.; BergShoeff, E.N.D.; Bordons, C.; Hubacher, M.; Isenegger, P.; Lacandia, F.; Laveau, A.; et al. A control benchmark on the energy management of a plug-in-hybrid electric vehicle. Control Eng. Pract. 2014, 29, 287–298. [Google Scholar] [CrossRef]
- Nilsson, M.; Johannesson, L.; Askerdal, M. ADMM Applied to Energy Management of ancillary systems in truck. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 3459–3466. [Google Scholar]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEV’s. Rev. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Biral, F.; Bertolazzi, E.; Bossetti, P. Notes on numerical methods for solving optimal control problem. IEEE J. Ind. Appl. 2016, 5, 154–166. [Google Scholar] [CrossRef]
- Gao, Z.; LaClair, T.; Ou, S.; Huff, S.; Wu, G.; Hao, P.; Boriboonsomsin, K.; Barth, M. Evaluation of electric vehicle component performance over eco-driving cycles. Energy 2019, 172, 823–839. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Liu, H.; Rodgers, M.O.; Guensler, R.L. Eco-driving for transit: An effective strategy to conserve fuel and emissions. Appl. Energy 2017, 194, 784–797. [Google Scholar] [CrossRef]
- Terwen, S.; Back, M.; Krebs, V. Predictive Powertrain Control for Heavy Duty Trucks. IFAC Proc. Vol. 2004, 37, 105–110. [Google Scholar] [CrossRef]
- Kirches, C.; Bock, H.G.; Schlöder, J.P.; Sager, S. Mixed-integer NMPC for predictive cruise control of heavy-duty trucks. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 4118–4123. [Google Scholar] [CrossRef]
- Hellström, E. Explicit use of road topography for model predictive cruise control in heavy trucks. Technology. 2005. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A20186&dswid=7919 (accessed on 7 January 2022).
- Johannesson, L.; Murgovski, N.; Jonasson, E.; Hellgren, J.; Egardt, B. Predictive energy management of hybrid long-haul trucks. Control Eng. Pract. 2015, 41, 83–97. [Google Scholar] [CrossRef]
- Borek, J.; Groelke, B.; Earnhardt, C.; Vermillion, C. Optimal Control of Heavy-duty Trucks in Urban Environments through Fused Model Predictive Control and Adaptive Cruise Control. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4602–4607. [Google Scholar] [CrossRef]
- Kock, P.; Gnatzig, S.; Passenberg, B.; Stursberg, O.; Ordys, A. Improved Cruise Control for Heavy Trucks using combined Heuristic and Predictive Control. In Proceedings of the IEEE International Conference on Control Applications, CCA 2008, San Antonio, TX, USA, 3–5 September 2008. [Google Scholar]
- Li, X.; Lyu, J.; Hong, J.; Zhao, J.; Gao, B.; Chen, H. MPC-Based Downshift Control of Automated Manual Transmissions. Automot. Innov. 2019, 2, 55–63. [Google Scholar] [CrossRef]
- Khodabakhshian, M.; Feng, L.; Börjesson, S.; Lindgärde, O.; Wikander, J. Reducing auxiliary energy consumption of heavy trucks by onboard prediction and real-time optimization. Appl. Energy 2017, 188, 652–671. [Google Scholar] [CrossRef]
- Groelke, B.; Borek, J.; Earnhardt, C.; Li, J.; Geyer, S.; Vermillion, C. A Comparative Assessment of Economic Model Predictive Control Strategies for Fuel Economy Optimization of Heavy-Duty Trucks. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 834–839. [Google Scholar] [CrossRef]
- Fries, M.; Kruttschnitt, M.; Lienkamp, M. Operational Strategy of Hybrid Heavy-Duty Trucks by Utilizing a Genetic Algorithm to Optimize the Fuel Economy Multiobjective Criteria. IEEE Trans. Ind. Appl. 2018, 54, 3668–3675. [Google Scholar] [CrossRef]
- Junell, J.; Tumer, K. Robust predictive cruise control for commercial vehicles. Int. J. Gen. Syst. 2013, 42, 776–792. [Google Scholar] [CrossRef]
- Borek, J.; Groelke, B.; Earnhardt, C.; Vermillion, C. Economic optimal control for minimizing fuel consumption of heavy-duty trucks in a highway environment. IEEE Trans. Control. Syst. Technol. 2020, 28, 1652–1664. [Google Scholar] [CrossRef]
- Xie, S.; Lang, K.; Qi, S. Aerodynamic-aware coordinated control of following speed and power distribution for hybrid electric trucks. Energy 2020, 209, 118496. [Google Scholar] [CrossRef]
- Khodabakhshian, M.; Feng, L.; Wikander, J. Predictive control of the engine cooling system for fuel efficiency improvement. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), New Taipei, Taiwan, 18–22 August 2014; pp. 61–66. [Google Scholar] [CrossRef]
- Zeng, Y.; Cai, Y.; Kou, G.; Gao, W.; Qin, D. Energy management for plug-in hybrid electric vehicle based on adaptive simplified ECMS. Sustainability 2018, 10, 2060. [Google Scholar] [CrossRef]
- Rezaei, A.; Burl, J.B.; Zhou, B.; Rezaei, M. A New Real-Time Optimal Energy Management Strategy for Parallel Hybrid Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2019, 27, 830–837. [Google Scholar] [CrossRef]
- Tian, X.; Cai, Y.; Sun, X.; Zhu, Z.; Xu, Y. An adaptive ECMS with driving style recognition for energy optimization of parallel hybrid electric buses. Energy 2019, 189, 116151. [Google Scholar] [CrossRef]
- Lithium-Ion 48V Battery. Version October 11. 2022. Available online: https://www.a123systems.com/automotive/products/systems/48v-battery/ (accessed on 7 January 2022).
- X15 Efficiency Series. 2020. Available online: https://www.cummins.com/engines/x15-efficiency-series (accessed on 21 April 2020).
- P2 Off-Axis Module for Hybrid Vehicles. BorgWarner P2 Off Axis Module. Available online: https://cdn.borgwarner.com/docs/default-source/default-document-library/p2-off-axis-module-for-hybrid-vehicles.pdf?sfvrsn=2ba5b43c_18 (accessed on 8 January 2022).
- Afzal, A.; Kaladgi, A.R.; Jilte, R.; Ibrahim, M.; Kumar, R.; Mujtaba, M.; Alshahrani, S.; Saleel, C.A. Thermal modelling, and characteristic evaluation of electric vehicle battery system. Case Stud. Therm. Eng. 2021, 26, 101058. [Google Scholar] [CrossRef]
- Chowdhury, S.; Leitzel, L.; Zima, M.; Santacesaria, M.; Lustbader, J.; Rugh, J.; Winkler, J.; Khawaja, A.; Govindarajalu, M. Total Thermal Management of Battery Electric Vehicles (BEVs). In Proceedings of the CO2 Reduction for Transportation Systems Conference; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Chang, W.Y. The State of Charge Estimating Methods for Battery: A Review. ISRN Appl. Math. 2013, 2013, 953792. [Google Scholar] [CrossRef]
- Zhang, M.; Fan, X. Review on the state of charge estimation methods for electric vehicle battery. World Electr. Veh. J. 2020, 11, 23. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.S.; Chen, Y.P.; Hsieh, Y.C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Endurant HD Automated Transmission. Available online: https://www.eatoncummins.com/us/en-us/catalog/transmissions/endurant.specifications.html (accessed on 22 April 2020).
- Pan, Y.; Theodorou, E. Probabilistic differential dynamic programming. Advances in Neural Information Processing Systems; Curran Associates, Inc., 2014; pp. 1907–1915. Available online: https://proceedings.neurips.cc/paper/2014/file/7fec306d1e665bc9c748b5d2b99a6e97-Paper.pdf (accessed on 8 January 2022).
- Larsson, V.; Johannesson, L.; Egardt, B. Cubic spline approximations of the dynamic programming cost-to-go HEV energy management problems. In Proceedings of the in 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 1699–1704. [Google Scholar]
- Romijin, C.; Donkers, T.; Weiland, S.; Kessels, J. Complex vehicle energy management with large horizon optimization. In Proceedings of the 34 Benelux Meeting on Systems & Controls, Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Smith, D.K. Dynamic Programming and Optimal Control. Volume 1. J. Oper. Res. Soc. 1996, 47, 833–834. [Google Scholar] [CrossRef]
- Bellman, R.E.; Dreyfus, S.E. Applied Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 2015. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear Type | Gear # | Gear Ratio |
|---|---|---|
| 1 | 14.43 | |
| 2 | 11.05 | |
| 3 | 8.44 | |
| 4 | 6.46 | |
| 5 | 4.95 | |
| Forward | 6 | 3.79 |
| 7 | 2.91 | |
| 8 | 2.23 | |
| 9 | 1.70 | |
| 10 | 1.3 | |
| 11 | 1 | |
| 12 | 0.776 | |
| 1 | 16.92 | |
| Reverse | 2 | 12.95 |
| Parameter | Symbol | Value |
|---|---|---|
| Vehicle mass | 49,895 | |
| Effective mass in cruise gear | 49,915 | |
| Wheel radius | ||
| Aerodynamic drag coefficient | ||
| Rolling resistance coefficient | ||
| Air density | ||
| Gravitational acceleration | g | |
| Engine maximum power |
| Metrics | Units | VS | ∆ |
|---|---|---|---|
| Fuel consumed | Kg | 26.4984 | −0.8 |
| Fuel economy | mpg | 9.86 | 3.02 |
| Trip time | s | 4602.8 | 0.07 |
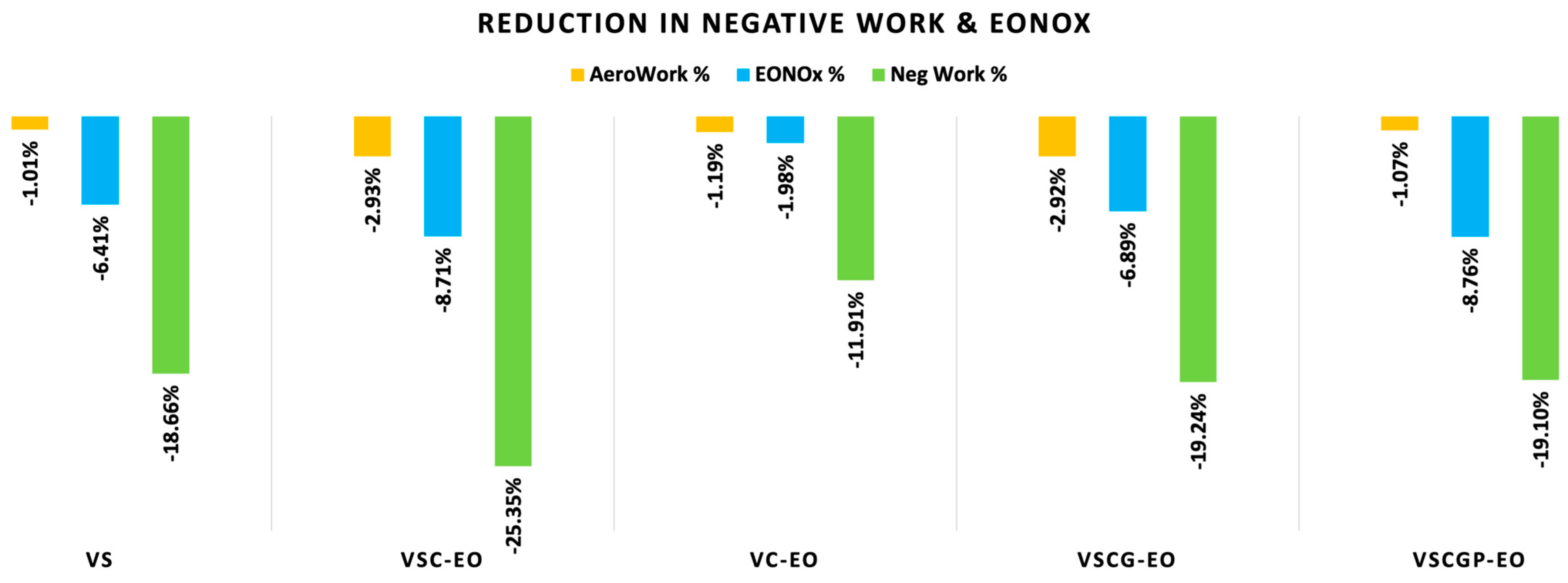
| Aerodynamic work | kWh | 89.26 | −1.01% |
| Cycle work | kW | 142.34 | −2.56% |
| BTE | % | 44.95 | 0.18% |
| Negative work | kWh | −24.1 | −18.66 |
| EONOx | Kg | 0.4104 | −6.41 |
| Metrics | Units | Case EI | ∆EI | Case EO | ∆EO |
|---|---|---|---|---|---|
| Fuel consumed | Kg | 27.03 | −0.26 | 26.92 | −0.37 |
| Fuel economy | mpg | 9.66 | 0.98% | 9.7 | 1.39% |
| Trip time | s | 4604.1 | 0.09% | 4602.6 | 0.06% |
| Aerodynamic work | kWh | 89.7 | −0.52% | 89.1 | −1.19% |
| Cycle work | kW | 144.97 | −0.76% | 144.76 | −0.91% |
| BTE | % | 44.87 | 0.09 | 44.99 | 0.21 |
| Negative work | kWh | −27.21 | −8.17% | −26.1 | −11.91% |
| EONOx | Kg | 0.4304 | −1.82% | 0.4297 | −1.98% |
| Metrics | Units | Case EI | ∆EI | Case EO | ∆EO |
|---|---|---|---|---|---|
| Fuel consumed | Kg | 26.3345 | −0.96 | 26.14 | −1.15 |
| Fuel economy | mpg | 9.92 | 3.64% | 9.99 | 4.41% |
| Trip time | s | 4604.2 | 0.1% | 4603.7 | 0.08% |
| Aerodynamic work | kWh | 87.52 | −2.94% | 87.53 | −2.93% |
| Cycle work | kW | 141.92 | −2.85% | 140.25 | −3.99% |
| BTE | % | 45.09 | 0.31 | 44.89 | 0.11 |
| Negative work | kWh | −21.76 | −26.56% | −22.12 | −25.35% |
| EONOx | Kg | 0.4021 | -8.28% | 0.4002 | −8.71 |
| Metrics | Units | Case EI | ∆EI | Case EO | ∆EO |
|---|---|---|---|---|---|
| Fuel consumed | Kg | 26.34 | −0.95 | 26.1 | −1.19 |
| Fuel economy | mpg | 9.92 | 3.62% | 10.01 | 4.57% |
| Trip time | S | 4597.3 | −0.05% | 4605.3 | 0.12% |
| Aerodynamic work | kWh | 90.29 | 0.13% | 87.54 | −2.92% |
| Cycle work | kW | 142.021 | −2.78% | 140.218 | −4.02% |
| BTE | % | 45.11 | 0.33 | 44.94 | 0.17 |
| Negative work | kWh | −22.3 | −24.74% | −23.93 | −19.24% |
| EONOx | Kg | 0.41 | −6.48% | 0.4082 | −6.89 |
| Metrics | Units | Case EI | ∆EI | Case EO | ∆EO |
|---|---|---|---|---|---|
| Fuel consumed | Kg | 26.34 | −0.95 | 25.995 | −1.30 |
| Fuel economy | mpg | 9.92 | 3.63% | 10.05 | 5.00% |
| Trip time | s | 4597.2 | −0.06% | 4601.5 | 0.04% |
| Aerodynamic work | kWh | 90.298 | 0.14% | 89.21 | −1.07% |
| Cycle work | kW | 141.89 | −2.87% | 141.67 | −3.02% |
| BTE | % | 45.07 | 0.29 | 45.59 | 0.82 |
| Negative work | kWh | −22.78 | −23.12% | −23.97 | −19.1% |
| EONOx | Kg | 0.4 | −8.76% | 0.4023 | −8.23 |
| Route Section | FE | Trip Time | Full Route FE | Full Route TT | Coast Events |
|---|---|---|---|---|---|
| 1st 40 miles 2nd 40 miles Hilly 10 mile | 2.41 2.39 0.053 | −0.05 0.02 −0.86 | 5.00 | 0.04 | Decreased Increased None |
| Flat 10 mile | 1.03 | 0.27 | Regular |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pramanik, S.; Anwar, S. Predictive Optimal Control of Mild Hybrid Trucks. Vehicles 2022, 4, 1344-1364. https://doi.org/10.3390/vehicles4040071
Pramanik S, Anwar S. Predictive Optimal Control of Mild Hybrid Trucks. Vehicles. 2022; 4(4):1344-1364. https://doi.org/10.3390/vehicles4040071
Chicago/Turabian StylePramanik, Sourav, and Sohel Anwar. 2022. "Predictive Optimal Control of Mild Hybrid Trucks" Vehicles 4, no. 4: 1344-1364. https://doi.org/10.3390/vehicles4040071
APA StylePramanik, S., & Anwar, S. (2022). Predictive Optimal Control of Mild Hybrid Trucks. Vehicles, 4(4), 1344-1364. https://doi.org/10.3390/vehicles4040071