
A Survey on Mobile Road Side Units in VANETs



Abstract
:1. Introduction
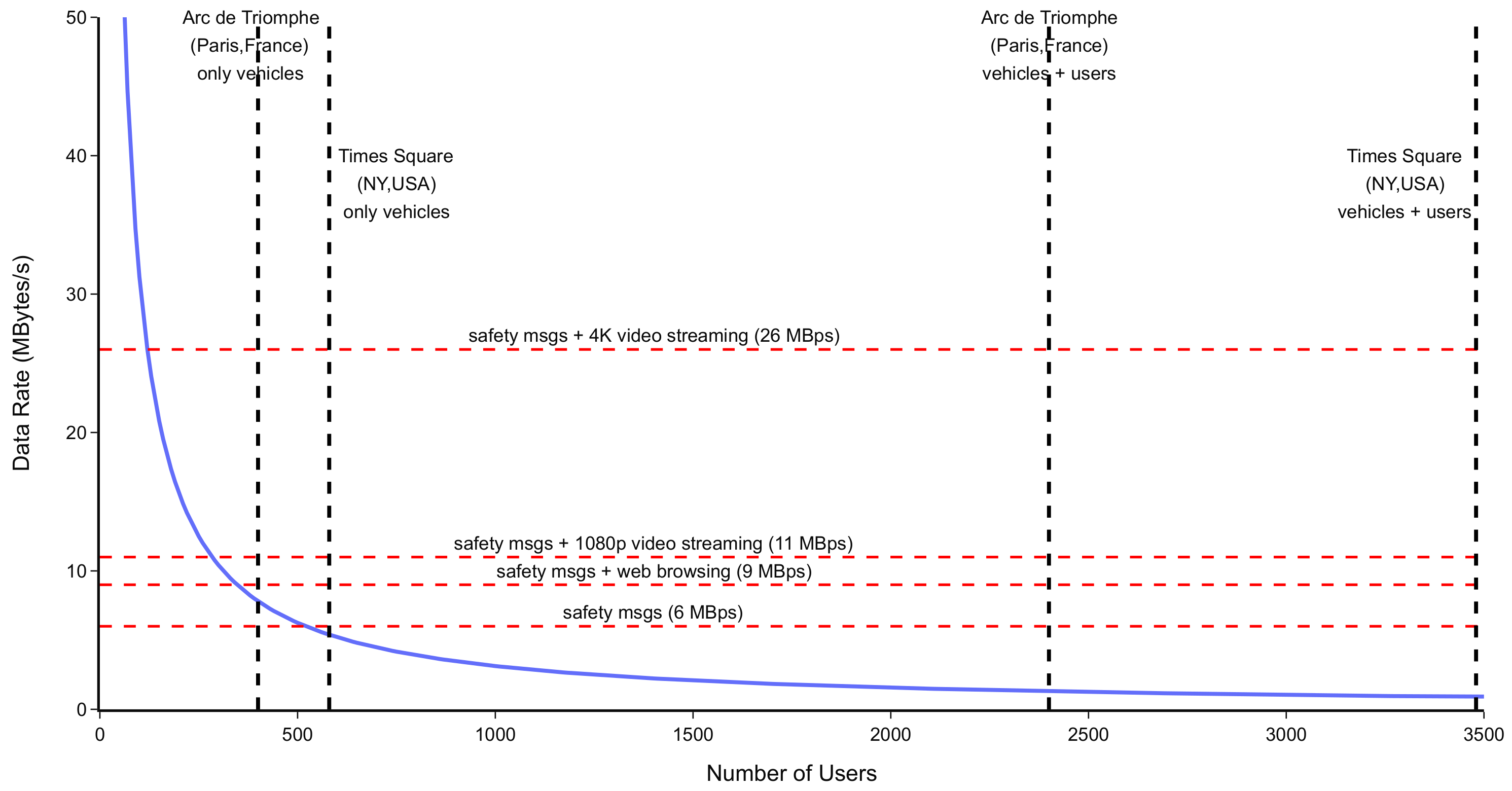
- We analyze the importance of a RSU for the VANET with real-world data analytics incorporating new 5G standards.
- We exploit the research done in the area of mRSU.
- Finally, we discuss future research areas of mRSU and their challenges.
2. Related Work
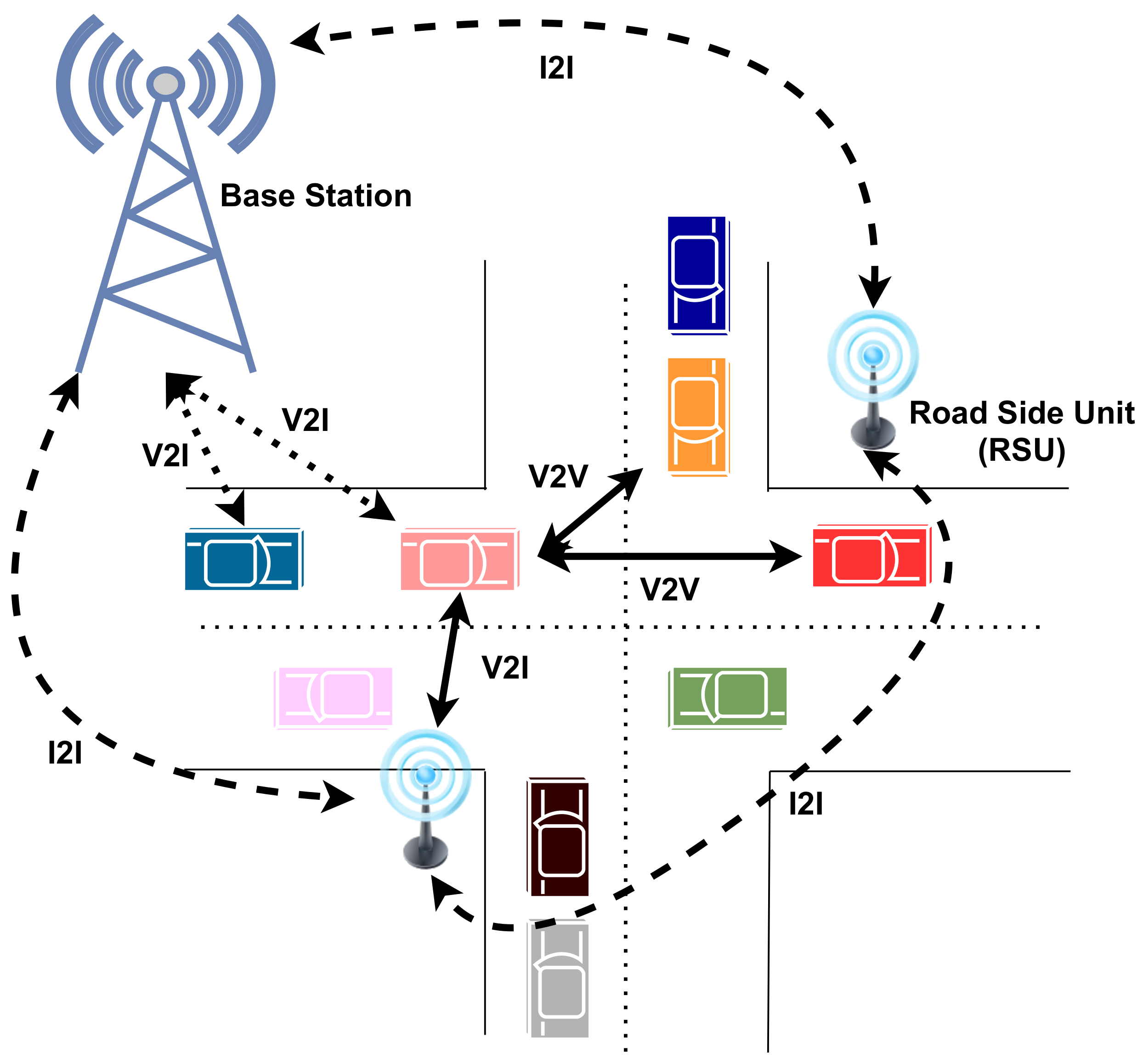
3. Vehicular Networks Architecture
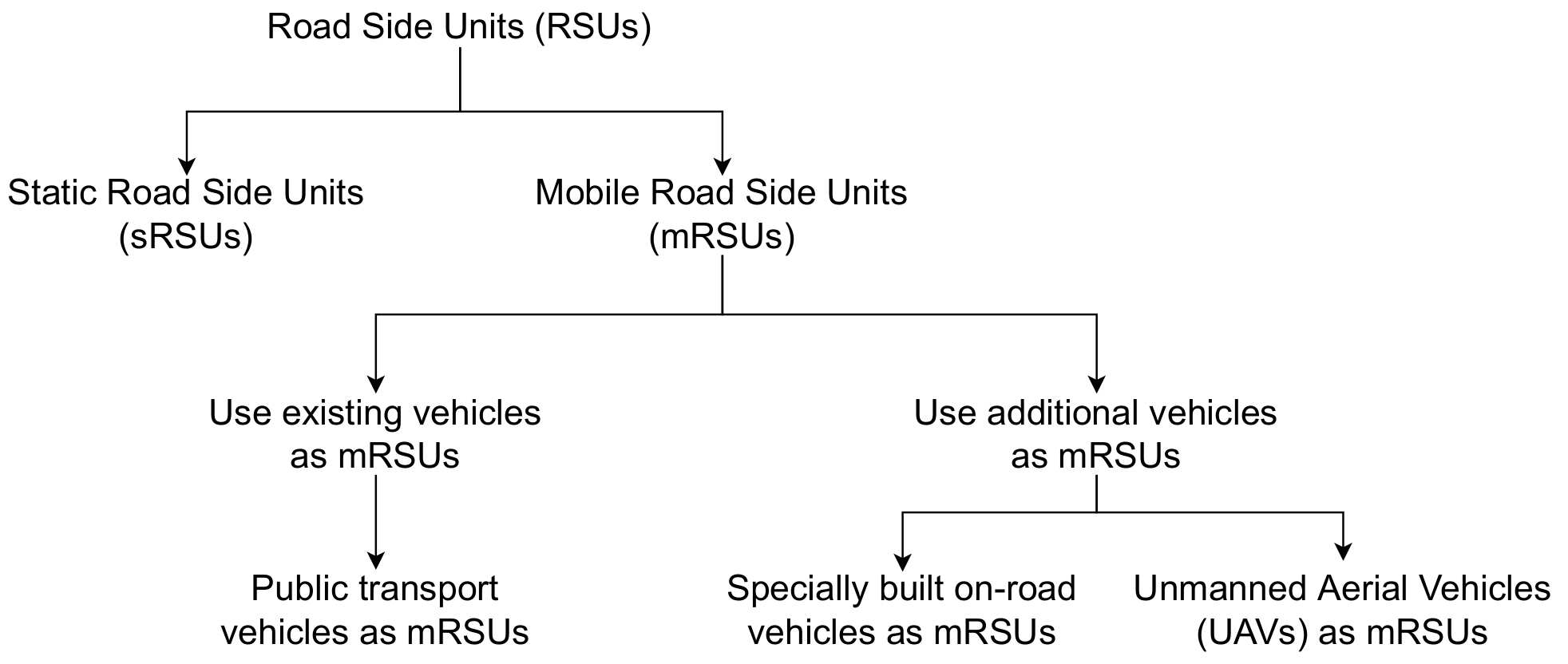
3.1. RSU Deployment Strategies
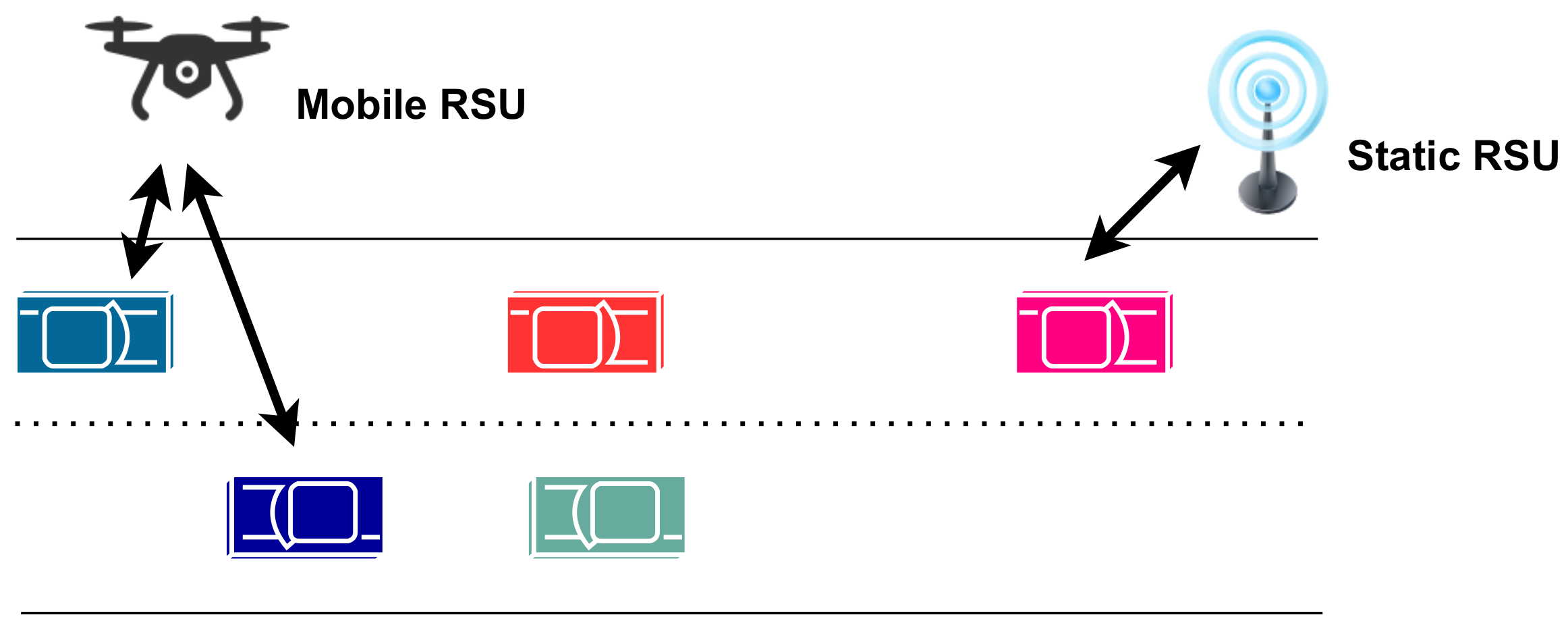
3.1.1. Static RSU
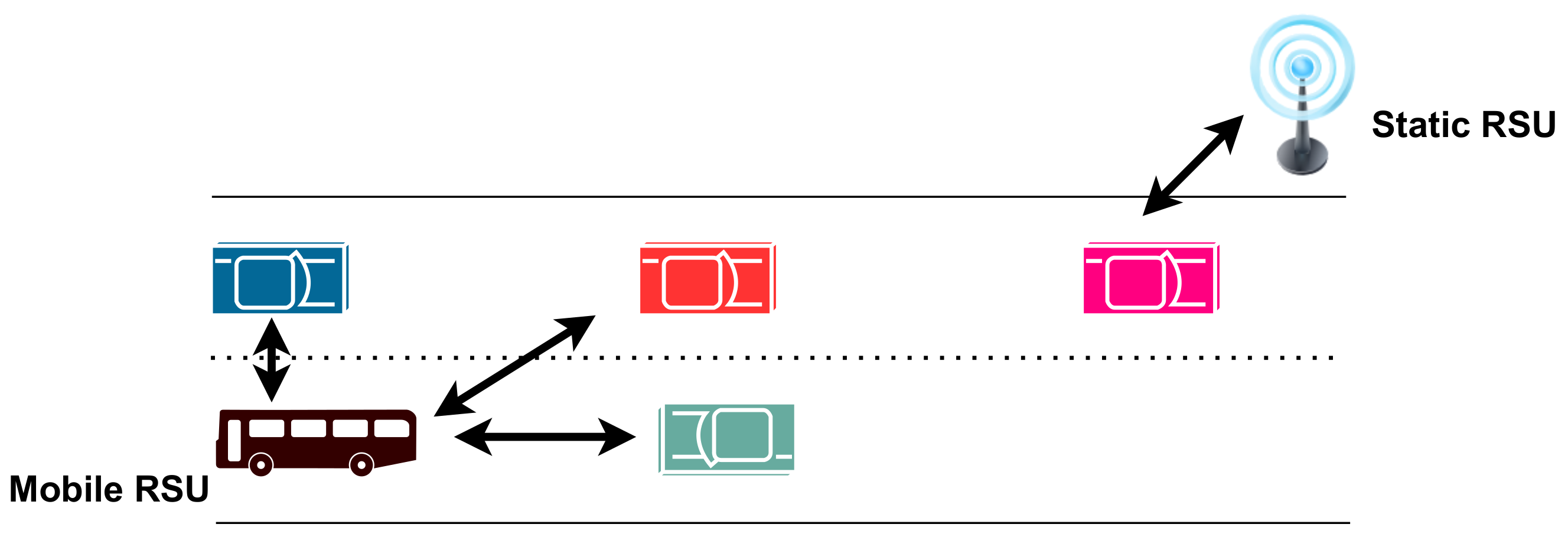
3.1.2. Mobile RSU
4. The Role of the Road Side Unit
5. Mobile RSU Deployment Strategies
- Use existing vehicles as mRSUs;
- Use additional vehicles as mRSUs.
5.1. Using Existing Vehicles as mRSUs
5.2. Using Additional Vehicles as mRSUs
- Dedicated on-road vehicles as mRSUs;
- Unmanned Aerial Vehicles (UAVs) as mRSUs.
5.2.1. Dedicated On-Road Vehicles as mRSUs
5.2.2. Unmanned Aerial Vehicles (UAVs) as mRSUs
6. Future Trends and Challenges
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carbon Pricing on the Horizon. Available online: https://www.oebu.ch (accessed on 7 October 2021).
- Aoki, S.; Lin, C.W.; Rajkumar, R. Human-Robot Cooperation for Autonomous Vehicles and Human Drivers: Challenges and Solutions. IEEE Commun. Mag. 2021, 59, 35–41. [Google Scholar] [CrossRef]
- Quessada, M.S.; Pereira, R.S.; Revejes, W.; Sartori, B.; Gottsfritz, E.N.; Lieira, D.D.; da Silva, M.A.; Rocha Filho, G.P.; Meneguette, R.I. ITSMEI: An intelligent transport system for monitoring traffic and event information. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720963751. [Google Scholar] [CrossRef]
- Meneguette, R.I.; Filho, G.P.R.; Guidoni, D.L.; Pessin, G.; Villas, L.A.; Ueyama, J. Increasing Intelligence in Inter-Vehicle Communications to Reduce Traffic Congestions: Experiments in Urban and Highway Environments. PLoS ONE 2016, 11, e0159110. [Google Scholar] [CrossRef] [PubMed]
- Brennand, C.A.R.L.; Filho, G.P.R.; Maia, G.; Cunha, F.; Guidoni, D.L.; Villas, L.A. Towards a Fog-Enabled Intelligent Transportation System to Reduce Traffic Jam. Sensors 2019, 19, 3916. [Google Scholar] [CrossRef] [Green Version]
- Aoki, S. Towards Cooperative and Energy-Efficient Connected and Automated Vehicles. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2020. [Google Scholar]
- Zongo, M.; Nlong, J.M., II; Ndoundam, R.; Foerster, A. DSRC Applicability in Cameroon Road Traffic: A Simulation Study. EAI Endorsed Trans. Mob. Commun. Appl. 2021, 6, e1. [Google Scholar] [CrossRef]
- Ansari, S.; Sánchez, M.; Boutaleb, T.; Sinanovic, S.; Gamio, C.; Krikidis, I. SAI: Safety Application Identifier Algorithm at MAC Layer for Vehicular Safety Message Dissemination over LTE VANET Networks. Wirel. Commun. Mob. Comput. 2018, 2018, e6576287. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Li, X.; Zhao, X.; Zhang, M.H.; Wang, Z. DSRC versus 4G-LTE for Connected Vehicle Applications: A Study on Field Experiments of Vehicular Communication Performance. J. Adv. Transp. 2017, 2017, e2750452. [Google Scholar] [CrossRef] [Green Version]
- Wright, J.; Garrett, J.K.; Hill, C.J.; Krueger, G.D.; Evans, J.H.; Andrews, S.; Wilson, C.K.; Rajbhandari, R.; Burkhard, B.; American Association of State Highway and Transportation Officials. National Connected Vehicle Field Infrastructure Footprint Analysis; Technical Report FHWA-JPO-14-125; Department of Transportation, Intelligent Transportation Systems Joint Program Office: Washington, DC, USA, 2014.
- Silva, C.M.; Masini, B.M.; Ferrari, G.; Thibault, I. A Survey on Infrastructure-Based Vehicular Networks. Mob. Inf. Syst. 2017, 2017, e6123868. [Google Scholar] [CrossRef] [Green Version]
- Bilal, S.M.; Bernardos, C.J.; Guerrero, C. Position-based routing in vehicular networks: A survey. J. Netw. Comput. Appl. 2013, 36, 685–697. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ban, N.T.; Han, N.D. Communication Solutions for Vehicle Ad-hoc Network in Smart Cities Environment: A Comprehensive Survey. Wirel. Pers. Commun. 2021, 122, 2791–2815. [Google Scholar] [CrossRef]
- Saleh, H.H.; Hasson, S.T. A Survey of Routing Algorithms in Vehicular Networks. In Proceedings of the 2019 International Conference on Advanced Science and Engineering (ICOASE), Duhok, Iraq, 2–4 April 2019; pp. 159–164. [Google Scholar] [CrossRef]
- Singh, S.; Agrawal, S. VANET routing protocols: Issues and challenges. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, 6–8 March 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. A Survey on Cluster-Based Routing Protocols for Unmanned Aerial Vehicle Networks. IEEE Access 2019, 7, 498–516. [Google Scholar] [CrossRef]
- Lee, M.; Atkison, T. VANET applications: Past, present, and future. Veh. Commun. 2021, 28, 100310. [Google Scholar] [CrossRef]
- Ghazi, M.U.; Khan Khattak, M.A.; Shabir, B.; Malik, A.W.; Sher Ramzan, M. Emergency Message Dissemination in Vehicular Networks: A Review. IEEE Access 2020, 8, 38606–38621. [Google Scholar] [CrossRef]
- Standards, E. ETSI EN 302 665 V1.1.1. Available online: https://www.en-standard.eu (accessed on 15 May 2021).
- Lochert, C.; Scheuermann, B.; Wewetzer, C.; Luebke, A.; Mauve, M. Data aggregation and roadside unit placement for a vanet traffic information system. In Proceedings of the Fifth ACM International Workshop on Vehicular Inter-NETworking, VANET’08, San Francisco, CA, USA, 15 September 2008; Association for Computing Machinery: New York, NY, USA, 2008; pp. 58–65. [Google Scholar] [CrossRef]
- Cavalcante, E.S.; Aquino, A.L.; Pappa, G.L.; Loureiro, A.A. Roadside unit deployment for information dissemination in a VANET: An evolutionary approach. In Proceedings of the 14th Annual Conference Companion on Genetic and Evolutionary Computation, GECCO’12, Philadelphia, PA, USA, 7–11 July 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 27–34. [Google Scholar] [CrossRef]
- Liu, G.; Huang, Y.; Chen, Z.; Liu, L.; Wang, Q.; Li, N. 5G Deployment: Standalone vs. Non-Standalone from the Operator Perspective. IEEE Commun. Mag. 2020, 58, 83–89. [Google Scholar] [CrossRef]
- Aldubaikhy, K.; Wu, W.; Zhang, N.; Cheng, N.; Shen, X. mmWave IEEE 802.11ay for 5G Fixed Wireless Access. IEEE Wirel. Commun. 2020, 27, 88–95. [Google Scholar] [CrossRef]
- Polese, M.; Giordani, M.; Zugno, T.; Roy, A.; Goyal, S.; Castor, D.; Zorzi, M. Integrated Access and Backhaul in 5G mmWave Networks: Potential and Challenges. IEEE Commun. Mag. 2020, 58, 62–68. [Google Scholar] [CrossRef]
- Newtec. Choosing the Right Connectivity for 5G-ST Engineering iDirect (Europe). Available online: https://www.newtec.eu/article/article/choosing-the-right-connectivity-for-5g (accessed on 10 October 2021).
- Jiang, D.; Chen, Q.; Delgrossi, L. Optimal data rate selection for vehicle safety communications. In Proceedings of the Fifth ACM International Workshop on VehiculAr Inter-NETworking, VANET’08, San Francisco, CA, USA, 15 September 2008; Association for Computing Machinery: New York, NY, USA, 2008; pp. 30–38. [Google Scholar] [CrossRef]
- How Much Internet Speed Do You Need? Data Speeds Deciphered! Available online: https://leapfrogservices.com/how-much-internet-speed-do-you-need-data-speeds-deciphered/ (accessed on 25 October 2021).
- How Much Speed Do I Need to Stream Video? Available online: https://www.highspeedinternet.com/resources/how-much-speed-do-i-need-to-watch-netflix-and-hulu (accessed on 10 October 2021).
- STUDY: Average Car Size Is Increasing—Will Roads Still Be Safe for Small Cars and Pedestrians? Available online: https://www.thezebra.com/resources/driving/average-car-size/ (accessed on 5 November 2021).
- Luo, J.; Gu, X.; Zhao, T.; Yan, W. A Mobile Infrastructure Based VANET Routing Protocol in the Urban Environment. In Proceedings of the 2010 International Conference on Communications and Mobile Computing, Shenzhen, China, 12–14 April 2010; Volume 3, pp. 432–437. [Google Scholar] [CrossRef]
- Chaib, N.; Oubbati, O.S.; Bensaad, M.L.; Lakas, A.; Lorenz, P.; Jamalipour, A. BRT: Bus-Based Routing Technique in Urban Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4550–4562. [Google Scholar] [CrossRef]
- Li, G.; Ma, M.; Liu, C.; Shu, Y. Routing in taxi and public transport based heterogeneous vehicular networks. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 1863–1866. [Google Scholar] [CrossRef]
- Lan, K.c.; Wu, Z.M. On the feasibility of using public transport as data mules for traffic monitoring. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 979–984. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuang, Y.; Pan, J.; Kaur, L.; Zhu, H. Multi-modal message dissemination in vehicular ad-hoc networks. In Proceedings of the 2012 1st IEEE International Conference on Communications in China (ICCC), Beijing, China, 15–17 August 2012; pp. 670–675. [Google Scholar] [CrossRef]
- Lee, J.; Ahn, S. Adaptive Configuration of Mobile Roadside Units for the Cost-Effective Vehicular Communication Infrastructure. Wirel. Commun. Mob. Comput. 2019, 2019, e6594084. [Google Scholar] [CrossRef]
- Heo, J.; Kang, B.; Yang, J.M.; Paek, J.; Bahk, S. Performance-Cost Tradeoff of Using Mobile Roadside Units for V2X Communication. IEEE Trans. Veh. Technol. 2019, 68, 9049–9059. [Google Scholar] [CrossRef]
- Mobile-Gateway Routing for Vehicular Networks. Available online: https://www.academia.edu (accessed on 12 October 2021).
- Akhavan Bitaghsir, S.; Kashipazha, S.; Dadlani, A.; Khonsari, A. Social-Aware Mobile Road Side Unit for Content Distribution in Vehicular Social Networks. In Proceedings of the 2019 IEEE Symposium on Computers and Communications (ISCC), Barcelona, Spain, 29 June–3 July 2019. [Google Scholar] [CrossRef]
- Bouachir, O.; Aloqaily, M.; Ridhawi, I.A.; Alfandi, O.; Salameh, H.B. UAV-Assisted Vehicular Communication for Densely Crowded Environments. In Proceedings of the NOMS 2020—2020 IEEE/IFIP Network Operations and Management Symposium, Budapest, Hungary, 20–24 April 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Fatemidokht, H.; Rafsanjani, M.K.; Gupta, B.B.; Hsu, C.H. Efficient and Secure Routing Protocol Based on Artificial Intelligence Algorithms with UAV-Assisted for Vehicular Ad Hoc Networks in Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4757–4769. [Google Scholar] [CrossRef]
- Seliem, H.; Ahmed, M.H.; Shahidi, R.; Shehata, M.S. Delay analysis for drone-based vehicular Ad-Hoc Networks. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Su, Y.; LiWang, M.; Hosseinalipour, S.; Huang, L.; Dai, H. Optimal Position Planning of UAV Relays in UAV-Assisted Vehicular Networks. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Baz, A.; Alhakami, H.; Ben-Othman, J. Dispatch of UAVs for Urban Vehicular Networks: A Deep Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2021, 70, 13174–13189. [Google Scholar] [CrossRef]
- Samir, M.; Sharafeddine, S.; Assi, C.; Nguyen, T.M.; Ghrayeb, A. Trajectory Planning and Resource Allocation of Multiple UAVs for Data Delivery in Vehicular Networks. IEEE Netw. Lett. 2019, 1, 107–110. [Google Scholar] [CrossRef]
- Samir, M.; Chraiti, M.; Assi, C.; Ghrayeb, A. Joint Optimization of UAV Trajectory and Radio Resource Allocation for Drive-Thru Vehicular Networks. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhou, Y.; Cheng, N.; Lu, N.; Shen, X.S. Multi-UAV-Aided Networks: Aerial-Ground Cooperative Vehicular Networking Architecture. IEEE Veh. Technol. Mag. 2015, 10, 36–44. [Google Scholar] [CrossRef]
- Khabbaz, M.; Antoun, J.; Assi, C. Modeling and Performance Analysis of UAV-Assisted Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 8384–8396. [Google Scholar] [CrossRef]
- Raza, A.; Bukhari, S.H.R.; Aadil, F.; Iqbal, Z. An UAV-assisted VANET architecture for intelligent transportation system in smart cities. Int. J. Distrib. Sens. Netw. 2021, 17, 15501477211031750. [Google Scholar] [CrossRef]
- Fan, X.; Liu, D.; Fu, B.; Wen, S. Optimal relay selection for UAV-assisted V2V communications. Wirel. Netw. 2021, 27, 3233–3249. [Google Scholar] [CrossRef]
- Qu, G.; Zhang, S.; Zhou, J.; Tian, D.; Sheng, Z.; Ran, X.; Li, L.; Guo, S. Transmission Power Optimization for an Air-Ground Cooperative Vehicular Network. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 151–156. [Google Scholar] [CrossRef]
- Wu, H.; Lyu, F.; Zhou, C.; Chen, J.; Wang, L.; Shen, X. Optimal UAV Caching and Trajectory in Aerial-Assisted Vehicular Networks: A Learning-Based Approach. IEEE J. Sel. Areas Commun. 2020, 38, 2783–2797. [Google Scholar] [CrossRef]
- Su, Z.; Dai, M.; Xu, Q.; Li, R.; Zhang, H. UAV Enabled Content Distribution for Internet of Connected Vehicles in 5G Heterogeneous Networks. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5091–5102. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Meneguette, R.; De Grande, R.; Ueyama, J.; Filho, G.P.R.; Madeira, E. Vehicular Edge Computing: Architecture, Resource Management, Security, and Challenges. ACM Comput. Surv. 2021, 55, 1–46. [Google Scholar] [CrossRef]
- Frost & Sullivan Presents the Evolving Urban Air Mobility Landscape up to 2040. Available online: https://www.frost.com/news/press-releases/frost-sullivan-presents-the-evolving-urban-air-mobility-landscape-up-to-2040/ (accessed on 5 November 2021).
- Are Flying Cars Preparing for Takeoff? Available online: https://www.morganstanley.com/ideas/autonomous-aircraft (accessed on 5 November 2021).
- Lai, C.; Lu, R.; Zheng, D.; Shen, X. Security and Privacy Challenges in 5G-Enabled Vehicular Networks. IEEE Netw. 2020, 34, 37–45. [Google Scholar] [CrossRef]
- Talpur, A.; Gurusamy, M. Machine Learning for Security in Vehicular Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutorials 2022, 24, 346–379. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Use Existing Vehicles as mRSU | Use Additional Vehicles as mRSU | |
|---|---|---|
| Cost of vehicles | Low (Only communication equipment is required) | High (Vehicle and communication equipment are required) |
| Cost of deploying | Low | High (Additional drivers needed) |
| Adaptability to current traffic condition | No | Yes |
| Pre-determined travelling routes | Yes | No |
| Ability to cover both urban and rural areas | Low | High |
| Deployment speed in case of need | Low | High |
| Ability to stop at a location and serve | No | Yes |
| Possibility of increasing the number of mRSU as desired | No | Yes |
| Level of coordination among mRSUs | Low | Medium to High |
| Impact on traffic congestion by adding | N/A | High |
| Dedicated On-Road Vehicles as mRSU | UAVs as mRSU | |
|---|---|---|
| Vehicle types | Any on-road vehicle | Fixed-wing and Rotary-wing UAVs |
| Cost of vehicles | High | Medium |
| Power consumption issues | No | Yes |
| Privacy concerns (etc spying) | Low | High |
| Fixed to road infrastructure | Yes | No |
| Impact on traffic congestion by adding | High | N/A (Flying above) |
| Line of sight communication to vehicles | Rarely | Yes |
| Speed of vehicles | Similar to other vehicles | Faster than on-road vehicles |
| Deployment speed in case of need | Medium | High |
| Communication range | Long | Depend on the deployed height |
| Prone to whether conditions | No | Yes |
| Level of coordination among mRSUs | Medium | High |
| Reference | Public Transport Vehicles as mRSUs | Use Additional Vehicles as mRSUs | |
|---|---|---|---|
| Specially Built On-Road Vehicles as mRSUs | Unmanned Aerial Vehicles as mRSUs | ||
| Luo et al. [31] | ✓ | ||
| Chaib et al. [32] | ✓ | ||
| Li et al. [33] | ✓ | ||
| Lan et al. [34] | ✓ | ||
| Zhang et al. [35] | ✓ | ||
| Lee et al. [36] | ✓ | ||
| Heo et al. [37] | ✓ | ||
| Huei-Ru et al. [38] | ✓ | ||
| Akhavan et al. [39] | ✓ | ||
| Bouachir et al. [40] | ✓ | ||
| Fatemidokht et al. [41] | ✓ | ||
| Seliem et al. [42] | ✓ | ||
| Su et al. [43] | ✓ | ||
| Oubbati et al. [44] | ✓ | ||
| Samir et al. [45] | ✓ | ||
| Samir et al. [46] | ✓ | ||
| Zhou et al. [47] | ✓ | ||
| Khabbaz et al. [48] | ✓ | ||
| Raza et al. [49] | ✓ | ||
| Fan et al. [50] | ✓ | ||
| Qu et al. [51] | ✓ | ||
| Wu et al. [52] | ✓ | ||
| Su et al. [53] | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karunathilake, T.; Förster, A. A Survey on Mobile Road Side Units in VANETs. Vehicles 2022, 4, 482-500. https://doi.org/10.3390/vehicles4020029
Karunathilake T, Förster A. A Survey on Mobile Road Side Units in VANETs. Vehicles. 2022; 4(2):482-500. https://doi.org/10.3390/vehicles4020029
Chicago/Turabian StyleKarunathilake, Thenuka, and Anna Förster. 2022. "A Survey on Mobile Road Side Units in VANETs" Vehicles 4, no. 2: 482-500. https://doi.org/10.3390/vehicles4020029
APA StyleKarunathilake, T., & Förster, A. (2022). A Survey on Mobile Road Side Units in VANETs. Vehicles, 4(2), 482-500. https://doi.org/10.3390/vehicles4020029