Predictive Maintenance of Bus Fleet by Intelligent Smart Electronic Board Implementing Artificial Intelligence



Abstract

1. Introduction
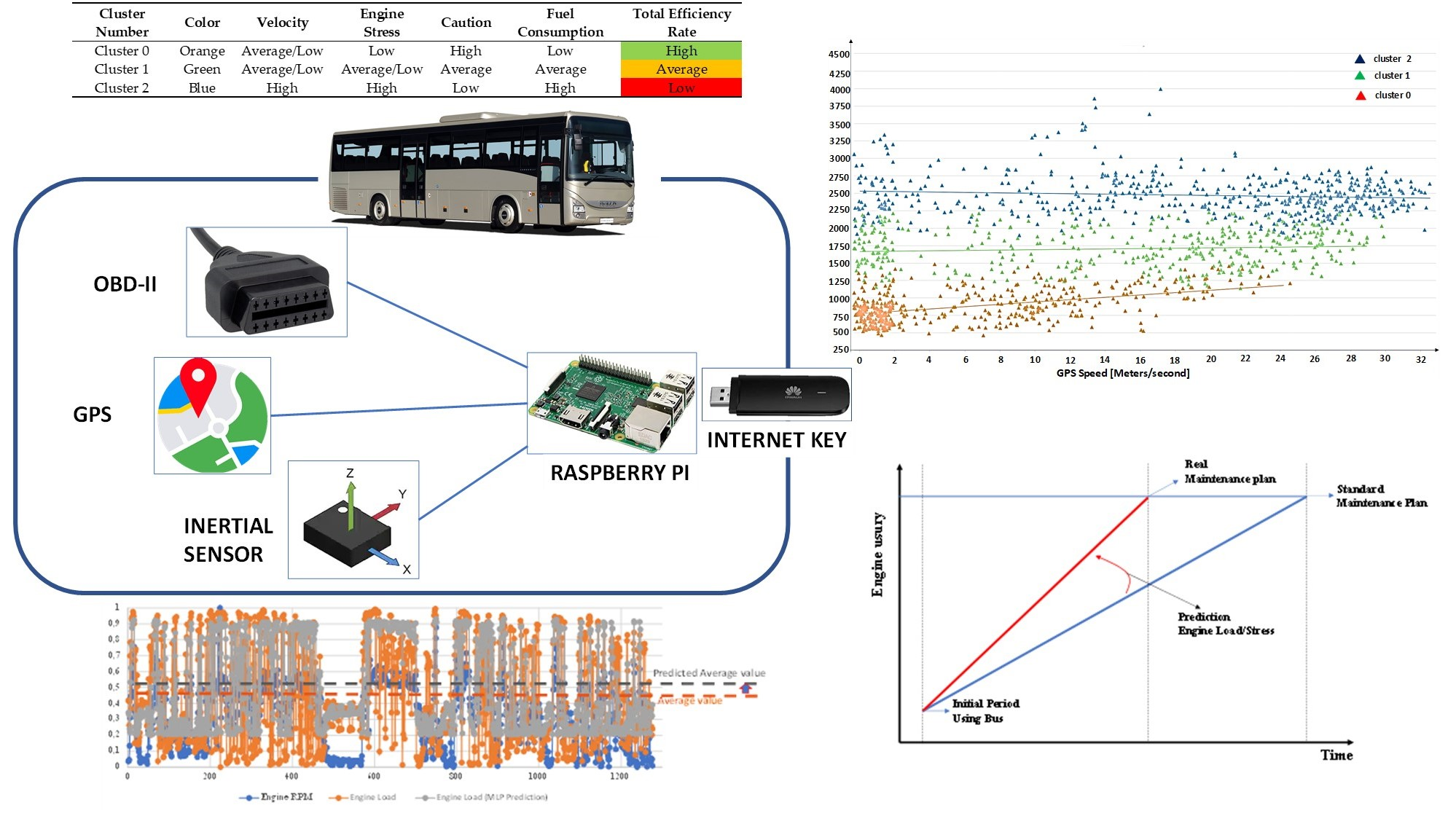
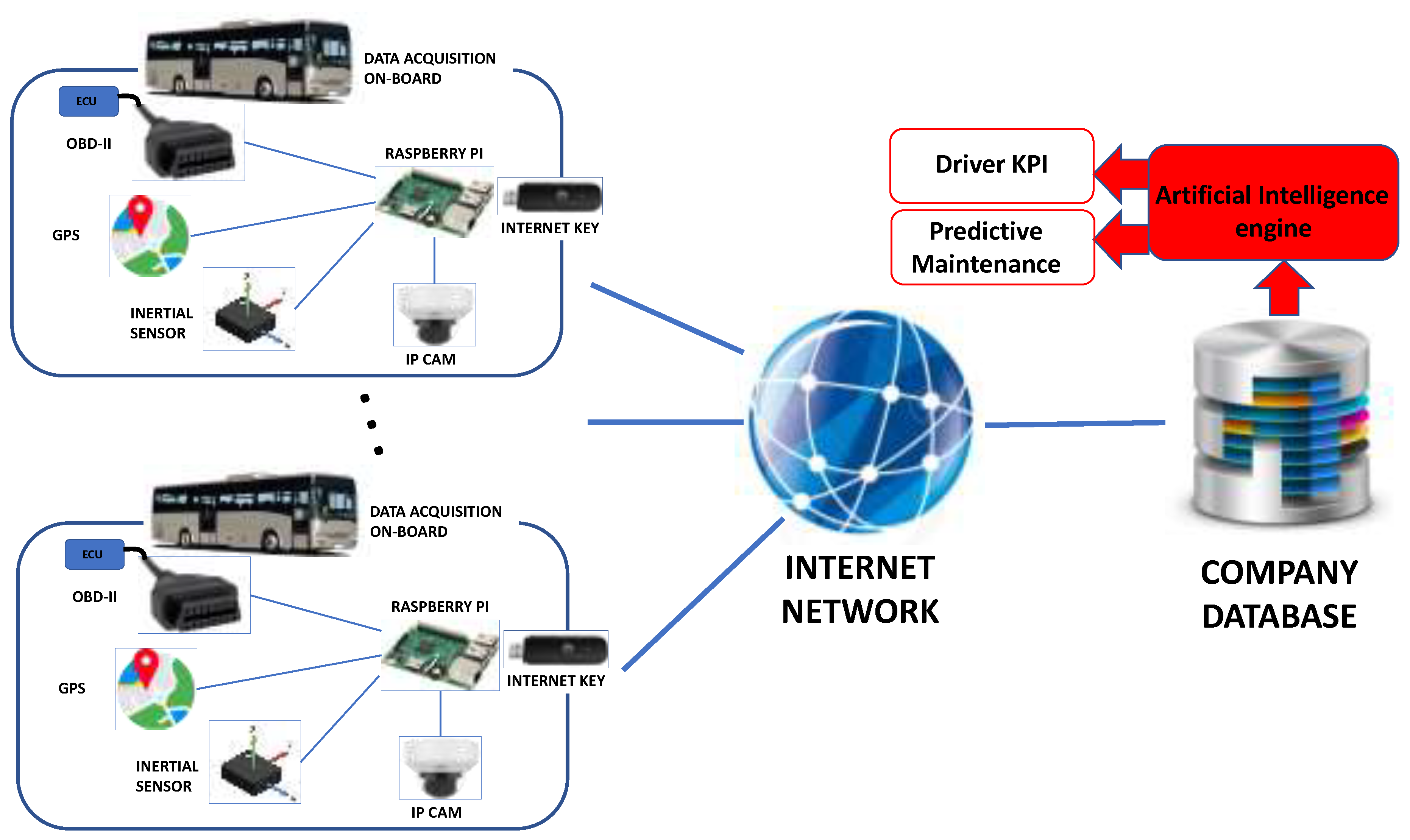
- the use of data acquisition interfaces (electronic interfaces) implementing on-board diagnostics II (OBD-II) communication standard diagnostics II (OBD-II) communication standard (the data are extracted from the control units by means of scheduled procedures);
- the use of a central database (MySQL) for the collection of data, which are processed by data mining and artificial intelligence algorithms (e.g., clustering, artificial neural networks), supporting the formulation of the fleet maintenance plan, based on wear prediction deriving from the analysis of vehicle data such as revolutions per minute (RPM), accelerations (throttle position), stops, refueling, fuel consumed, inconsistencies between loaded values and actually consumed volumes, etc.;
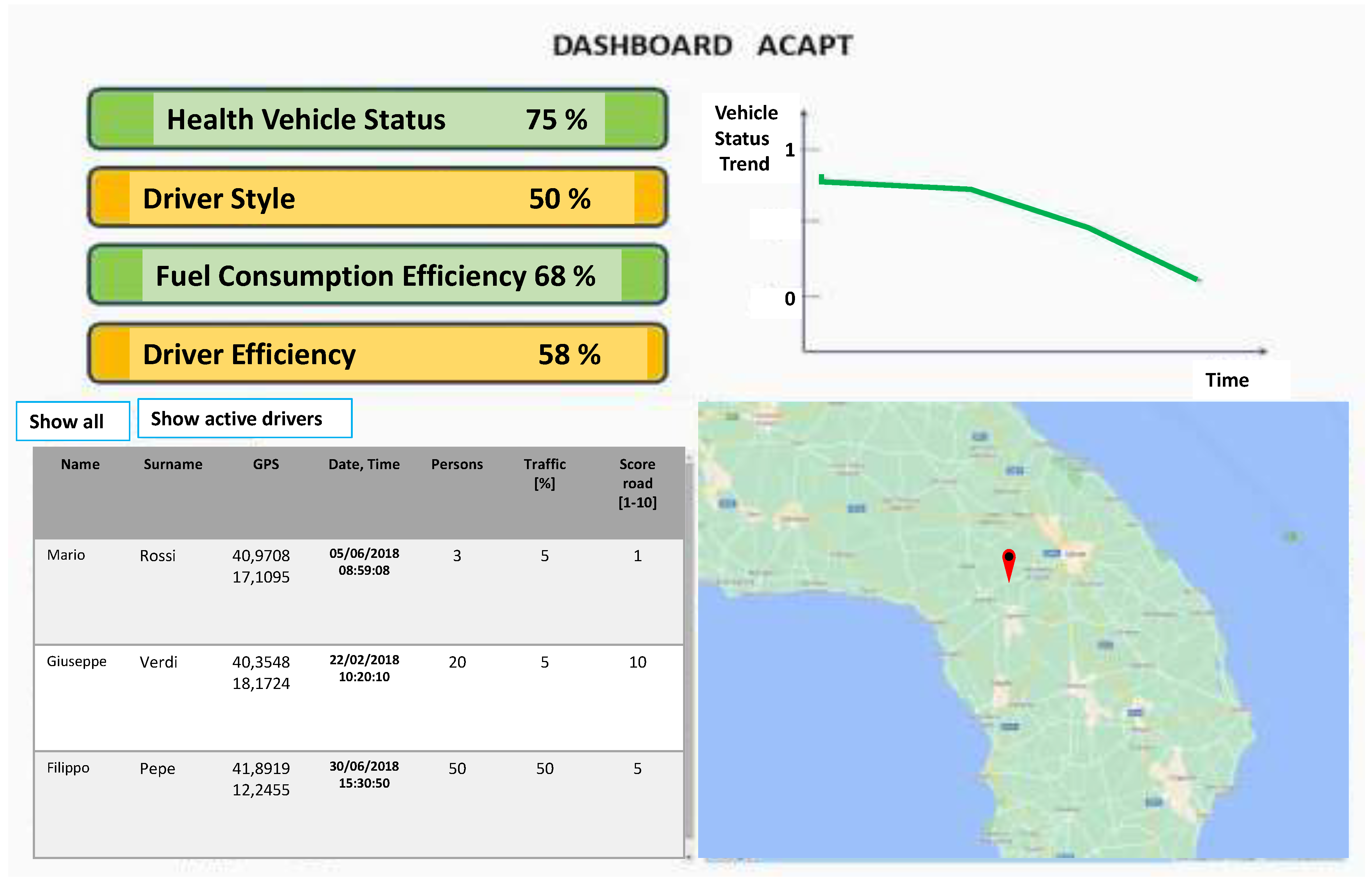
- the creation of dashboards indicating the wear levels of the single bus, and the predictive scheduling of the maintenance plan based on the outputs of the artificial intelligence algorithms;
- a camera module: two night vision cameras are mounted on each vehicle (front and rear view) for video streaming and for recording. The cameras, in addition to the linking of the GPS signal, can be also used to verify the driving style of the driver, and to analyze the status of the itineraries that could influence the vehicle wear for a long time period (intense traffic conditions, roads with potholes, etc.);
- a GPS monitoring module allowing the tracking of all the movements and activities of each vehicle and to monitor any inefficiencies (for example excessive consumption due to an inappropriate driving style, risky driving styles due to speed limits not respected, etc.). GPS data can be processed by the data mining engine for the definition of the driver’s reliability and efficiency indices, for the mapping of the activities of each individual vehicle, and for the support in predicting maintenance procedures.
- Multilayer perceptron (MLP) artificial neural network (ANN) model providing prediction about vehicle wear;
- k-means algorithm able to provide driver clusters indicating the correct and inappropriate behaviors.
- Bus protocol description;
- Software design and data modelling;
- Preliminary testing of electronic components;
- Testing of the artificial neural network (estimation of the calculus error);
- Testing of the MLP-ANN algorithm;
- Testing of the k-means algorithm;
- Key performance indicator (KPI) evaluation of drivers and vehicles;
- Correlation analysis of main vehicle parameters;
- Dashboards of the implemented platform.
2. Methodological Approaches and Experiments
- 11-bit ID A
- 18-bit ID B
- Start of frame (SOF) (1bit): indicates the beginning of the transmission sequence;
- Identification A-ID A (11bit): first part of the identifier inherent to the recipient and sender component;
- Substitute remote request (SRR) (1 bit): it is a recessive bit;
- Additional identification bit (IDE) (1 bit): it is a recessive bit;
- Identification B-ID B (18bit): second part of the identifier inherent to the recipient and sender component;
- Remote transmission request (RTR) (1 bit): it is a dominant bit;
- Reserved (Res) (1 bit): reserved according to the type of standard used;
- Data length code (DLC) (4 bits): indicates the number of bytes of the frame payload;
- Data field (DF) (0–8 bytes): represents the payload of the frame whose length is indicated by the DLC field;
- Redundancy parity check (CRC) (15 bit): field to verify that the frame during transmission has not been corrupted;
- CRC delimiter (Del CRC) (1 bit): it is a recessive bit;
- Receipt confirmation (ACK) (1 bit): the recessive bit indicates receipt;
- ACK delimiter (Del ACK) (1 bit): it is a recessive bit;
- End of Frame (EOF) (7 bits): they are recessive bits.
- PG global PGN: it identifies a group of PG parameters, which are sent to all devices or broadcast. Here the Protocol Data Unit (PDU) format, PDU specific, data page and extended data page are used for the identification of the corresponding PG. Global PGNs occur when the PDU format value is greater than or equal to 240. In fact, the PDU specific corresponds to the group extension. The format of the PDU used for this data is the second.
- Specific PGN: are parameter group PG transmitted to particular devices (peer-to-peer). Here the PDU format, data page and the extended page are used for the identification of the corresponding PG. As for the PDU Format, it assumes a value less than 240 and the specific PDU is set to zero. The format of the PDU used for this data is therefore the first.
- GPS time (time acquired by the GPS module);
- Device time (internal clock time of the device);
- Longitude (longitude of the GPS coordinate);
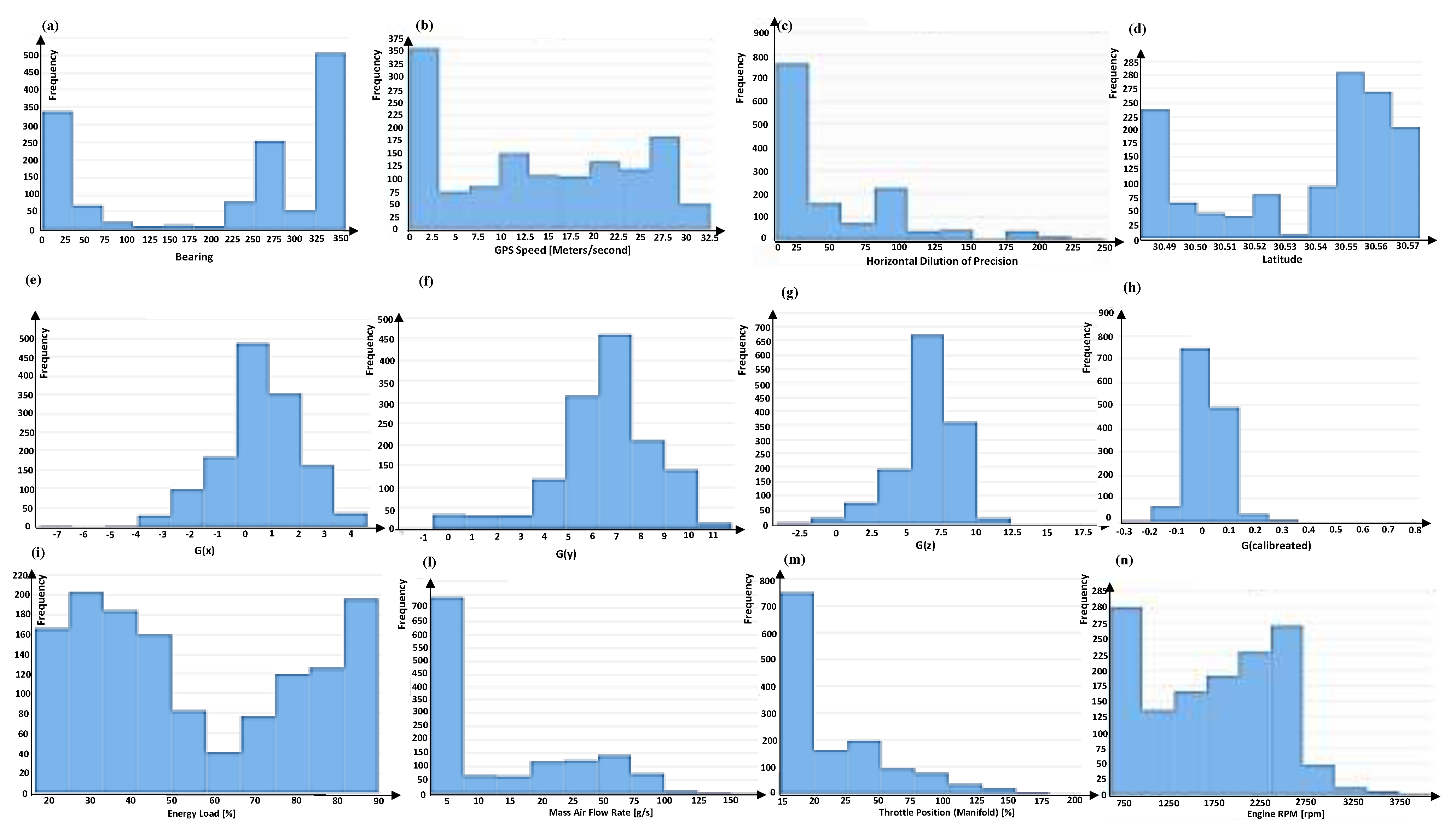
- Latitude (latitude of the GPS coordinate);
- GPS speed (measured in meters/second representing the speed of the vehicle);
- Horizontal dilution of precision (horizontal error on the GPS position);
- Altitude (altitude acquired by the GPS module);
- Bearing (the horizontal angle between the direction and the north);
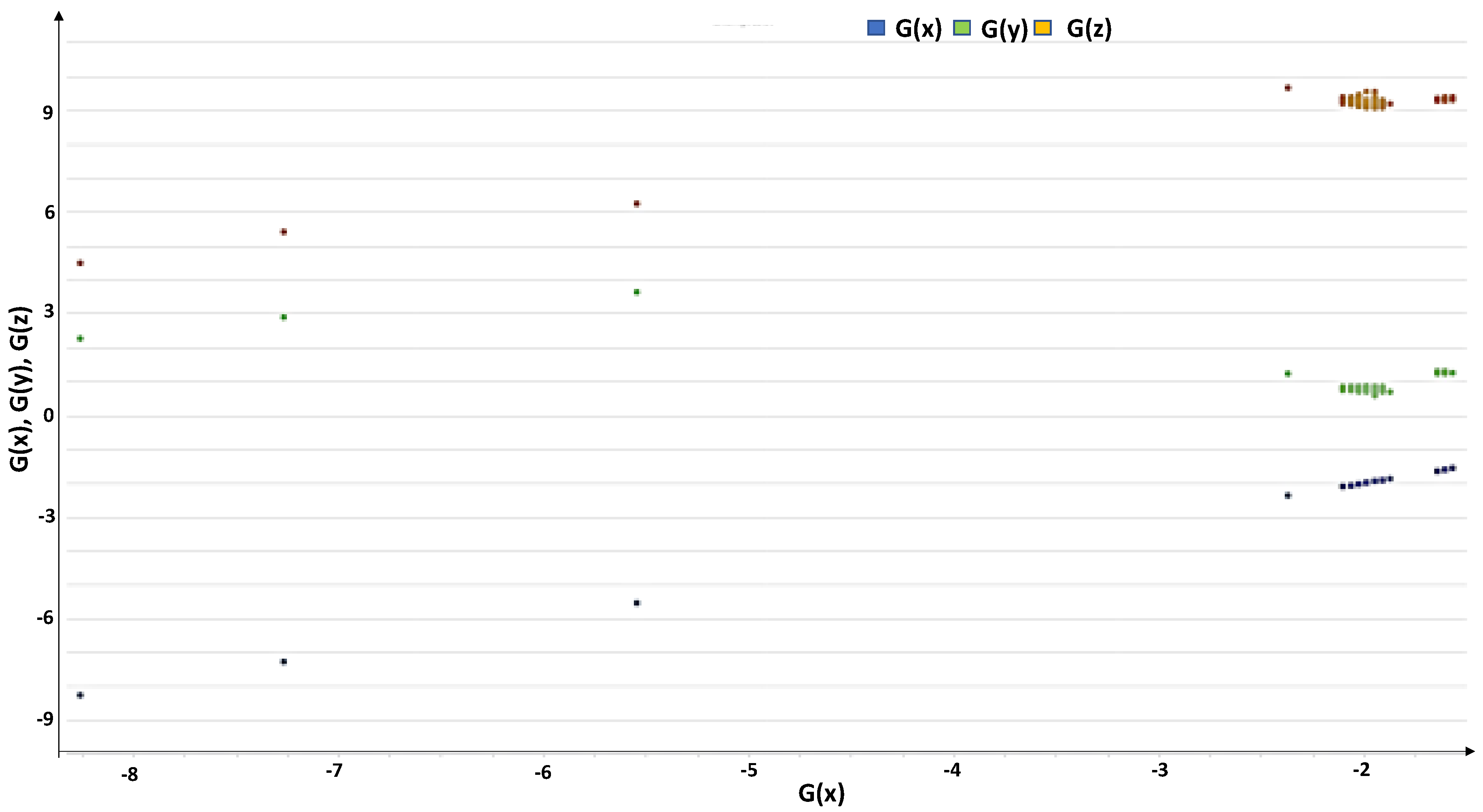
- G(x) (angular velocity (degree per second) on the X axis acquired with gyroscope);
- G(y) (angular velocity (degree per second) on the Y axis acquired with gyroscope);
- G(z) (angular velocity (degree per second) on the Z axis acquired with gyroscope);
- G calibrated (gyro calibration error);
- Engine coolant temperature (temperature in °C of coolant engine liquid);
- Engine RPM (angular speed of the motor shaft expressed in rpm);
- Intake air temperature (temperature of the air entering the combustion chamber expressed in °C);
- Engine load % (percentage of the maximum power supplied by the engine);
- Mass air flow rate (flow rate of the air flow entering the combustion chamber of the engine expressed in g/s);
- Throttle position manifold % (percentage of the accelerator position pressed).
- -
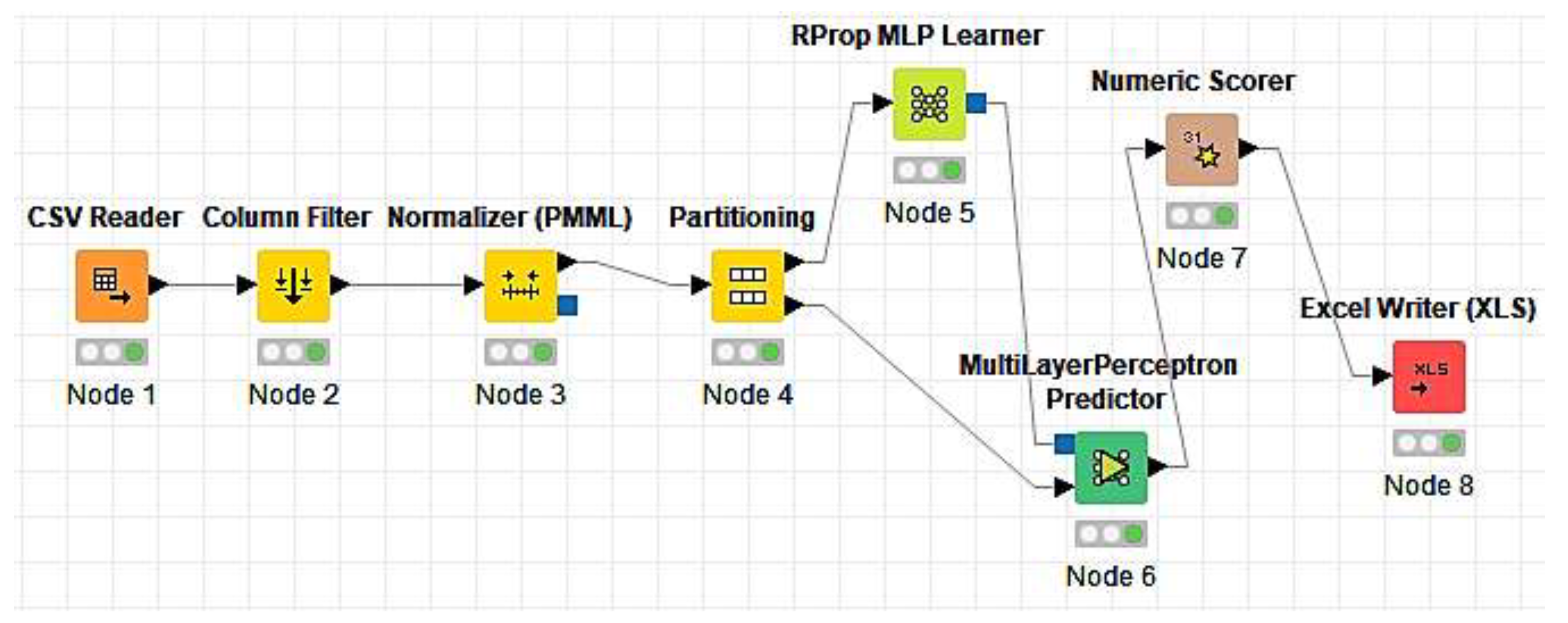
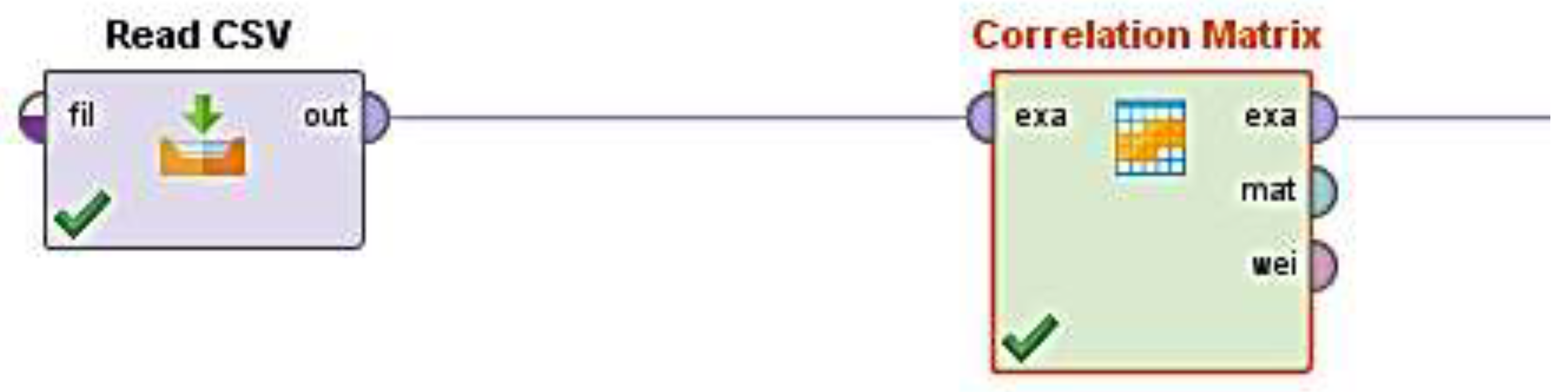
- A data source “CSV Reader” block loading the bus data into a local repository (data extracted from the MySQL database);
- -
- A data pre-processing filtering attributes to select for the data processing (“Column Filter” block);
- -
- A data pre-processing block normalizing all numerical data of the filtered dataset (predictive model markup language (PMML) normalizer “Normalizer (PMML)”);
- -
- A data pre-processing partitioning data for the training and testing processing;
- -
- -
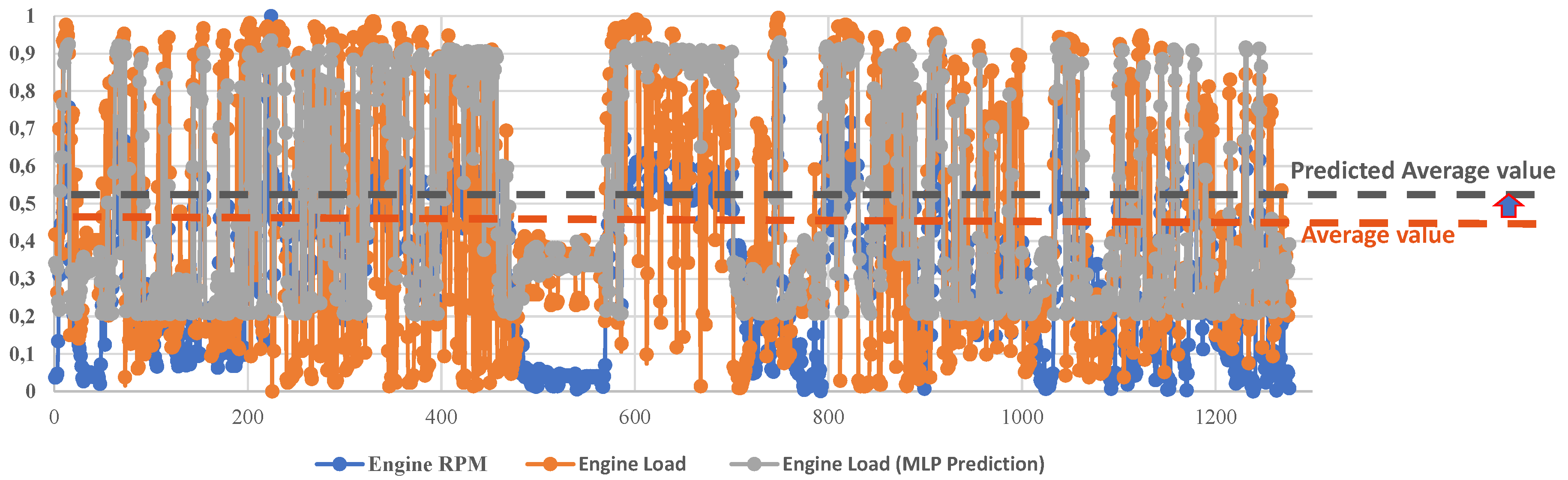
- The “MultiLayerPerceptronPredictor” block model the MLP neural network merging the training workflow with the testing one;
- -
- The numeric score provides the mean squared error (MSE) defined as:
- -
- the “Excel Writer (XLS)” block writes the scoring results in an excel file.
3. Testing and Results
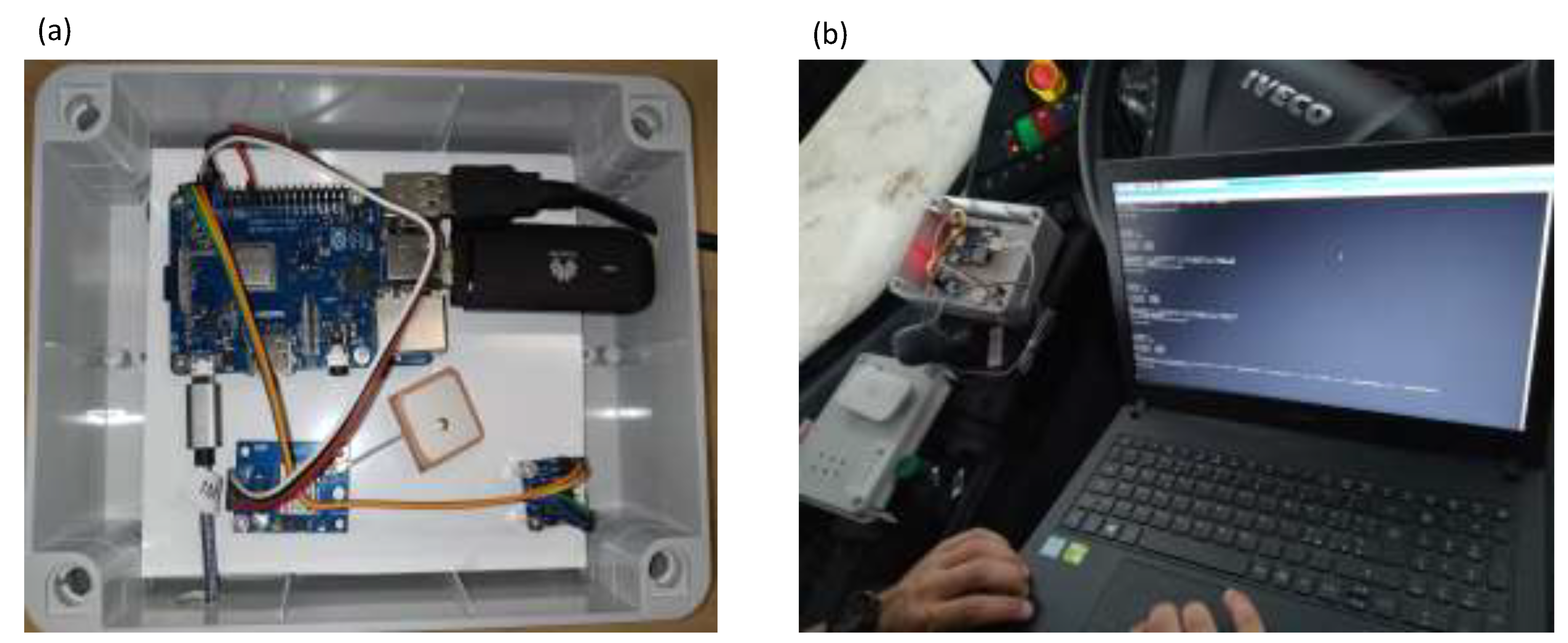
- Verification of the correct functioning of the accelerometer and the GPS module (this check also implies the correct connection with the Raspberry input pins);
- Checking of the auto-starting operation with .desktop files;
- Firmware testing;
- Verification of solution validity using the 4G WiFi router;
- Verification of server data receipt.
- <response [200]>: json received successfully;
- <response [400]>: json not arrived at destination.
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IDENTIFIER A (11 bit) | SRS | IDE | IDENTIFIER B (18 bit) | |||||
| PR | EDP | DP | PDU Format | PF Cont. | PDU Specific | Source Address | ||
| 3 bit | 1 bit | 1 bit | 6 bit (MSB) | 2 bit | 8 bit | 8 bit | ||
- Priority (PR) (3 bit): defined during the arbitration phase.
- Extended data page (DP) (1 bit): generally set to zero.
- Data page (DP) (1 bit): if it is equal to one then the data frame is coded in compliance with the SAE J1939 standard.
- PDU format (PF) (8 bit): indicates the format of the data frame since its value varies the structure of the same frame.
- PF < 239: the data frame refers to specific devices with their 8-bit address. If it is encoded as (0xFF) then it is transmitted to all connected devices, i.e., broadcast.
- PF ≥ 240: the data frame corresponds to a broadcast message.
- PDU specific (PS) (8 bit): this field is specific to the data frame to be transmitted, as it varies in meaning according to the value encoded in the PF.
- PF < 239: the PDU specific field corresponds to the address of the device to which you want to send the data frame.
- PF ≥ 240: the PDU specific field becomes “Group Extension” to form the PGN of the transmitted PG.
- Source address (SD) (8 bit): it is the address of the device that is transmitting the CAN data frame.
| Priority | EDP | DP | PDU Format | PDU Specific | Source Address |
|---|---|---|---|---|---|
| 110 (6 dec.) | 0 | 0 | 234 (0xEA) | Destination Address-Global (255) o Specific | xxxx xxxx |
- DLC: set to a value of three.
- Data filed: the first three bytes correspond to the PGN you want to request, which in the case in question is (0x00FEEE).
| Priority | EDP | DP | PDU Format | PDU Specific | Source Address |
|---|---|---|---|---|---|
| 110 (6 dec.) | 0 | 0 | 254 (0xFE)-PGN | 239 (0xEE)-PGN | xxxx xxxx |
Appendix B
| Variable | Variable Type | PGN hex | SPN | Number of Bits | Resolution | Offset |
|---|---|---|---|---|---|---|
| Total_Fuel_Cons | float | FEE9 | 250 | 32 | 0.5 L/Bit gain | 0 L |
| Fuel_Rate | float | FEF2 | 183 | 16 | 0.05 L/h per bit | 0 L/h |
| Inst_Fuel_Eco | float | FEF2 | 184 | 16 | 1/512 km/L per bit | 0 km/L |
| Pos_Valve | float | FEF2 | 51 | 8 | 0.4%/bit | 0% |
| Fuel_Level | float | FEFC | 96 | 8 | 0.4%/bit | 0% |
| Engine_Hours | float | FEE5 | 247 | 32 | 0.05 ora/bit | 0 |
| Total_RPM | float | FEE5 | 249 | 32 | 1000 giri/bit | 0 |
| Total_Distance | float | FEC1 | 917 | 32 | 5m/bit | 0 m |
| Speed | float | FEF1 | 84 | 16 | 1/256 km/h Bit gain | 0 km/h |
| RPM | float | F004 | 190 | 16 | 0.125 rpm/Bit gain | 0 rpm |
| Percent_Torque | int | F004 | 513 | 8 | 1%/Bit | −125% |
| Percent_Engine | int | F003 | 91 | 8 | 1%/Bit | 0% |
| Temp_Cool | int | FEEE | 110 | 8 | 1 °C/bit | −40 °C |
| Temp_fuel | int | FEEE | 174 | 8 | 2 °C/bit | −40 °C |
| Temp_Oil | float | FEEE | 175 | 16 | 0.03125 °C/bit | −273 °C |
| Volt_Batt | float | //(AT RV) | // | // | // | // |
| SPN | int | ATMPFECA 1 | // | 19 | // | // |
| Variable | Description |
|---|---|
| Total_Fuel_Cons | By running a count for each service delivery, it is possible to monitor the total fuel consumption. |
| Fuel_Rate | It takes into account the driving style of the driver and any losses due to idling. |
| Inst_Fuel_Eco | High consumption indicates an incorrect driving style or the occurrence of a fault. |
| Pos_Valve | It allows to monitor the status of the engine fuel system. |
| Fuel_Level | It is closely linked to the autonomy of travel or to a possible loss of fuel. |
| Engine_Hours | It is useful for monitoring ordinary maintenance actions based on a time scale. |
| Total_RPM | It is useful for monitoring ordinary maintenance actions based on the RPM scale. |
| Total_Distance | It verifies the ordinary maintenance actions based on kilometric scale. |
| Speed | It is closely related to the driver’s driving style. |
| RPM | A high value means more waste of fuel and an incorrect driving style. |
| Percent_Torque | It takes into account the performance of the engine with a view to safety and failures. |
| Percent_Engine | It decreases due to engine deterioration. |
| Temp_Cool | Index of correct engine operation for road safety and guide efficiency. |
| Temp_fuel | It is useful for fire risk estimation. |
| Temp_Oil | It is adopted to control the correct functioning of the motion transmission parts. |
| Volt_Batt | It is used to check possible outages following a continuous engine shutdown. |
| SPN | Index of any anomalies that may require roadside assistance. |
References
- Koscher, K.; Czeskis, A.; Roesner, F.; Patel, S.; Kohno, T.; Checkoway, S.; McCoy, D.; Kantor, B.; Anderson, D.; Shacham, H.; et al. Experimental security analysis of a modern automobile. In Proceedings of the 2010 IEEE Symposium on Security and Privacy, Berkeley/Oakland, CA, USA, 16–19 May 2010. [Google Scholar]
- Wolf, M.; Weimerskirch, A.; Paar, C. Secure in-vehicle communication. In Embedded Security in Cars Securing Current and Future Automotive IT Applications; Lemke, K., Paar, C., Wolf, M., Eds.; Springer: Berlin/Heidelberg, Germany; GmbH: Berlin, Germany, 2006; pp. 95–109. [Google Scholar]
- Klinedinst, D.; King, C. On Board Diagnostics: Risks and Vulnerabilities of the Connected Vehicle; Software Engineering Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 2016. [Google Scholar]
- Wolf, M.; Weimerskirch, A.; Paar, C. Security in automotive bus systems. In Proceedings of the Workshop on Embedded Security in Cars (ESCAR), Bochum, Germany, 10–11 November 2004; pp. 1–13. [Google Scholar]
- Prakash, C.B.; Sirisha, K. Design and implementation of a vehicle theft control unit using GSM and CAN technology. Int. J. Innov. Res. Electron. 2014, 1, 46–53. [Google Scholar]
- Kang, M.-J.; Kang, J.-W. Intrusion detection system using deep neural network for in-vehicle network security. PLoS ONE 2016, 11, e0155781. [Google Scholar] [CrossRef] [PubMed]
- Suwatthikul, J. Fault detection and diagnosis for in-vehicle networks. In Fault Detection; Zhang, W., Ed.; InTech: Rijeka, Croatia, 2010; pp. 283–306. [Google Scholar]
- Jyothi, M.K.; Ravi, S.T. Vehicle health monitoring system. Int. J. Eng. Res. Appl. 2012, 2, 1162–1167. [Google Scholar]
- Lee, M.G.; Park, Y.K.; Jung, K.K.; Yoo, J.J. Estimation of fuel consumption using in-vehicle parameters. Int. J. u e Serv. Sci. Technol. 2011, 4, 37–46. [Google Scholar]
- Ericsson, E. Independent driving pattern factors and their influence on fuel-use and exhaust emission factors. Transp. Res. Part D Transp. Environ. 2001, 6, 325–345. [Google Scholar] [CrossRef]
- Pethakar, S.S.; Srivastava, N.; Suryawanshi, S.D. GPS and GSM based vehicle tracing and employee security system. Int. J. Comput. Appl. 2013, 62, 37–42. [Google Scholar] [CrossRef]
- Pooja, S. Vehicle tracking system using GPS. Int. J. Sci. Res. 2013, 2, 128–130. [Google Scholar]
- Singh, P.; Sethi, T.; Biswal, B.B.; Pattanayak, S.K. A smart anti-theft system for vehicle security. Int. J. Mater. Mech. Manuf. 2015, 3, 249–254. [Google Scholar] [CrossRef]
- Rana, T.; Shah, A.; Rana, P.; Chandak, S. Smart vehicle security. Int. J. Eng. Sci. Comput. 2017, 7, 1–3. [Google Scholar]
- Dukare, S.S.; Patil, D.A.; Rane, K.P. Vehicle tracking, monitoring and alerting system: A review. Int. J. Comput. Appl. 2015, 119, 39–44. [Google Scholar] [CrossRef]
- Kim, J.-S.; Lee, H.-J.; Oh, R.-D. Smart integrated multiple tracking system development for IOT based target-oriented logistics location and resource service. Int. J. Smart Home 2015, 9, 195–204. [Google Scholar] [CrossRef]
- Tarapiah, S.; Atalla, S. Public transportation management system based on GPSWiFi and open street maps. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 189–194. [Google Scholar] [CrossRef]
- Omar, H. Intelligent traffic information system based on integration of internet of things and agent technology. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 37–43. [Google Scholar] [CrossRef]
- Menon, A.; Sinha, R.; Ediga, D.; Iyer, S. Implementation of internet of things in bus transport system of Singapore. Asian J. Eng. Res. 2013, 1, 8–17. [Google Scholar]
- Nowaczyk, S.; Prytz, R.; Rögnvaldsson, T.; Byttner, S. Towards a machine learning algorithm for predicting truck compressor failures using logged vehicle data. In Proceedings of the Twelfth Scandinavian Conference on Artificial Intelligence, Aalborg, Denmark, 20–22 November 2013; Jaeger, M., Nielsen, T.D., Viappiani, P., Eds.; IOS Press Frontiers in Artificial Intelligence and Applications: Amsterdam, The Netherlands, 2013; pp. 205–214. [Google Scholar]
- Arora, S.; Kaur, P.; Arora, P. Economical maintenance and replacement decision making in fleet management using data mining. SIJ Trans. Comput. Sci. Eng. Appl. 2013, 1, 9–20. [Google Scholar] [CrossRef]
- Fan, Y.; Nowaczyk, S.; Rögnvaldsson, T. Incorporating expert knowledge into a self-organized approach for predicting compressor faults in a city bus fleet. Front. Artif. Intell. Appl. 2015, 278, 58–67. [Google Scholar]
- Li, X.; Yu, X.; He, K. Towards effective bus lane monitoring using camera sensors. Wirel. Sens. Netw. 2011, 3, 174–182. [Google Scholar] [CrossRef]
- Hussain, S.; Mahmud, U.; Yang, S. Car e-talk: An IoT-enabled cloud-assisted smart fleet maintenance system. IEEE Internet Things J. 2020, 1. [Google Scholar] [CrossRef]
- Killeen, P.; Ding, B.; Kiringa, I.; Yeap, T. IoT-based predictive maintenance for fleet management. Procedia Comput. Sci. 2019, 151, 607–613. [Google Scholar] [CrossRef]
- Sanches, A.M.; Loures, E.D.F.R.; De Lima, E.P. Use of PROMETHEE method for decision making in bus fleet maintenance proposal of framework. Procedia Manuf. 2019, 39, 1913–1920. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, X.; Wu, Y.; Zhang, Y.; Rong, J. Clustering driver behavior using dynamic time warping and hidden Markov model. J. Intell. Transp. Syst. 2019, 1, 1–14. [Google Scholar] [CrossRef]
- Bichicchi, A.; Belaroussi, R.; Simone, A.; Vignali, V.; Lantieri, C.; Li, X. Analysis of road-user interaction by extraction of driver behavior features using deep learning. IEEE Access 2020, 8, 19638–19645. [Google Scholar] [CrossRef]
- Berthold, M.R.; Cebron, N.; Dill, F.; Gabriel, T.R.; Kötter, T.; Meinl, T.; Ohl, P.; Sieb, C.; Thiel, K.; Wiswedel, B. KNIME: The konstanz information miner. In Data Analysis, Machine Learning and Applications. Studies in Classification, Data Analysis, and Knowledge Organization; Preisach, C., Burkhardt, H., Schmidt-Thieme, L., Decker, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Massaro, A.; Maritati, V.; Savino, N.; Galiano, A.M.; Convertini, D.; De Fonte, E.; Di Muro, M. A study of a health resources management platform integrating neural networks and DSS telemedicine for homecare assistance. Information 2018, 9, 176. [Google Scholar] [CrossRef]
- Data from OBD (On Board Diagnostics). Available online: https://www.kaggle.com/vbandaru/data-from-obd-on-board-diagnostics (accessed on 28 August 2020).
- Riedmiller, M.; Braun, H. A direct adaptive method for faster backpropagation learning: The RPROP algorithm. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993. [Google Scholar]
- Igel, C.; Toussaint, M.; Weishui, W. Rprop using the natural gradient. In Trends and Applications in Constructive Approximation; Mache, D.H., Szabados, J., de Bruin, M.G., Eds.; Birkhäuser: Basel, Switzerland, 2005; Volume 151, pp. 259–272. [Google Scholar] [CrossRef]
- Massaro, A.; Dipierro, G.; Cannella, E.; Galiano, A.M. Comparative analysis among discrete fourier transform, K-means and artificial neural networks image processing techniques oriented on quality control of assembled tires. Information 2020, 11, 257. [Google Scholar] [CrossRef]
- Massaro, A.; Leogrande, A.; Lisco, P.; Galiano, A.; Savino, N. Innovative Bi approaches and methodologies implementing a multilevel analytics platform based on data mining and analytical models: A case of study in roadside assistance services. Int. J. Soft Comput. Artif. Intell. Appl. 2019, 8, 17–36. [Google Scholar] [CrossRef]
- Massaro, A.; Vitti, V.; Lisco, P.; Galiano, A.; Savino, N. A business intelligence platform implemented in a big data system embedding data mining: A case of study. Int. J. Data Min. Knowl. Manag. Process. 2019, 9, 1–20. [Google Scholar] [CrossRef]
- Massaro, A.; Mastandrea, G.; D’Oriano, L.; Rana, G.R.; Savino, N.; Galiano, A. Systems for an intelligent application of automated processes in industry: A case study from “PMI IoT Industry 4.0” project. In Proceedings of the IEEE MetroInd4.0&IoT 2020, Rome, Italy, 3–5 June 2020; pp. 21–26. [Google Scholar] [CrossRef]
- Massaro, A.; Maritati, V.; Galiano, A.; Birardi, V.; Pellicani, L. ESB platform integrating knime data mining tool oriented on industry 4.0 based on artificial neural network predictive maintenance. Int. J. Artif. Intell. Appl. 2018, 9, 1–17. [Google Scholar] [CrossRef]
- Sanchez, D.T.; Boyacı, B.; Zografos, K.G. An optimisation framework for airline fleet maintenance scheduling with tail assignment considerations. Transp. Res. Part B Methodol. 2020, 133, 142–164. [Google Scholar] [CrossRef]
- Shafi, U.; Safi, A.; Shadid, A.R.; Ziauddin, S.; Saleem, M.Q. Vehicle remote health monitoring and prognostic maintenance system. J. Adv. Transp 2018, 1–10. [Google Scholar] [CrossRef]
- Mashhadi, P.S.; Nowaczyk, S.; Pashami, S. Stacked ensemble of recurrennt neural networks for predicting turbocharger remaining useful life. Appl. Sci. 2019, 10, 69. [Google Scholar] [CrossRef]
















| SOF | ID A | SRR | IDE | ID B | RTR | Res | DLC | DF | CRC | Del CRC | ACK | Del ACK | EOF |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 bit | 11 bit | 1 bit | 1 bit | 18 bit | 1 bit | 2 bit | 4 bit | 8 byte | 15 bit | 1 bit | 1 bit | 1 bit | 7 bit |
| Number of Hidden Layers | Neuron Number for Hidden Layer | MSE |
|---|---|---|
| 5 | 5 | 0.0149 |
| 5 | 10 | 0.0129 |
| 5 | 15 | 0.0098 |
| 5 | 20 | 0.085 |
| 10 | 5 | 0.0252 |
| 10 | 10 | 0.0122 |
| 10 | 15 | 0.0094 |
| 10 | 20 | 0.0082 |
| 15 | 5 | 0.0143 |
| 15 | 10 | 0.0031 |
| 15 | 15 | 0.0224 |
| 15 | 20 | 0.0323 |
| Cluster Number | Color | Velocity | Engine Stress | Caution | Fuel Consumption | Total Efficiency Rate |
|---|---|---|---|---|---|---|
| Cluster 0 | Orange | Average/Low | Low | High | Low | High |
| Cluster 1 | Green | Average/Low | Average/Low | Average | Average | Average |
| Cluster 2 | Blue | High | High | Low | High | Low |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massaro, A.; Selicato, S.; Galiano, A. Predictive Maintenance of Bus Fleet by Intelligent Smart Electronic Board Implementing Artificial Intelligence. IoT 2020, 1, 180-197. https://doi.org/10.3390/iot1020012
Massaro A, Selicato S, Galiano A. Predictive Maintenance of Bus Fleet by Intelligent Smart Electronic Board Implementing Artificial Intelligence. IoT. 2020; 1(2):180-197. https://doi.org/10.3390/iot1020012
Chicago/Turabian StyleMassaro, Alessandro, Sergio Selicato, and Angelo Galiano. 2020. "Predictive Maintenance of Bus Fleet by Intelligent Smart Electronic Board Implementing Artificial Intelligence" IoT 1, no. 2: 180-197. https://doi.org/10.3390/iot1020012
APA StyleMassaro, A., Selicato, S., & Galiano, A. (2020). Predictive Maintenance of Bus Fleet by Intelligent Smart Electronic Board Implementing Artificial Intelligence. IoT, 1(2), 180-197. https://doi.org/10.3390/iot1020012