
Design, Development and Testing of Feeding Grippers for Vegetable Plug Transplanters

 ,
, 
 ,
,
Abstract
:1. Introduction
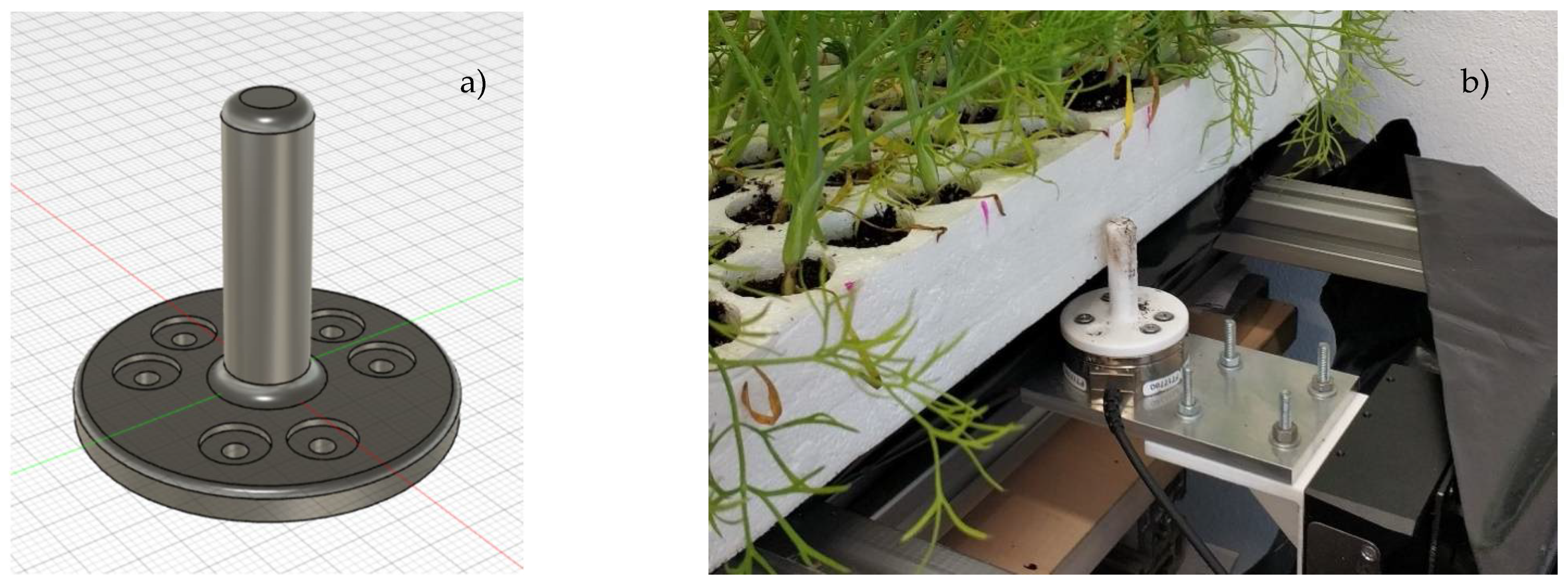
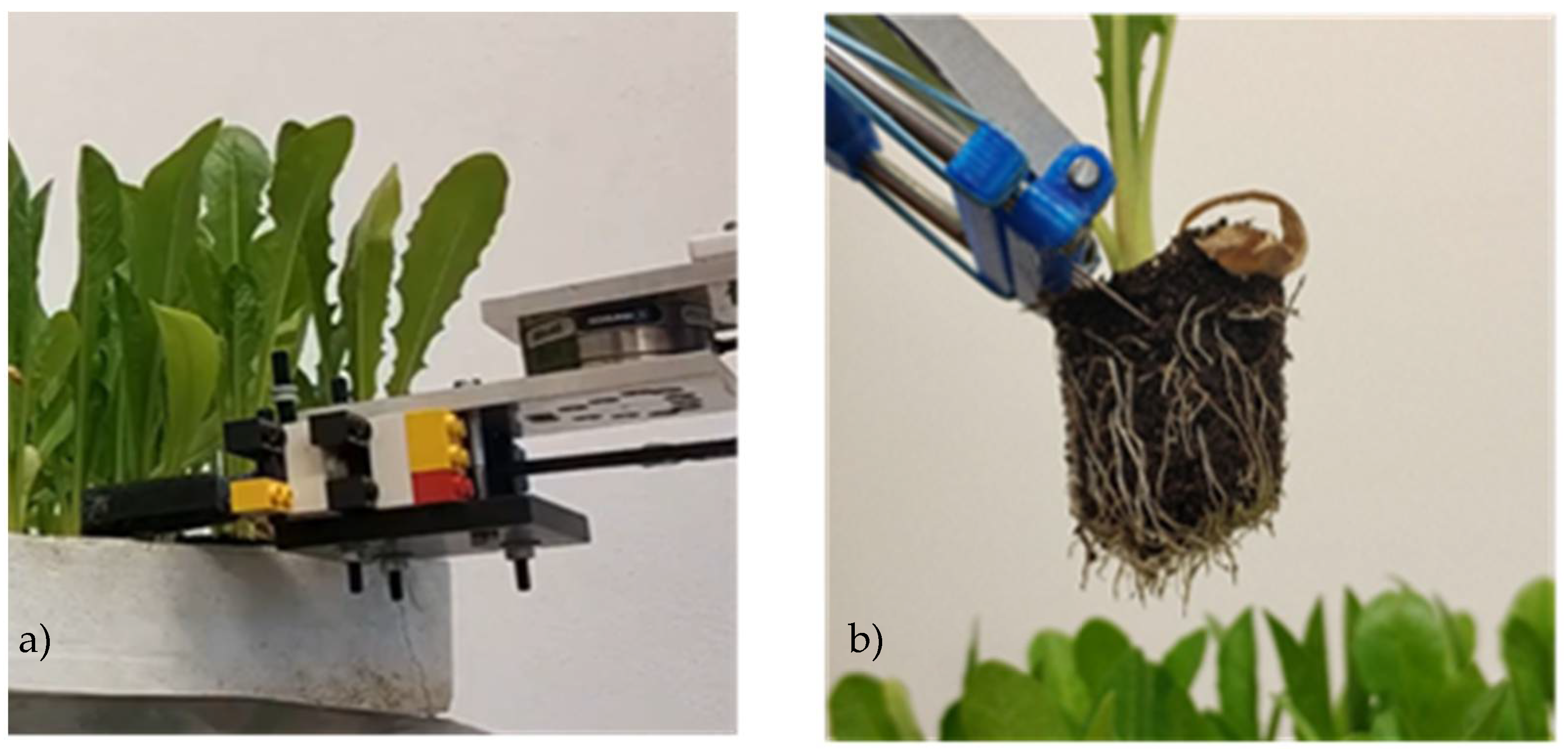
2. Materials and Methods
Design of Experiment
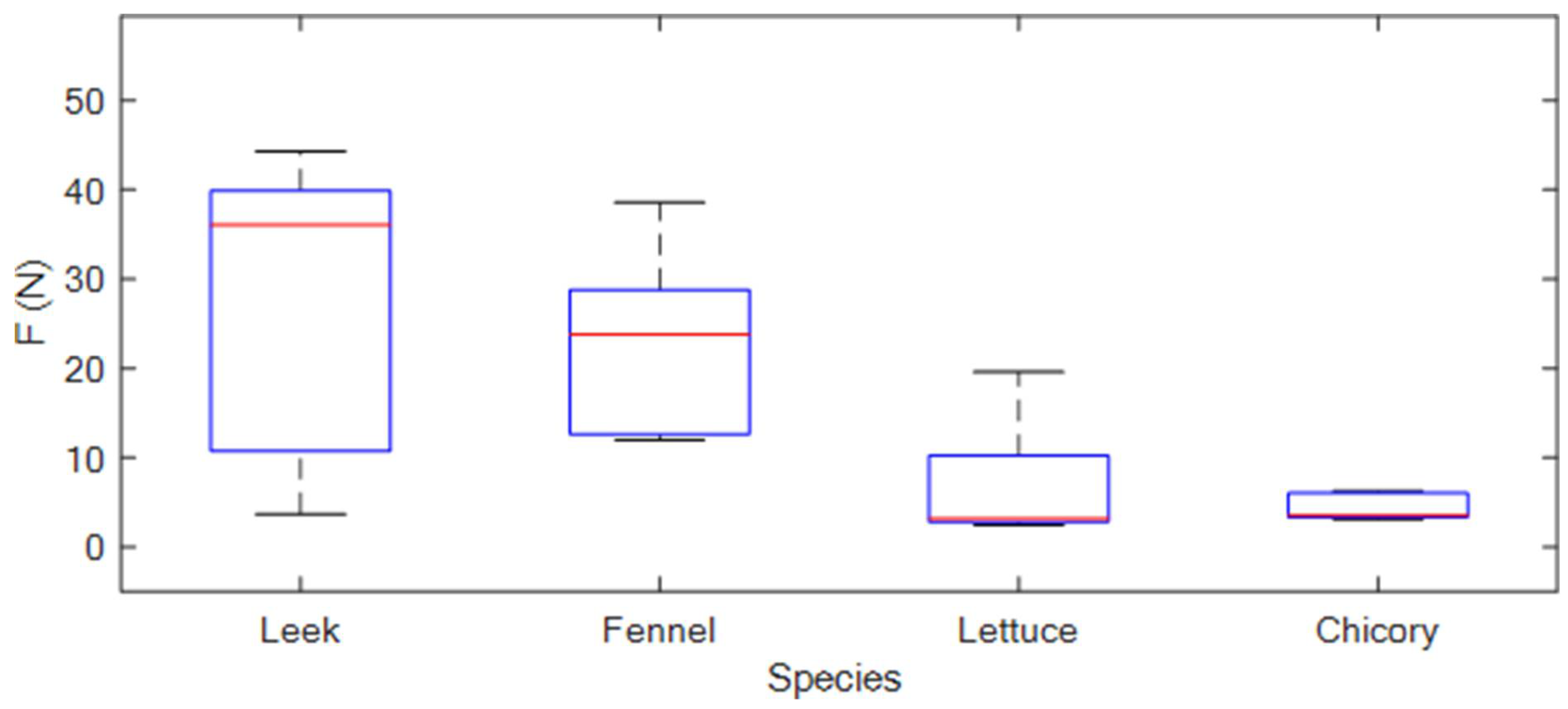
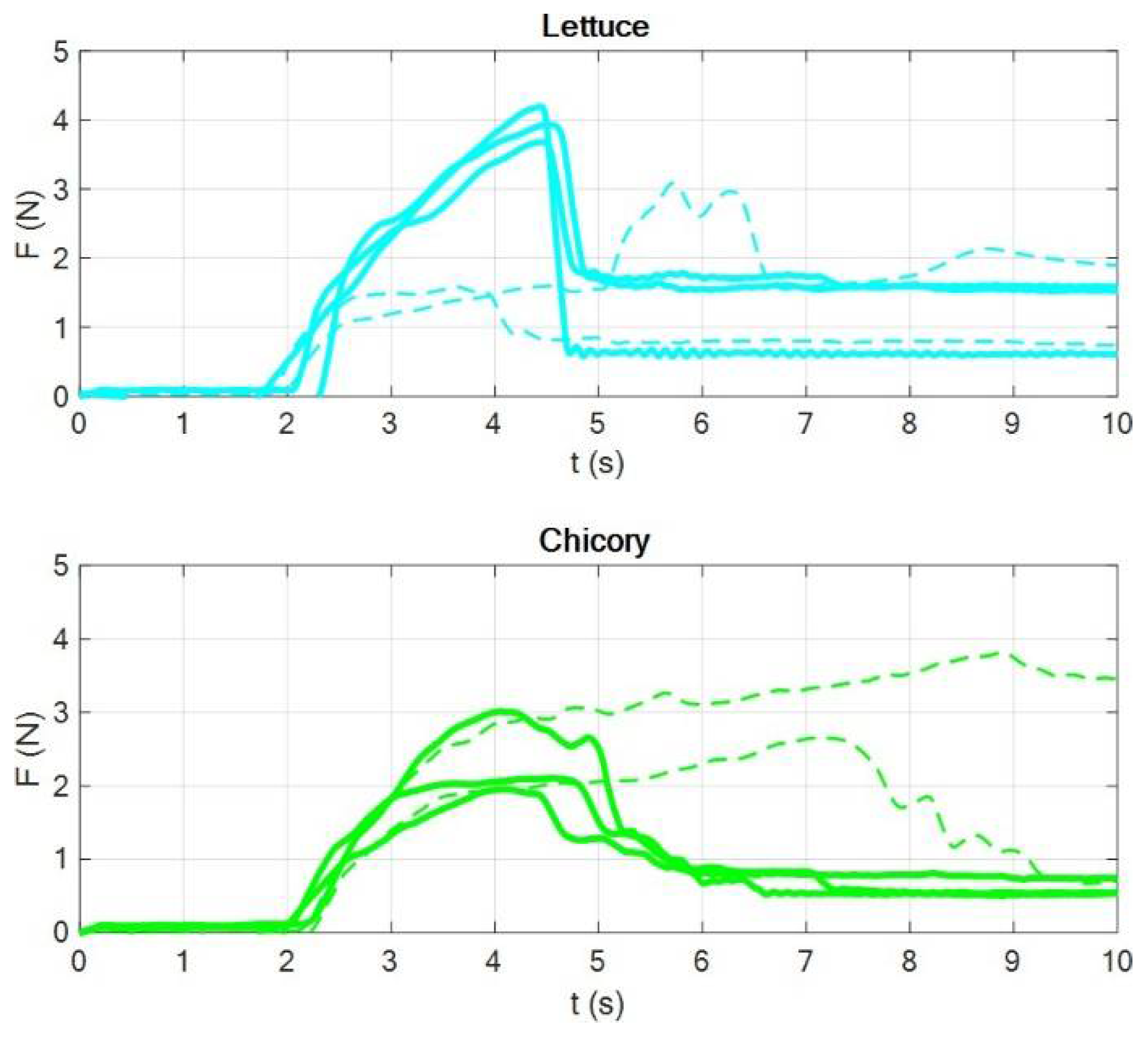
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kumar, G.V.P.; Raheman, H. Vegetable Transplanters for Use in Developing Countries—A Review. Int. J. Veg. Sci. 2008, 14, 232–255. [Google Scholar]
- Tsuga, K. Development of fully automatic vegetable transplanter. Jpn. Agric. Res. Q. 2000, 34, 21–28. [Google Scholar]
- Frasconi, C.; Martelloni, L.; Raffaelli, M.; Fontanelli, M.; Abou Chehade, L.; Peruzzi, A.; Antichi, D. A field vegetable transplanter for use in both tilled and no-till soils. Trans. ASABE 2019, 62, 593–602. [Google Scholar]
- Failla, S.; Pirchio, M.; Sportelli, M.; Frasconi, C.; Fontanelli, M.; Raffaelli, M.; Peruzzi, A. Evolution of Smart Strategies and Machines Used for Conservative Management of Herbaceous and Horticultural Crops in the Mediterranean Basin: A Review. Agronomy 2021, 11, 106. [Google Scholar]
- Jin, X.; Cheng, Q.; Zhao, B.; Ji, J.; Li, M. Design and test of 2ZYM-2 potted vegetable seedlings transplanting machine. Int. J. Agric. Biol. Eng. 2020, 13, 101–110. [Google Scholar]
- Ji, J.; Sun, J.; Jin, X.; Li, M.; Du, X. Development of a PVDF sensor for potted seedling clamping force of vegetable transplanting. Int. J. Agric. Biol. Eng. 2019, 12, 111–118. [Google Scholar]
- Islam, M.N.; Iqbal, M.Z.; Ali, M.; Chowdhury, M.; Kabir, M.S.N.; Park, T.; Kim, Y.-J.; Chung, S.O. Kinematic Analysis of a Clamp-Type Picking Device for an Automatic Pepper Transplanter. Agriculture 2020, 10, 627. [Google Scholar]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar]
- Ramin Shamshiri, R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–11. [Google Scholar]
- Jin, X.; Li, D.; Ma, H.; Ji, J.; Zhao, K.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar]
- Han, L.; Mao, H.; Kumi, F.; Hu, J. Development of a multi-task robotic transplanting workcell for greenhouse seedlings. Appl. Eng. Agric. 2018, 34, 335–342. [Google Scholar]
- Parish, R.L. Current developments in seeders and transplanters for vegetable crops. HortTechnology 2005, 15, 346–351. [Google Scholar]
- Ryu, K.H.; Kim, G.; Han, J.S. AE—Automation and emerging technologies: Development of a robotic transplanter for bedding plants. J. Agric. Eng. Res. 2001, 78, 141–146. [Google Scholar]
- Prasanna Kumar, G.V.; Raheman, H. Volume of vermicompost-based potting mix for vegetable transplants determined using fuzzy biomass growth index. Int. J. Veg. Sci. 2010, 16, 335–350. [Google Scholar]
- Nandede, B.M.; Raheman, H. A tractor drawn vegetable transplanter for handling paper pot seedlings. Ama-Agric. Mech. Asia Africa Latin Am. 2016, 47, 87–92. [Google Scholar]
- Bingliang, Y.; Weiming, Y.; Gaohong, Y.; Yang, G.; Xiong, Z. Optimization design and test of rice plug seedling transplanting mechanism of planetary gear train with incomplete eccentric circular gear and non-circular gears. Int. J. Agric. Biol. Eng. 2017, 10, 43–55. [Google Scholar]
- Hu, J.; Yan, X.; Ma, J.; Qi, C.; Francis, K.; Mao, H. Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot. Comput. Electron. Agric. 2014, 107, 64–72. [Google Scholar]
- Gao, G.H.; Feng, T.X.; Yang, H.; Li, F. Development and optimization of end-effector for extraction of potted anthurium seedlings during transplanting. Appl. Eng. Agric. 2016, 32, 37–46. [Google Scholar]
- Sun, L.; Mao, S.; Zhao, Y.; Liu, X.; Zhang, G.; Du, X. Kinematic analysis of rotary transplanting mechanism for wide-narrow row pot seedlings. Trans. ASAE 2016, 59, 475–485. [Google Scholar]
- Yin, D.Q.; Wang, J.W.; Zhao, Y. Automatic corn potted-seedling transplanter of cycloid gear trains. Appl. Mech. Mater. 2014, 530–531, 960–966. [Google Scholar]
- Kumar, G.P.; Raheman, H. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings. Biosyst. Eng. 2011, 110, 189–197. [Google Scholar]
- Tian, S.; Qiu, L.; Kondo, N.; Yuan, T. Development of automatic transplanter for plug seedling. IFAC Proc. 2010, 43, 79–82. [Google Scholar]
- Fantoni, G.; Santochi, M.; Dini, G.; Tracht, K.; Scholz-Reiter, B.; Fleischer, J.; Kristoffer Lien, T.; Seliger, G.; Reinhart, G.; Franke, J.; et al. Grasping devices and methods in automated production processes. CIRP Ann. Manuf. Technol. 2014, 63, 679–701. [Google Scholar]
- Lien, T.K.; Davis, P.G.G. A Novel Gripper for Limp Materials Based on Lateral Coanda Ejectors. CIRP Ann. 2008, 57, 33–36. [Google Scholar]
- Lien, T.K.; Gjerstad, T.B. A New Reversible Thermal Flow Gripper for Non-Rigid Products. Transactions of the North American Manufacturing Research Institution of SME 2008, 36, 565–572. [Google Scholar]
- Petterson, A.; Ohlsson, T.; Caldwell, D.G.; Davis, S.; Gray, J.O.; Dodd, T.J. A Bernoulli Principle Gripper for Handling of Planar and 3D (Food) Products. Ind. Robot. Int. J. 2010, 37, 518–526. [Google Scholar]
- Șerdean, M.; Șerdean, F.; Mândru, D. An Overview of Grippers in Agriculture Robotic Systems. In New Advances in Mechanisms, Mechanical Transmissions and Robotics; Lovasz, E.C., Maniu, I., Doroftei, I., Ivanescu, M., Gruescu, C.M., Eds.; Springer: Cham, Switzerland, 2020; Volume 88. [Google Scholar]
- Rose, J.C.; Paulus, S.; Kuhlmann, H. Accuracy analysis of a multi-view stereo approach for phenotyping of tomato plants at the organ level. Sensors 2015, 15, 9651–9665. [Google Scholar] [PubMed] [Green Version]
- Simonton, W. Robotic end effector for handling greenhouse plant material. Trans. ASAE 1991, 34, 2615–2621. [Google Scholar]
- Mao, H.; Han, L.; Hu, J.; Kumi, F. Development of a pincette-type pick-up device for automatic transplanting of greenhouse seedlings. Appl. Eng. Agric. 2014, 30, 547–556. [Google Scholar]
- Ting, K.C.; Giacomelli, G.A.; Shen, S.J. Robot workcell for transplanting of seedlings. Part, I. Layout and materials flow. Trans. ASAE 1990, 33, 1005–1010. [Google Scholar]
- Yang, Y.; Ting, K.C.; Giacomelli, G.A. Factors affecting performance of sliding-needles gripper during robotic transplanting of seedlings. Appl. Eng. Agric. 1991, 7, 493–498. [Google Scholar]
- Fantoni, G.; Gabelloni, D.; Tilli, J. Concept design of new grippers using abstraction and analogy. J. Eng. Manuf. 2013, 227, 1521–1532. [Google Scholar]
- Kumar, G.V.P.; Raheman, H. Identification of optimum combination of proportion of vermicompost in the soil-based potting mix and pot volume for the production of paper pot seedlings of vegetables. J. Plant Nutr. 2012, 35, 1277–1289. [Google Scholar]
- Jiang, Z.; Hu, Y.; Jiang, H.; Tong, J. Design and force analysis of end-effector for plug seedling transplanter. PLoS ONE 2017, 12, e0180229. [Google Scholar]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Developement of seedling pick-up device for vegetable transplanters. Trans. ASAE 2002, 45, 13–19. [Google Scholar]
- Sun, G.; Wang, X.; He, G.; Zhou, T.; Wang, C.; Qiao, X. Design of the End-effector for Plug Seedlings Transplanter and Analysis on Virtual Prototype. Trans. CSAM 2010, 41, 48–53. [Google Scholar]
- Tesi, R. Orticultura Mediterranea, 1st ed.; Pàtron Editore: Bologna, Itlay, 2010. [Google Scholar]
- Jorg, O.; Fantoni, G. Fast development cycle for the design of industrial grippers. In Proceedings of the 31st CIRP Design Conference (CIRP Design 2021), Enschede, The Netherlands, 19–21 May 2021. [Google Scholar]
- Di Benedetto, A.H.; Klasman, R. The effect of plug cell volume on the post-transplant growth for Impatiens walleriana pot plant. Eur. J. Horticult. Sci. 2004, 2, 82–86. [Google Scholar]
- Martelloni, L.; Frasconi, C.; Sportelli, M.; Fontanelli, M.; Raffaelli, M.; Peruzzi, A. The Use of Different Hot Foam Doses for Weed Control. Agronomy 2019, 9, 490. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing: Vienna, Austria. 2016. Available online: https://www.R-project.org/ (accessed on 26 April 2021).
- Dihingia, P.C.; Kumar, G.P.; Sarma, P.K.; Neog, P. Production of soil block seedlings in plug trays for mechanical transplanting. Int. J. Veg. Sci. 2017, 23, 471–485. [Google Scholar]
- DIGIMAN 4.0. Available online: https://www.digiman4-0.mek.dtu.dk/ (accessed on 1 September 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hand | Two-Finger | Needle | |
|---|---|---|---|
| leek | 100 | 80 | 80 |
| fennel | 100 | 100 | 100 |
| lettuce | 100 | 100 | 67 |
| chicory | 100 | 100 | 80 |
| Source | Leek | Fennel | Lettuce | Chicory |
|---|---|---|---|---|
| p-Value | ||||
| Treatment | ns | ns | ns | ns |
| Date | *** | *** | *** | *** |
| Treatment × Date | ns | ns | ns | ns |
| Species | Green Cover Percentage (%) | LSD | ||
|---|---|---|---|---|
| 0 DAT | 12 DAT | 35 DAT | ||
| leek | 10.2 b | 14.79 b | 23.97 a | 5.97 |
| fennel | 20.99 b | 38.08 a | 45.28 a | 7.31 |
| lettuce | 14.12 b | 18.22 b | 30.01 a | 4.54 |
| chicory | 16.06 b | 19.63 b | 35.9 a | 4.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jorg, O.J.; Sportelli, M.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Fantoni, G. Design, Development and Testing of Feeding Grippers for Vegetable Plug Transplanters. AgriEngineering 2021, 3, 669-680. https://doi.org/10.3390/agriengineering3030043
Jorg OJ, Sportelli M, Fontanelli M, Frasconi C, Raffaelli M, Fantoni G. Design, Development and Testing of Feeding Grippers for Vegetable Plug Transplanters. AgriEngineering. 2021; 3(3):669-680. https://doi.org/10.3390/agriengineering3030043
Chicago/Turabian StyleJorg, Oliver Jonas, Mino Sportelli, Marco Fontanelli, Christian Frasconi, Michele Raffaelli, and Gualtiero Fantoni. 2021. "Design, Development and Testing of Feeding Grippers for Vegetable Plug Transplanters" AgriEngineering 3, no. 3: 669-680. https://doi.org/10.3390/agriengineering3030043
APA StyleJorg, O. J., Sportelli, M., Fontanelli, M., Frasconi, C., Raffaelli, M., & Fantoni, G. (2021). Design, Development and Testing of Feeding Grippers for Vegetable Plug Transplanters. AgriEngineering, 3(3), 669-680. https://doi.org/10.3390/agriengineering3030043