Development and Identification of Working Parameters for a Lychee Peeling Machine Combining Rollers and a Pressing Belt


 ,
,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Lychee Fruits and Their Physical Characteristics
2.2. Experiments Testing Lychees’ Mechanical Friction Properties
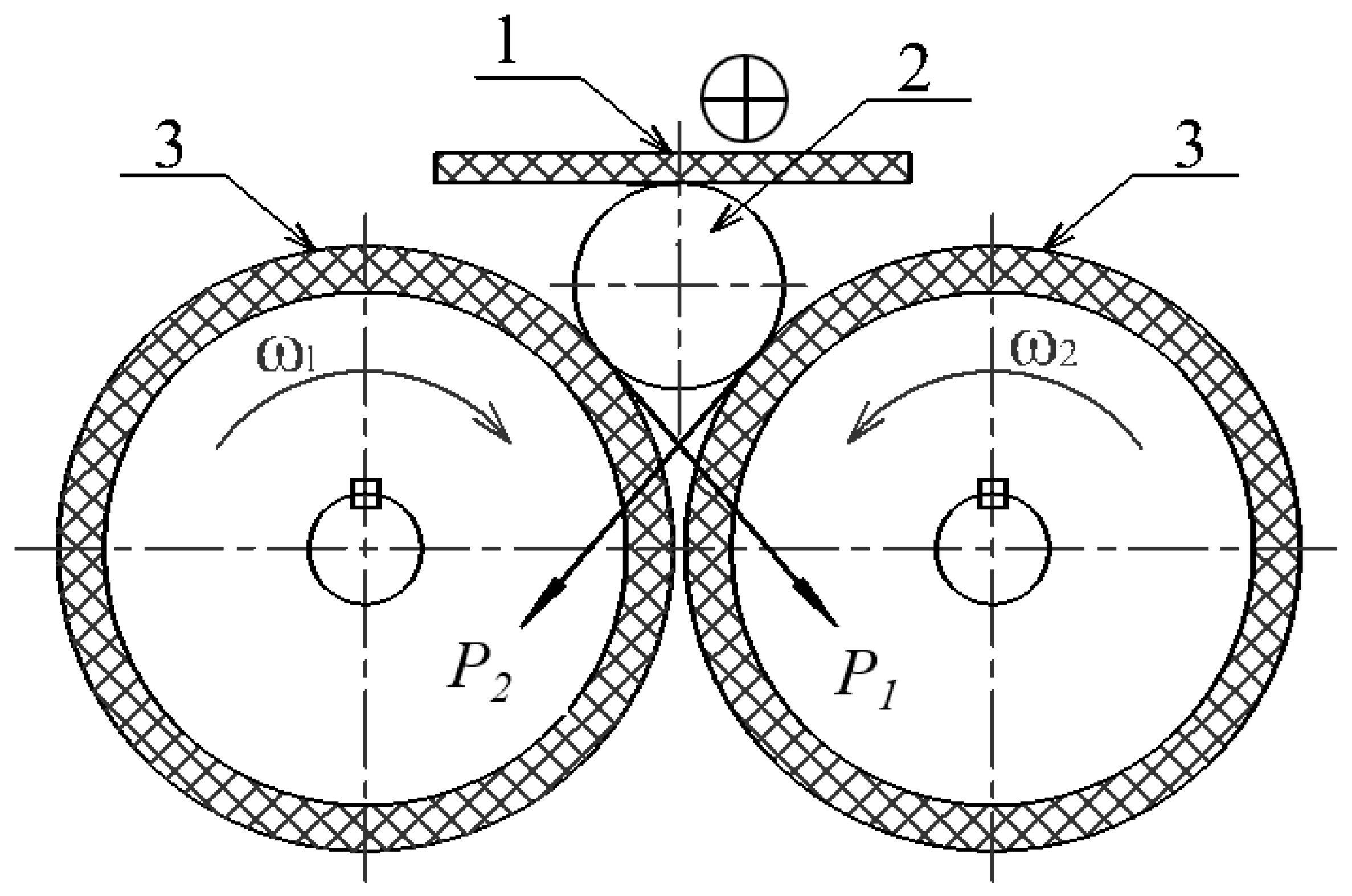
2.3. Description of Peeling Working Principle
2.4. Description of the Whole Machine
2.5. Flowchart Methodology
- Step I: Selection of working principle. In this step, the chosen working principle combining friction and shearing is detailed.
- Step II: Design of main machine parts, such as rollers, belt, and spiral grooved roller surface. Other parts of the machine were also indicated.
- Step III: The physical characteristics of lychee fruits and their mechanical properties—especially critical peeling force—were determined using equipment at the Strength of Materials Laboratory, Faculty of Engineering, Vietnam National University of Agriculture.
- Step IV: Analytical identification of working parameters. In this final step, the characteristics of the rollers, such as length, diameter, and gap as well as rotation speed; the characteristics of belt, such as length and width, velocity, and required pressure; and the characteristics of spiral groove, such as number, pitch, and depth, were calibrated based on earlier experimental data and the balanced force principle. Numerical simulation using Autocad Inventor, version 22.0 (Autodesk, San Rafael, CA, USA) was also performed for assembling of (moving and fixed) parts and fabrication of machine, for the use of experimental validation tests later.
3. Results and Discussions
3.1. Physical and Mechanical Properties of Lychee Fruits
3.1.1. Physical Properties
3.1.2. Critical Peeling Force for Lychee Fruits
3.2. Analytical Identification of Machine Operational Parameters
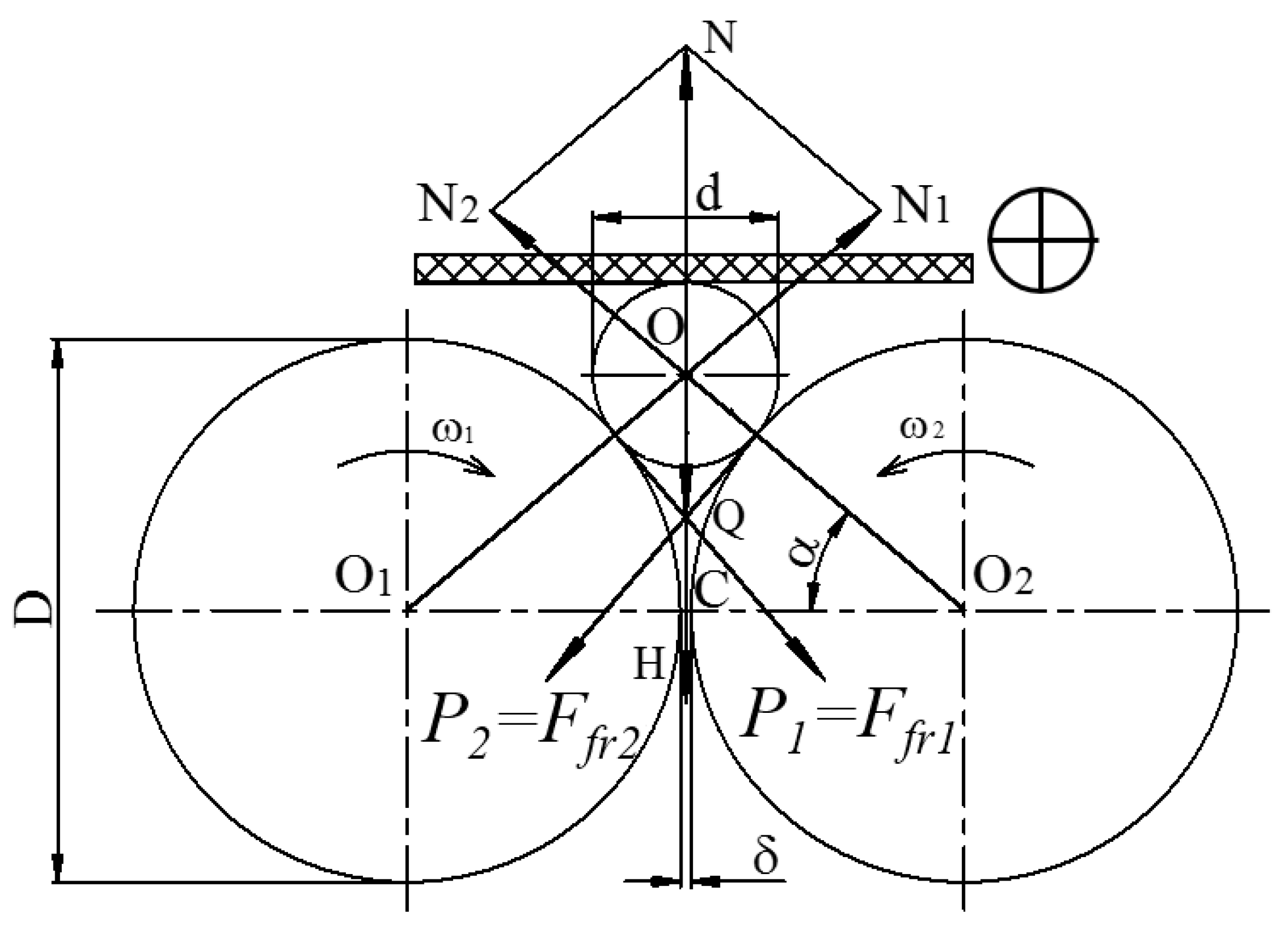
3.2.1. Identification of Optimal Roller Diameter, Gap Size, and Belt Pressure
3.2.2. Identification of Roller Rotation Speed and Belt Velocity
4. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Designation | Description | SI Unit |
| D | Roller diameter | mm |
| Dopt | Optimal roller diameter | mm |
| F | Force exerted on the arm | N |
| Fcr | Critical peeling force | N |
| Ffr | Friction force between fruit and roller | N |
| Ffrb | Friction force between fruit and pressing belt | N |
| Ffr1 | Friction force exerted on fruit by roller N°1 | N |
| Ffr2 | Friction force exerted on fruit by roller N°2 | N |
| Fsp | Force exerted on fruit by spring | N |
| H | Belt pressure | N |
| L | Roller length | mm |
| Lopt | Optimal roller length | mm |
| Lwl | Minimum working length of rollers | mm |
| N | Force exerted on fruit by roller | N |
| N1 | Radial force exerted on fruit by roller N°1 | N |
| N2 | Radial force exerted on fruit by roller N°2 | N |
| O | Center of gravity of fruit | - |
| Oi, (i = 1, 2) | Center of roller circular section | - |
| P1 | Tangential force exerted on fruit by roller N°1 | N |
| P2 | Tangential force exerted on fruit by roller N°2 | N |
| Q | Average fruit weight | kg |
| R | Roller radius | mm |
| S | Pitch of spiral groove | mm |
| Vb | Belt velocity | mm/s |
| Vfruit | Fruit velocity | mm/s |
| Vspr | Spiral velocity | mm/s |
| Zfruit | Average number of fruits weighted 1 kg | - |
| a | Distance between two consecutive fruits along the roller axis | mm |
| d | Average fruit diameter | mm |
| f | Friction coefficient between fruit and roller | - |
| k | Spring stiffness | N/m |
| l | Level arm (moment arm) | mm |
| nr | Number of fruit rounds | - |
| q | Expected throughput | kg/h |
| α | Angle between N1 (or N2) and the horizontal | |
| β | Coefficient of distance between two consecutive fruits | - |
| γ | Coefficient of sliding of fruits | - |
| λ | Spring deformed length | mm |
| μ | Coefficient of static friction | - |
| ω1 | Rotation speed of roller N°1 | RPM |
| ω2 | Rotation speed of roller N°2 | RPM |
| ω | Rotation speed of roller | RPM |
| δ | Gap size between two rollers | mm |
| δopt | Optimal gap size | mm |
References
- Caballero, B.; Trugo, L.; Finglas, P.M. Encyclopedia of Food Science and Nutrition; Academic Press: Cambridge, MA, USA, 2003; ISBN 978-0-12-227055-0. [Google Scholar]
- Menzel, C.M.; Simpson, D.R. Lychee nutrition: A review. Sci. Hortic. 1987, 31, 195–224. [Google Scholar] [CrossRef]
- Wang, C.; Zou, X.; Tang, Y.; Luo, L.; Feng, W. Localisation of litchi in an unstructured environment using binocular stereo vision. Biosyst. Eng. 2016, 145, 39–51. [Google Scholar] [CrossRef]
- Vandeveer, M.L. Demand for area crop insurance among litchi producers in northern Vietnam. Agric. Econ. 2001, 26, 173–184. [Google Scholar] [CrossRef]
- Tran, D.T.; Hertog, M.; Nicolaï, B.M. Hierarchical response surface methodology for optimization of postharvest treatments to maintain quality of litchi cv. ‘Thieu’ during cold storage. Postharvest Biol. Technol. 2016, 117, 94–101. [Google Scholar] [CrossRef]
- Qiao, F.; Huang, L.; Xia, W. A study on microwave vacuum dried re-structured lychee (Litchi chinensis Sonn.) mixed with purple sweet potato (Ipomoea batatas) snacks. Food Bioprod. Process. 2012, 90, 653–658. [Google Scholar] [CrossRef]
- Kosseva, M.; Joshi, V.K.; Panesar, P.S. Science and Technology of Fruit Wine Production; Academic Press: Cambridge, MA, USA, 2016; ISBN 978-0-12-801034-1. [Google Scholar]
- Holcroft, D.M.; Mitcham, E.J. Postharvest physiology and handling of litchi (Litchi chinensis Sonn.). Postharvest Biol. Technol. 1996, 9, 265–281. [Google Scholar] [CrossRef]
- Xiong, J.; Lin, R.; Liu, Z.; He, Z.; Tang, L.; Yang, Z.; Zou, X. The recognition of litchi clusters and the calculation of picking point in a nocturnal natural environment. Biosyst. Eng. 2018, 166, 44–57. [Google Scholar] [CrossRef]
- Batten, D.J. Maturity criteria for litchis (lychees). Food Qual. Prefer. 1989, 1, 149–155. [Google Scholar] [CrossRef]
- Wang, W.; Lu, H.; Zhang, S.; Yang, Z. Damage caused by multiple impacts of litchi fruits during vibration harvesting. Comput. Electron. Agric. 2019, 162, 732–738. [Google Scholar] [CrossRef]
- Moustier, P.; Tam, P.T.G.; Anh, D.T.; Binh, V.T.; Loc, N.T.T. The role of farmer organizations in supplying supermarkets with quality food in Vietnam. Food Policy 2010, 35, 69–78. [Google Scholar] [CrossRef]
- He, Z.-L.; Xiong, J.-T.; Lin, R.; Zou, X.; Tang, L.-Y.; Yang, Z.-G.; Liu, Z.; Song, G. A method of green litchi recognition in natural environment based on improved LDA classifier. Comput. Electron. Agric. 2017, 140, 159–167. [Google Scholar] [CrossRef]
- Thompson, A.K. Postharvest Technology of Fruits and Vegetables. In Fruit and Vegetables; John Wiley & Sons: Hoboken, NJ, USA, 2007; pp. 115–369. ISBN 978-0-470-75106-0. [Google Scholar]
- Bochtis, D.D.; Sørensen, C.G.C.; Busato, P. Advances in agricultural machinery management: A review. Biosyst. Eng. 2014, 126, 69–81. [Google Scholar] [CrossRef]
- Li, X.; Pan, Z.; Atungulu, G.G.; Zheng, X.; Wood, D.; Delwiche, M.; McHugh, T.H. Peeling of tomatoes using novel infrared radiation heating technology. Innov. Food Sci. Emerg. Technol. 2014, 21, 123–130. [Google Scholar] [CrossRef]
- Siddiq, M. Tropical and Subtropical Fruits: Postharvest Physiology, Processing and Packaging; John Wiley & Sons: Hoboken, NJ, USA, 2012; ISBN 978-1-118-32411-0. [Google Scholar]
- Nguyen, X.T.; Bernhardt, G. Influences of Concave Length and Feeding Angle on Separation Capacity in the Multi-cylinder Threshing System. Landtechnik 2008, 63, 276–277. [Google Scholar]
- Manjunatha, M.; Samuel, D.V.K.; Anurag, R.K.; Gaikwad, N. Development and performance evaluation of a garlic peeler. J. Food. Sci. Technol. 2014, 51, 3083–3093. [Google Scholar] [CrossRef]
- Chen, H.; Xu, X.; Yin, Y.; Pan, H.; Bao, X.; Li, S.; Xu, Q. Experimental study on mechanical properties and peel separation characteristics of citrus reticulate blanco with peel clamped moving. Nongye Gongcheng Xuebao 2017, 33, 25–31. [Google Scholar]
- Pan, H.; Wang, Z.; Chen, H.; Liu, J.; Tong, Y.; Shi, X. Design and experiment on dual rollers peeling machine for satsuma mandarin. Nongye Gongcheng Xuebao 2015, 31, 239–245. [Google Scholar]
- Vidyarthi, S.K.; El Mashad, H.M.; Khir, R.; Zhang, R.; Tiwari, R.; Pan, Z. Evaluation of selected electric infrared emitters for tomato peeling. Biosyst. Eng. 2019, 184, 90–100. [Google Scholar] [CrossRef]
- Jimoh, M.O.; Olukunle, O.J. An Automated Cassava Peeling System for the Enhancement of Food Security in Nigeria. Niger. Food J. 2012, 30, 73–79. [Google Scholar] [CrossRef]
- Purbey, S.; Kumar, K.K. Tools and Machinery for development of Litchi; Tools and machinery for Development of Horticulture: Kerala, India, 2009. [Google Scholar]
- Vishwakarma, R.; Nambi, E.; Gupta, R.K. Litchi Fruit Peeling Machine. Available online: https://icar.org.in/content/directorate-knowledge-management-agriculture (accessed on 1 September 2019).
- CN103445277A-Lychee Branch Removal Machine-Google Patents. Available online: https://patents.google.com/patent/CN103445277A/en?inventor=%E5%86%AF%E5%8B%8B%E5%81%A5 (accessed on 1 September 2019).
- Henan Hiwant International Co., Ltd. Haihuang Industrial Zone, middle section of Anlin rd, Anyang, Henan, China. Available online: http://www.hifruitmachine.com/Fruit%20Processing%20Products/lychee-litchi-lichee-longan-rambutan-peeling-machine/ (accessed on 1 September 2019).
- Menzel, C.M.; Simpson, D.R. Growth, flowering and yield of lychee cultivars. Sci. Hortic. 1992, 49, 243–254. [Google Scholar] [CrossRef]
- Xiong, J.; He, Z.; Lin, R.; Liu, Z.; Bu, R.; Yang, Z.; Peng, H.; Zou, X. Visual positioning technology of picking robots for dynamic litchi clusters with disturbance. Comput. Electron. Agric. 2018, 151, 226–237. [Google Scholar] [CrossRef]
- Qing, Y.; Li, C.; Cao, Y.; Zhang, Z.; Cheng, H. Test and analyse on macromechanic parameters of longan. Nongye Jixie Xuebao 2010, 41, 125–134. [Google Scholar]
- Wang, F.; Wang, C.; Yang, X. Mechanics characteristics and finite element analysis of watermelon. Trans. Chin. Soc. Agric. Eng. 2008, 24, 118–121. [Google Scholar]
- Junwei, L.; Yunhai, M.; Jin, T.; Zichao, M.; Lidong, W.; Jiangtao, Y. Mechanical properties and microstructure of potato peels. Int. J. Food Prop. 2018, 21, 1395–1413. [Google Scholar] [CrossRef]
- Kunpeng, T.; Shen, C.; Xianwang, L.; Huang, J.; Qiaomin, C.; Bin, Z. Mechanical properties and compression damage simulation by finite element for kiwifruit. Int. Agric. Eng. J. 2017, 26, 193–203. [Google Scholar]
- Williams, H.A.M.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- Singh, K.K.; Boreddy, S. Postharvest physico-mechanical properties of orange peel and fruit. J. Food Eng. 2006, 73, 112–120. [Google Scholar] [CrossRef]
- Chen, Y.; Li, J.; Wang, J.; Jiang, Z.; Zou, X.; Liu, W. Test of Mechanical Parameters for Litchi and Analysis for Its Difference. DEStech Trans. Mater. Sci. Eng. 2017. [Google Scholar] [CrossRef][Green Version]
- Chen, Y.; Cai, W.; Zou, X.; Xiang, H. Extrusion mechanical properties of fresh litchi. Nongye Gongcheng Xuebao 2011, 27, 360–364. [Google Scholar]
- Chen, Y.; Cai, W.; Zou, X.; Xiang, H.; Liu, T.; Xu, F. Mechanical properties test and finite element analysis for litchi. Nongye Gongcheng Xuebao 2011, 27, 358–363. [Google Scholar]
- Chen, Y.; Cai, W.; Xiang, H.; Zou, X.; Tan, J.; Lin, G. Mechanical properties of litchi stem for harvesting robots. Nongye Gongcheng Xuebao 2012, 28, 53–58. [Google Scholar]
- Wang, W.; Yang, Z.; Lu, H.; Fu, H. Mechanical damage caused by fruit-to-fruit impact of litchis. IFAC-PapersOnLine 2018, 51, 532–535. [Google Scholar] [CrossRef]
- Xiong, J.; Lin, R.; Bu, R.; Liu, Z.; Yang, Z.; Yu, L. A Micro-Damage Detection Method of Litchi Fruit Using Hyperspectral Imaging Technology. Sensors 2018, 18, 700. [Google Scholar] [CrossRef] [PubMed]
- Yousefi, S.; Farsi, H.; Kheiralipour, K. Drop test of pear fruit: Experimental measurement and finite element modelling. Biosyst. Eng. 2016, 147, 17–25. [Google Scholar] [CrossRef]
- Ghodki, B.M.; Patel, M.; Namdeo, R.; Carpenter, G. Calibration of discrete element model parameters: Soybeans. Comput. Part. Mech. 2019, 6, 3–10. [Google Scholar] [CrossRef]
- Ly, H.-B.; Pham, B.T.; Dao, D.V.; Le, V.M.; Le, L.M.; Le, T.-T. Improvement of ANFIS Model for Prediction of Compressive Strength of Manufactured Sand Concrete. Appl. Sci. 2019, 9, 3841. [Google Scholar] [CrossRef]
- Mezhericher, M.; Brosh, T.; Levy, A. Modeling of Particle Pneumatic Conveying Using DEM and DPM Methods. Part. Sci. Technol. 2011, 29, 197–208. [Google Scholar] [CrossRef]
- Autodesk Inventor Version 22.0; Autodesk: San Rafael, CA, USA, 2018.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Parameter | Optimal Value | SI Unit |
|---|---|---|---|
| 1 | Roller diameter | 100 | mm |
| 2 | Gap size between two rollers | 4 | mm |
| 3 | Roller length | 900 | mm |
| 4 | Roller rotation speed | 159 | RPM |
| 5 | Number of spiral grooves | 16 | - |
| 6 | Pitch of spiral groove | 22 | mm |
| 7 | Depth of spiral groove | 1 | mm |
| 8 | Belt length | 850 | mm |
| 9 | Belt width | 60 | mm |
| 10 | Belt speed | 140 | mm/s |
| 11 | Belt pressure | 13.5 | N |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, L.M.; Nguyen, T.C.; Pham, B.T.; Ly, H.-B.; Le, V.M.; Le, T.-T. Development and Identification of Working Parameters for a Lychee Peeling Machine Combining Rollers and a Pressing Belt. AgriEngineering 2019, 1, 550-566. https://doi.org/10.3390/agriengineering1040040
Le LM, Nguyen TC, Pham BT, Ly H-B, Le VM, Le T-T. Development and Identification of Working Parameters for a Lychee Peeling Machine Combining Rollers and a Pressing Belt. AgriEngineering. 2019; 1(4):550-566. https://doi.org/10.3390/agriengineering1040040
Chicago/Turabian StyleLe, Lu Minh, Thong Chung Nguyen, Binh Thai Pham, Hai-Bang Ly, Vuong Minh Le, and Tien-Thinh Le. 2019. "Development and Identification of Working Parameters for a Lychee Peeling Machine Combining Rollers and a Pressing Belt" AgriEngineering 1, no. 4: 550-566. https://doi.org/10.3390/agriengineering1040040
APA StyleLe, L. M., Nguyen, T. C., Pham, B. T., Ly, H.-B., Le, V. M., & Le, T.-T. (2019). Development and Identification of Working Parameters for a Lychee Peeling Machine Combining Rollers and a Pressing Belt. AgriEngineering, 1(4), 550-566. https://doi.org/10.3390/agriengineering1040040