
Should Autonomous Vehicles Collaborate in a Complex Urban Environment or Not?



Abstract
:1. Introduction
- Modeling convoy driving in an urban environment leveraging the coalition game framework. The novel and all-comprehensive utility functions are designed to realize the coalition formation of autonomous vehicles to drive collaboratively.
- Utilizing multiple solution concepts, such as the Shapley allocation, the Core, and the Nucleolus, to solve and analyze the game, providing an understanding of the outcomes and implications of the coalition formation process.
- Modeling and implementing several effective coalition formation strategies, including joining a coalition, selecting optimal coalitions, and making decisions about coalition merging.
- Carried out numerical experiments to validate the real-world benefits of convoy driving such as reduced fuel consumption, travel time enhanced safety, and ride comfort.
2. Background and Related Work
2.1. Coalition
2.2. Utility Function
2.3. Solution Concept
2.4. Related Work
3. Convoy Driving—A Coalitional Formation Game
3.1. Problem Formulation
- Players: Individual vehicles in the urban environment where each vehicle aims to achieve its objectives, such as reducing fuel consumption, minimizing travel time, and maximizing passenger comfort.
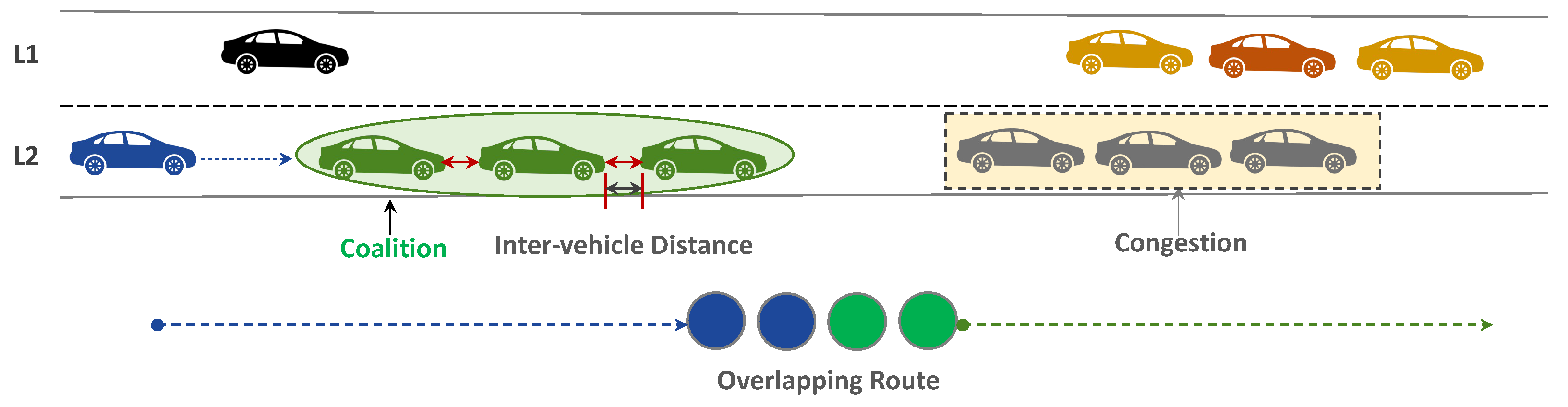
- Coalition: Groups of vehicles forming convoys. A convoy is a formation where vehicles travel closely together, synchronized in their movements.
- Characteristic Function: The function, denoted as , assigns a value to each coalition. In the convoy driving problem, the characteristic function captures the benefits and costs associated with forming a convoy. It takes into account several factors such as fuel efficiency gains, reduced air resistance, improved travel time, and potential trade-offs related to coordination and constraints imposed on individual vehicles.
3.2. Assumptions
- A1:
- All the simulated vehicles are autonomous vehicles capable of communicating and coordinating with each other.
- A2:
- At the time t, a vehicle can be a part of one coalition , implying that cannot travel as part of two coalitions at a time.
- A3:
- A minimum of two vehicles are required to form and travel in a coalition .
- A4:
- The utility of the players depends solely on the members of the coalition , implying that any external entity does not influence it.
- A5:
- Any new vehicle desiring to join the coalition can only be added at the end of the coalition as the last vehicle.
- A6:
- The proposed algorithms execute on all the vehicles, assisting them in making decisions.
3.3. Proposed Utility Functions for Autonomous Vehicles
- 1.
- The function ought to integrate all the criteria to form a single metric to assess the benefits of joining a coalition .
- 2.
- Weighting co-efficients are assigned to each criterion involved in decision making to indicate its relative significance.
- 3.
- The inclusion of decision-making parameters is scenario dependent.
- 4.
- The characteristic of each modeled parameter is captured realistically.
- 5.
- Normalization is applied since the parameters are measured in different units. The normalization values span between the interval .
- : a Time to collate function that calculates the duration during which a intends to join a coalition.
- : a Gain function that computes the gain that a vehicle will achieve by traveling within a coalition .
- : a Cost function which calculates the cost that a incurs by joining .
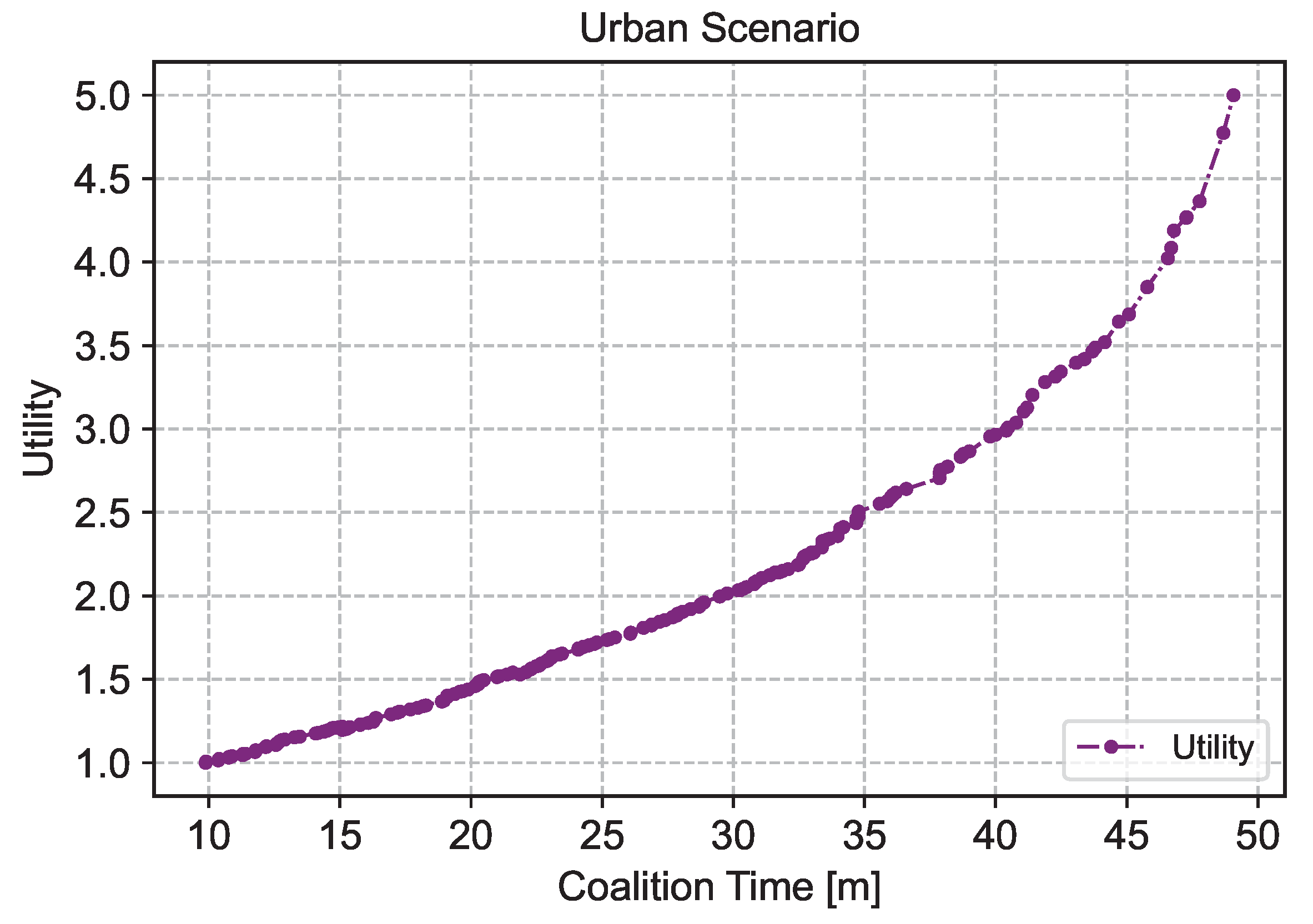
3.3.1. Time to Collate
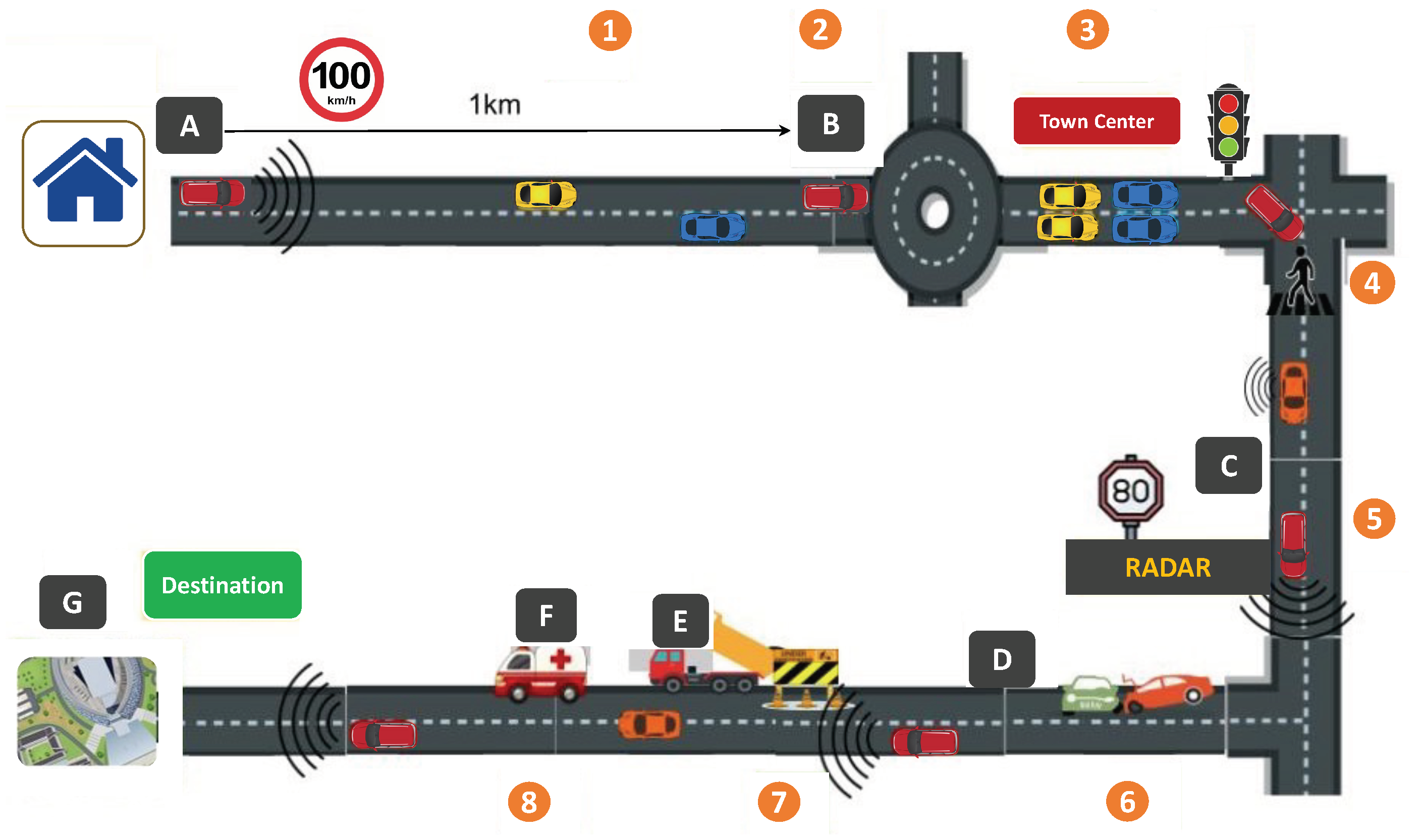
- Complexity of the Environment—The complexity of the environment for refers to the level of difficulty and diversity of the conditions, events, and obstacles that the vehicle encounters in its operation. This includes factors such as traffic flow, road conditions, weather, and pedestrian and cyclist presence, as well as the presence of other vehicles and infrastructure elements like traffic signals and signs. The environment in which travels, such as at intersections, junctions, and other high-traffic areas, plays an imperative role for in deciding on whether to form a coalition with other vehicles or not. These areas often require precise collaboration and communication among multiple vehicles to ensure safe and efficient navigation. Therefore, the must be able to evaluate the in its immediate vicinity to take an optimal decision of coalition formation.The traffic environment comprises various external factors that affect autonomous driving systems, such as road conditions, weather conditions, and the behavior of other traffic participants. However, these factors are subject to continuous or discrete variations within a certain range, resulting in an infinite number of potential traffic scenarios. Therefore, we believe that the complexity of the road traffic environment is an objective characteristic that primarily depends on the physical attributes of the environmental elements. These elements are broadly classified into two categories:
- 1.
- Static Element Complexity —This includes road sections, tunnels, signs, markings, plants, ancillary facilities, and other similar stationary environmental elements.
- 2.
- Dynamic Element Complexity—This refers to the environmental elements that are constantly in motion, such as vulnerable road users, vehicles, and non-motorized vehicles.
To compute the complexity of the current driving environment of , we adopt the equation from the research conducted by Cheng et al. [16]. The complexity of static and dynamic elements is weighted and summed to obtain the traffic environmental complexity as computed using Equation (6).where represents the complexity of the environment as determined by the and , while and are the respective weighting coefficients assigned to the and element complexities. The values of and have been set as 0.35 and 0.65, respectively.Furthermore, based on the values of computed from Equation (6), the traffic environment complexity for is quantified into different categories as shown in Equation (7). The explanation of these categories with their characteristics and examples is presented in Appendix A Table A1. - Estimated Time to Reach Destination—The estimated time to reach the destination of a vehicle is the amount of time t that it is expected to take for the vehicle to travel from its current location to its destination d, based on factors such as distance, speed, and any stops or delays along the way. The estimated travel time of to reach its d alone is computed using Equation (8).where is the time takes to reach the destination d alone; is the distance that the vehicle needs to cover to reach d; V it is the speed at which the travels; is the number of stops that the may make on the way to its destination d; and is the amount of time the spends at each stop.Calculating the is an important factor. For instance, if calculates its and determines that it will arrive at its d within a short period, it may not be beneficial for the to form a coalition. This is because the time saved by forming a coalition may not outweigh the additional cost of coordinating with other vehicles and modifying the vehicle’s route. In such cases, the vehicle may choose to continue on its own, potentially saving resources and time. Therefore, calculating helps the vehicle to make informed decisions regarding the formation of , taking into account the potential benefits and costs.
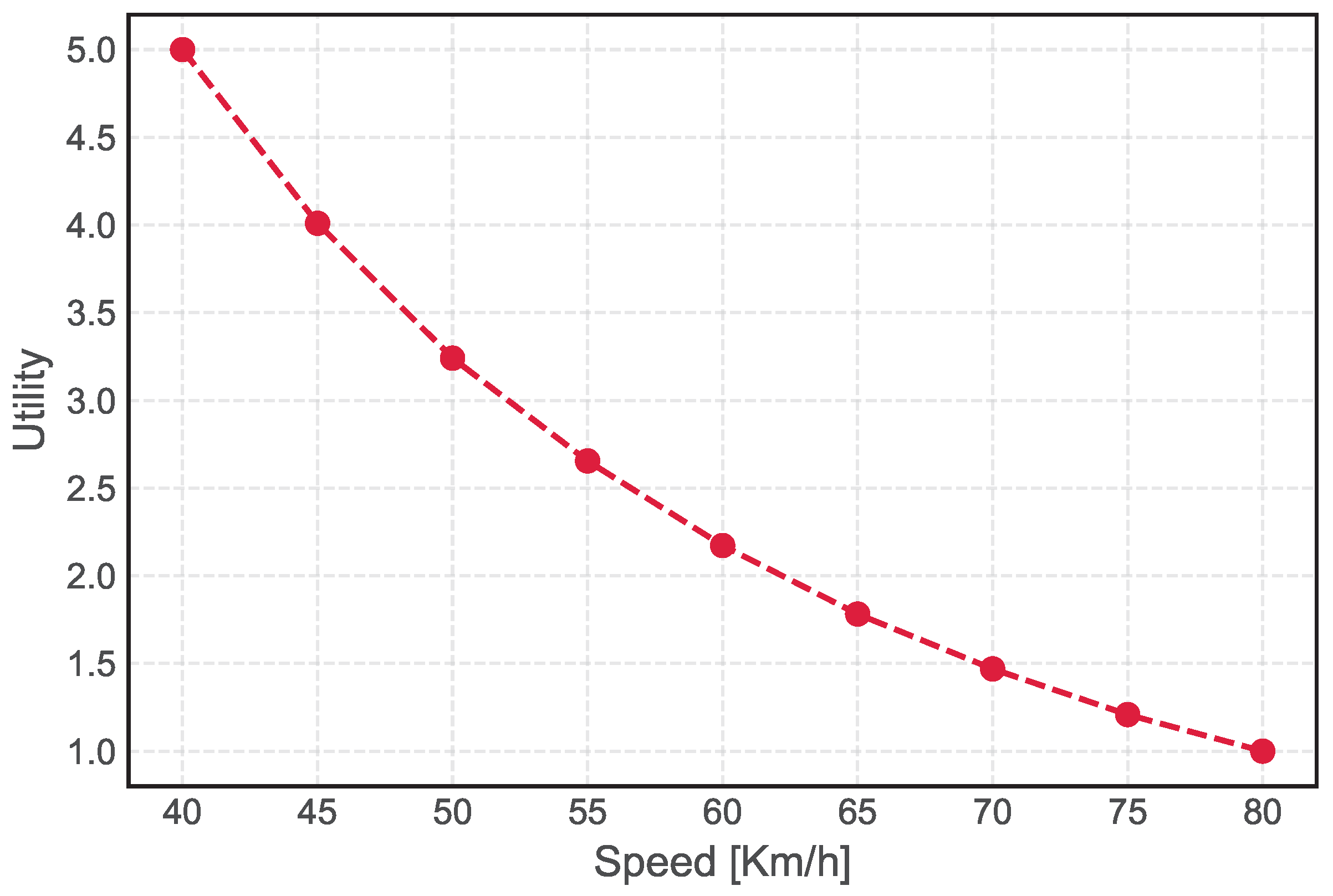
- Speed Difference—The speed difference between the and the coalition is computed using Equation (9). It determines the difference between the speed at which the desires to travel on the road and the speed V that is offered by to at which the of vehicles is currently traveling.where is the desired speed of vehicle ; is the speed offered by the coalition to ; is the minimum speed limit for ; and the is the maximum speed limit for . We assume that overall, the lower value of is better for . If the of is higher ( = 50 km/h) than the ( = 45 km/h), in this case the may not see the potential of being the part of since the offered V is less. However, if the of is lower ( = 40 km/h) than the ( = 50 km/h), then it may be desirable in certain ways for to be the part of the coalition as it can reach the destination quickly. Given this, it is also important for to consider fuel consumption and maintain safe and optimal driving conditions.
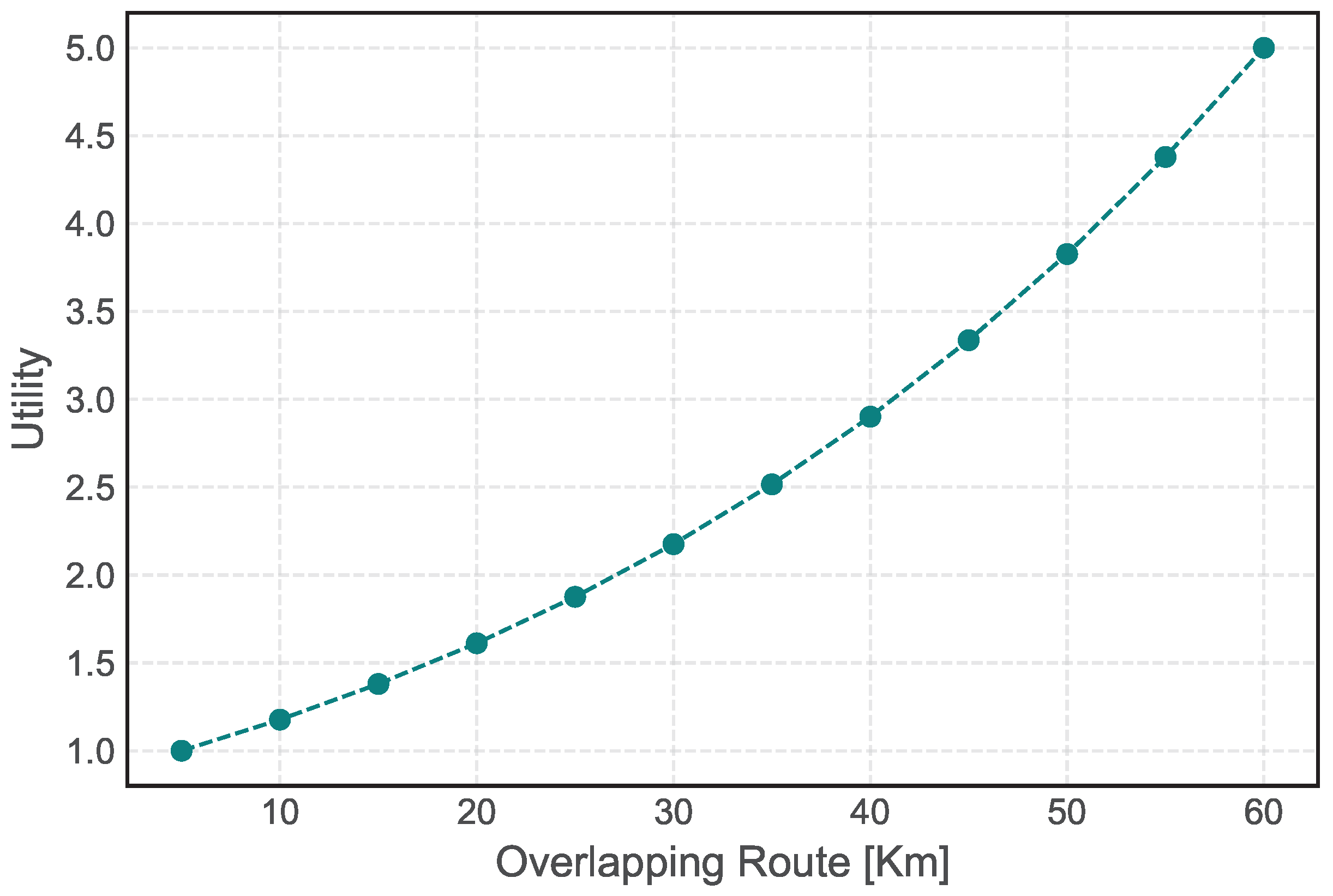
- Overlapping Route—The overlapping route refers to the route of length that the and the coalition can travel along towards the same direction by following the same path at the same time. In order to travel safely and efficiently in , all vehicles need to be synchronized and follow the same path.To compute the , the leverages a variety of sensors and communication technologies to collect and transmit information such as speed V, location , and the travel path with neighboring vehicles or the coalition if it is already formed. The intended travel path of and the path of are shared with each other, and similarities between the two paths are used to compute the of the road where their routes overlap.In urban scenarios, the overlapping route may only be a short distance before the vehicles diverge onto different paths. However, in highway scenarios, the overlapping route may cover a significant portion of the journey given the and other factors.
3.3.2. Gain Function
- 1.
- : calculates the fuel consumption of traveling alone and in a coalition.
- 2.
- : calculates the safety of traveling alone and in a coalition.
- 3.
- : computes the ride comfort of traveling alone and in a coalition.
- 4.
- : computes the travel time to destination of traveling alone and in a coalition.
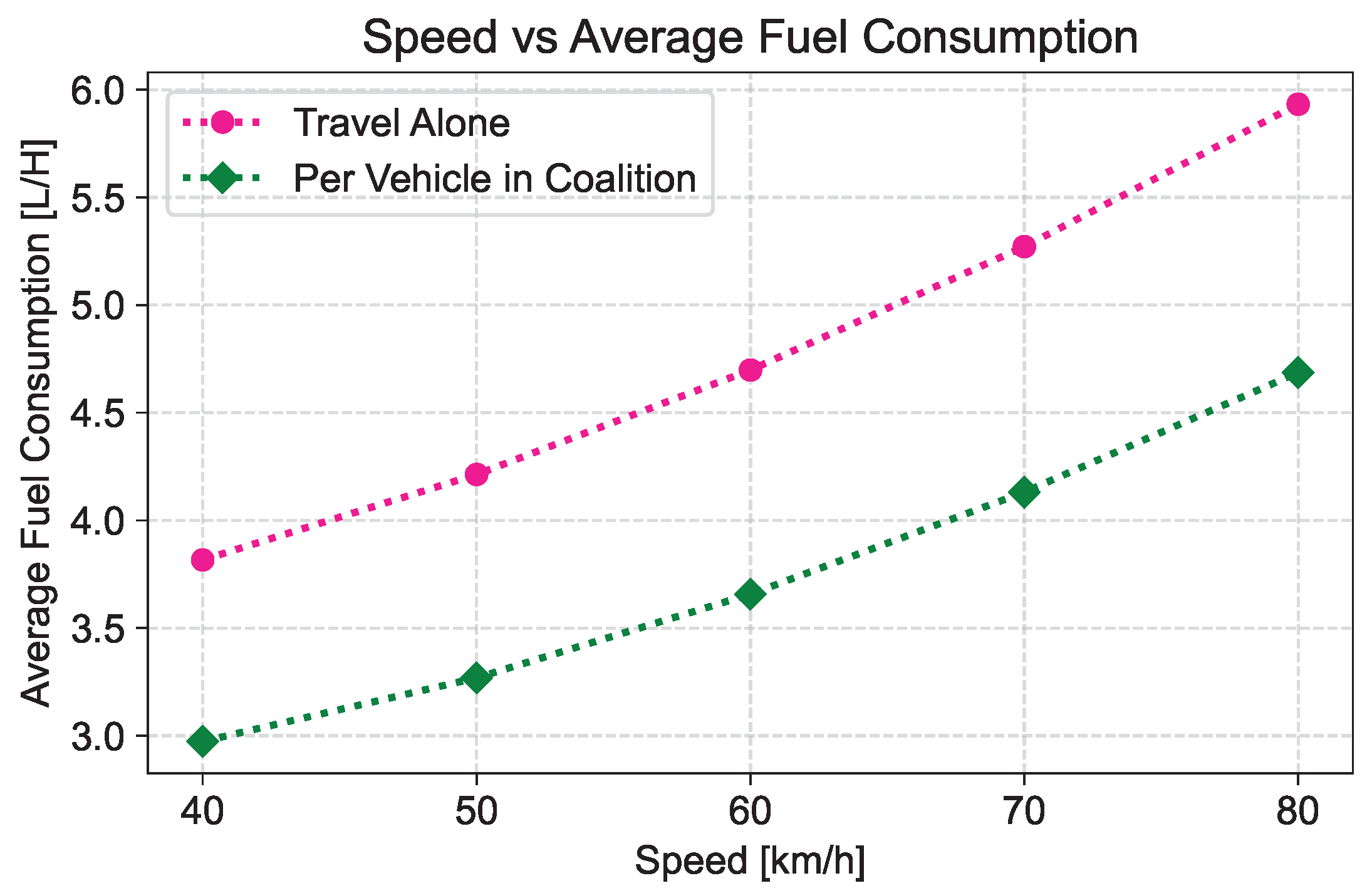
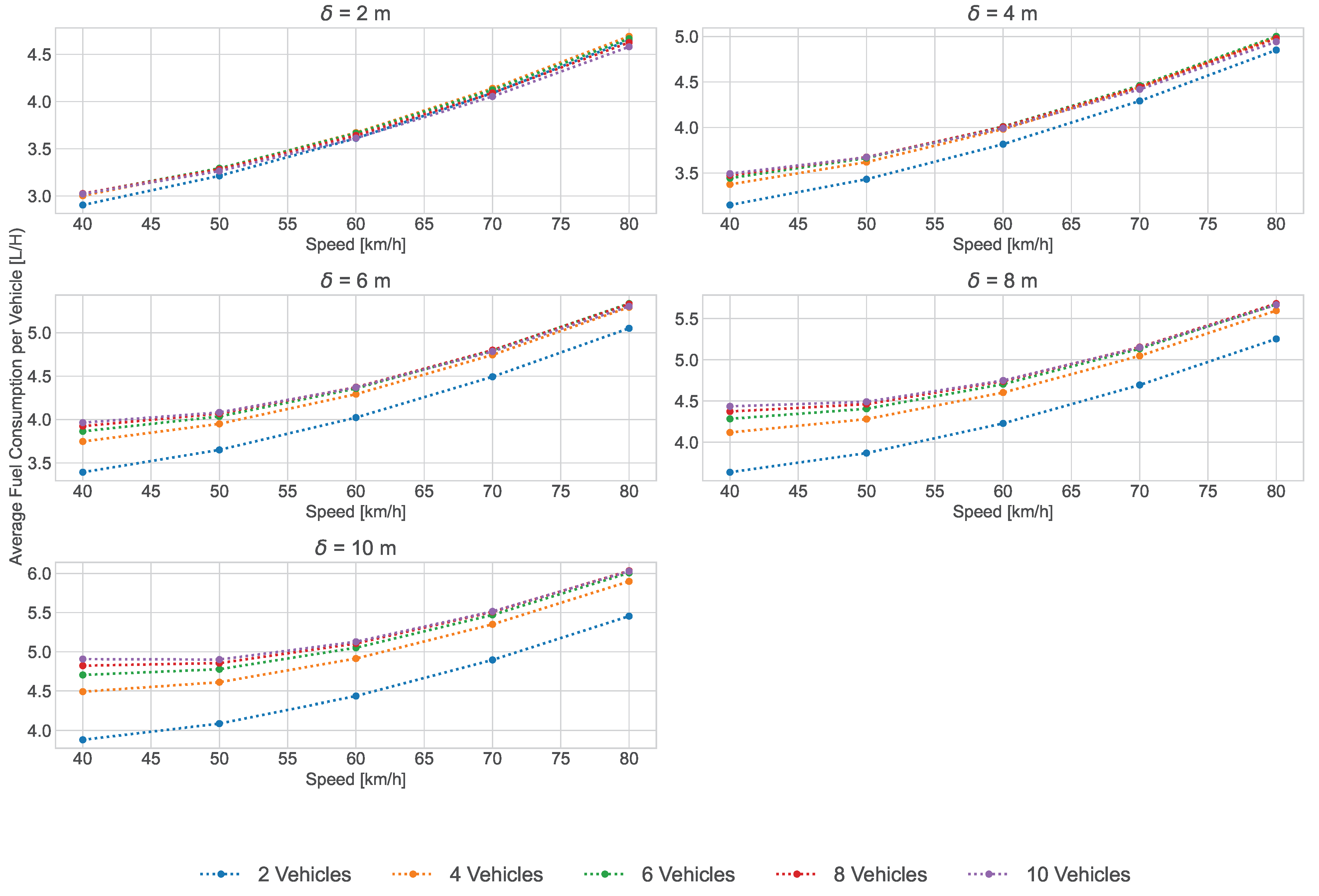
- Fuel Consumption: One of the main motivations for traveling in a coalition is saving a significant amount of fuel. Traveling in a can be more fuel efficient than traveling alone, especially for long journeys. This is due to the reduction in aerodynamic drag, which is one of the primary causes of fuel consumption at high speeds.A vehicle traveling alone creates a disturbance in the air around it, which results in a pressure difference between the front and the rear of the vehicle. This pressure difference causes aerodynamic drag force which opposes the forward motion of the vehicle. The magnitude of this drag force increases with the square of the vehicle’s speed V. Therefore, the faster a vehicle travels, the greater the aerodynamic drag force becomes.In contrast, when vehicles travel in a , the lead vehicle breaks through the air, creating a low-pressure zone behind it. The subsequent vehicles in the follow in the low-pressure zone, which reduces their aerodynamic drag. As a result, the following vehicles require less fuel to maintain their speed than if they were traveling alone.Several fuel consumption models have been studied in the literature to compute the fuel consumption of a vehicle such as the VT-micro model [17], MEF model [18], and ARRB model. In this research, we leverage a physics-based model to compute the fuel consumption of a vehicle traveling alone and in a . This model simulates the operation of a vehicle under different driving conditions, taking into account the effects of engine efficiency, aerodynamics, and road conditions. It relies on physics-based equations to calculate the forces acting on the vehicle and the resulting fuel consumption. We also model the aerodynamic drag component based on inter-vehicle distance and its effect on fuel consumption which is important in computing the fuel consumption of a coalition.1. Fuel consumption of a vehicle traveling alone—The steps to compute the fuel consumption of a vehicle traveling alone over distance are discussed below in detail:
- -
- Force due to air resistance The air resistance force is calculated using the drag coefficient , frontal area , air density , and speed of the vehicle V. The equation used to compute the air resistance force is shown in Equation (13).The and vehicle-specific parameters affect the aerodynamic drag on the vehicle. The is determined by the temperature, pressure, and humidity of the surrounding air.
- -
- Force due to rolling resistance: The rolling resistance force is calculated using the rolling resistance coefficient , the mass of the vehicle m, and acceleration due to gravity g. The equation used to calculate the rolling resistance force is discussed in Equation (14).
- -
- Total force: The total force acting on the vehicle is the sum of the air resistance force and the rolling resistance force . The equation used to calculate the total force is discussed in Equation (15).
- -
- Power output of the engine: The power output of the engine of a vehicle traveling alone is calculated by multiplying the total force by the speed V of the vehicle . The equation used to calculate the power output is shown in Equation (16).
- -
- Fuel consumption rate: The fuel consumption rate is calculated by dividing the by the product of the V, efficiency E, and lower heating value of the fuel. The equation used to calculate the is given in Equation (17).The efficiency E of the engine is the ratio of the useful output to the energy input (fuel energy). The of the fuel is the amount of energy released when the fuel is completely burned.
- -
- Total fuel consumption: Finally, the total fuel consumption of vehicle traveling alone for a distance of kilometers is calculated by multiplying the by the time t traveled. The equation used to calculate the total fuel consumption is given in Equation (18):
2. Fuel consumption of a vehicle traveling in a coalition—The steps to compute the fuel consumption of traveling in a coalition of vehicles over distance are discussed below in detail.- -
- Force due to air resistance: The air resistance force of a vehicle traveling in a is calculated using Equation (19) where is the speed V of the vehicle in the .
- -
- Force due to rolling resistance: The rolling resistance force is calculated using Equation (20) where m is the mass of the vehicle in the .
- -
- -
- Power output of the engine: The power output of the engine for each vehicle in the coalition is calculated. If the is the leading vehicle, then the power output is calculated as shown in Equation (22).If the vehicle is not the leading vehicle, then the power output of the following vehicle is calculated as Equation (23).where the parameters are as follows:: is the power output of the i-th following vehicle in the .: is the total force acting on the i-th following vehicle, which is the sum of the forces due to air resistance and rolling resistance.: is the speed of the i-th vehicle.is the speed of the leading vehicle.is the inter-vehicle distance between the i-th and -th vehicle.
- -
- Fuel consumption rate: The fuel consumption rate calculates the fuel consumption rate of each vehicle traveling in the by dividing the by the product of the , efficiency E, and of the fuel. The equation used to calculate the is given in Equation (24).
- -
- Fuel consumption of each vehicle in the coalition: Equation (25) calculates the fuel consumed by each vehicle in the .
- -
- Total fuel consumption of coalition: Finally, the total fuel consumption of all the vehicles in the for a distance of kilometers is calculated by multiplying the by the time t traveled. The equation used to calculate the total fuel consumption is given in Equation (26):
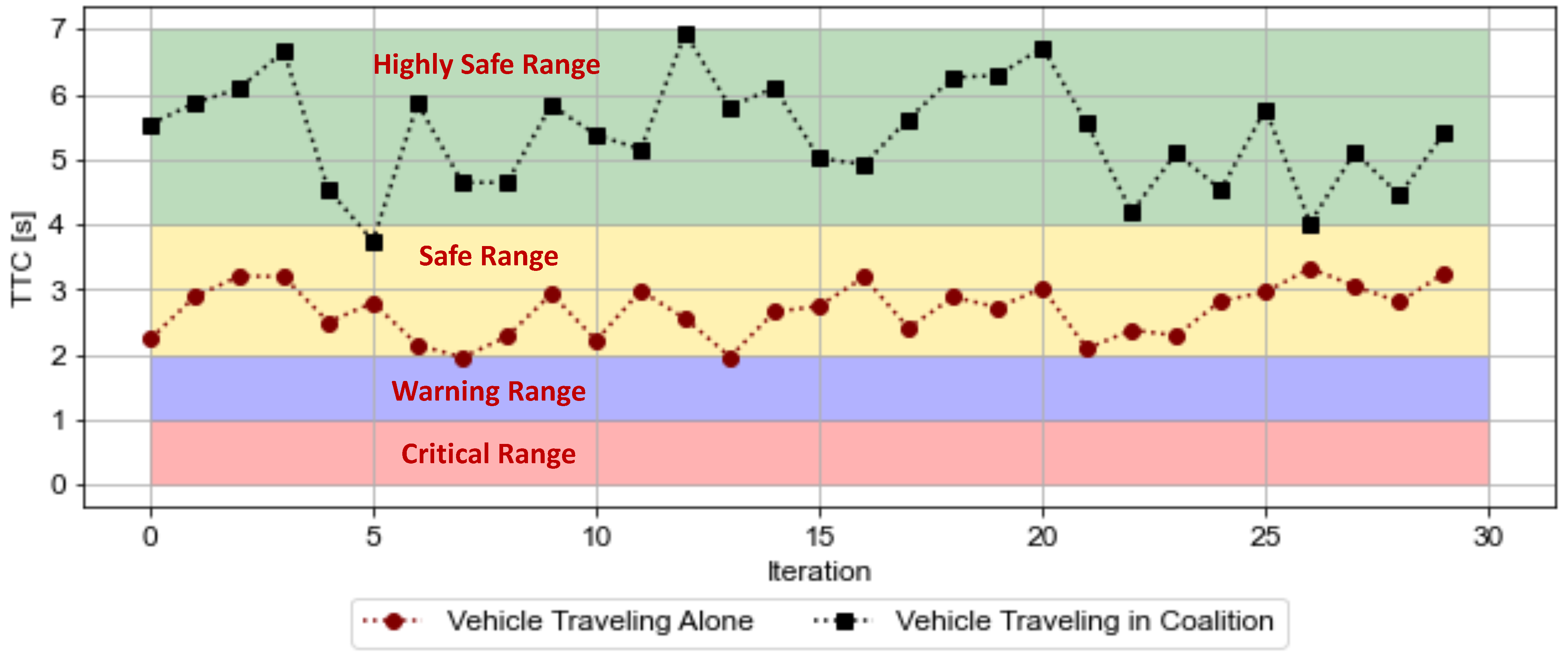
- Safety—In this research, we model the safety of the vehicle as the time-to-collision metric. Time to collision (TTC) is a widely used safety indicator in autonomous driving to evaluate the risk of a rear-end crash in real time and assess the safety of AVs by allowing the system to predict and avoid collisions.The TTC of a at time t is a measure of the time it will take for a to collide with another object, such as another vehicle, pedestrian, or obstacle if the current speeds and trajectories of the vehicles are maintained. In particular, the TTC indicates how much time a vehicle has to react and take evasive action to avoid a collision.In what follows next, we discuss the computation of TTC of a vehicle traveling alone and traveling in a in detail.1. Safety of a vehicle traveling alone—The TTC of a vehicle at time traveling alone is computed as shown in Equation (27).where are the positions of vehicle n and vehicle at time t, respectively; the are the speeds of vehicle n and vehicle at time t, respectively; and the is the length of the vehicle. The condition states that must be greater than , which ensures that the TTC is only calculated when the preceding vehicle is moving slower than vehicle n. If the preceding vehicle is moving faster than vehicle n, the TTC would be negative, which does not make sense in the context of collision avoidance.2. Safety of a vehicle traveling in a coalition—The TTC of a vehicle traveling in a is calculated similarly as calculated for the vehicle traveling alone. However, there are additional factors to consider, such as the inter-vehicle spacing between the vehicles in the coalition and the speeds at which the vehicles are traveling. The TTC of a vehicle n at time t traveling in a coalition is calculated as shown in Equation (28).where the calculates the TTC of vehicle in the at time t, is the headway which is the distance between the front of the vehicle in the and the rear of the lead vehicle at time t, is the speeds of lead vehicle and vehicle at time t, and is the length of the vehicle.Traveling in a can improve the TTC of a vehicle by reducing the and maintaining a constant speed, which decreases the chance of abrupt braking or acceleration. Contrarily, a vehicle traveling alone has to maintain a safe distance from the preceding vehicle to avoid collisions. However, this safe distance increases the gap between vehicles, which increases the TTC and reduces the traffic flow.Remark 1.A low TTC value indicates a higher risk of traffic crashes. To evaluate the safety of a vehicle, it is necessary to set a TTC threshold. Studies have recommended different TTC thresholds ranging from 1.5 to 5 s. However, Zhu et al. [19], experimented that a TTC threshold of 4 s is considered suitable for achieving good overall performance.
- Ride Comfort—It is an important factor to consider which refers to the overall smoothness and quality of the ride experience for passengers. One of the key factors that influence ride comfort is the jerk of the vehicle.Jerk refers to the sharpness or abruptness of the vehicle’s movements. When a vehicle undergoes sudden changes in acceleration, such as when it accelerates rapidly or comes to a sudden stop, the jerk is high. Research studies have shown that the level of discomfort experienced by passengers is directly related to the magnitude of the jerk. The higher the acceleration and jerk, the greater the discomfort. This is because sudden changes in velocity can cause the body to experience forces that are not expected, leading to discomfort.In what follows next, we discuss the ride comfort of a vehicle traveling alone and traveling in a coalition in detail.1. Ride comfort of a vehicle traveling alone—The jerk of a vehicle is the rate of change in its acceleration with respect to time. It is the third derivative of the vehicle’s position with respect to time. Mathematically, the jerk is defined as:where is the jerk; is the acceleration; is the rate of change in acceleration over t and is the third derivative of acceleration a with respect to t. To calculate the , we use the numerical differentiation methods, such as the gradient function in NumPy [20], to approximate the derivative of the a with respect to time t.2. Ride comfort of a vehicle traveling in a coalition—Generally, traveling in a coalition reduces the jerk and improves the smoothness of driving, as the vehicles are coordinated to move in a more synchronized manner. By following the lead vehicle closely and adjusting its speed and distance, the following vehicles can avoid sudden changes in acceleration or braking, which would result in higher jerks. However, there may still be some jerk present in the coalition, especially if there are abrupt changes in the lead vehicle’s speed. The level of jerk depends on the driving patterns and behavior of the lead vehicle.The steps to compute the jerk of a vehicle traveling in a are discussed below:
- -
- Compute the acceleration of the vehicle lead vehicle , respectively.
- -
- Calculate the relative acceleration of the vehicle with respect to the lead vehicle using Equation (30).
- -
- Calculate the jerk of the relative acceleration using Equation (31).where is the rate of change in the relative acceleration over time .
- -
- Calculate the total jerk of the vehicle traveling in a by adding the jerk of the relative acceleration to the jerk of the lead vehicle’s acceleration as presented in Equation (32).
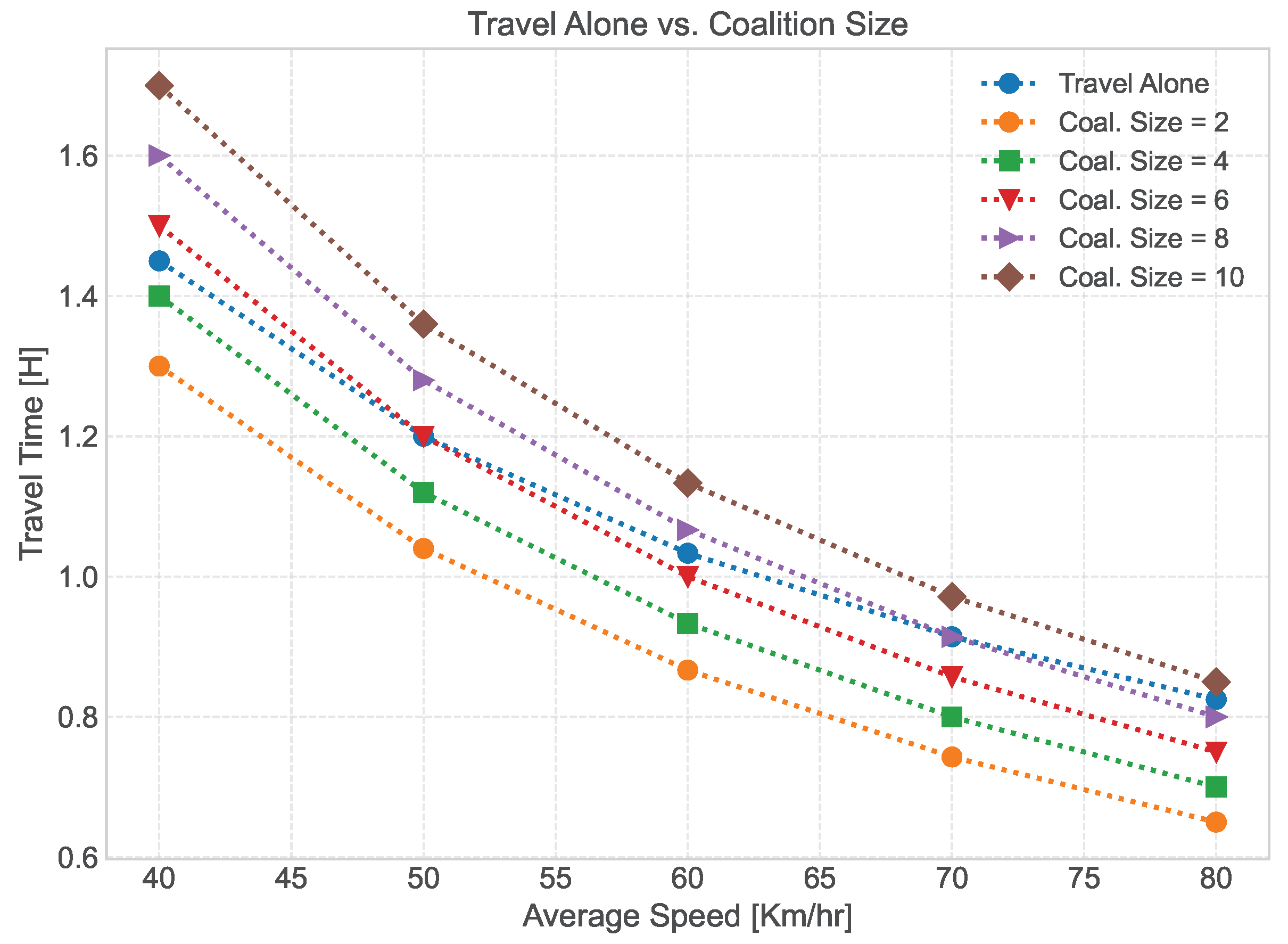
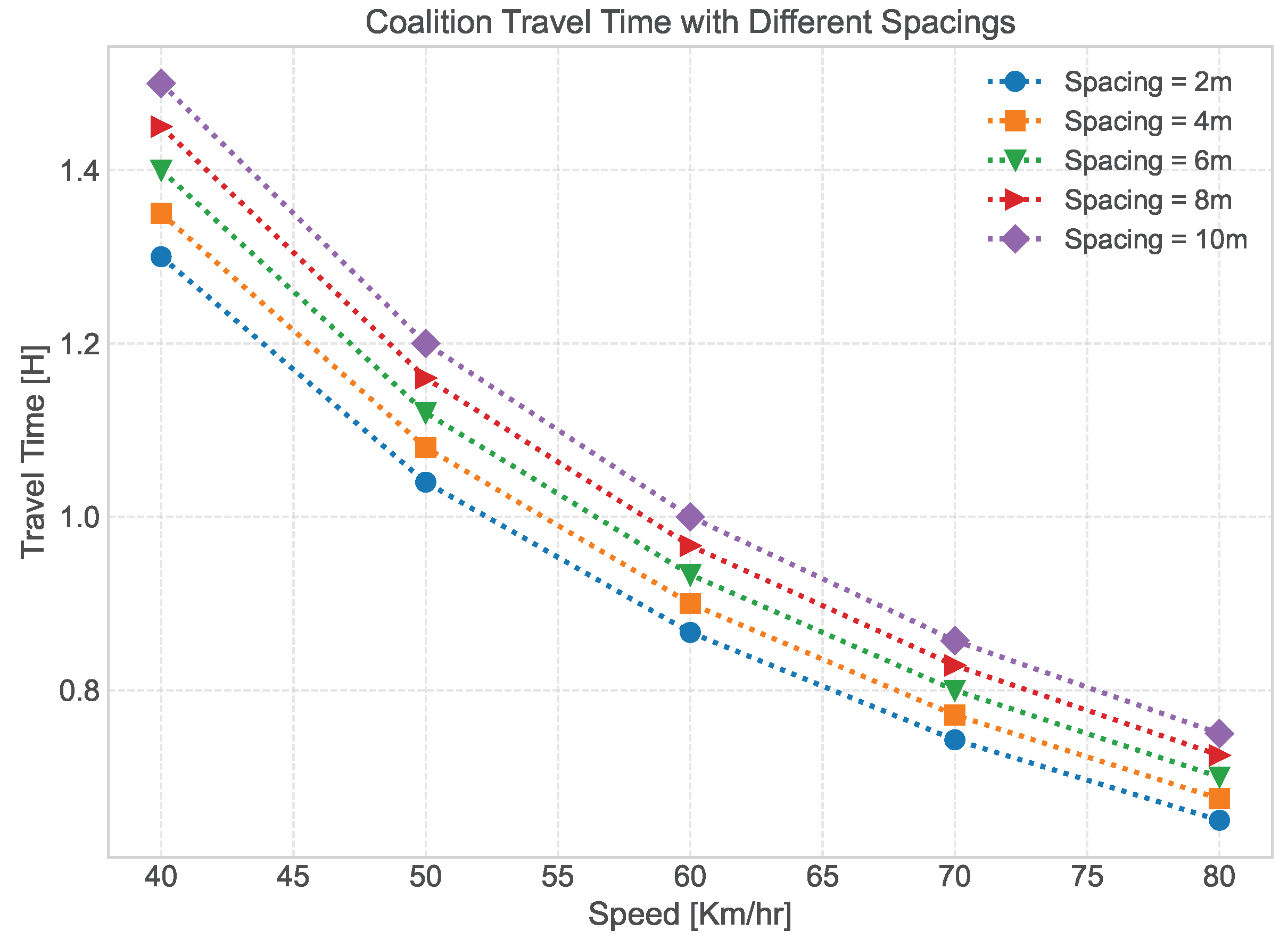
Remark 2.It is noteworthy that we assume that the acceleration data is continuous and differentiable. A high value of jerk indicates that acceleration a is changing rapidly, which can be uncomfortable for passengers. Therefore, the higher the acceleration and the jerk the greater the discomfort. Furthermore, the positive value of jerk means acceleration increases over time and the negative value of jerk is when the acceleration decreases over time. - Travel Time—Traveling in a coalition can be highly beneficial rather than traveling alone, as it can significantly reduce the time it takes to reach a destination d. This is because the inter-vehicle spacing between the vehicles in the can be smaller than the spacing required for individual vehicles traveling alone on the same route. By reducing the between the vehicles, the increases the flow of traffic, which ultimately leads to a shorter travel time. As a result, the vehicles reach d more quickly than they would have if traveling alone.In what follows next, we discuss the computation of the traveling time of a vehicle traveling alone and traveling in a .1. Travel time of a vehicle traveling alone—The estimated travel time of a vehicle to reach d traveling alone is calculated using Equation (8).2. Travel time of a vehicle traveling in a Coalition—The estimated travel time of a coalition of vehicles to reach the destination d is calculated by considering different parameters. The formula to compute the travel time of a coalition is presented in Equation (33).where the is the number of vehicles in the coalition ; is the inter-vehicle spacing between the vehicles in the ; is the average speed of the vehicles in the ; is the number of stops that the may make on the way to its destination d; and the is the amount of time the spends at each stop.The first part of Equation (33) computes the time taken to cover the distance by the of vehicles at the average speed . The second part of the equation calculates the additional time taken due to the stops made by the during the journey. The is added between the vehicles which strongly affects the time taken for the to reach the d. The smaller the is, the lesser the time will be taken to reach to d. However, it is noteworthy that we assume the vehicles in the maintain a constant speed and .
3.3.3. Cost Function
- 1.
- : the lane switching cost function which captures the cost that incurs while switching the lane(s) to join the .
- 2.
- : the coordination cost function that incurs to coordinate with .
- Lane Switching Cost—Lane switching cost of refers to the cost incurred by switching to a different lane in order to join the coalition . This cost is calculated based on various factors, such as the distance, the number of lane switches, and the risk of collisions.We model a piecewise function to compute the cost of to join a as presented in Equation (36). The function takes in two parameters, and , and returns a cost value based on the distance traveled and the number of lane switches.where the represents the distance needs to travel to switch lanes; represents the number of lane switches required for the ; a, b are coefficients for the linear component of the cost function, representing the cost per unit distance of changing lanes; and the K is the coefficient for the quadratic component of the cost function, representing the cost per unit distance squared of changing lanes.We believe that incorporating the lane-switching cost into the cost function would enable the vehicles to make more informed decisions about whether to join the or not considering the risk of switching lane(s).
- Coordination Cost—The coordination cost is considered as the cost incurred by a vehicle that desires to join a coalition of vehicles due to the need to coordinate its speed with that of the coalition . In particular, if the is traveling at a higher speed than the that desires to join, then the may need to increase its speed to match the speed of the , in order to join the coalition. This may result in additional fuel consumption and risk for the , which imposes a cost on the . Therefore, it is reasonable to consider the coordinating cost in terms of the speed difference between the and the .where the is the current speed of that desires to be a part of coalition and is the current speed of the .The value of is 0 if the is already the member of . This cost component takes into account practical considerations, such as the requirement to accelerate or decelerate to join a , and its value depends on various factors, including the speed difference between the current speed and the current speed of . Experimentally, we find the constant values between 0.05 and 0.1 to be adequate for .
3.4. Constraints
- 1.
- The constraint for coalition speed is . The value of is use-case specific and may vary in urban and highway scenarios.
- 2.
- The constraint for ride comfort is defined as .
- 3.
- The constraint for safety is given as .
- 4.
- The constraint for the coalition size is defined as . The value of varies in different scenarios and experiments.
4. Analysis of the Proposed Convoy Driving Game
4.1. The Shapley Allocation
- 1.
- Axiom 1 (Symmetric): For two players i and j who make the same contributions to every coalition in a game G, their Shapley values should be equal.∀⇒.
- 2.
- Axiom 2 (Dummy Player): It states that if a player does not contribute to any , their should be zero..
- 3.
- Axiom 3 (Additivity): It states that the of a player in a game G composed of multiple sub-games is equal to the sum of their Shapley values in each individual sub-game.
4.2. The Nucleolus
- 1.
- Efficiency: The imputation x must allocate the entire worth of the grand coalition .
- 2.
- Individual Rationality: Each player i should receive at least their individual worth for all .
- 3.
- Coalition Rationality: For any coalition , the worth allocated to should not exceed its worth .
- 4.
- Balanced Deviation: The minimizes the maximum dissatisfaction any player i can have with their allocation. Formally, for any player , the deviation dissatisfaction is defined as . The minimizes the maximum deviation dissatisfaction such that is minimized.
4.3. The Core
5. Coalition Implementation Strategies
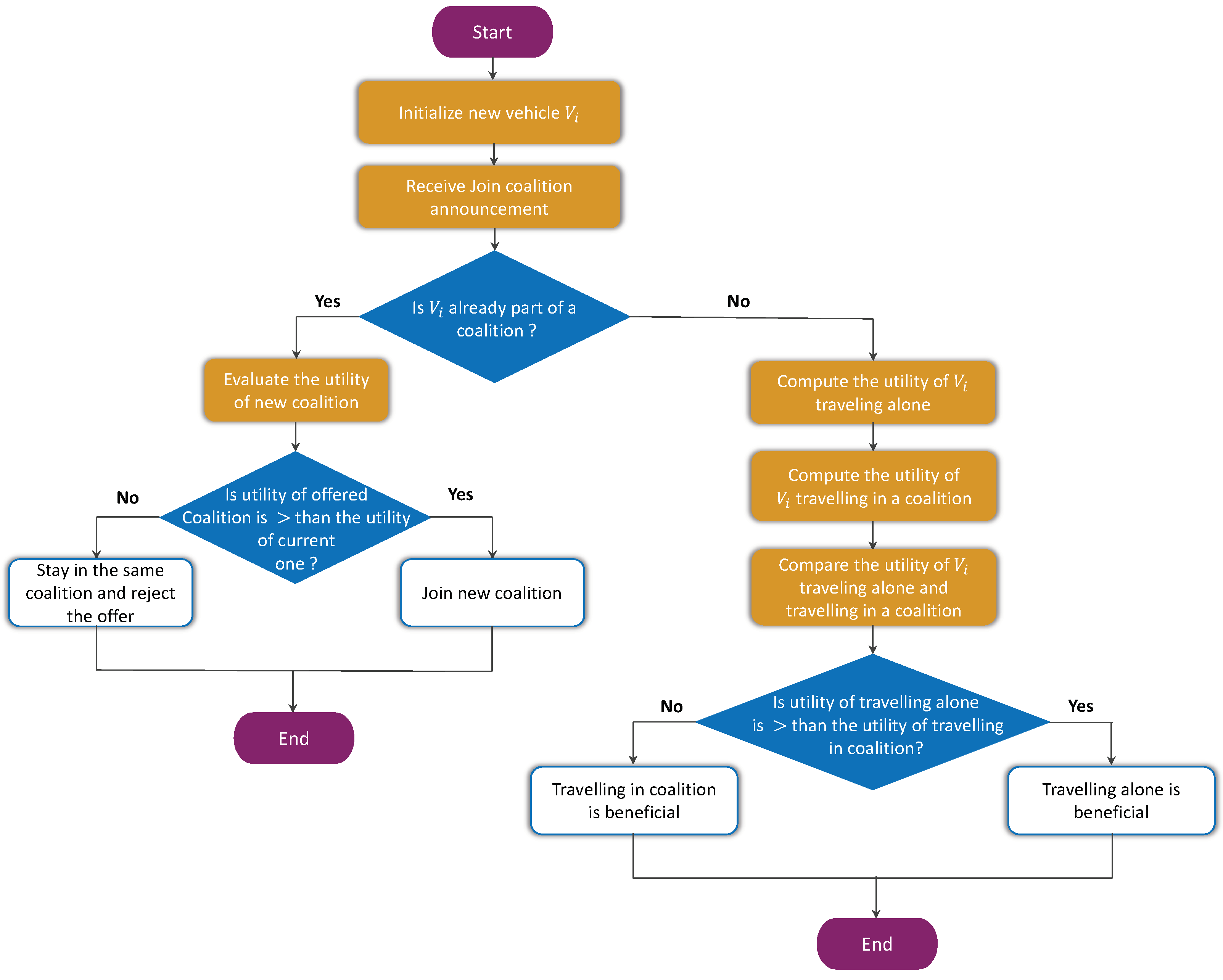
5.1. Traveling Mode Selection Decision-Making
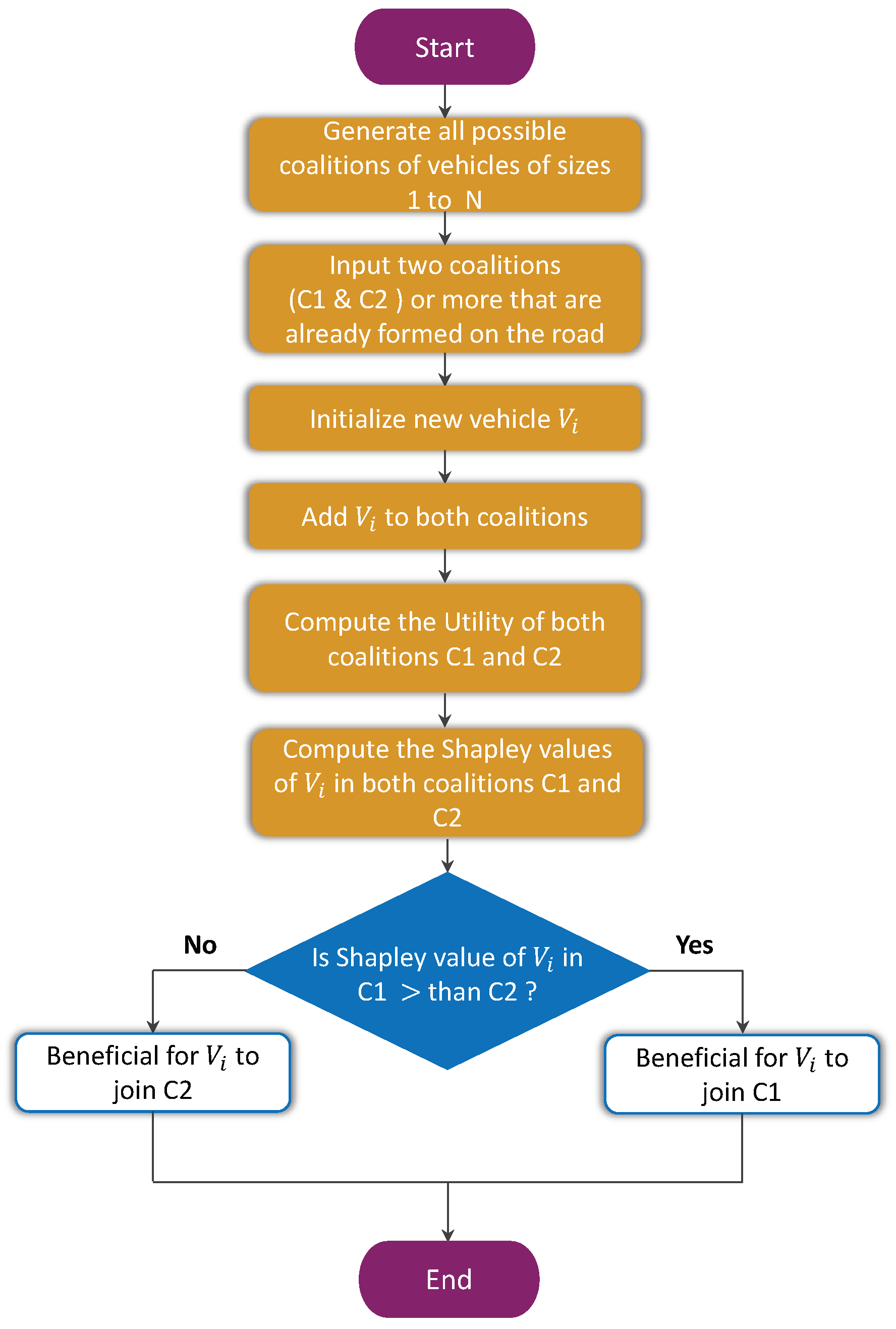
5.2. Optimal Coalition Selection Decision Making
| Algorithm 1 Traveling mode selection decision making |
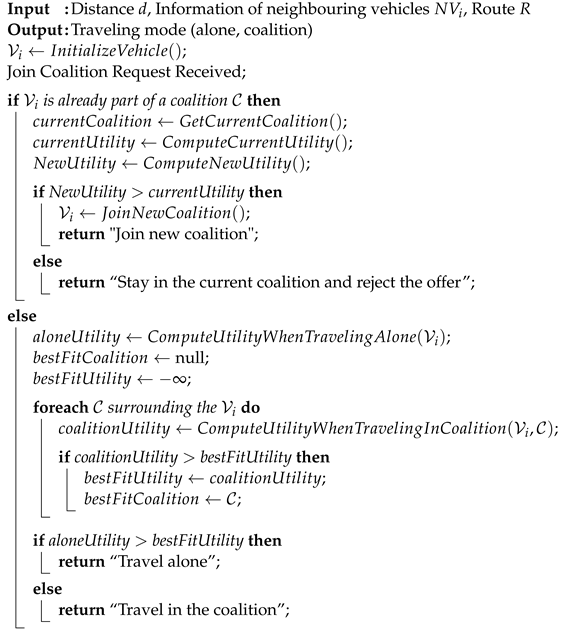 |
| Algorithm 2 Optimal Coalition Selection Decision Making |
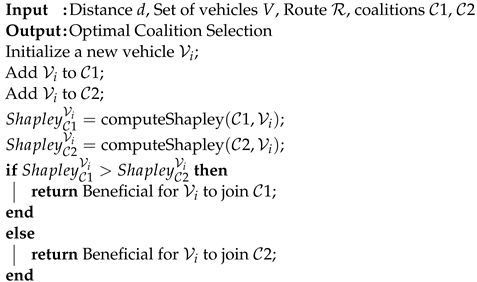 |
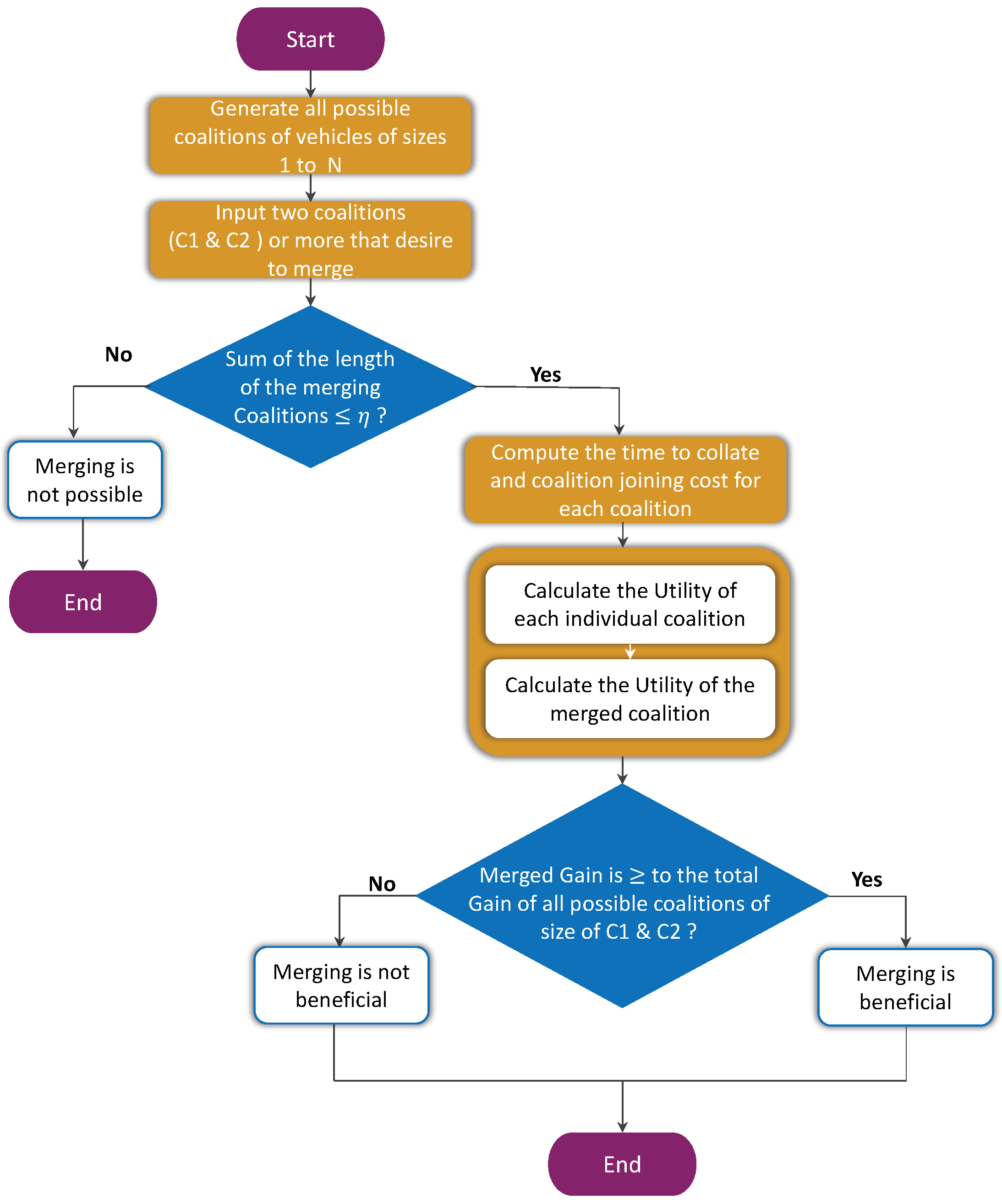
5.3. Coalition Merging Decision Making
| Algorithm 3 Coalition Merging Algorithm |
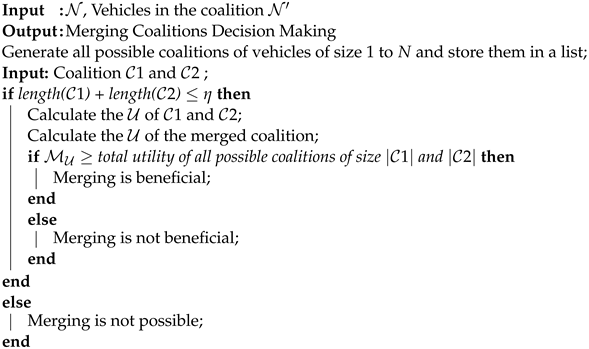 |
6. Numerical Experiments
6.1. Utility of Traveling in Coalition
6.2. Travel Time
6.3. Fuel Consumption
6.4. Safety
6.5. Comfort
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Notations
| Autonomous ego vehicle capable of sensing, communicating and coordinating | |
| Traveling mode of | |
| Time to collate | |
| Complexity of the environment | |
| Complexity of the static elements | |
| Complexity of the dynamic elements | |
| Weighting coefficient of static element | |
| Weighting coefficient of dynamic element | |
| Estimated time for to reach destination alone | |
| Current location of the vehicle or | |
| d | Destination of or |
| Distance that or needs to cover | |
| Number of stops that the may make on the way to its destination | |
| Amount of time the spends at each stop | |
| Coalition of vehicles | |
| Estimated time for to reach destination | |
| Total number of vehicles | |
| Number of vehicles in | |
| Inter-vehicle spacing between the vehicles in the | |
| Average speed of the vehicles in the | |
| Number of stops that the may make on the way to its destination | |
| Amount of time the spends at each stop | |
| Speed difference between the speed of and the speed offered by | |
| Desired speed of | |
| Speed offered by the coalition | |
| Minimum speed limit of | |
| Maximum speed limit of | |
| Overlapping route between and | |
| Length of road | |
| Traveling path of | |
| Neighboring vehicles | |
| Traveling path of | |
| ,,, | Weighting coefficients of |
| Lane switching cost | |
| If switches from current lane to other lane | |
| Distance needs to travel to switch lane(s) | |
| Number of lane switches required for the | |
| a, b | Coefficients for the linear component of the lane switch cost function |
| K | Coefficient for the quadratic component of the lane switch cost function |
| Coordination cost | |
| Current speed of | |
| Current speed of the | |
| Calculates the TTC of a vehicle n traveling alone at time t | |
| Calculates the TTC of a vehicle n traveling a coalition at time t | |
| Length of the vehicle | |
| Drag coefficient of traveling alone | |
| Vehicle front area | |
| Air density of traveling alone | |
| Air resistance force of traveling alone | |
| Rolling resistance force of traveling alone | |
| Rolling resistance coefficient of traveling alone | |
| m | Mass of the vehicle |
| g | Acceleration due to gravity |
| Power output engine of traveling alone | |
| E | Efficiency of the engine |
| Fuel consumption rate of traveling alone | |
| Total fuel consumption of traveling alone | |
| Drag coefficient of a vehicle traveling in | |
| Air density of a vehicle traveling in | |
| Air resistance force of a vehicle traveling in | |
| Rolling resistance force of a vehicle traveling in | |
| Rolling resistance coefficient of a vehicle traveling in | |
| Power output engine of the leading vehicle traveling in | |
| Power output engine of the following vehicle traveling in | |
| Fuel consumption rate of each vehicle traveling in | |
| Total fuel consumption of all the vehicle traveling in | |
| Acceleration of the vehicle | |
| Jerk of a vehicle traveling alone | |
| Jerk of a vehicle traveling in a a coalition | |
| Weighting coefficients of cost function | |
| New Coalition | |
| Utility | |
| Utility of vehicle i traveling alone | |
| Utility of vehicle i traveling in coalition | |
| Shapley value | |
| Core of the game G | |
| Nucleolus | |
| Merged utility of the coalitions |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category of | Characteristics | Example |
|---|---|---|
| Extremely Complex | Highly unpredictable and dynamic environment that requires a high level of perception, interpretation, and decision-making capabilities. | A busy downtown area with heavy traffic, pedestrians, bicycles, and unpredictable weather conditions. |
| More Complex | The dynamic environment with occasional unpredictable events. | Highway, or a suburban area with moderate traffic, multiple intersections, roundabouts, and different road surface conditions. |
| Average | A relatively stable environment that requires basic perception and decision-making capabilities. | A rural area with low traffic volume, straight roads, and predictable weather conditions. |
| Simple | A highly predictable and stable environment that requires minimal perception and decision-making capabilities. | A parking lot with few obstacles and minimal traffic. |
References
- SAE Levels of Driving Automation™ Refined for Clarity and International Audience. Available online: https://www.sae.org/blog/sae-j3016-update (accessed on 20 December 2022).
- Malik, S.; Khan, M.A.; Aadam.; El-Sayed, H.; Iqbal, F.; Khan, J.; Ullah, O. CARLA+: An Evolution of the CARLA Simulator for Complex Environment Using a Probabilistic Graphical Model. Drones 2023, 7, 111. [Google Scholar] [CrossRef]
- Malik, S.; Khan, M.A.; El-Sayed, H. Collaborative autonomous driving—A survey of solution approaches and future challenges. Sensors 2021, 21, 3783. [Google Scholar]
- Jeong, S.; Baek, Y.; Son, S.H. Distributed urban platooning towards high flexibility, adaptability, and stability. Sensors 2021, 21, 2684. [Google Scholar] [CrossRef] [PubMed]
- Kaluva, S.T.; Pathak, A.; Ongel, A. Aerodynamic drag analysis of autonomous electric vehicle platoons. Energies 2020, 13, 4028. [Google Scholar] [CrossRef]
- Hang, P.; Lv, C.; Huang, C.; Xing, Y.; Hu, Z. Cooperative decision making of connected automated vehicles at multi-lane merging zone: A coalitional game approach. IEEE Trans. Intell. Transp. Syst. 2021, 23, 3829–3841. [Google Scholar]
- Hang, P.; Lv, C.; Huang, C.; Hu, Z. Cooperative decision making of lane-change for automated vehicles considering human-like driving characteristics. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 6106–6111. [Google Scholar]
- Hang, P.; Huang, C.; Hu, Z.; Lv, C. Decision making for connected automated vehicles at urban intersections considering social and individual benefits. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22549–22562. [Google Scholar] [CrossRef]
- Bui, K.H.N.; Jung, J.J. Cooperative game-theoretic approach to traffic flow optimization for multiple intersections. Comput. Electr. Eng. 2018, 71, 1012–1024. [Google Scholar]
- Wei, H.; Mashayekhy, L.; Papineau, J. Intersection management for connected autonomous vehicles: A game theoretic framework. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 583–588. [Google Scholar]
- Calvo, J.A.L.; Mathar, R. Connected vehicles coordination: A coalitional game-theory approach. In Proceedings of the 2018 European Conference on Networks and Communications (EuCNC), Ljubljana, Slovenia, 18–21 June 2018; pp. 1–6. [Google Scholar]
- Zhang, Y.; Zhang, J. Design and optimization of cluster-based DSRC and C-V2X hybrid routing. Appl. Sci. 2022, 12, 6782. [Google Scholar] [CrossRef]
- Khan, M.A.; Boloni, L. Convoy driving through ad hoc coalition formation. In Proceedings of the 11th IEEE Real Time and Embedded Technology and Applications Symposium, San Francisco, CA, USA, 7–10 March 2005; pp. 98–105. [Google Scholar]
- Bouchery, Y.; Hezarkhani, B.; Stauffer, G. Coalition formation and cost sharing for truck platooning. Transp. Res. Part B Methodol. 2022, 165, 15–34. [Google Scholar] [CrossRef]
- Hadded, M.; Minet, P.; Lasgouttes, J.M. A game theory-based route planning approach for automated vehicle collection. Concurr. Comput. Pract. Exp. 2021, 33, e6246. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, Z.; Gao, L.; Zhao, Y.; Gao, T. Traffic risk environment impact analysis and complexity assessment of autonomous vehicles based on the potential field method. Int. J. Environ. Res. Public Health 2022, 19, 10337. [Google Scholar] [CrossRef] [PubMed]
- Rakha, H.; Ahn, K.; Trani, A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions. Transp. Res. Part D Transp. Environ. 2004, 9, 49–74. [Google Scholar] [CrossRef]
- Guang, H.; Jin, H. Fuel consumption model optimization based on transient correction. Energy 2019, 169, 508–514. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- numpy.gradient—NumPy v1.24 Manual. Available online: https://numpy.org/doc/stable/reference/generated/numpy.gradient.html (accessed on 2 May 2023).
- Ramezani-Khansari, E.; Nejad, F.M.; Moogeh, S. Comparing time to collision and time headway as safety criteria. Pamukkale Üniversitesi Mühendislik Bilim. Derg. 2020, 27, 669–675. [Google Scholar] [CrossRef]
- Jiang, Y.; Ren, T.; Ma, Y.; Wu, Y.; Yao, Z. Traffic safety evaluation of mixed traffic flow considering the maximum platoon size of connected automated vehicles. Phys. A Stat. Mech. Its Appl. 2023, 612, 128452. [Google Scholar] [CrossRef]

| Ref. | Coalition Game Type | Use Case/Objective | Coalition Composition | Coalition Implementation Strategies | Utility/Cost Function Parameters | Utility/Cost Function | Constraints | Assumptions | Solution Concept | Simulator/ Language | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Travel: Alone or Coalition | Merge/Split | Coalition Selection Decision | Shapley | Core | Nucleolus | Other | |||||||||
| [6] | Coalition Formation | Multi-lane merging scenario for CAV | CAVs | ✗ | ✗ | ✗ | Safety, comfort, and efficiency | Ride comfort, travel efficiency, and acceleration | - | ✓ | ✗ | ✗ | - | MATLAB/ Simulink | |
| [7] | Coalition Formation | Study of cooperative lane change decision-making issue of AVs. | AVs | ✗ | ✗ | ✗ | Safety, comfort, and efficiency | Safety, efficiency | - | ✗ | ✗ | ✗ | - | MATLAB/ Simulink | |
| [14] | Coalition Formation | Study of Coalition formation and cost-sharing for truck platooning from system-wide optimization perspective | Autonomous Trucks | ✗ | ✓ | ✗ | Traveling cost | - | Concavity | ✓ | ✓ | ✗ | - | Julia | |
| [8] | Fuzzy Coalition | Conflict management at unsignaled intersection | CAVs | ✗ | ✗ | ✗ | Driving safety, passing efficiency | Safety, efficiency, comfort, stability, and control | All vehicles are CAVs, motion states and position information can be shared with each other | ✓ | ✗ | ✗ | - | MATLAB/ Simulink | |
| [9] | Coalition Formation | Optimizing traffic flow at different intersections | AVs | ✗ | ✓ | ✗ | Waiting time of vehicles, number of Vehicles, passing in a certain time | - | Traffic light consists of two phases (Green & Red), each intersection has four directions and three lanes | ✗ | ✗ | ✗ | Nash equilibrium | Netlogo | |
| [10] | Coalitional Graph | Platooning of CAVs at the intersection aiming to enhance safety and intersection throughput | Lanes | ✗ | ✗ | ✗ | Likelihood of accidents, change in travel time, and cost of speed change | Throughput threshold | Traffic stream rate is > 0 for all lanes | ✗ | ✗ | ✗ | Nash equilibrium | - | |
| [11] | Coalition Formation | Platoon formation to optimize the traffic flow and safety in dense scenarios | AVs | ✗ | ✗ | ✗ | Distance, travel time, congestion tax | Communication | No sensor failure, AV has predefined initial position and final destination | ✓ | ✗ | ✗ | - | - | |
| [15] | Hedonic Coalition Formation | Platoon allocation and route planning for picking up and returning automated vehicles in shared transportation systems | Parked Vehicles | ✗ | ✗ | ✗ | Maximum time spent in the platoon, maximum distance between two parked vehicles, history of the player | Energy, and each vehicle should be picked up | Vehicles must return to same station, leader and followers consume equal energy for the same distance, players are rational | ✗ | ✗ | ✗ | Nash Stable | Java | |
| [13] | Coalition Formation | Convoy driving on the highway | Vehicles | ✗ | ✗ | ✗ | Current speed, desired speed, speed offered by coalition, minimum acceptable utility | - | 20-meter wireless transmitter range, 5 vehicles with varied speeds | ✗ | ✗ | ✗ | - | Motes Devices YAES simulator | |
| This paper | Coalition Formation | Convoy driving in the urban environment | AVs | ✓ | ✓ | ✓ | Discussed in the paper (Section 3.3) | Speed, safety ride comfort, and coalition size (Section 3.4) | Discussed in the paper (Section 3.2) | ✓ | ✓ | ✓ | - | Python | |
| Input | Unit | Value | Description |
|---|---|---|---|
| 0.1 | |||
| Km/h | 40–45 | Current speed | |
| Km/h | 45–50 | Desired speed | |
| Km/h | 50–55 | Coalition speed | |
| 0.6–0.8 | Environment complexity | ||
| 0.35 | |||
| 0.65 | |||
| 0.27 | Drag coefficient | ||
| (m) | 2 | Frontal area | |
| (kg/m) | 1.18 | Air Density | |
| m | (Kg) | 1200 | Mass of the vehicle |
| E | 0.35 | Efficiency | |
| (MJ/Kg) | 45 | Lower heating value | |
| 0.015 | Rolling resistance coefficient | ||
| 0.23 | Drag coefficient in coalition | ||
| (kg/m) | 1.2 | Air density of vehicle in coalition | |
| 0.01 | Rolling resistance coefficient in coalition | ||
| g | (m/s) | 9.8 | Gravity |
| Km | [2,4,6,8,10] | Inter-vehicle spacing | |
| a | 0.5 | ||
| b | 1.0 | ||
| K | 0.2 | ||
| 0.05–0.1 | |||
| m | 5 | Vehicle Length | |
| 0–4 | Number of lane switches | ||
| [2,4,6,8,10] | Number of vehicles in the coalition |
| Utility of vehicles traveling alone | ||||
| 3.0 | 3.2 | 4.0 | 3.34 | 3.9 |
| Shapley allocation of vehicles traveling in a coalition | ||||
| 4.36 | 4.59 | 5.0 | 4.44 | 4.91 |
| Utility value of vehicles traveling alone | ||||
| 3.0 | 3.2 | 4.0 | 3.34 | 3.9 |
| Nucleolus allocation of vehicles traveling in a coalition | ||||
| 4.36 | 5.0 | 4.33 | 3.89 | 4.71 |
| Stable Coalitions | |
|---|---|
| Coalition 1 | (, , ) |
| Coalition 2 (Grand) | (, , , , ) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malik, S.; Khan, M.A.; El-Sayed, H.; Khan, M.J. Should Autonomous Vehicles Collaborate in a Complex Urban Environment or Not? Smart Cities 2023, 6, 2447-2483. https://doi.org/10.3390/smartcities6050111
Malik S, Khan MA, El-Sayed H, Khan MJ. Should Autonomous Vehicles Collaborate in a Complex Urban Environment or Not? Smart Cities. 2023; 6(5):2447-2483. https://doi.org/10.3390/smartcities6050111
Chicago/Turabian StyleMalik, Sumbal, Manzoor Ahmed Khan, Hesham El-Sayed, and M. Jalal Khan. 2023. "Should Autonomous Vehicles Collaborate in a Complex Urban Environment or Not?" Smart Cities 6, no. 5: 2447-2483. https://doi.org/10.3390/smartcities6050111
APA StyleMalik, S., Khan, M. A., El-Sayed, H., & Khan, M. J. (2023). Should Autonomous Vehicles Collaborate in a Complex Urban Environment or Not? Smart Cities, 6(5), 2447-2483. https://doi.org/10.3390/smartcities6050111