
UAV Fleet as a Dependable Service for Smart Cities: Model-Based Assessment and Application

 , ,
, , 

Abstract
1. Introduction
1.1. Motivation
- Increasing diversity and intensiveness of their application, the necessity of implementation of different types of UAVs and UAV-based groups (swarms, flocks, fleets) to solve dynamical tasks for smart cities and critical infrastructures;
- The complication of the conditions for the use of drones and the growing influence of the physical and cyber information environment on the performance of tasks by drones;
- Implementation of artificial intelligence (AI) for supporting key functions of UAVs’ application (navigation, image recognition, the safety of flights, control and optimization of joint behavior of drones, and so on);
- The importance of establishing centralized maintenance, ensuring the reliability and availability of UAVs;
- The need to ensure a more efficient UAV application (reducing costs while maximizing reliability, minimizing time indicators, etc.) by the development of mathematical models and methods.
- Thus, the main challenges of UAVaaS improvement are:
- The systematic analysis of its development as a smart city service, the creation of a model basis for research, and enhancing application options considering the parameters of service requests, means of service, and complex environmental conditions;
- Providing dependability (reliability, availability, safety, and security) of UAVaaS in case of extending functions performed and UAV failures caused by different reasons, and trustworthy assessment of service indicators.
1.2. State-of-the-Art
1.3. Aim and Objectives
- To formulate the principles of building, modeling, and implementing a UAV Fleet as a Dependable Service (UAVFaaDS) for a Smart City;
- To specify dependability issues (analysis and assessment) for UAVFaaS for a Smart City including a taxonomy of UAV and UAVF failures caused by equipment faults and attacks on assets;
- To develop and explore queueing-theory-based models of UAVFaaDS for a Smart City;
- To describe and analyze two cases of UAVFaaDS for a Smart City.
2. Approach and Methodology
2.1. Concepts of UAVF as a Dependable Service
- (a)
- A UAV fleet is a set of different UAVs, which is described by formula:
- (b)
- A UAV fleet provides a set of services {SSerq, q = 1, …, e}, which are a subset of the main services of a smart city, and is a part of the general city UAV fleet (GUAVF) formed for providing of targeted services.
- (c)
2.2. Dependability of UAV Fleet
- Reliability is defined by continuity of correct service(s) delivered by drones or UAVF during the required time;
- Availability is described as the readiness of drones or the UAVF to deliver correct service(s) at any time;
- Maintainability describes the ability of drones or the UAVF to undergo modifications, recharges, and repairs considering time limitations for delivery of services;
- Safety is defined by the absence of negative/critical consequences on the customers, the environment, and other systems in process of service delivery by drones or UAVF;
- Security is described by a set of attributes of integrity, confidentiality, and accessibility. Integrity is a key attribute and is defined by the absence of improper alterations for on-board drone systems and IT infrastructure of UAVF (systems ISC, ISM). Confidentiality and accessibility are abilities to protect the cyber assets of UAVF against unauthorized access and to assure access for authorized customers.
- Physical faults, which lead to persistent or short-term failures of drones and station hardware;
- Design faults caused by erroneous actions during the specifying system and software requirements, development, and verification. Such faults are the most typical reasons for failures for software or firmware of drones and UAV IT infrastructure;
- Interaction faults and failures caused by them, which are the result of the influence of external physical influences and cyber intrusions/attacks on drones and UAVF hardware and software vulnerabilities.
- IMECA-based analysis of Internet of Drones vulnerabilities and choice of countermeasures to minimize risks of successful cyberattacks [45];
- Sensor, communication, and data processing diversity of UAV-based systems [46];
- Strategies of UAVF maintenance including charging, recharging, and recovery after failures caused by different faults and influences.
3. Queueing-Theory-Based Models of UAVFaaDS
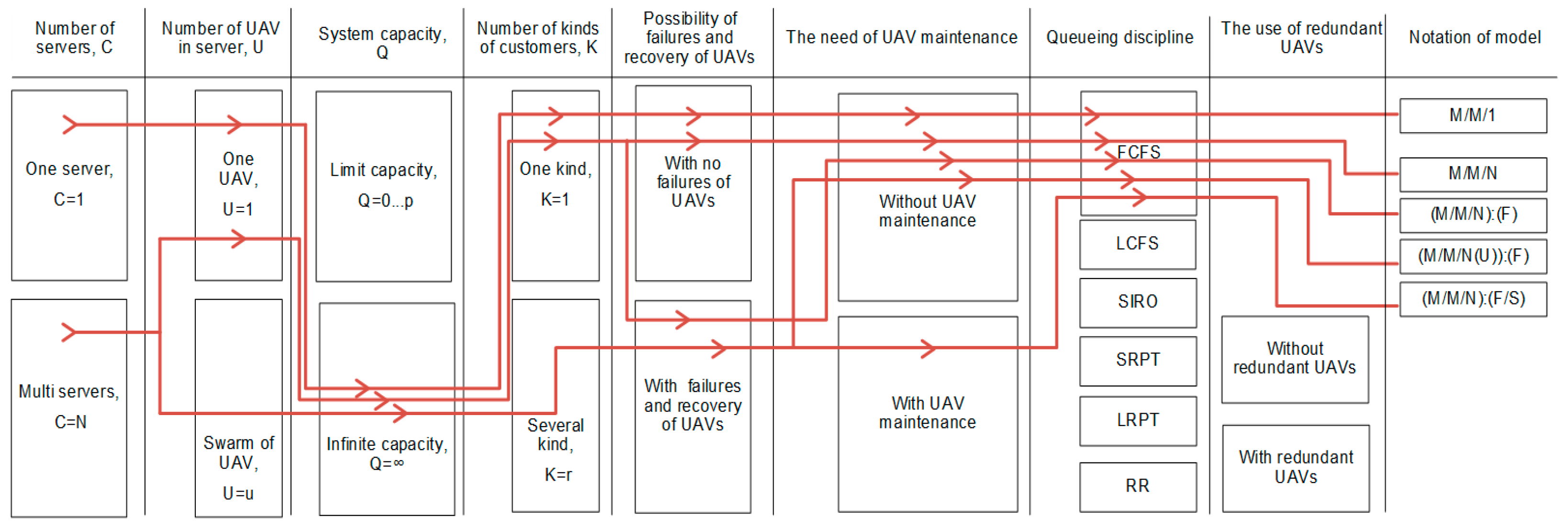
3.1. Classification of Queueing-Theory-Based UAVFaaDS Models
- Models without loss of customers;
- Models with loss of customers due to UAV failures.
- UAVs and UAV swarms are considered as the servers;
- Different kinds of customers may require different configurations of servers: one UAV is enough to deliver cargo, but a UAV swarm is needed for monitoring missions, or, if it is necessary, for deploying a flying wireless network;
- Considered queueing systems have unlimited recovery;
- Maintenance of UAVs is conducted during customer servicing;
- Redundant UAVs are used to change the failed ones.
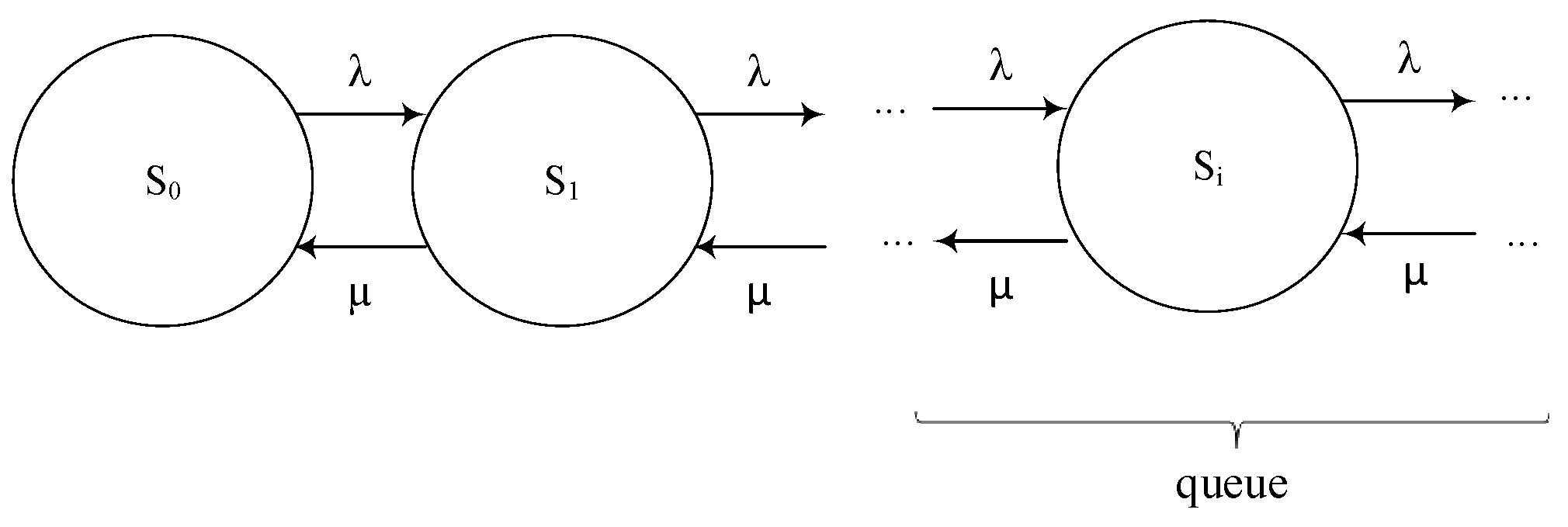
3.2. M/M/1 Model of UAVaaS
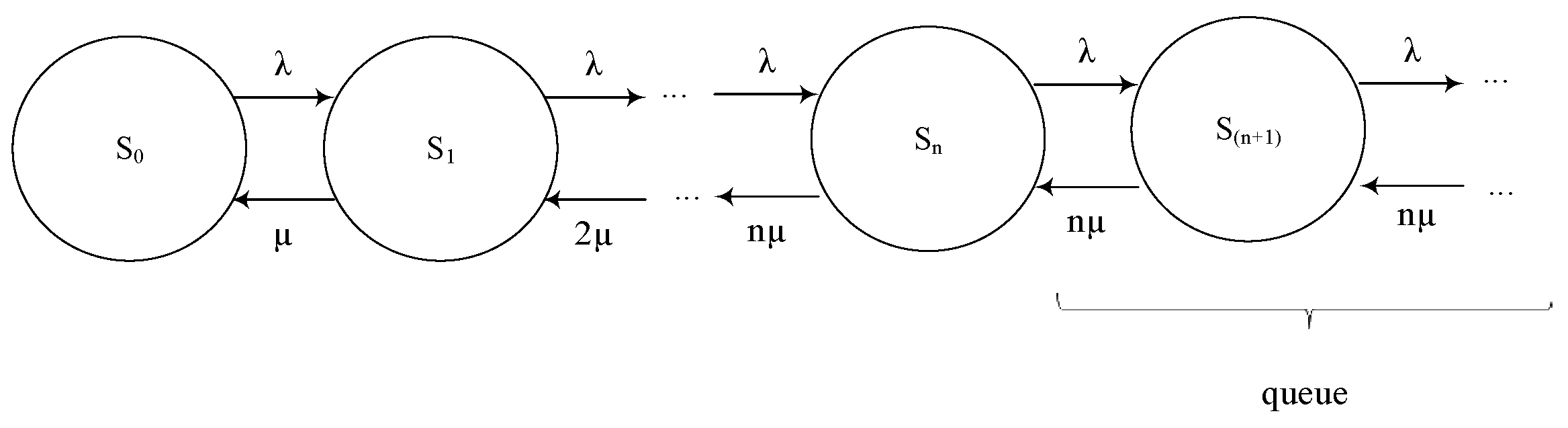
3.3. M/M/N Model of UAVaaS
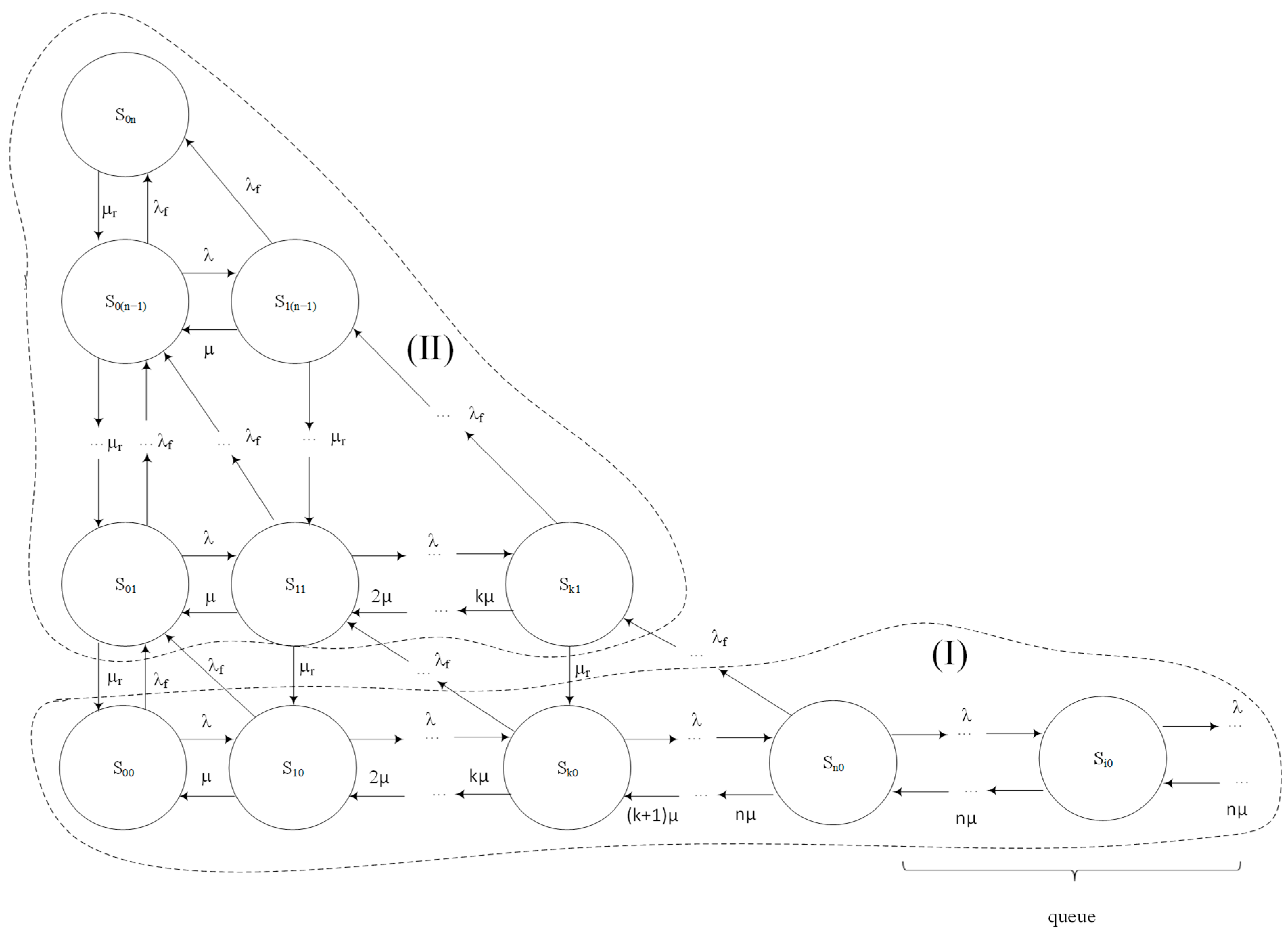
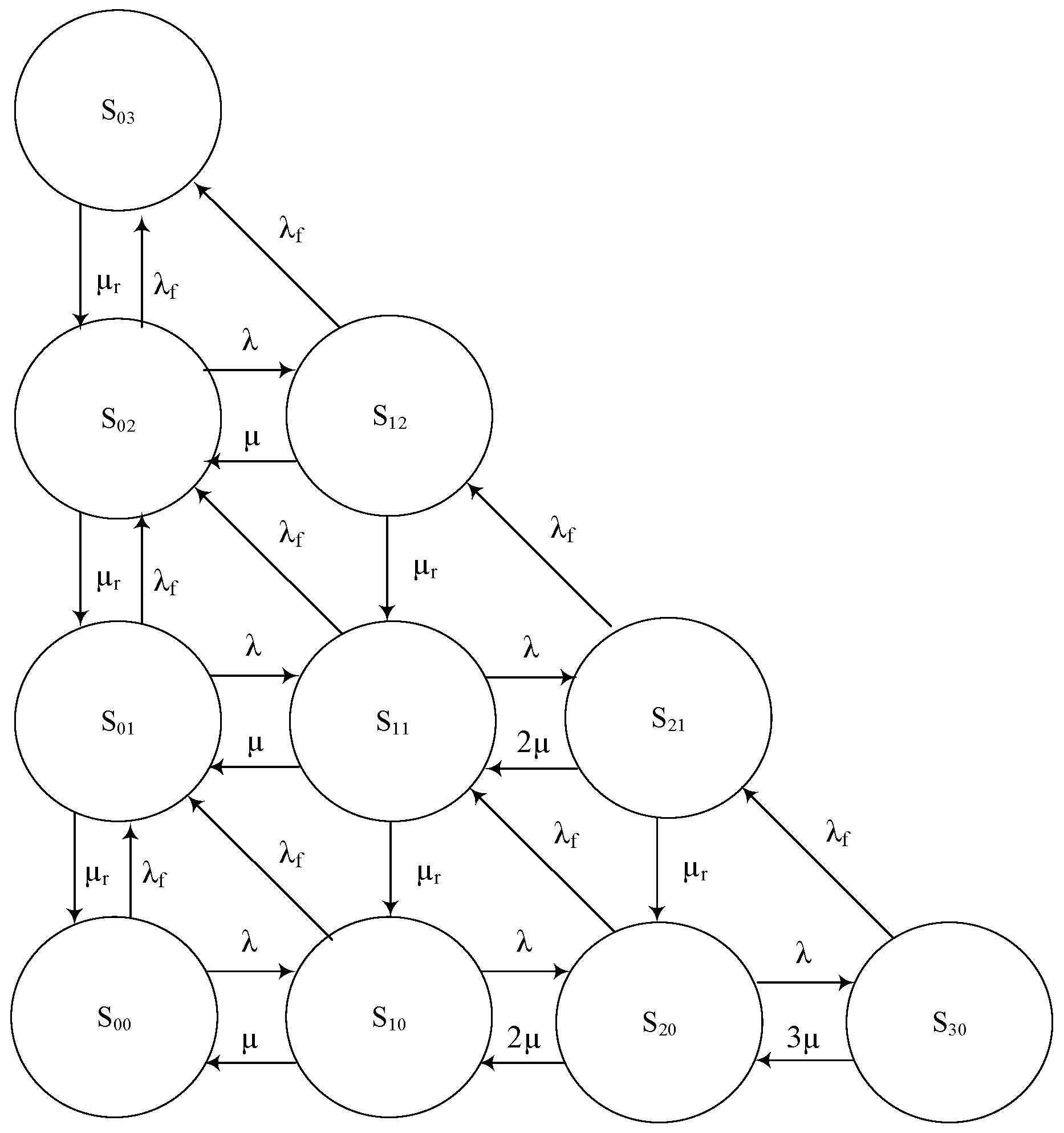
3.4. (M/M/N):(F) Model of UAVaaS
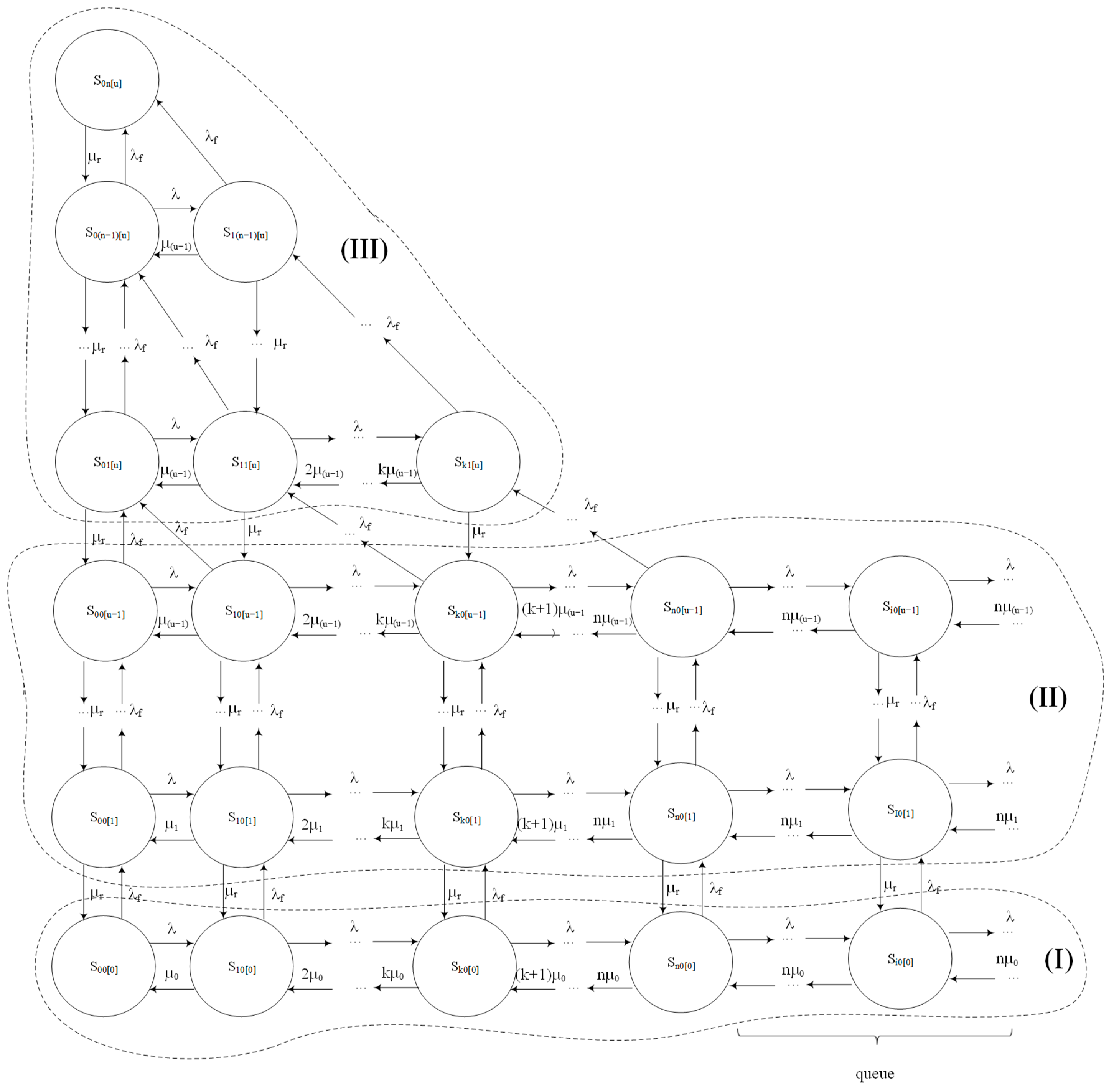
3.5. (M/M/N[U]):(F) Model
- The set (I) contains the states describing the operation of the queuing system (UAVFaaDS) with operable UAVs;
- The set (II) contains states describing the operation of the queuing system (UAVFaaDS) with non-operable UAVs in the swarm for cases when UAVs’ faults do not result in the loss of customers;
- The set (III) contains states describing the operation of the queuing system (UAVFaaDS) with non-operable UAVs for cases when UAVs’ faults result in the loss of customers.
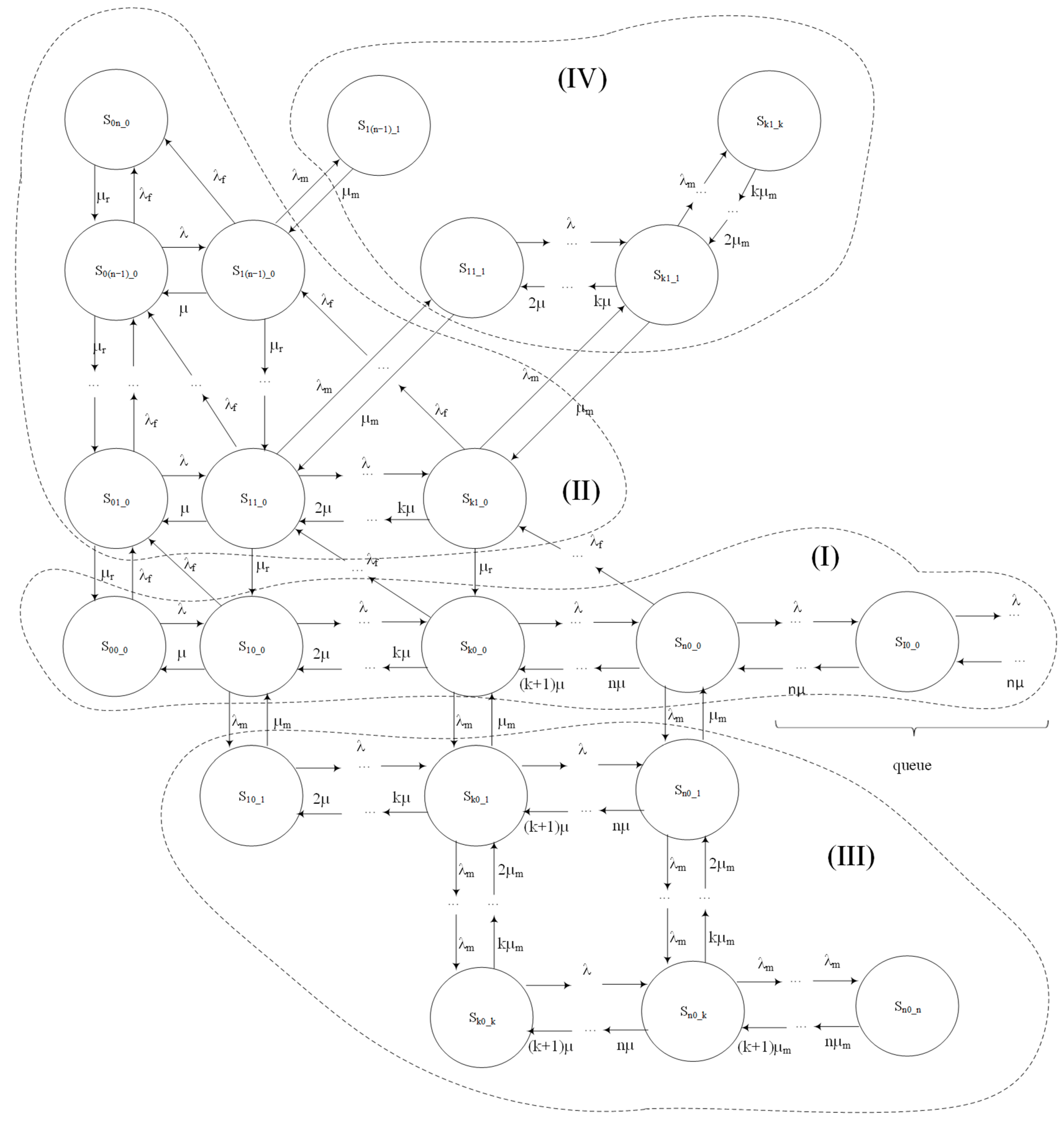
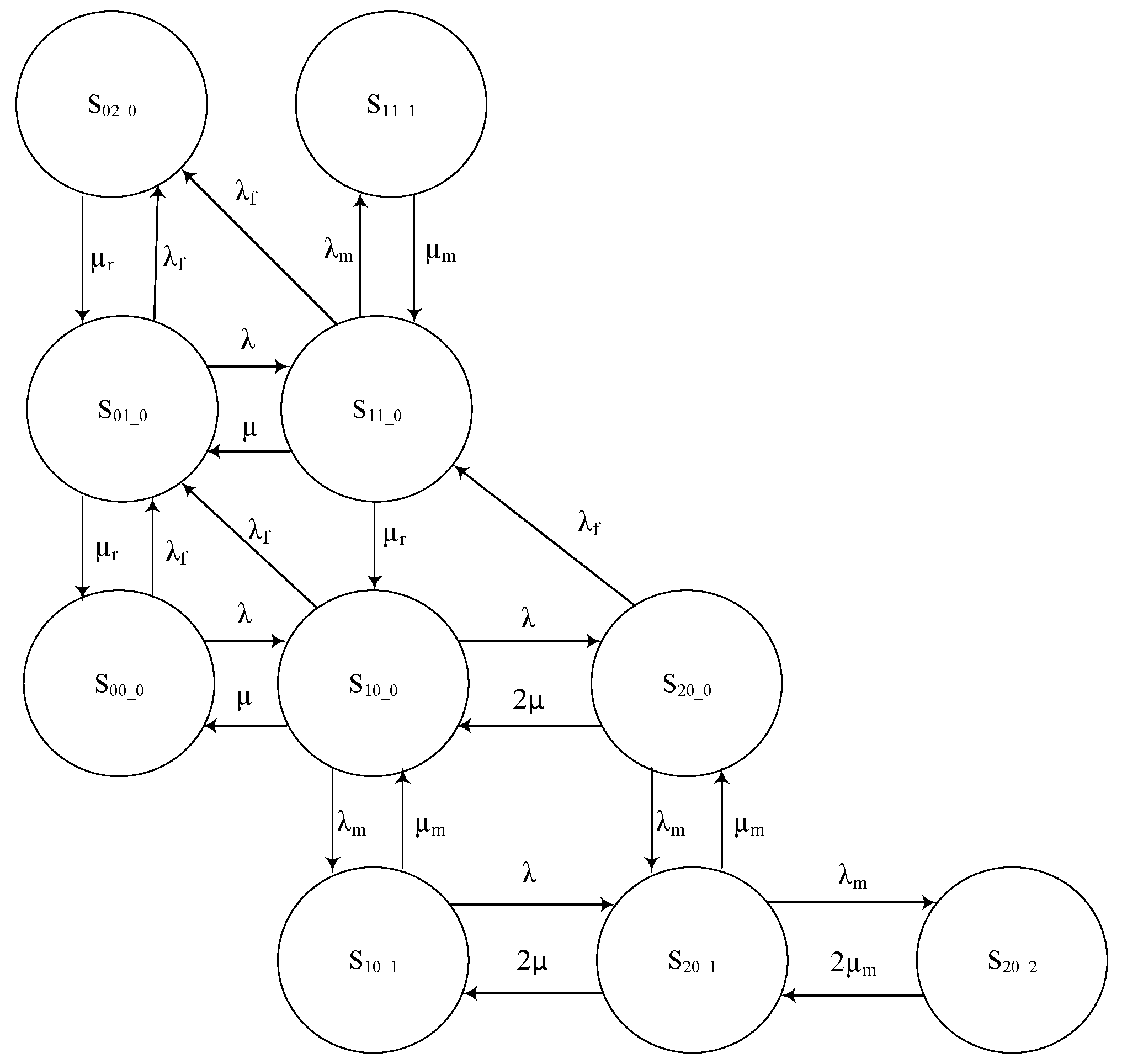
3.6. (M/M/N):(F/S) Model
- The set (I) contains the states describing the operation of the queuing system (UAVFaaDS) with operable UAVs;
- The set (II) contains states describing the operation of the queuing system (UAVFaaDS) with non-operable UAVs;
- The set (III) contains the states describing the queuing system (UAVFaaDS) with the UAVs under maintenance;
- The set (IV) contains states describing the operation of the queuing system (UAVFaaDS) with both non-operable UAVs and UAVs under maintenance.
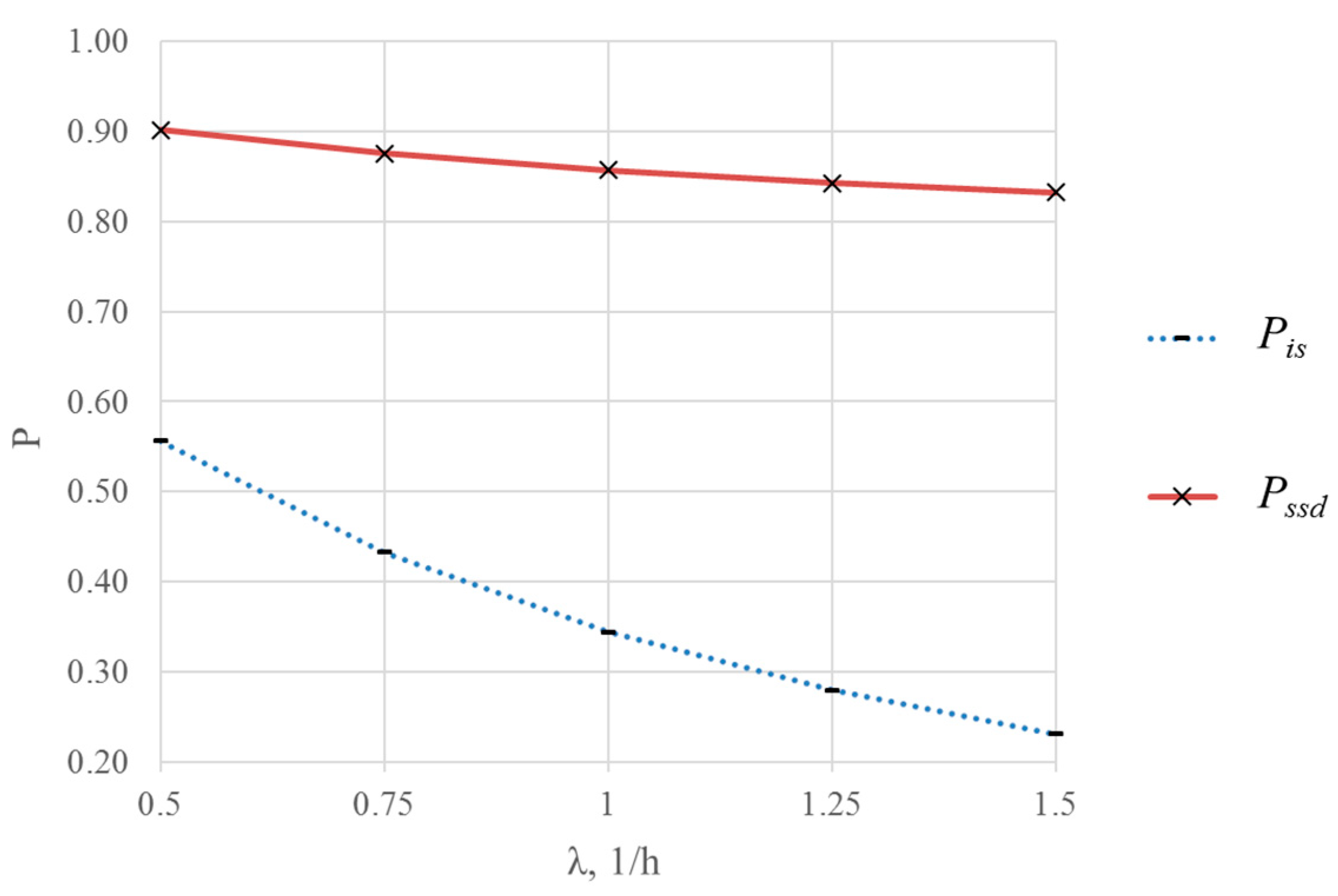
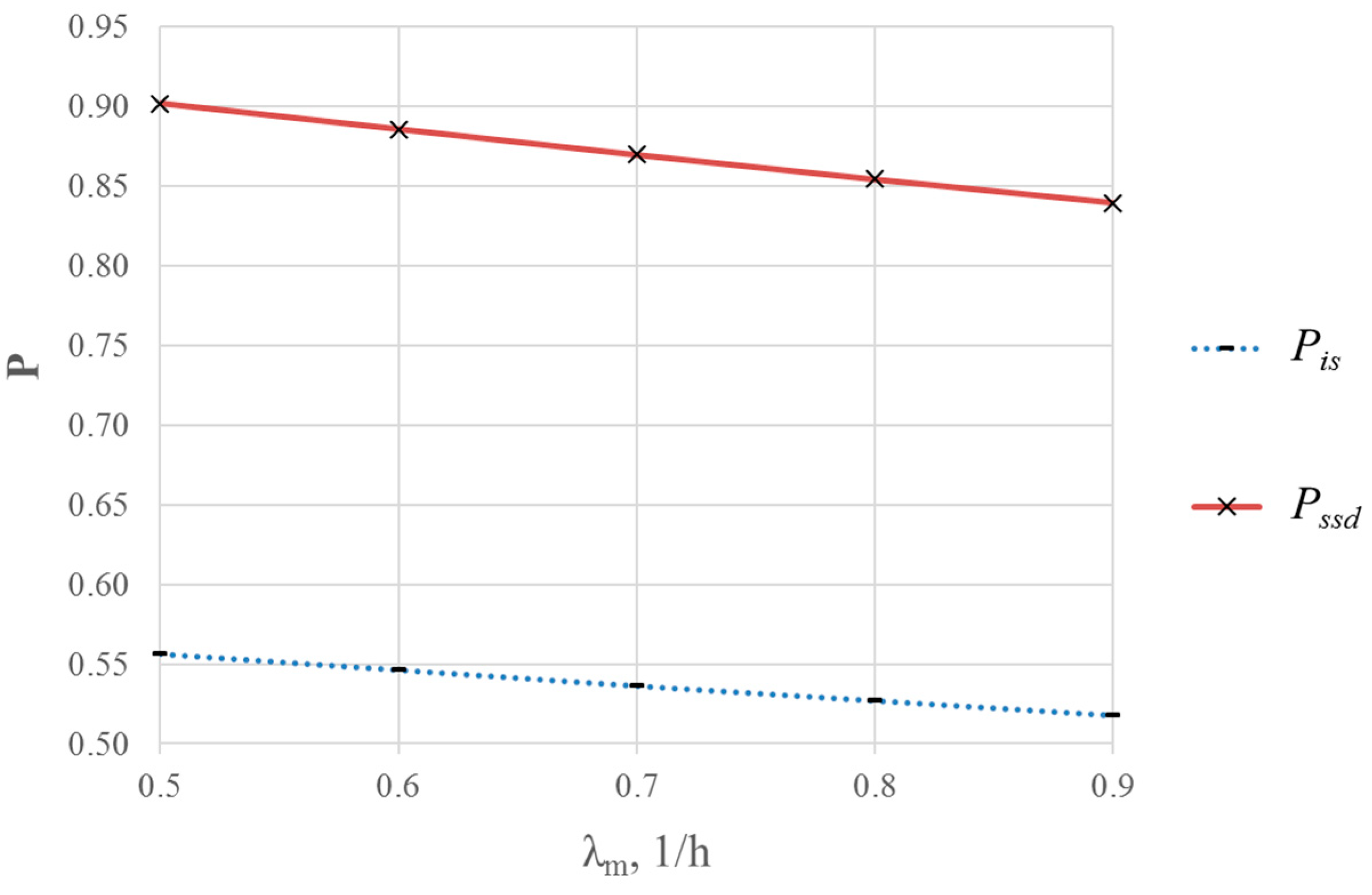
- The arrival rate (Figure 9 where , , , , );
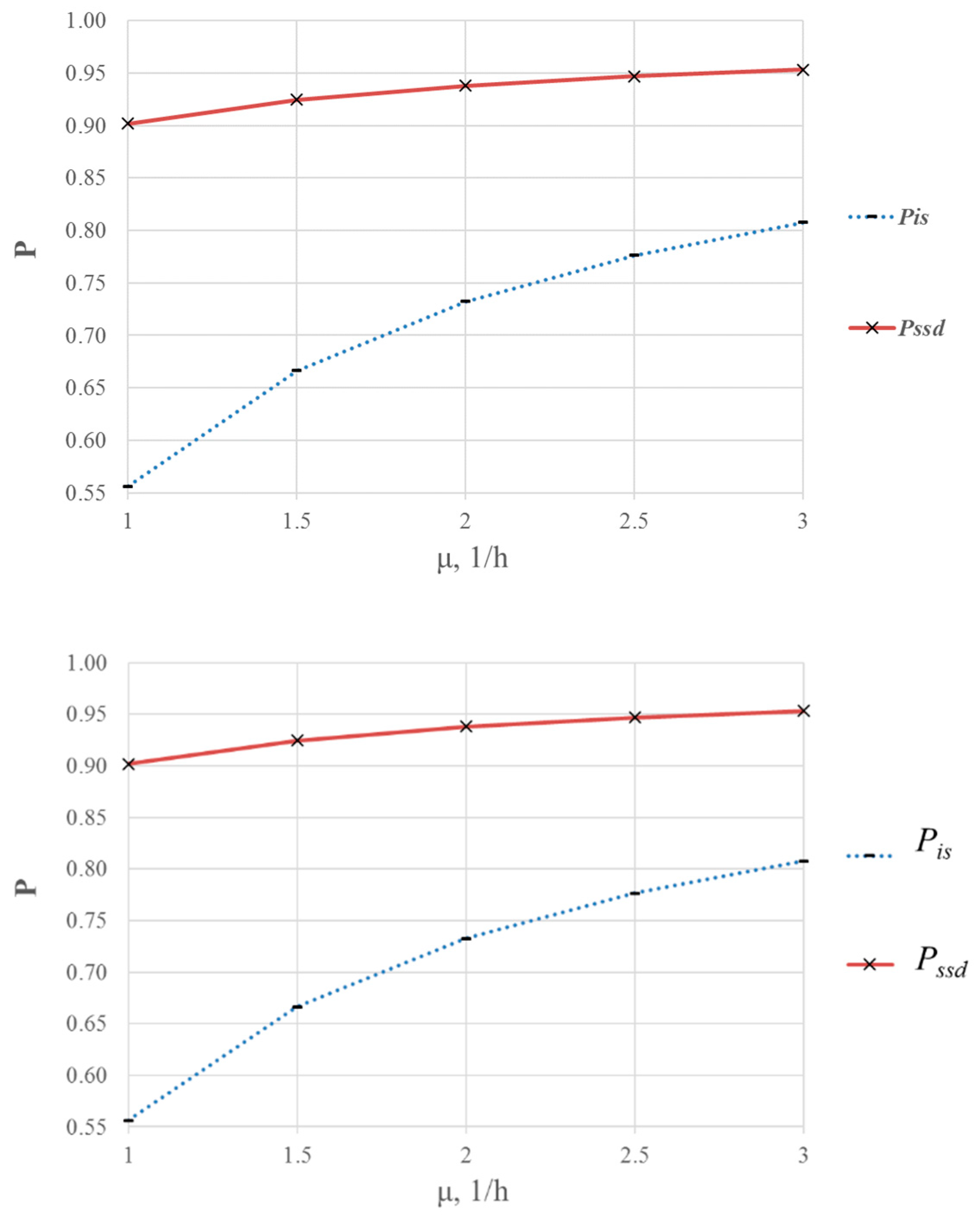
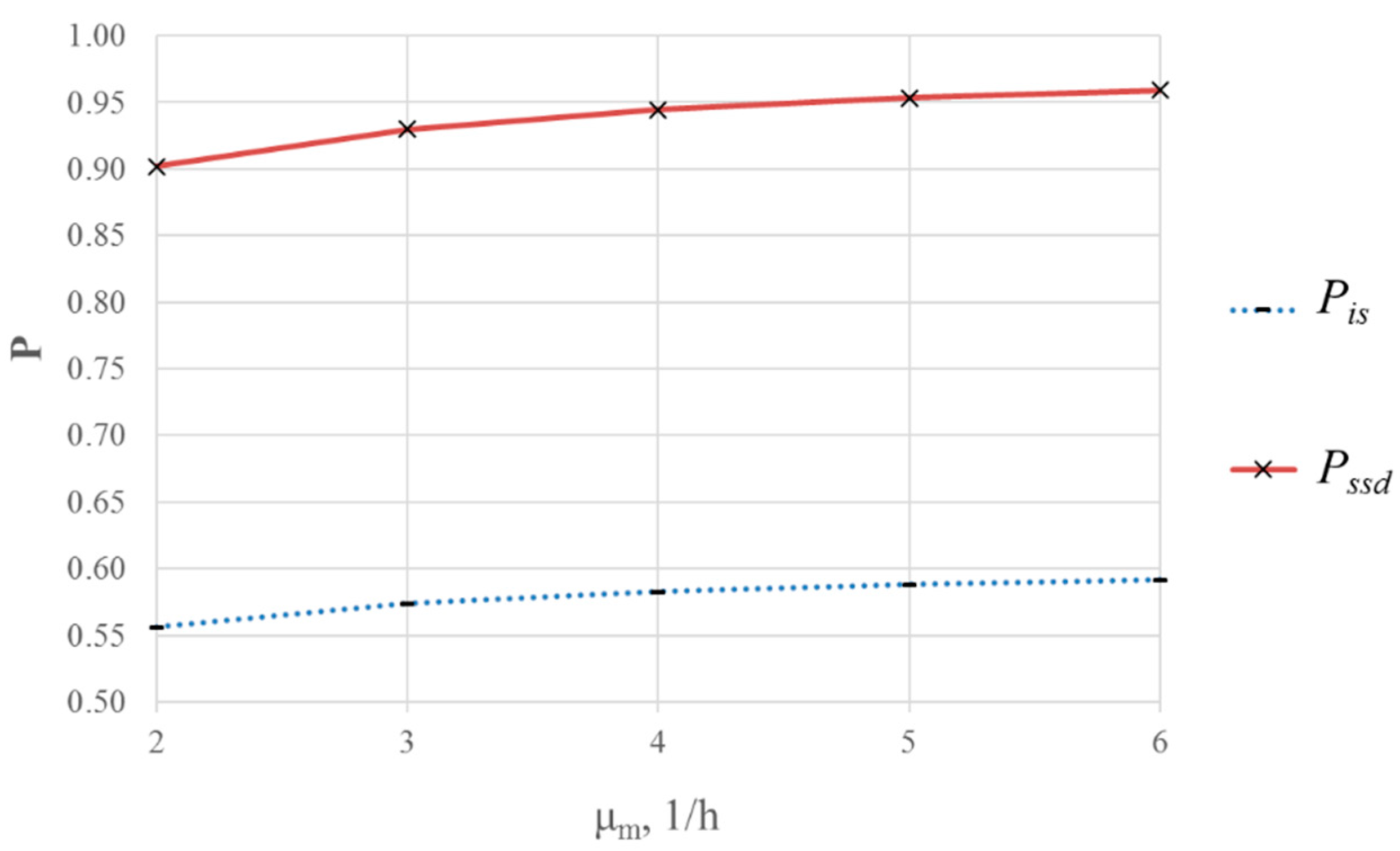
- The service rate (Figure 10 where , , , , );
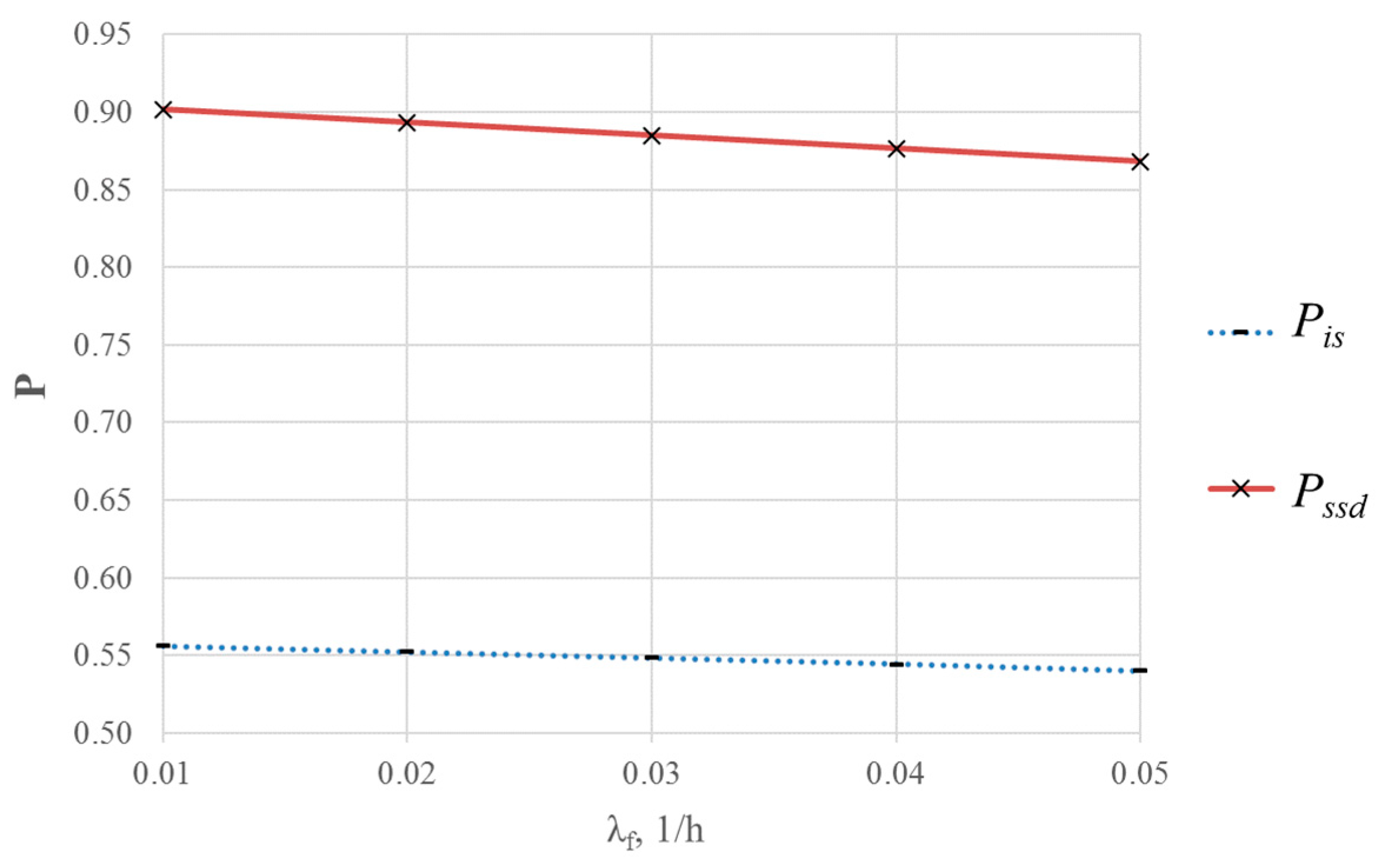
- The rate of UAV failures (Figure 11 where , , , , );
- The rate of UAV recovery (Figure 12 where , , , , );
- The rate of sending the UAVs for maintenance (Figure 13 where , , , , );
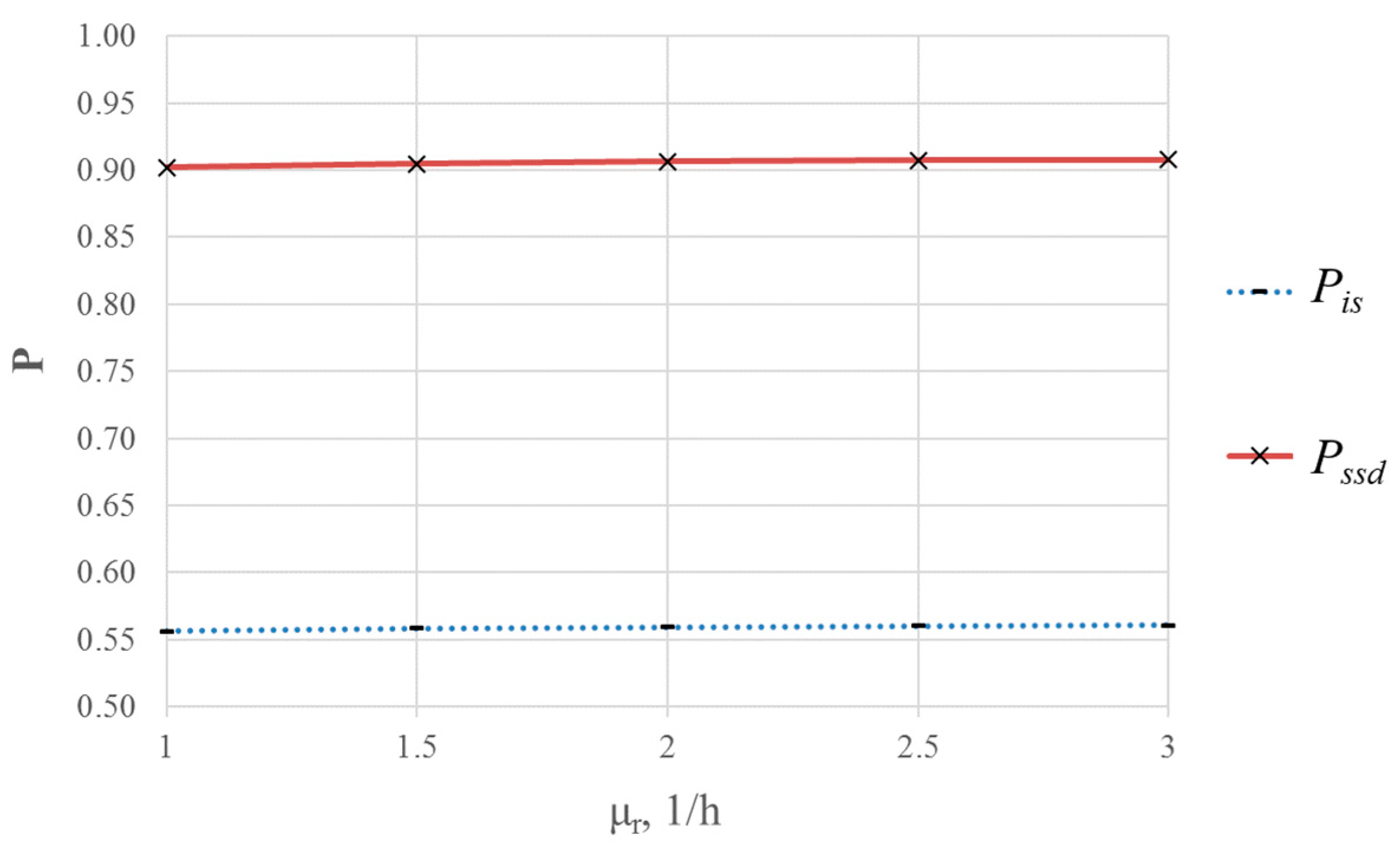
- The rate of UAV maintenance (Figure 14 where , , , , ).
- To increase Pssd, it is necessary to increase the service rate, rate of UAV recovery, and maintenance rate, the increase of which also leads to the increase of Pis;
- To ensure Pssd > 0.9, it is necessary to fulfil the condition that the value of the service rate exceeds the arrival rate by at least two times;
- An increase in UAVs’ maintenance rate may require significant costs, but it leads to an insignificant increase in Pssd.
4. Case Study of UAVFaaDS Application
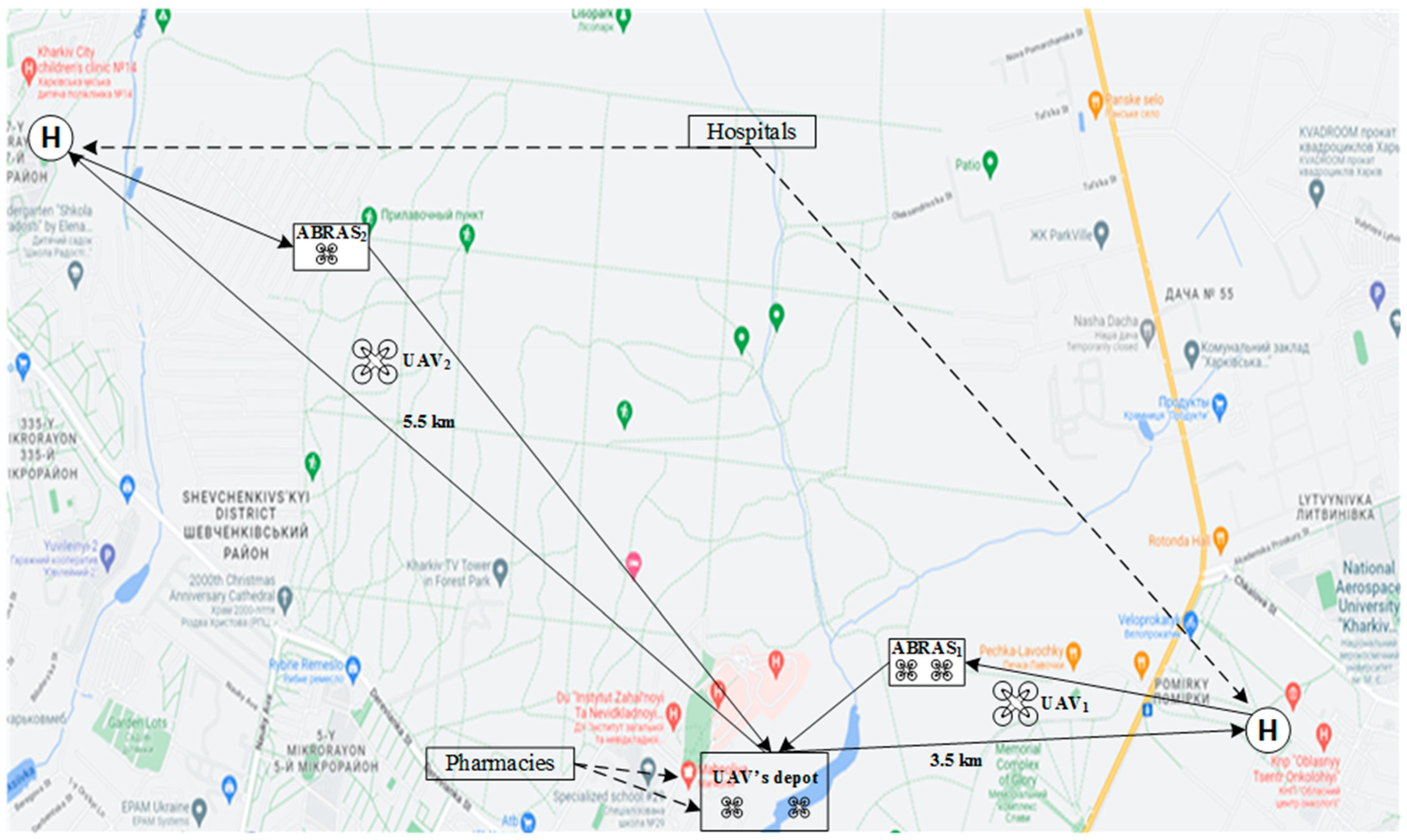
4.1. UAVFaaDS Application for Delivery of Medicines in the Normal Mode
4.2. UAVFaaDS Application for Delivery of Medicines in the Emergency Mode
5. Recommendations for Using the Developed Models
- Selection of models that describe UAVFaaDS in the form of queueing;
- Determination of UAVFaaDS indicators according to the specified model;
- Providing recommendations on improving UAVFaaDS indicators.
- A detailed description of the synthesis (selection) task of UAVFaaDS;
- Selection of UAVFaaDS parameters through analysis and application of UAVFaaDS models in the form of queueing.
- (a)
- operating modes, which may determine the general description of the service and the requirements for its implementation for different modes;
- (b)
- spatial factors, namely the size of the site areas where UAVFaaDS will be deployed;
- (c)
- maintenance policies determine the sequence of UAV recovery, testing, recharging, and so on during order processing.
6. Discussion
- The concept and principles of structuring the UAV fleet as a dependable multi-service system for smart cities. The concept of “UAV fleet as a dependable service” is based on the aggregation of multi-functional UAVs to provide various services. Productivity and dependability of services are ensured by systems of maintenance, operational backup, and recovery in case of failures and cyberattacks. This result is presented by the theoretical-set model considering sets of services, UAVs, and redundancy options. To assure the required dependability, it is needed to specify the taxonomy of failures of the UAV fleet, its information, and technical infrastructure including equipment and software of UAVs and ABMSs;
- The dependability and performance models of UAVFaaDS and their classification. These models are grounded on queueing theory and Markov chains considering different request streams and failures. They form a modeling base for the analysis and synthesis (composition) of the UAV fleet to cover a set of services and meet requirements for their quality. The modeling base can be extended by considering the parameters of the physical and information environment. So-called critical services should be selected into a special subset and developed in such a way as to assure a high level of dependability and safety.
- The cases of models’ application and calculating parameters and indicators of UAV fleets for delivery of medicines for normal and emergency modes. In these cases, the parameters, capacity and space locations of components of UAVFaaDS, and the practical experience of operational staff have been taken into consideration.
- To ensure a high probability of successful service delivery of UAVF, it is necessary to provide multiple excesses of the service rate over the arrival rate, which is achieved by increasing the number of UAVs and servers or by increasing their performance characteristics;
- A large value of the probability of the system idle state indicates inefficient use of the service. To reduce service downtime and provide a high probability of successful service delivery, it is necessary to reduce the number of servers/UAVs while simultaneously improving their characteristics, which will provide the necessary service rate values;
- UAV reliability indicators do not significantly affect the value of the probability of successful service delivery for customers who need a short order processing time. With large service time values, it is necessary to consider the possibility of reducing the Pssd value due to the UAV failures and to use the recovery and redundancy of UAVF components;
- Exceeding the service time over the value of the time of autonomous functioning of UAVs used as servers requires the deployment of the ABMS system, which ensures the restoration of on-board power sources of UAVs. In the case of using a service system, the service rate decreases, which requires taking measures to ensure the high probability of successful service delivery by using more productive UAVs or increasing their number.
- Determination of the need to use reserve UAVs and their number to ensure the quality of service requirements (Pssd indicator), if the intensity of applications and their maintenance is known with a fixed intensity of failures and repair of UAVs;
- Search for the error-free characteristics of UAVs that ensure the requirements for the quality of service against known intensities of applications and their maintenance and a fixed number of UAVs;
- Determination of the number and characteristics of the ABMS reliability as a basic element of the service system, ensuring the requirements for the quality of service against known intensities of applications for the service of UAVs and their number;
- Determination of the economic feasibility of the expansion of the service (increase (expansion) of the range of UAVs and ABMSs) with an increase in the flow of orders for service. This requires the application of additional criteria considering the cost of individual UAVs and ABMSs and optimization of the value of the probability of downtime.
- (a)
- more simple ones (these services are covered by the suggested models):
- (separate) UAV as a service;
- UAV swarm as a (dependable) service;
- UAV flock as a (dependable) service.
- (b)
- more complex/general ones:
- UAVF as a dependable and resilient service. In this case, a few aspects (changing of requirements to UAVFaaS, parameters of the physical and cyber environment, unspecified failures, and so on [44]) should be considered. For that, combined Markov and semi-Markov models and their modifications such as multi-fragmental and multi-phase models can be applied [48];
- Autonomous transport vehicles (ATV) as a (dependable) service. Some described principles and models can be adopted and applied for other types of vehicles (driverless cars, shuttles, sea robots, and so on);
- Mixed mobile means including ATV, UAV, and others as a (dependable and resilient) service. This case covers two previous ones.
7. Conclusions
- Development of the IT infrastructure of UAVFaaDS architecture joining embedded on-board systems, Internet of Drones/UAVF, ISC, and ISM in accordance with Equation (1) to build a more detailed reliability block diagram or failure tree;
- Development and research of UAVFaaDS multi-fragmental and multi-phase models of availability considering detection and elimination of design faults and vulnerabilities of separate components and failures of ABMSs as well;
- Extending the queueing-theory-based set of models considering the different combinations of failures and policies of recovering drones, as well as ABMS hardware and software in case of failures;
- Specifying parameters of different SCS requests and optimization of number and types of drones, the structure of swarms and flocks for delivery of services in accordance with criteria “dependability-costs”.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J. Networking architectures and protocols for smart city systems. J. Internet Serv. Appl. 2018, 9, 26. [Google Scholar] [CrossRef]
- Bellini, P.; Nesi, P.; Pantaleo, G. IoT-Enabled Smart Cities: A Review of Concepts, Frameworks and Key Technologies. Appl. Sci. 2022, 12, 1607. [Google Scholar] [CrossRef]
- Kim, J.; Yang, B. A Smart City Service Business Model: Focusing on Transportation Services. Sustainability 2021, 13, 10832. [Google Scholar] [CrossRef]
- Kaluarachchi, Y. Implementing Data-Driven Smart City Applications for Future Cities. Smart Cities 2022, 5, 455–474. [Google Scholar] [CrossRef]
- Fourastier, Y.; Baron, C.; Thomas, C.; Esteban, P. Assurance levels for decision making in autonomous intelligent systems and their safety. In Proceedings of the 2020 11th International Conference on Dependable Systems, Services and Technologies (DESSERT), Kyiv, Ukraine, 14–18 May 2020; pp. 475–483. [Google Scholar] [CrossRef]
- Kim, H.; Mokdad, L.; Ben-Othman, J. Designing UAV Surveillance Frameworks for Smart City and Extensive Ocean with Differential Perspectives. IEEE Commun. Mag. 2018, 56, 98–104. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on collaborative smart drones and internet of things for improving smartness of smart cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Yapp, J.; Seker, R.; Babiceanu, R. UAV as a service: A network simulation environment. In Modelling and Simulation for Autonomous Systems. MESAS 2016. Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics; Hodicky, J., Ed.; Springer International Publishing: Cham, Switzerland, 2016; Volume 9991, pp. 347–355. [Google Scholar] [CrossRef]
- Sun, Y.; Tan, Q.; Yan, C.; Chang, Y.; Xiang, X.; Zhou, H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones 2022, 6, 153. [Google Scholar] [CrossRef]
- Kliushnikov, I.M.; Fesenko, H.V.; Kharchenko, V.S. Scheduling UAV fleets for the persistent operation of UAV-enabled wireless networks during NPP monitoring. Radioelectron. Comput. Syst. 2020, 1, 29–36. [Google Scholar] [CrossRef]
- Fesenko, H.; Kharchenko, V.; Bardis, N.; Kor, A.L.; Brezhniev, Y. Drone fleet survivability evaluation based on Lanchester’s modified deterministic model. Int. J. Circuits Syst. Signal Process. 2020, 14, 775–781. [Google Scholar] [CrossRef]
- Teng, H.; Dong, M.; Liu, Y.; Tian, W.; Liu, X. A low-cost physical location discovery scheme for large-scale Internet of Things in smart city through joint use of vehicles and UAVs. Future Gener. Comput. Syst. 2021, 118, 310–326. [Google Scholar] [CrossRef]
- Yilmaz, B.Y.; Denizer, S.N. Multi UAV Based Traffic Control in Smart Cities. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Hoque, M.A.; Hossain, M.; Noor, S.; Islam, S.M.R.; Hasan, R. IoTaaS: Drone Based Intrenet of Things as a Service Framework For Smart Cities. IEEE IoT J. 2021, 9, 12425–12439. [Google Scholar] [CrossRef]
- Beg, A.; Qureshi, A.R.; Sheltami, T.; Yasar, A. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city. Pers. Ubiquit. Comput. 2021, 25, 33–50. [Google Scholar] [CrossRef]
- Qi, F.; Zhu, X.; Mang, G.; Kadoch, M.; Li, W. UAV Network and IoT in the Sky for Future Smart Cities. IEEE Netw. 2019, 33, 96–101. [Google Scholar] [CrossRef]
- Raza, A.; Bukhari, S.H.R.; Aadil, F.; Iqbal, Z. An UAV-assisted VANET architecture for intelligent transportation system in smart cities. Int. J. Distrib. Sens. Netw. 2021, 17. [Google Scholar] [CrossRef]
- Fellner, R.; Zawistowski, M.; Sadowski, P. Reliability of UAVs in Fire Services Operations. Tests and Measurements of Selected Parameters. In Advances in Air Traffic Engineering. ATE 2020. Lecture Notes in Intelligent Transportation and Infrastructure; Kwasiborska, A., Skorupski, J., Yatskiv, I., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 34–45. [Google Scholar] [CrossRef]
- Nguyen, H.P.D.; Nguyen, D.D. Drone Application in Smart Cities: The General Overview of Security Vulnerabilities and Countermeasures for Data Communication. In Development and Future of Internet of Drones (IoD): Insights, Trends and Road Ahead. Studies in Systems, Decision and Control; Krishnamurthi, R., Nayyar, A., Hassanien, A., Eds.; Springer International Publishing: Cham, Switzerland, 2021; Volume 332, pp. 185–210. [Google Scholar] [CrossRef]
- Wakode, M.S. Role of AI and Big Data Analytics in UAV-Enabled IoT Applications for Smart Cities. In Unmanned Aerial Vehicles for Internet of Things (IoT). In Unmanned Aerial Vehicles for Internet of Things (IoT); Mohindru, V., Singh, Y., Bhatt, R., Gupta, A.K., Eds.; Scrivener Publishing LLC: Beverly, MA, USA, 2021; pp. 193–205. [Google Scholar] [CrossRef]
- Gohari, A.; Ahmad, A.B.; Rahim, R.B.A.; Supa’at, A.S.M.; Abd Razak, S.; Gismalla, M.S.M. Involvement of Surveillance Drones in Smart Cities: A Systematic Review. IEEE Access 2022, 10, 56611–56628. [Google Scholar] [CrossRef]
- Sharma, R.; Arya, R. UAV based long range environment monitoring system with Industry 5.0 perspectives for smart city infrastructure. Comput. Ind. Eng. 2022, 168, 108066. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0. Drones 2022, 6, 177. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability assessment of UAV systems. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 266–270. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability and Maintenance Analysis of Unmanned Aerial Vehicles. Sensors 2018, 18, 3171. [Google Scholar] [CrossRef]
- Franco, M.L.; Braga, R.T.V.; Branco, K.R.J.L.; De Oliveira, A.L.; Dezan, C.; Diguet, J.P. Model-Based Dependability Analysis of Unmanned Aerial Vehicles—A Case Study. In Proceedings of the 2018 48th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W), Luxembourg City, Luxembourg, 25–28 June 2018; pp. 263–270. [Google Scholar] [CrossRef]
- Fesenko, H.; Kharchenko, V. Reliability Models for a Multi-fleet of Drones with Two-level Hot Standby Redundancy Considering a Control System Structure. In Proceedings of the 2019 10th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019; Volume 2, pp. 1030–1035. [Google Scholar] [CrossRef]
- Rusnak, P.; Kvassay, M.; Zaitseva, E.; Kharchenko, V.; Fesenko, H. Reliability Assessment of Heterogeneous Drone Fleet with Sliding Redundancy. In Proceedings of the 2019 10th International Conference on Dependable Systems, Services and Technologies (DESSERT), Leeds, UK, 5–7 June 2019; pp. 19–24. [Google Scholar] [CrossRef]
- Tipantuña, C.; Hesselbach, X.; Sánchez-Aguero, V.; Valera, F.; Vidal, I.; Nogales, B. An NFV-Based Energy Scheduling Algorithm for a 5G Enabled Fleet of Programmable Unmanned Aerial Vehicles. Wirel. Commun. Mob. Comput. 2019, 2019, 4734821. [Google Scholar] [CrossRef]
- Brito, C.; Silva, L.; Callou, G.; Nguyen, T.A.; Min, D.; Lee, J.-W.; Silva, F.A. Offloading Data through Unmanned Aerial Vehicles: A Dependability Evaluation. Electronics 2021, 10, 1916. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, M.; Dui, H.; Ren, Y.; Sun, B.; Yang, D.; Wang, Z. Importance measure-based phased mission reliability and UAV number optimization for swarm. Rel. Eng. Syst. Saf. 2022, 223, 108478. [Google Scholar] [CrossRef]
- Aslansefat, K.; Nikolaou, P.; Walker, M.; Akram, M.N.; Sorokos, I.; Reich, J.; Kolios, P.; Michael, M.K.; Theocharides, T.; Ellinas, G.; et al. SafeDrones: Real-Time Reliability Evaluation of UAVs using Executable Digital Dependable Identities. arXiv 2022, arXiv:2207.05643. [Google Scholar] [CrossRef]
- Zheng, B.; Li, Y.; Cheng, W.; Wu, H.; Liu, W. A multi-channel load awareness-based MAC protocol for flying ad hoc networks. J. Wirel. Com. Netw. 2020, 181. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Q.; Feng, Z. Timeliness analysis of service-driven collaborative mobile edge computing in UAV swarm. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Kreimer, J. Performance Evaluation of Multiple Unmanned Aerial Vehicles Operating in General Regime with Shortage of Maintenance Facilities. J. Comput. Commun. 2016, 4, 70–78. [Google Scholar] [CrossRef][Green Version]
- Cokyasar, T.; Dong, W.; Jin, M. Network optimization for hybrid last-mile delivery with trucks and drones. In Proceedings of the 2019 IISE Annual Conference, Orlando, FL, USA, 18–21 May 2019; pp. 19–24. [Google Scholar]
- Qin, Y.; Kishk, M.A.; Alouini, M.S. On the influence of charging stations spatial distribution on aerial wireless networks. IEEE Trans. Green Commun. Netw. 2021, 5, 1395–1409. [Google Scholar] [CrossRef]
- Boggio-Dandry, A.; Soyata, T. Perpetual Flight for UAV Drone Swarms Using Continuous Energy Replenishment. In Proceedings of the 2018 9th Annual Ubiquitous Computing, Electronics and Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 478–484. [Google Scholar] [CrossRef]
- Kirichek, R.; Paramonov, A.; Koucheryavy, A. Swarm of Public Unmanned Aerial Vehicles as a Queuing Network. In Distributed Computer and Communication Networks. DCCN 2015. Communications in Computer and Information Science; Vishnevsky, V., Kozyrev, D., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 601, pp. 111–120. [Google Scholar] [CrossRef]
- Bilen, T.; Canberk, B. Content Delivery From the Sky: Drone-Aided Load Balancing for Mobile-CDN. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2022, 9, e2. [Google Scholar] [CrossRef]
- Kliushnikov, I.; Kharchenko, V.; Fesenko, H.; Leontiiev, K.; Illiashenko, O. UAV Fleet with Battery Recharging for NPP Monitoring: Queuing System and Routing Based Reliability Models. In New Advances in Dependability of Networks and Systems. DepCoS-RELCOMEX 2022. Lecture Notes in Networks and Systems; Zamojski, W., Mazurkiewicz, J., Sugier, J., Walkowiak, T., Kacprzyk, J., Eds.; Springer International Publishing: Cham, Switzerland, 2022; Volume 484, pp. 109–119. [Google Scholar] [CrossRef]
- Avižienis, A.; Laprie, J.C.; Randell, B.; Landwehr, C. Basic concepts and taxonomy of dependable and secure computing. IEEE Trans. Depend. Secure Comput. 2004, 1, 11–33. [Google Scholar] [CrossRef]
- Ponochovnyi, Y.; Kharchenko, V. Dependability Assurance Methodology of Information and Control Systems Using Multipurpose Service Strategies. Radioelectron. Comput. Syst. 2020, 3, 43–58. [Google Scholar] [CrossRef]
- Kharchenko, V.; Andrashov, A.; Sklyar, V.; Kovalenko, A.; Siora, O. Gap-and-IMECA-Based Assessment of I&C Systems Cyber Security. In Complex Systems and Dependability. Advances in Intelligent and Soft Computing; Zamojski, W., Mazurkiewicz, J., Sugier, J., Walkowiak, T., Kacprzyk, J., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2013; Volume 170, pp. 149–164. [Google Scholar] [CrossRef]
- Fesenko, H.; Kharchenko, V.; Sachenko, A.; Hiromoto, R.; Kochan, V. An Internet of Drone-based multi-version post-severe accident monitoring system: Structures and reliability. In Dependable IoT for Human and Industry: Modeling, Architecting, Implementation; Kharchenko, V., Kor, A.L., Rucinski, A., Eds.; River Publishers: Gistrup, Denmark, 2018; pp. 197–218. [Google Scholar]
- Bliss, D.; Garbos, R.; Kane, P.; Kharchenko, V.; Kochanski, T.; Rucinski, A. Homo Digitus: Its Dependable and Resilient Smart Ecosystem. Smart Cities 2021, 4, 514–531. [Google Scholar] [CrossRef]
- Kharchenko, V.; Ponochovnyi, Y.; Ivanchenko, O.; Fesenko, H.; Illiashenko, O. Combining Markov and Semi-Markov Modelling for Assessing Availability and Cybersecurity of Cloud and IoT Systems. Cryptography 2022, 6, 44. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Description of the State |
|---|---|
| S0 | No customers are in the system |
| S1 | The system services one customer |
| Si | i customers are in the system, one customer is serviced, (i −1) customers are in the queue |
| State | Description of the State |
|---|---|
| S0 | No customers are in the system |
| S1 | The system services one customer |
| Sn | The system services n customers |
| S(n+1) | (n + 1) customers are in the system, n customers are serviced, one customer is in the queue |
| State | Description of System Status |
|---|---|
| S00 | No customers are in the system, and all servers (UAVs) are in operable states |
| S10 | One customer is in the system, and all servers (UAVs) are in operable states |
| Sk0 | k customers are in the system, and all servers (UAVs) are in operable states |
| Sn0 | n customers are in the system, and all servers (UAVs) are in operable states |
| Si0 | customers are in the system, n customers are serviced, all servers (UAVs) are in operable states, and (i − n) customers are in the queue |
| S01 | No customers are in the system, and one server (UAVs) is in a non-operable state |
| S11 | One customer is in the system, and one server (UAVs) is in a non-operable state |
| Sk1 | k customers are in the system, and one server (UAVs) is in a non-operable state |
| S21 | Two customers are in the system, and one server (UAVs) is in a non-operable state |
| S0(n−1) | No customers are in the system, and (n − 1) servers (UAVs) are in non-operable states |
| S1(n−1) | One customer is in the system, and (n − 1) servers (UAVs) are in non-operable states |
| S0n | No customers are in the system, and all servers (n UAVs) are in non-operable states |
| State | Description of the State |
|---|---|
| S00[0] | No customers are in the system, and all servers (all UAVs in the swarms) are in operable states |
| S10[0] | One customer is in the system, and all servers (all UAVs in the swarms) are in operable states |
| S10[1] | One customer is in the system, and one UAV in one swarm is in a non-operable state |
| S10[u−1] | One customer is in the system, and [u − 1] UAVs in one swarm are in non-operable states |
| Sk0[0] | k customers are in the system, and all servers (all UAVs in the swarms) are in operable states |
| Sk0[1] | k customers are in the system, and one UAV in one swarm is in a non-operable state |
| Sk0[u−1] | k customers are in the system, and [u − 1] UAVs in one swarm are in non-operable states |
| Sn0[0] | n customers are in the system, and all servers (all UAVs in the swarms) are in operable states |
| Sn0[1] | n customers are in the system, and one UAV in one swarm is in a non-operable state |
| Sn0[u−1] | n customers are in the system, and [u − 1] UAVs in one swarm are in non-operable states |
| Si0[0] | i customers are in the system, (i − n) customers are in the queue, and all servers (all UAVs in the swarms) are in operable states |
| Si0[1] | i customers are in the system, (i − n) customers are in the queue, and one UAV in one swarm is in a non-operable state |
| Si0[u−1] | i customers are in the system, (i − n) customers are in the queue, and [u − 1] UAVs in one swarm are in a non-operable state |
| S01[u] | No customers are in the system, and one server is in a non-operable state (u UAVs in one swarm are in non-operable states) |
| S11[u] | One customer is in the system, and one server is in a non-operable state (u UAVs in one swarm are in non-operable states) |
| Sk1[u] | k customers are in the system, and one server is in a non-operable state (u UAVs in one swarm are in non-operable states) |
| S0(n−1)[u] | No customers are in the system, and (n − 1) servers are in non-operable states (u UAVs in (n − 1) swarms are in non-operable states) |
| S1(n−1)[u] | One customer is in the system, and (n − 1) servers are in non-operable states (u UAVs in (n − 1) swarms are in non-operable states) |
| S0n[u] | No customers are in the system, and all n servers are in non-operable states (u UAVs in each swarm are in non-operable states) |
| State | Description of the State |
|---|---|
| S00_0 | No customers are in the system, all servers (UAVs) are in operable states, and no servers (UAVs) require maintenance |
| S10_0 | One customer is in the system, all servers (UAVs) are in operable states, and no servers (UAVs) require maintenance |
| Sk0_0 | k customers are in the system, all servers (UAVs) are in operable states, and no servers (UAVs) require maintenance |
| Sn0_0 | n customers are in the system, all servers (UAVs) are in operable states, and no servers (UAVs) require maintenance |
| Si0_0 | i customers are in the system, n customers are serviced, all servers (UAVs) are in operable states, no servers (UAVs) require maintenance, and (i − n) customers are in the queue. |
| S01_0 | No customer is in the system, one server (UAV) is in a non-operable state, and no servers (UAVs) require maintenance |
| S11_0 | One customer is in the system, one server (UAV) is in a non-operable state, and no servers (UAVs) require maintenance |
| Sk1_0 | k customers are in the system, one server (UAV) is in a non-operable state, and no servers (UAVs) require maintenance |
| S0(n−1)_0 | No customer is in the system, (n − 1) servers (UAVs) are in non-operable states, and no servers (UAVs) require maintenance |
| S1(n−1)_0 | One customer is in the system, (n − 1) servers (UAVs) are in non-operable states, no servers (UAVs) require maintenance |
| S0n_0 | No customer is in the system, n servers (UAVs) are in non-operable states, no servers (UAVs) require maintenance |
| S10_1 | One customer is in the system, all servers (UAVs) are in operable states, one server (UAV) is under maintenance |
| S11_1 | One customer is in the system, one server (UAVs) is in a non-operable state, and one server (UAV) is under maintenance |
| Sk0_1 | k customers are in the system, all servers (UAVs) are in operable states, and one server (UAV) is under maintenance |
| Sk1_1 | k customers are in the system, one server (UAV) is in a non-operable state, and one server (UAV) is under maintenance |
| Sk1_k | k customers are in the system, one server (UAV) is in a non-operable state, and k servers (UAVs) are under maintenance |
| Sk0_k | k customers are in the system, all servers (UAVs) are in operable states, and k servers (UAVs) are under maintenance |
| Sn0_1 | n customers are in the system, all servers (UAVs) are in operable states, and one server (UAVs) is under maintenance |
| Sn0_k | n customers are in the system, one server (UAV) is in a non-operable state, and k servers (UAVs) are under maintenance |
| Sn0_n | n customers are in the system, one servers (UAV) is in a non-operable state, and n servers (UAVs) are under maintenance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kharchenko, V.; Kliushnikov, I.; Rucinski, A.; Fesenko, H.; Illiashenko, O. UAV Fleet as a Dependable Service for Smart Cities: Model-Based Assessment and Application. Smart Cities 2022, 5, 1151-1178. https://doi.org/10.3390/smartcities5030058
Kharchenko V, Kliushnikov I, Rucinski A, Fesenko H, Illiashenko O. UAV Fleet as a Dependable Service for Smart Cities: Model-Based Assessment and Application. Smart Cities. 2022; 5(3):1151-1178. https://doi.org/10.3390/smartcities5030058
Chicago/Turabian StyleKharchenko, Vyacheslav, Ihor Kliushnikov, Andrzej Rucinski, Herman Fesenko, and Oleg Illiashenko. 2022. "UAV Fleet as a Dependable Service for Smart Cities: Model-Based Assessment and Application" Smart Cities 5, no. 3: 1151-1178. https://doi.org/10.3390/smartcities5030058
APA StyleKharchenko, V., Kliushnikov, I., Rucinski, A., Fesenko, H., & Illiashenko, O. (2022). UAV Fleet as a Dependable Service for Smart Cities: Model-Based Assessment and Application. Smart Cities, 5(3), 1151-1178. https://doi.org/10.3390/smartcities5030058