
A Data-Driven Situational Awareness System for Enhanced Air Cargo Operations Emergency Control

 ,
,
Abstract
:1. Introduction
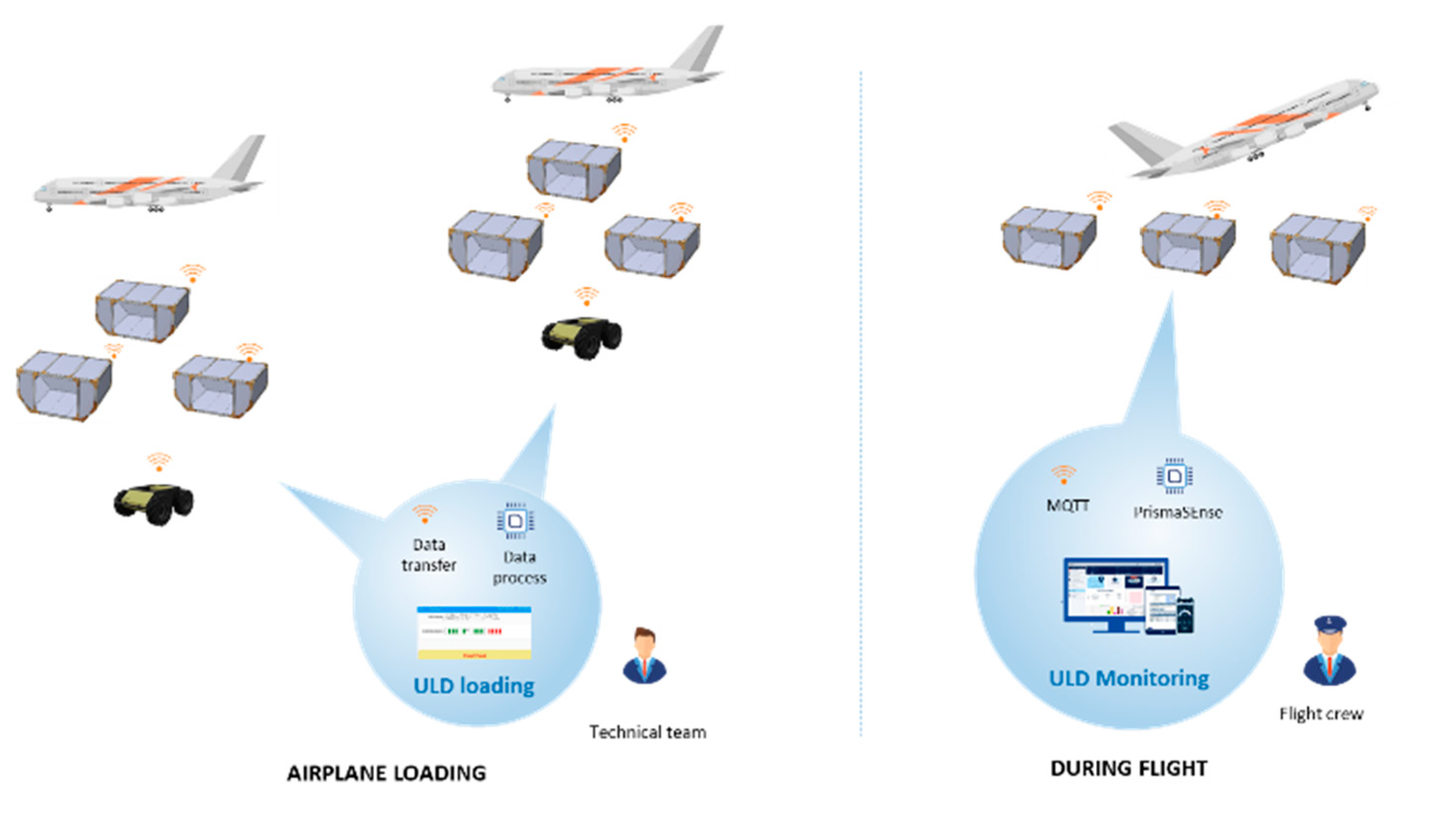
2. General Architecture
- Smart Collectors set up a secure wireless network inside the ULD to transmit the processed data to the HMI with a user-defined sampling rate and the ability to maintain and customize them remotely. The wireless protocol will be based on IEEE 802.15.4, with additional layers and data format to cover the requirements of the airport environment and increase the network quality of service, while secure transfer protocols ensure scalability of the solution;
- Data from collectors will further be transferred to the in-field HMI. All data are stored in data lakes for an extended period (up to one year, depending on the number of sensors and sampling rate). Being the upper layer of the onboard architecture at this level, two tasks will be performed: (a) the execution of ML and AI algorithms for early warning reasoning, (b) Real-Time Visualization via Augmented Reality alerting of all outcomes;
- Through HMI, data from the collector network on each of the ULDs are delivered to the robotic platforms. HMIs secure (a) the uninterrupted connectivity with dedicated collector networks, and (b) the collection of data that needs to be processed in real-time. HMIs on each air cargo loading/unloading operation establish a separate wireless network for data exchange between them;
- HMI periodically produces binary files and compresses them to reduce the size of the data to be sent via normal satellite broadband to the data center (Cloud Computing). The cloud could collect the processed data from a wide range of airplanes/ULDs (fleet wise) and handle them accordingly for the following fleet-level data analytics, data storage (Cloud level), and tracking/monitoring of incidents. Besides, third party data (e.g., weather, societal, satellite imaging disease dispersion), as well as data from in-field FR teams (drones, on-sea FR, nearby vessels), will be entered in the main database in the same format.
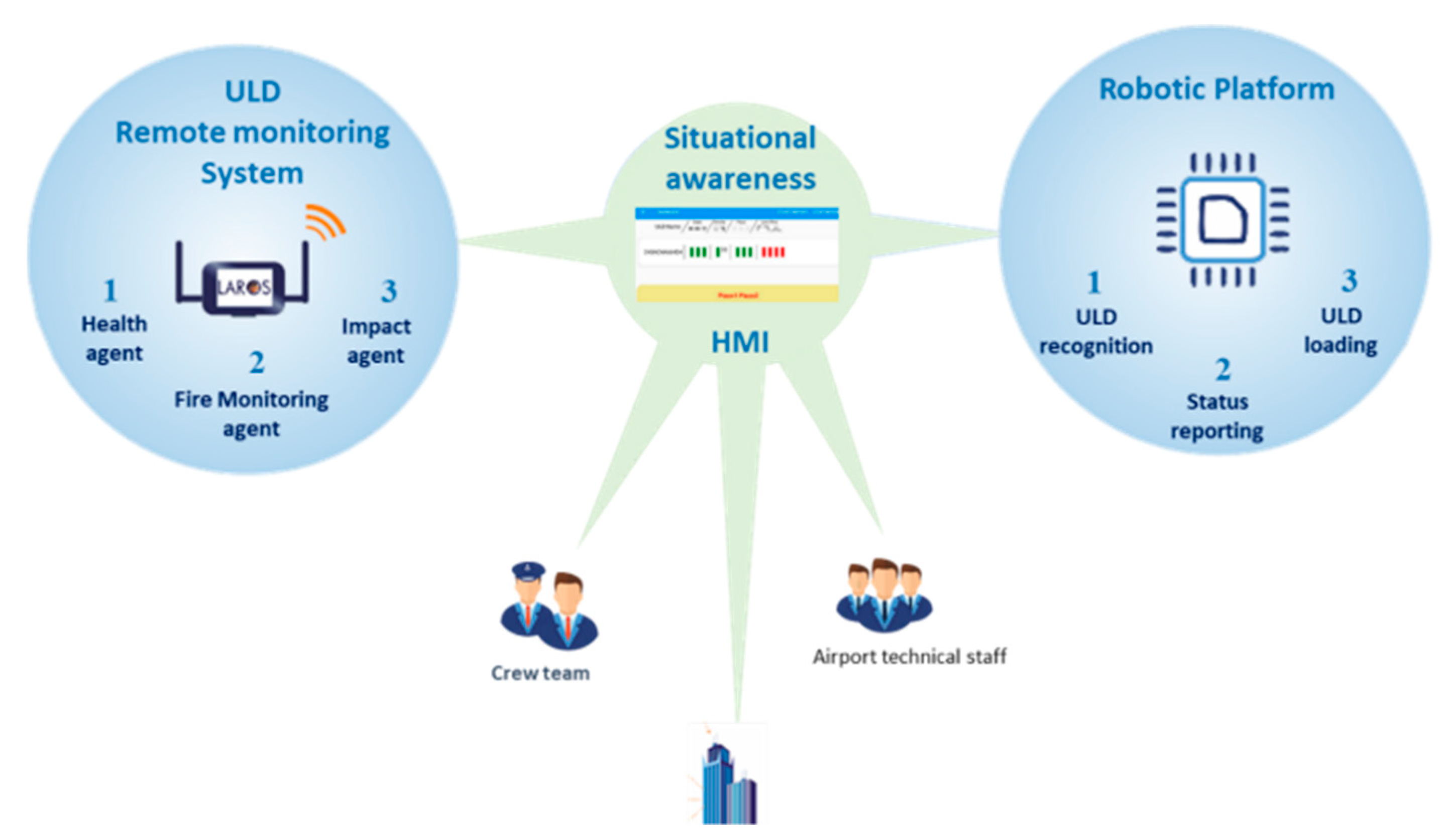
3. ULD Remote Monitoring System
- Idle: data from sensors are collected, although nothing is reported. If a smoke alarm happens, it will be reported to HMI. The system can still receive commands.
- Normal: ULD will periodically report its measurements to the HMI, depending on its “report period” setting. It will also spontaneously send alarms to the HMI.
- Lock: designed for the loading–unloading phase. ULD sends every 100 ms lock feedback to the robotic platform through HMI.
3.1. Smoke/Fire Detection
- Degraded mode: if any of the secondary parameters fail, the smoke detector enters degraded mode and relies on primary parameters only;
- Warning: internal monitoring of the smoke detector triggered on a minor fault criterion, recording the occurrence;
- Prefault: once the contamination of the detector reaches a fixed threshold, the smoke detector provides, through this flag, the necessity for maintenance;
- Standby: the smoke detector is operational, but not in operation;
- Alarm: the smoke detector has detected smoke signals or heat elevation signals that its algorithm identifies as a potential fire event and triggers the alarm;
- Fault: internal monitoring of the smoke detector triggered in major fault criteria, recording the occurrence.
3.2. Monitoring the Structural Health of the ULD
3.3. Supervision of the Locking Status of the ULD
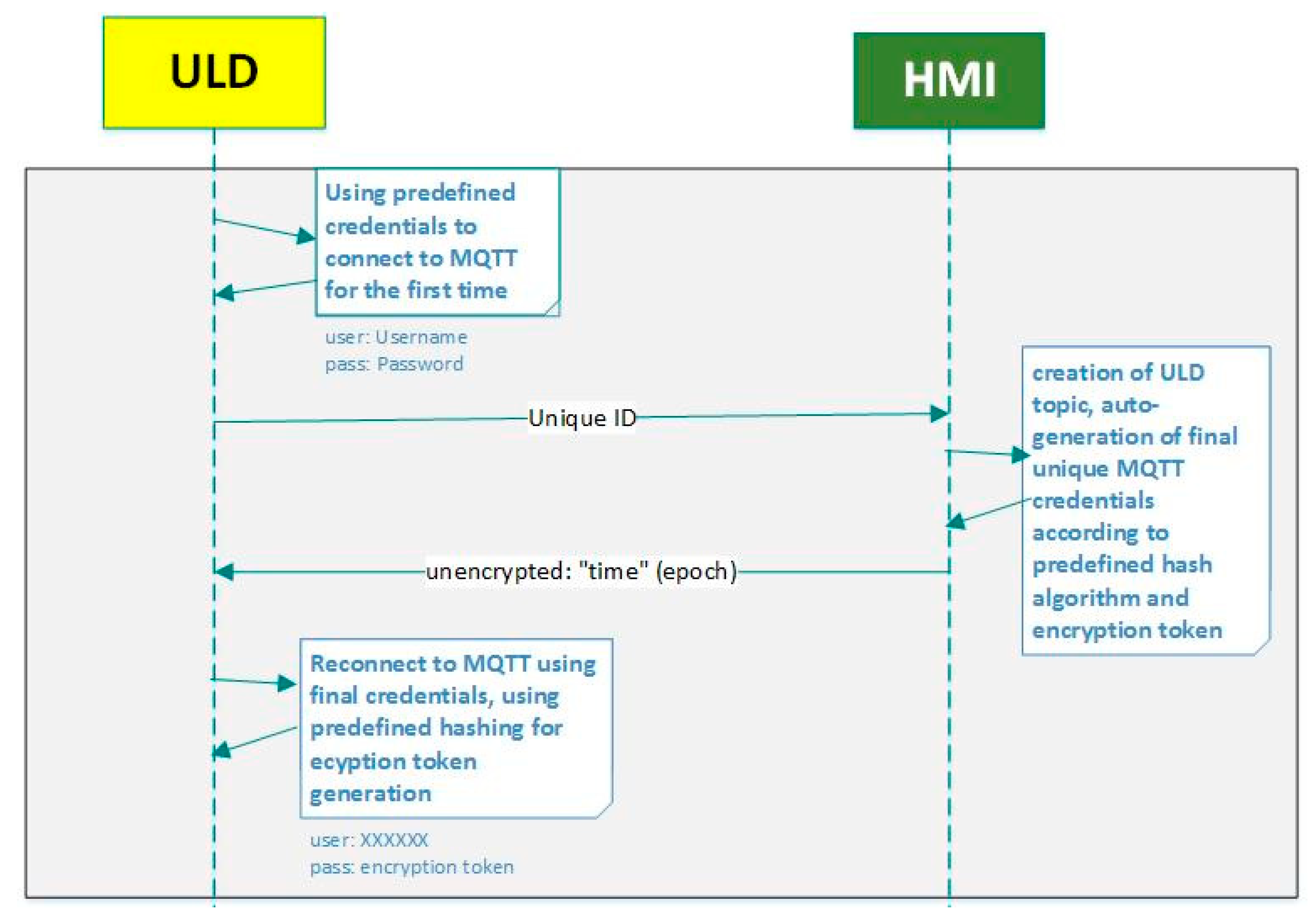
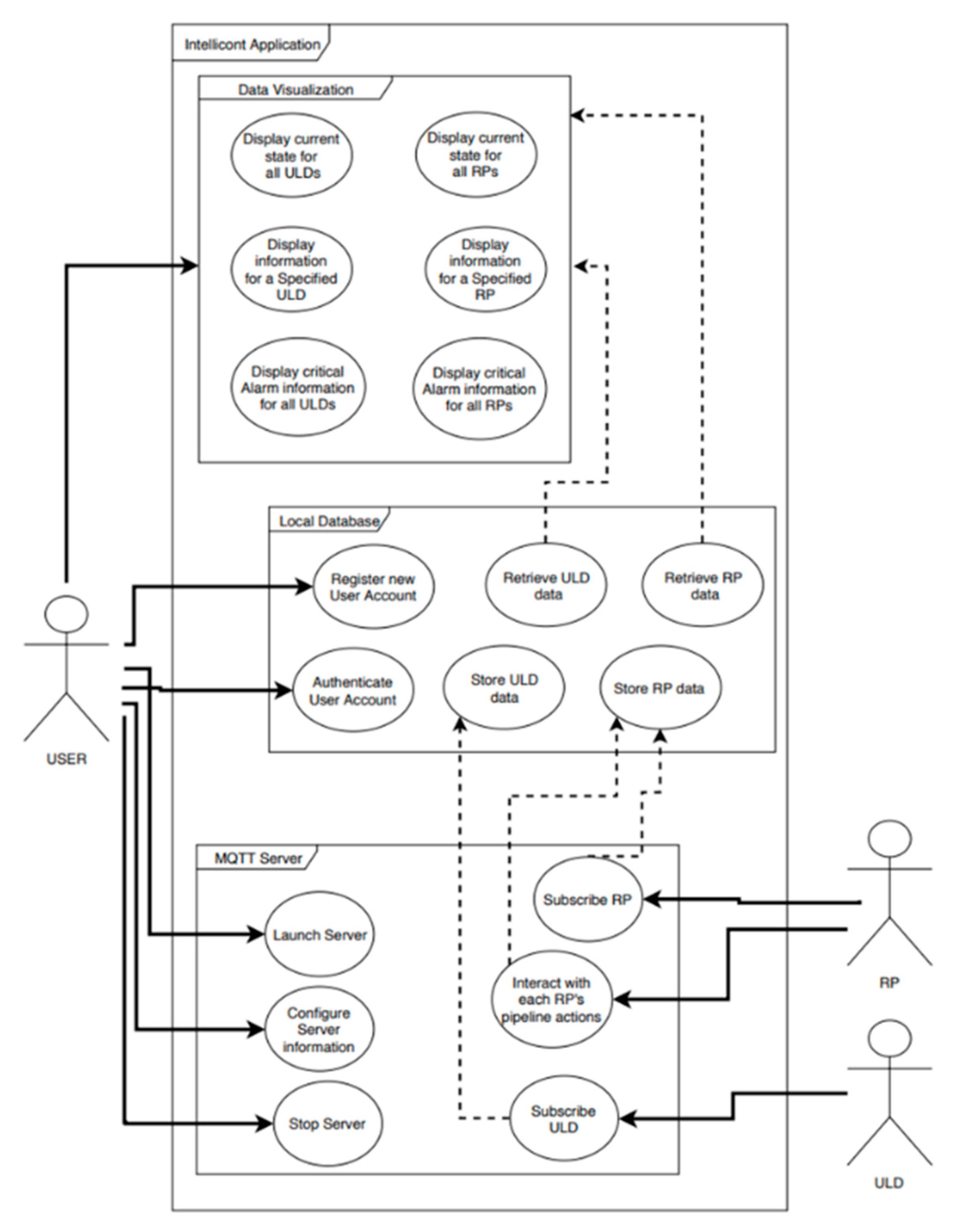
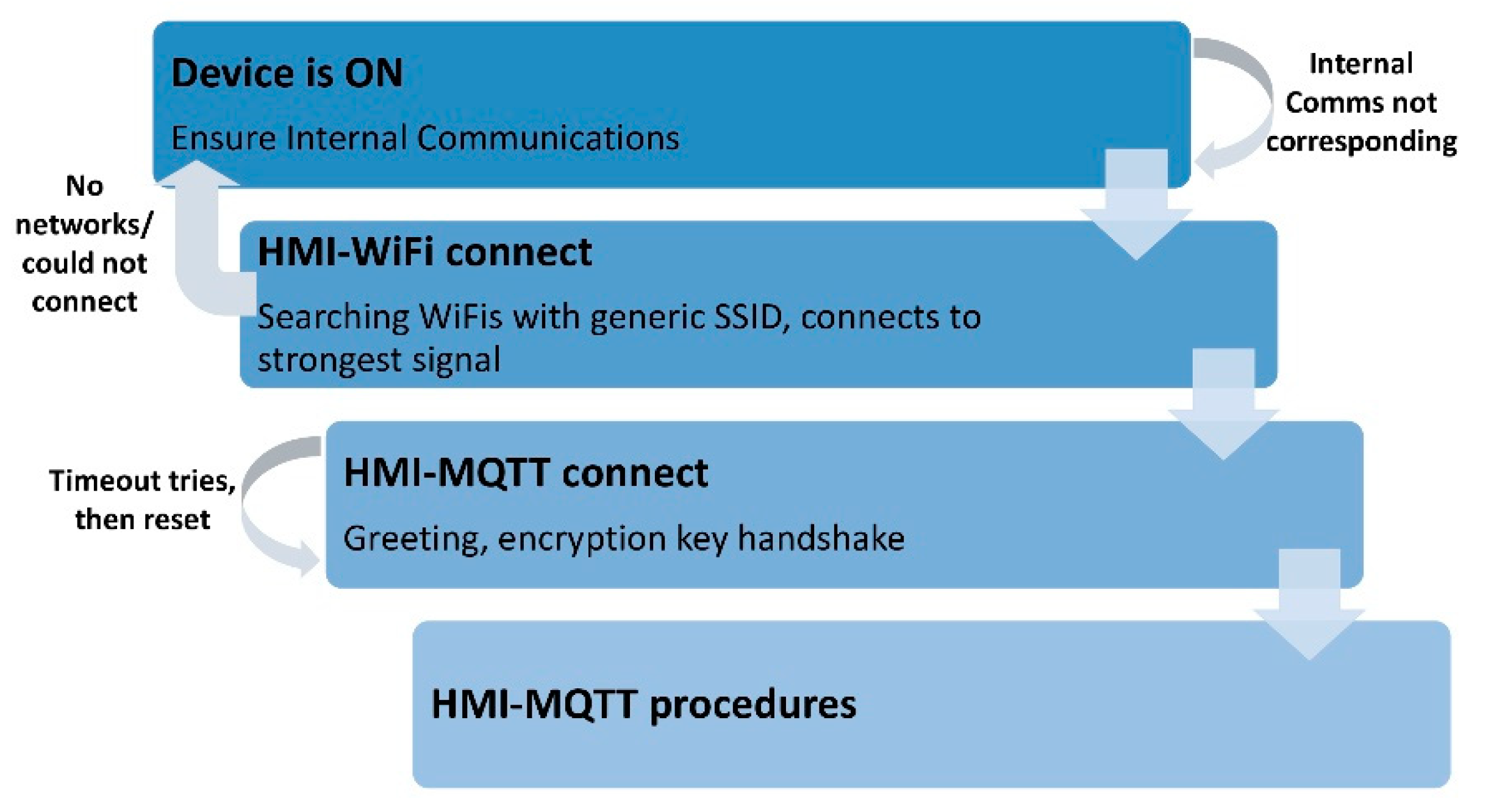
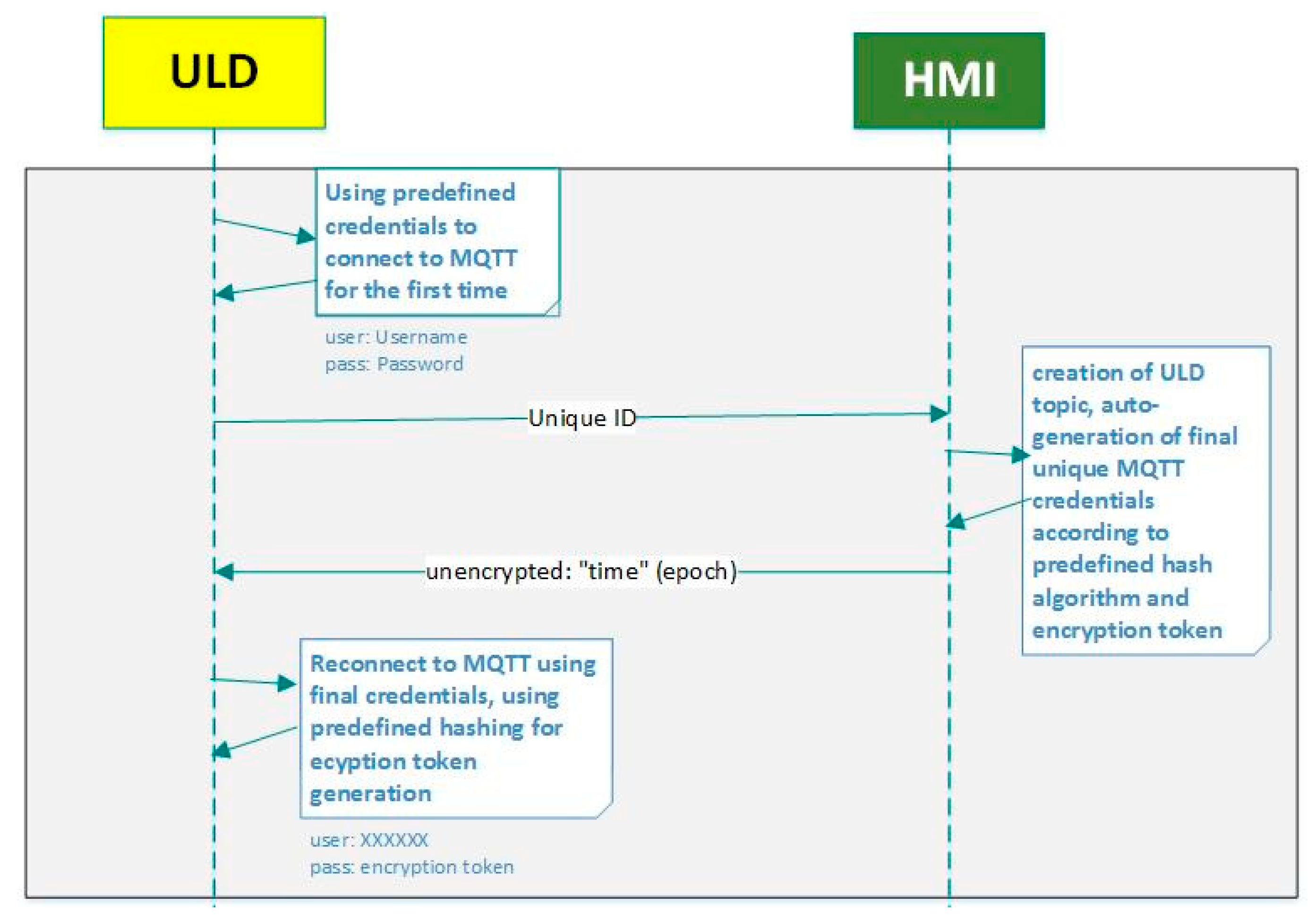
4. Communication Link
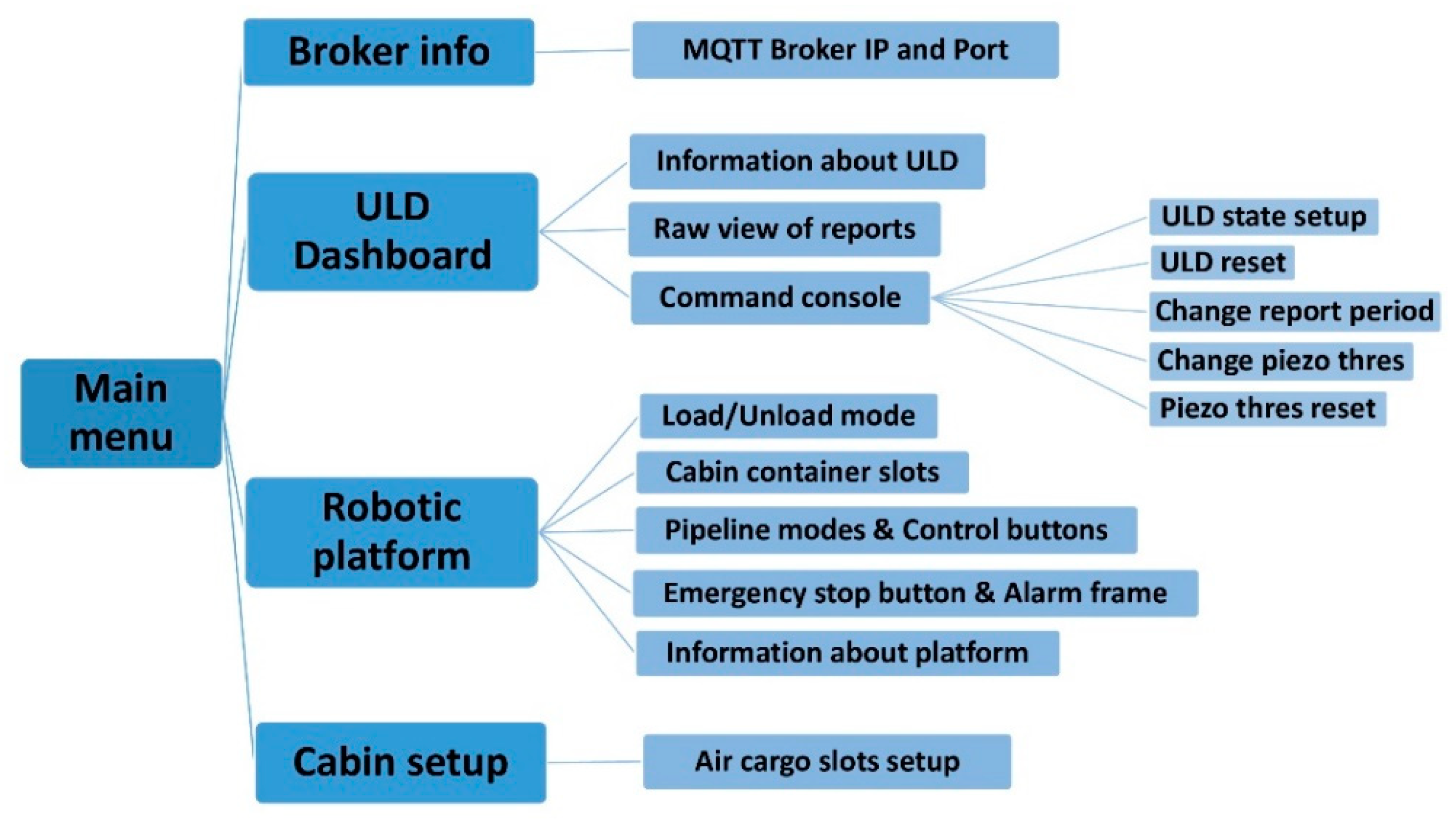
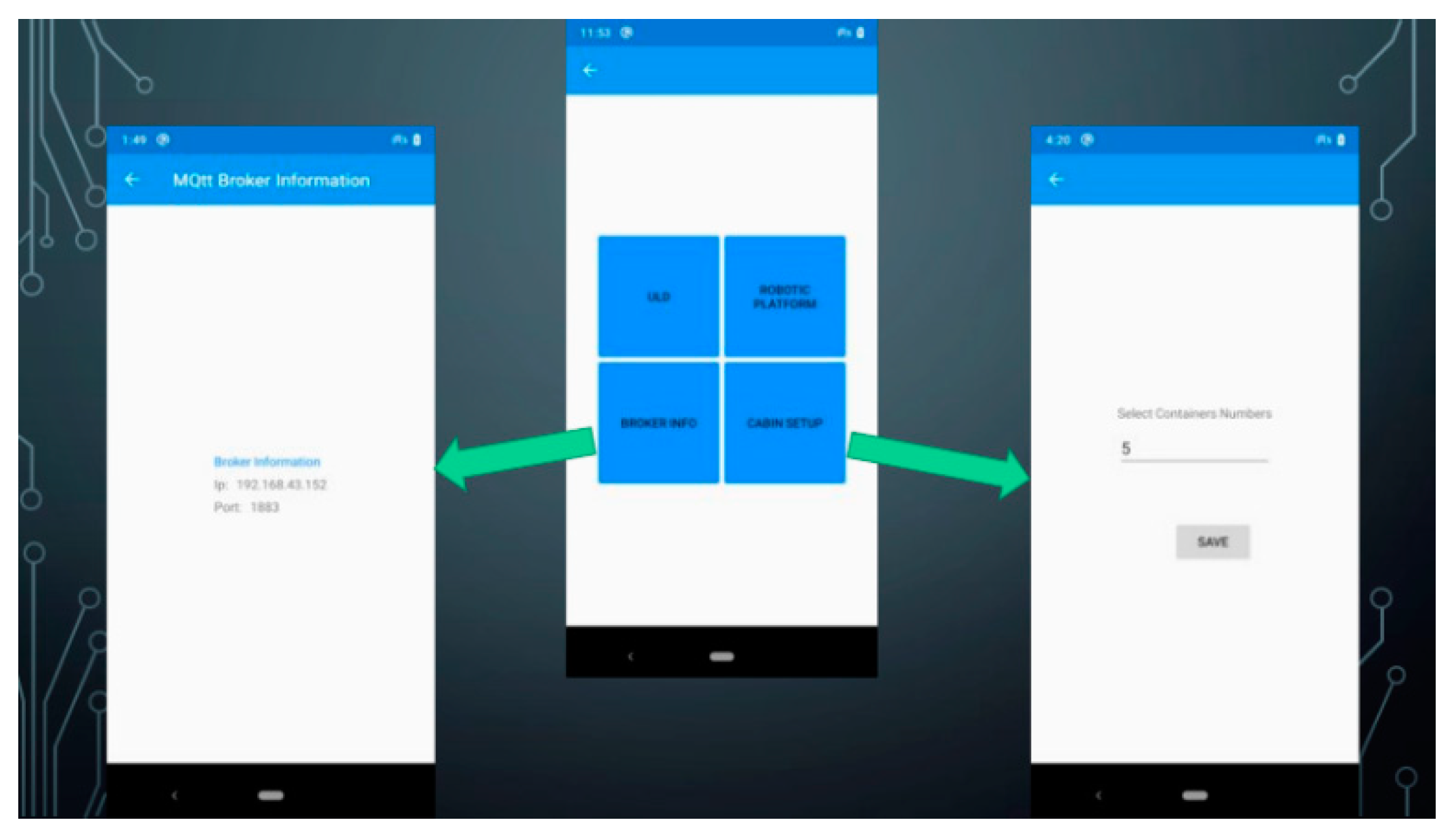
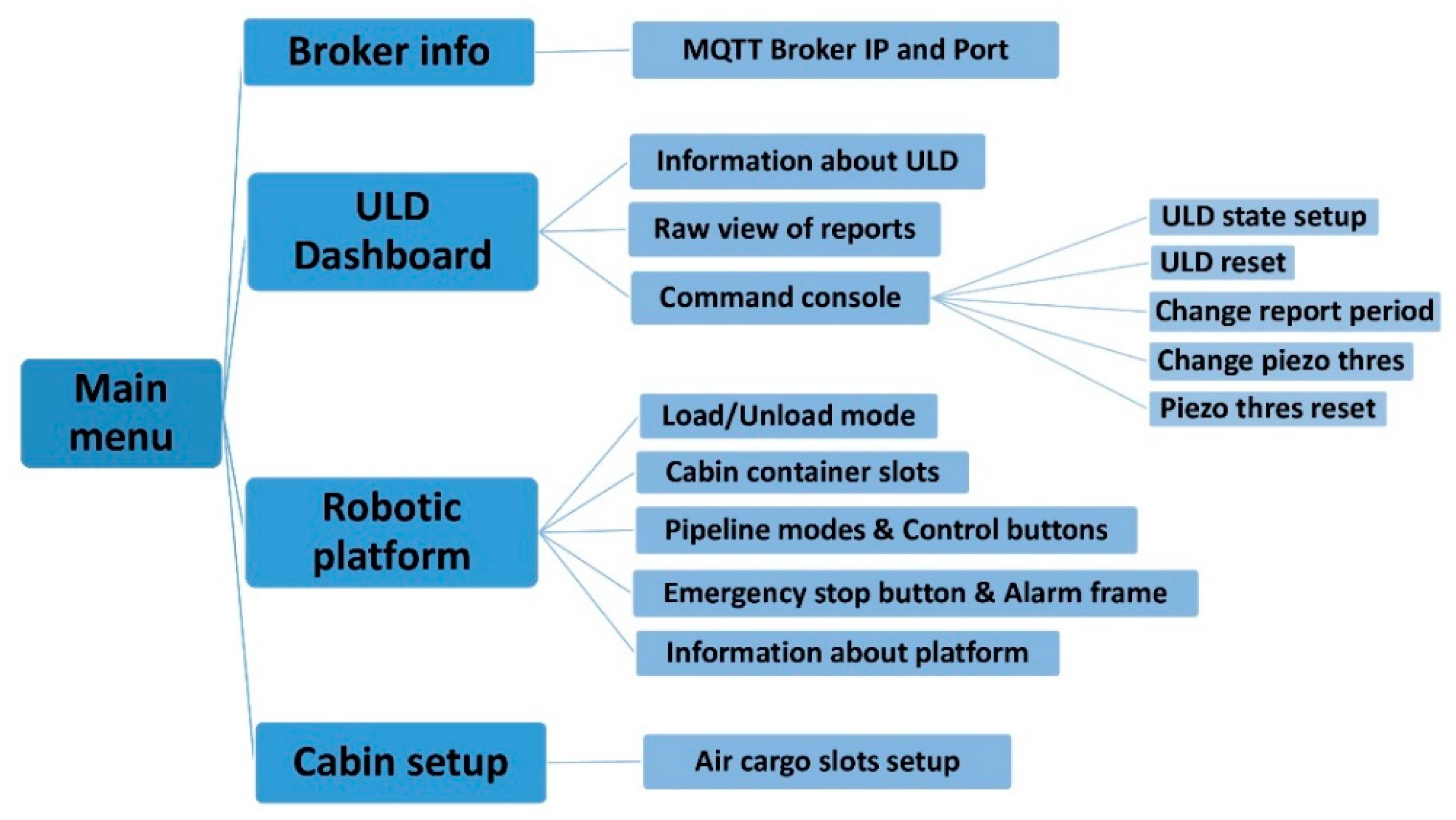
5. Human Machine Interface
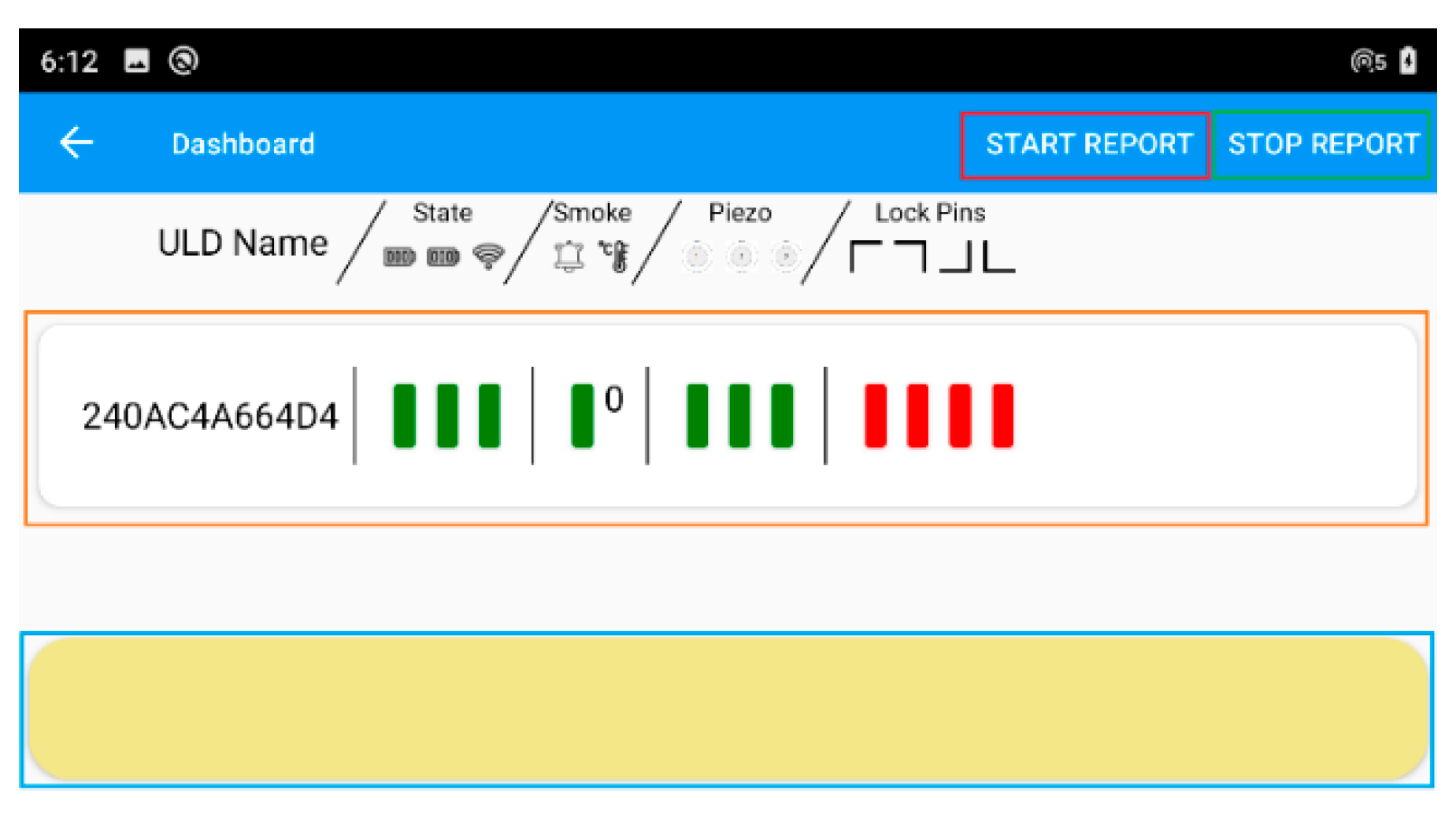
5.1. ULD Dashboard Page
- ULD Device Frame with ULD name, Batteries Status color indicators, Smoke Sensor Status and Temperature, Piezo Sensor threshold status color indicators, and Magnetic Sensors corner combination color indicators. When it is pressed, it navigates to the ULD Information Page for more analytic ULD measurements;
- Alarm Frame used to present real-time alarms from ULD devices;
- Start Report Button that changes all ULD states to Normal for obtaining measurement reports;
- Stop Report Button that changes all ULD states to Idle for stopping the obtention of measurement reports.
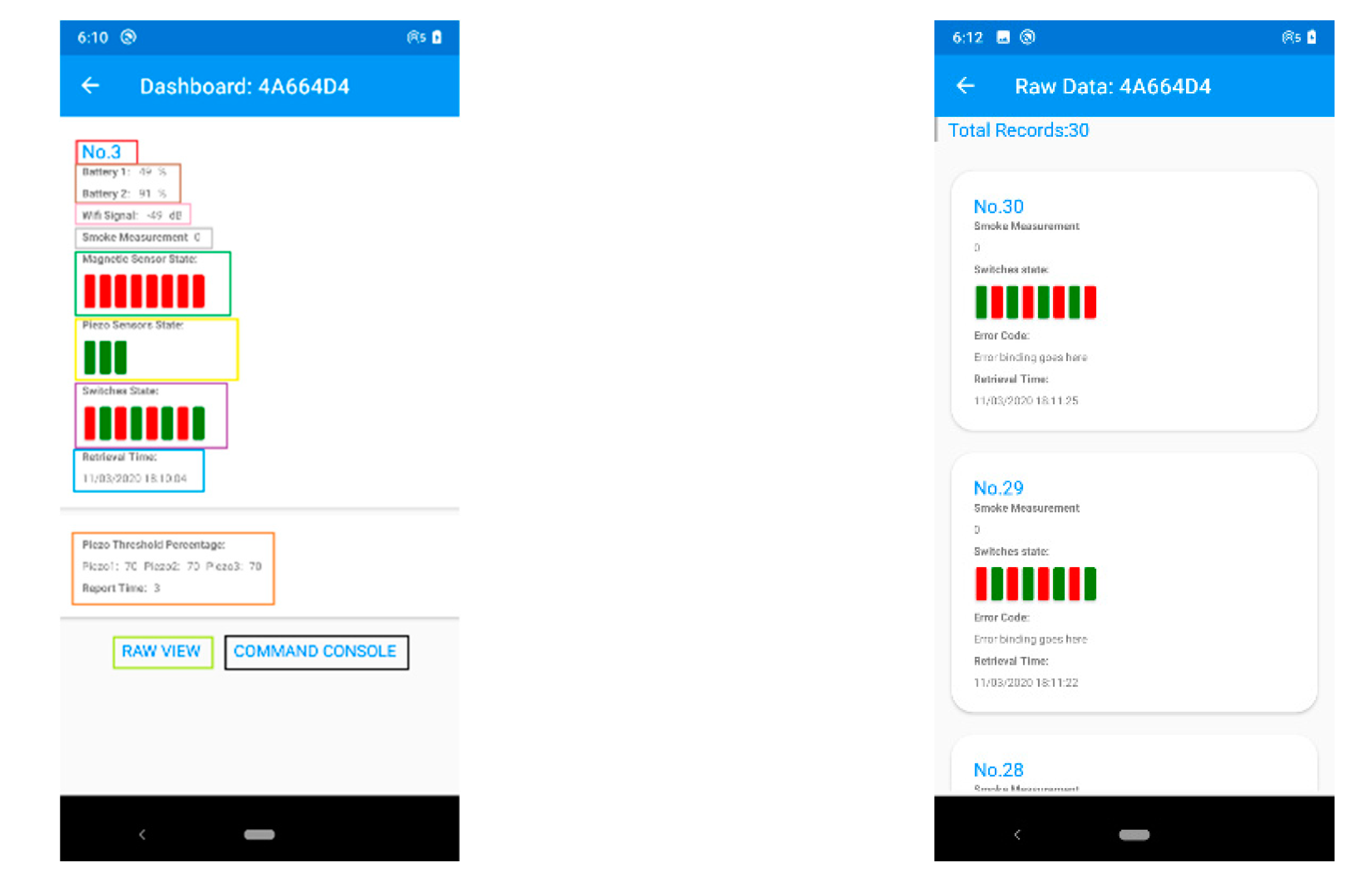
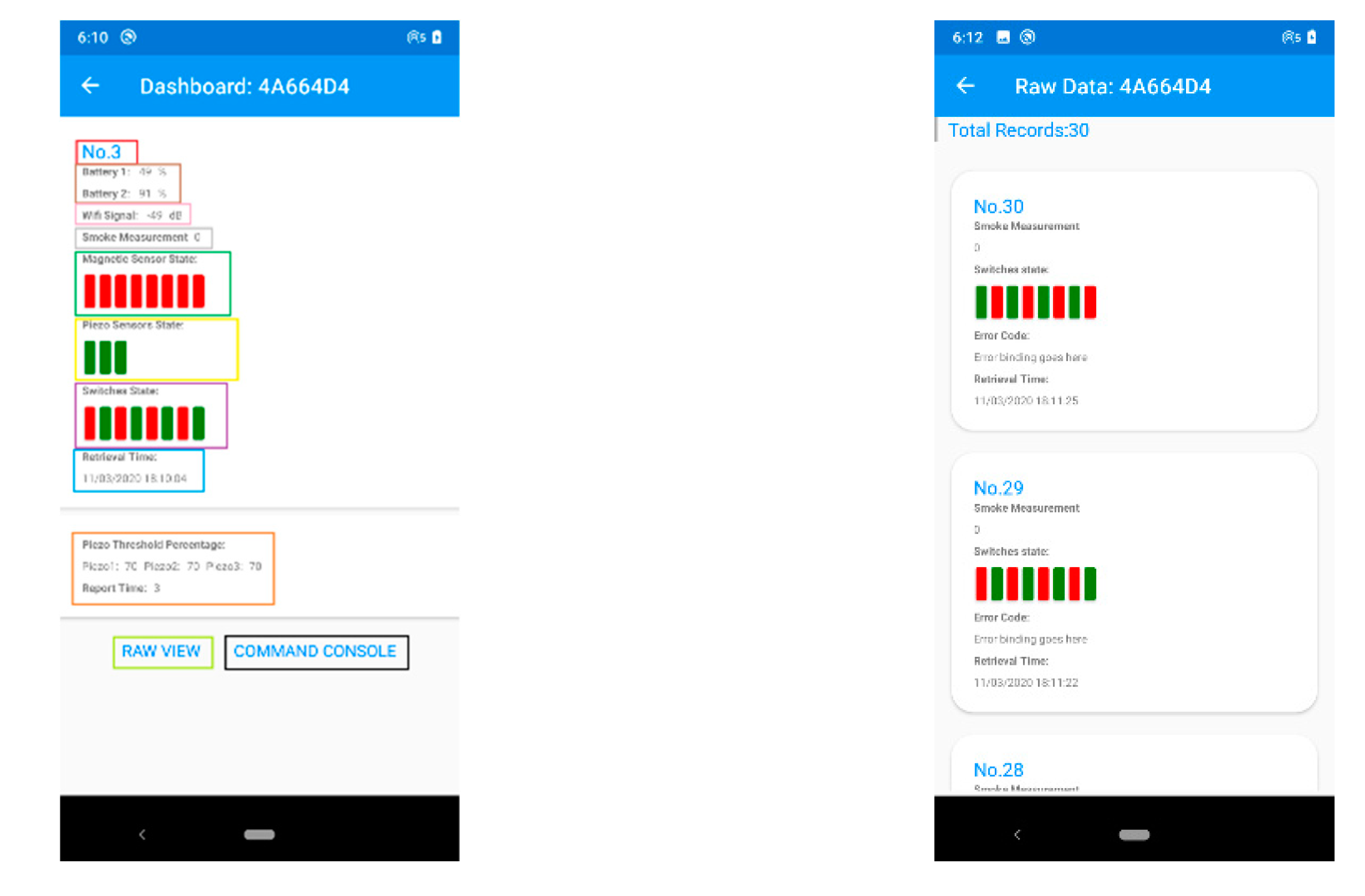
5.2. ULD Information and Raw Data Pages
- The number of Measurement packages;
- The percentage level of the ULD’s Batteries;
- Strength of Wi-Fi signal in dB;
- Smoke measurement that comes from the smoke detector sensor;
- Color indicators for eight Magnetic Sensors. If the value of the sensor is above 3200, then the indicator of the Magnetic is “Green”. Otherwise it is “Red”;
- Color indicators for three Piezo Sensors. If the value of the sensor is above a threshold, then the indicator of the piezo is “Red”. Otherwise it is “Green”;
- Color indicators for eight Digital Sensors. If the value of the sensor is 0, then the indicator of the sensor is “Green”. Otherwise it is “Red”;
- Package Date and Time;
- Piezo Sensors threshold and ULD report time in seconds.
5.3. Robotic Platform Dashboard Page
- Cabin Container slots that can set up from Cabin Setup Page and have color indicators for states: (i) container slot activity completed, (ii) container slot waiting for action, (iii) container slot in progress, (iv) container slot selected for action, and (v) Container Slot Activity Error;
- Robotic Platform connecting ULD name and selection of Robotic Platform mode (Load/Unload);
- Robotic Platform Pipeline Modes buttons;
- Robotic platform Information: name, location, battery percentage, and signal strength in Db;
- Robotic Platform Message console with colored frame messages: (i) Prompt Messages that prompt for user action, (ii) Warning Messages (i.e., “Low Battery”,” Weak Signal”), (iii) Error Messages Ongoing, task will be interrupted;
- Alarm Frame which is used to present real-time alarms from Robotic Platform Pipeline;
- Emergency Stop Button that, when tabbed, stops all actions from the Robotic Platform and releases two buttons fort the user: (i) Continue Button that continues the action of the Robotic Platform, (ii) Disable Button that disables the Robotic Platform after the user accepts the popup security notification;
- Robotic Platform Pipeline control buttons: (i) GoHome Button that moves the Robotic Platform to Home Position, (ii) Connect Button, connecting Robotic Platform to ULD, (iii) Load Button, loading ULD after a user selects a Container Slot for Loading Mode and Unload ULD from Selected Container Slot for Unloading Mode, (iv) Unlock Button, which sets connected ULD to “Lock” state to Unlocking ULD from Container Slot and then sets the ULD back to “Idle” state after unlocking is completed, (v) Lock Button sets the connected ULD to “Lock” state to locking ULD to selected Container Slot and then sets the ULD back to the “Idle” state after locking is completed;
- Robotic Platform Pipeline control buttons have colored states to indicate actions: (i) waiting for future actions, (ii) action in progress, (iii) action completed, and (iv) action Error.
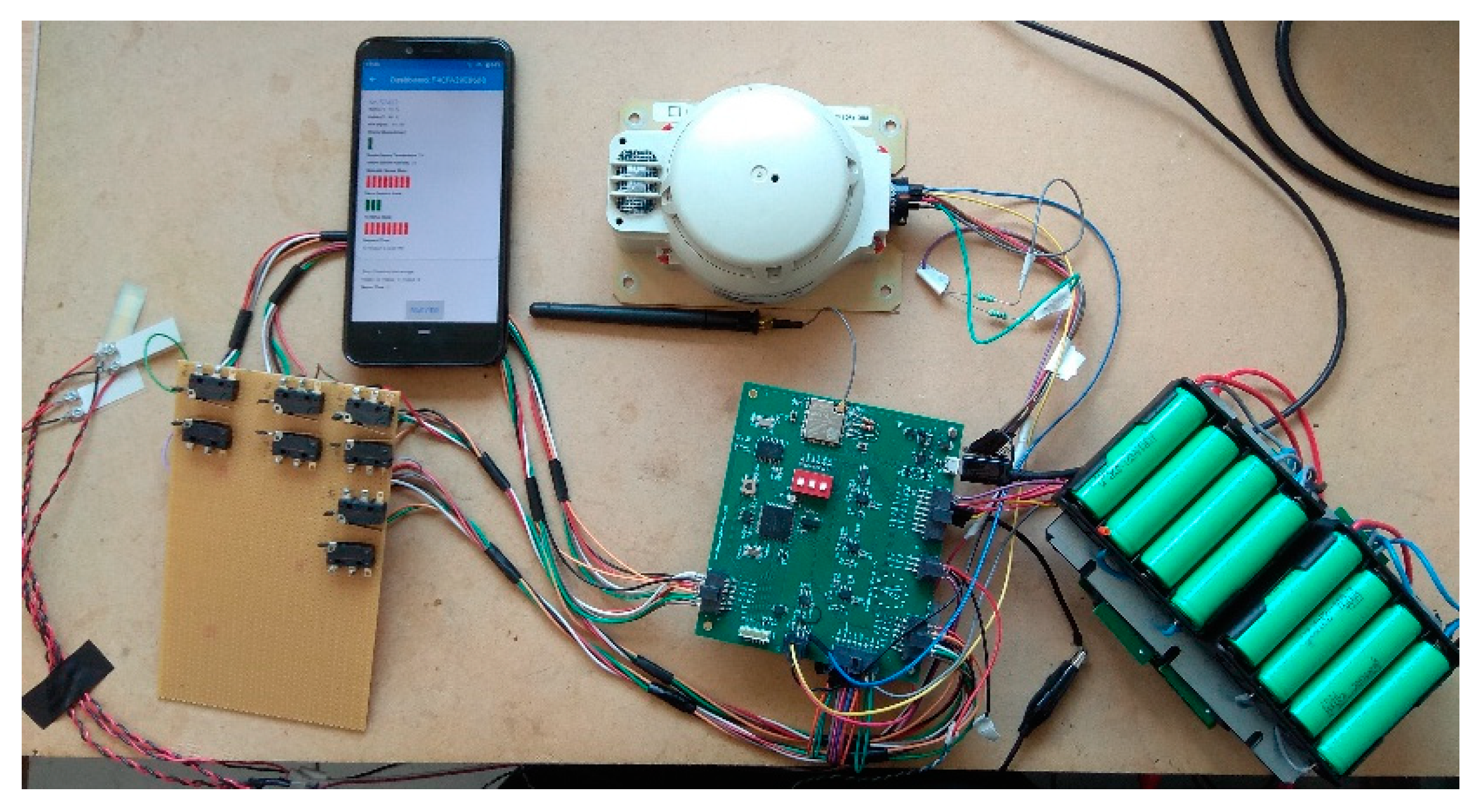
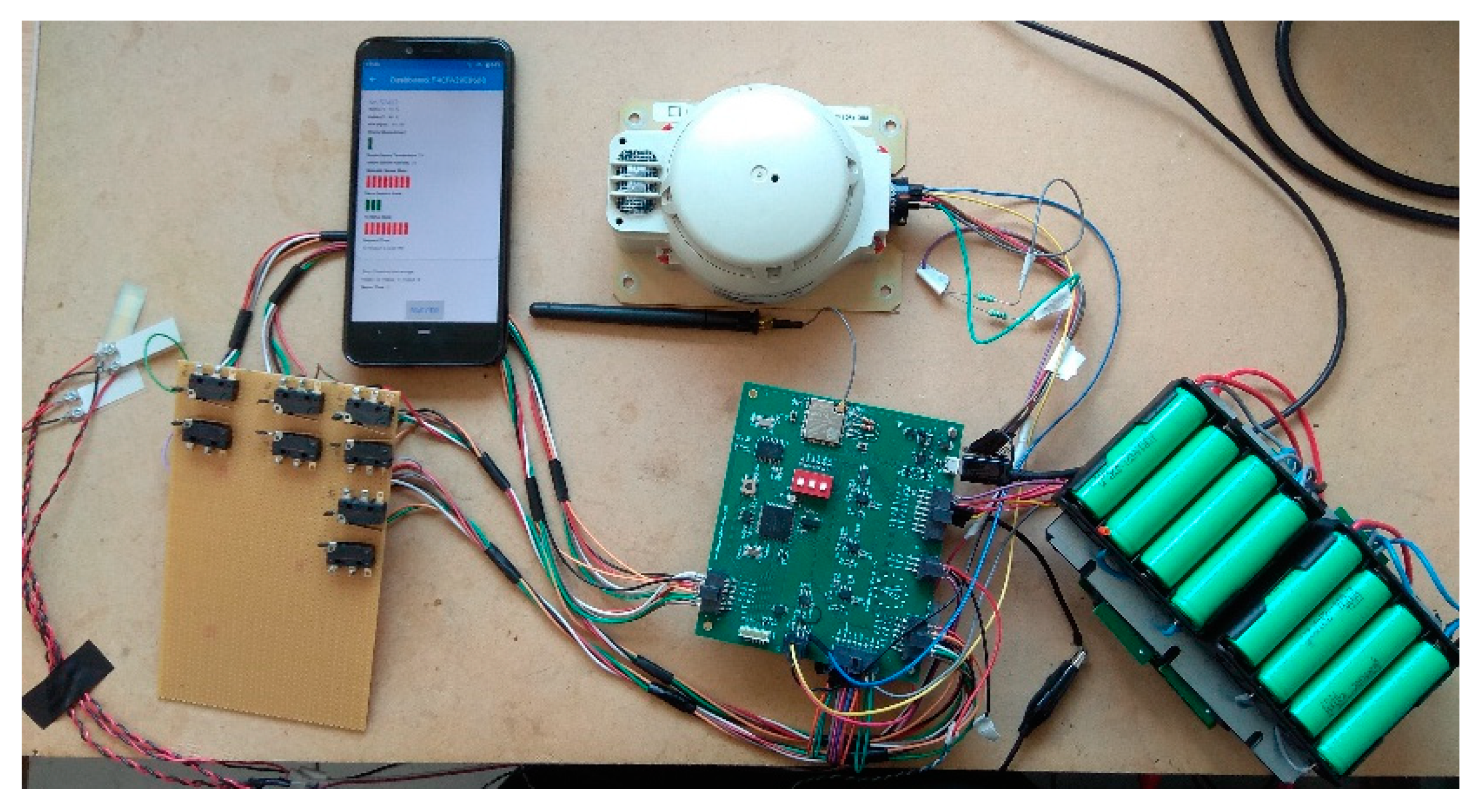
6. Proof of Concept Testing
6.1. Hardware (HW) Component’s Verification
6.1.1. Accuracy and Stability Testing
6.1.2. System Testing
6.2. Software (SW) Module Testing
6.2.1. Static Testing
6.2.2. Dynamic Testing
6.2.3. Passive Testing
6.2.4. Data Validation
6.2.5. User Acceptance
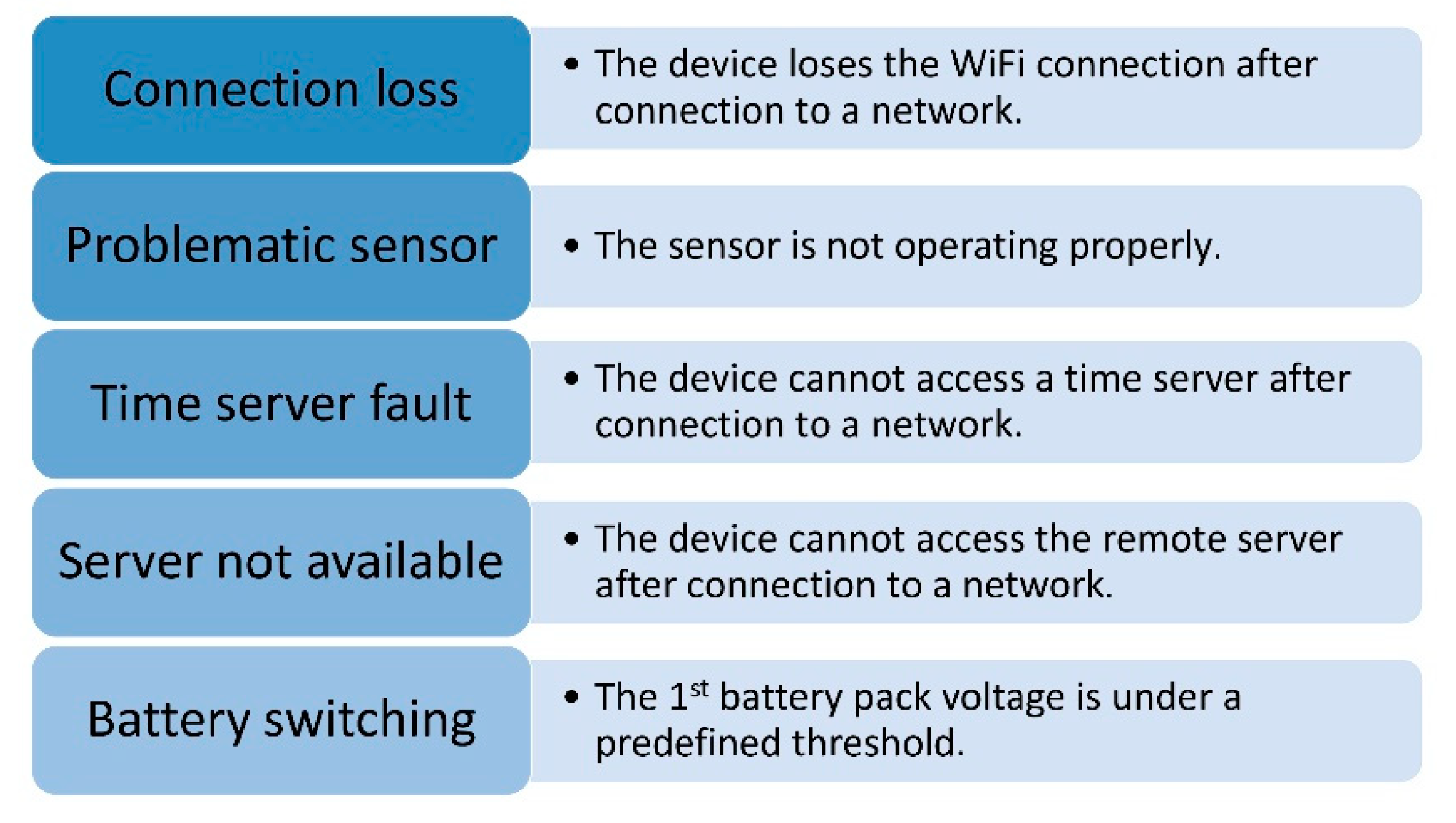
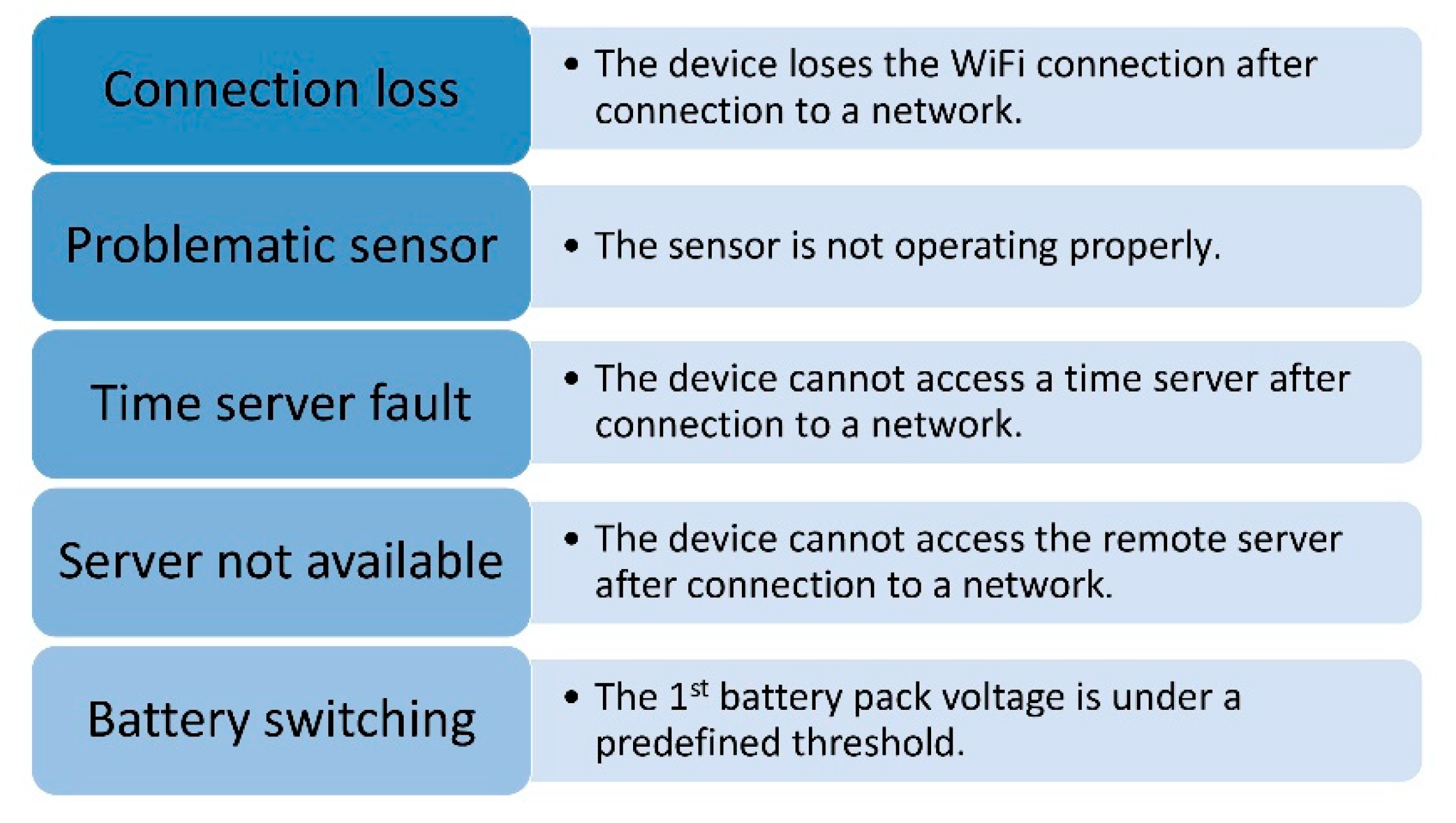
6.3. Fault Tree Analysis
6.4. General Outcome of Laboratory Testing
7. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Snow, C.; Håkonsson, D.; Obel, B. A smart city is a collaborative community: Lessons from smart Aarhus. Calif. Manag. Rev. 2016, 59, 92–108. [Google Scholar] [CrossRef]
- Khan, M.S.; Woo, M.; Nam, K.; Chathoth, P.K. Smart city and smart tourism: A case of Dubai. Sustainability 2017, 9, 2279. [Google Scholar] [CrossRef] [Green Version]
- Tesoriere, G.; Campisi, T.; Canale, A.; Severino, A.; Arena, F. Modelling and simulation of passenger flow distribution at terminal of Catania airport. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2018; Volume 2040, p. 140006. [Google Scholar]
- Emde, S.; Abedinnia, H.; Lange, A.; Glock, C.H. Scheduling personnel for the build-up of unit load devices at an air cargo terminal with limited space. OR Spectrum 2020, 42, 397–426. [Google Scholar] [CrossRef]
- Allam, Z.; Jones, D.S. On the coronavirus (COVID-19) outbreak and the smart city network: Universal data sharing standards coupled with artificial intelligence (AI) to benefit urban health monitoring and management. Healthcare 2020, 8, 46. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IATA. Available online: https://www.iata.org/en/programs/cargo/unit-load-devices/ (accessed on 21 June 2021).
- Safety Alert for Operators (SAFO) 16001 (1/19/16). Available online: http://www.faa.gov/other_visit/aviation_industry/airline_operators/airline_safety/safo (accessed on 21 June 2021).
- EASA, Certification Specifications for Large Aeroplanes—Cs-25, no. September. 2008. Available online: https://www.easa.europa.eu/certification-specifications/cs-25-large-aeroplanes (accessed on 21 June 2021).
- Baxter, G.; Kourousis, K. Temperature controlled aircraft unit load devices: The technological response to growing global air cargo cool chain requirements. J. Technol. Manag. Innov. 2015, 10, 157–172. [Google Scholar] [CrossRef] [Green Version]
- Kharoufah, H.; Murray, J.; Baxter, G.; Wild, G. A review of human factors causations in commercial air transport accidents and incidents: From to 2000–2016. Prog. Aerosp. Sci. 2018, 1, 1–3. [Google Scholar] [CrossRef]
- Kupfer, F.; Meersman, H.; Onghena, E.; Van de Voorde, E. The underlying drivers and future development of air cargo. J. Air Transp. Manag. 2017, 1, 6–14. [Google Scholar] [CrossRef]
- Lange, A. Does cargo matter? The impact of air cargo operations on departure on-time performance for combination carriers. Transp. Res. Part A Policy Pract. 2019, 1, 214–223. [Google Scholar] [CrossRef]
- Brandt, F.; Nickel, S. The air cargo load planning problem-a consolidated problem definition and literature review on related problems. Eur. J. Oper. Res. 2019, 1, 399–410. [Google Scholar] [CrossRef]
- Feng, B.; Li, Y.; Shen, Z.J. Air cargo operations: Literature review and comparison with practices. Transp. Res. Part C: Emerg. Technol. 2015, 1, 263–280. [Google Scholar] [CrossRef]
- Verstichel, J.; Vancroonenburg, W.; Souffriau, W.; Vanden Berghe, G. A mixed-integer programming approach to the aircraft weight and balance problem. Procedia Soc. Behav. Sci. 2011, 20, 1051–1059. [Google Scholar] [CrossRef]
- Lurkin, V.; Schyns, M. The airline container loading problem with pickup and delivery. European J. Oper. Res. 2015, 244, 955–965. [Google Scholar] [CrossRef] [Green Version]
- Rojek, J.; Rosenfeld, R.; Decker, S. The influence of driver’s race on traffic stops in Missouri. Police Q. 2004, 7, 126–147. [Google Scholar] [CrossRef]
- Dong, T.; Kim, N.H. Cost-effectiveness of structural health monitoring in fuselage maintenance of the civil aviation industry. Aerospace 2018, 5, 87. [Google Scholar] [CrossRef] [Green Version]
- Qing, X.; Li, W.; Wang, Y.; Sun, H. Piezoelectric transducer-based structural health monitoring for aircraft applications. Sensors 2019, 19, 545. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Wang, Y.C.; Soutis, C.; Gresil, M. Development of a fire detection and suppression system for a smart air cargo container. Aeronaut. J. 2021, 125, 205–222. [Google Scholar] [CrossRef]
- Yadav, A.; Agawal, A.; Sachwani, T. Design and analysis of an intelligent fire detection system for aircraft. Int. J. Eng. Technol. Manag. Res. 2018, 28, 260–273. [Google Scholar] [CrossRef]
- Interactive Cargo. Available online: https://www.iata.org/en/programs/cargo/e/interactive-cargo/ (accessed on 21 June 2021).
- Spandonidis, C.; Giordamlis, G. Data-centric operations in oil & gas industry by the use of 5G mobile networks and industrial Internet of Things (IIoT). In Proceedings of the 13th International Conference of Digital Telecommunication, Athens, Greece, 22–26 April 2018; p. 16. [Google Scholar]
- Spandonidis, C.; Tsantilas, S.; Giannopoulos, F.; Giordamlis, C.; Zyrichidou, I.; Syropoulou, P. Design and Development of a New Cost-Effective Internet of Things Sensor Platform for Air Quality Measurements. J. Eng. Sci. Technol. Rev. 2020, 13, 81–91. [Google Scholar] [CrossRef]
- Graham, D.; Van Veenendaal, E.; Evans, I. Foundations of Software Testing; Cengage Learning: Boston, MA, USA, 2008; pp. 57–58. ISBN 9781844809899. [Google Scholar]
- Theodoropoulos, P.; Spandonidis, C.C.; Themelis, N.; Giordamlis, C.; Fassois, S. Evaluation of different deep-learning models for the prediction of a ship’s propulsion power. J. Mar. Sci. Eng. 2021, 9, 116. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Feature | Specification | Quantity/ULD |
|---|---|---|---|
| RMS Processing Unit | System clock | 16-bit RISC up to 20-MHz | 1 |
| Ultra-low power consumption | 295 µA/MHz at 8 MHz, 3.0 V | ||
| Analog-to-Digital Converter (ADC) | 12-bit | ||
| Wireless Communication | Wi-Fi | 802.11 n (2.4 GHz) | 1 |
| Communication rate | up to 150 Mbps | ||
| Structural Health Monitoring (SHM) sensor | Output voltage | 100 mV to 100 V | 3 |
| Fire detection sensor | Siemens PCM1103-03 | Temperature-humidity | 1 |
| ULD lock sensors | Contact switches | 30 operations/min (max) | 8 |
| Position sensors | Sensitivity: 0.90 mV/Gauss | 8 |
| Operating System | Minimum Version | Target Version |
|---|---|---|
| Windows | Windows 10 | Windows 10 |
| Android | Android 5.0 (API Level 21) | Android 9.0 (API Level 28) |
| Product | Identifier | Description |
|---|---|---|
| Collector | RMC-C | Collector with different channels for sensor acquisition |
| Power Supply Unit (PSU) | RMC-PSU | Board for power management and distribution |
| Product | Identifier | Comments |
|---|---|---|
| Testing System | Pass | The prototype complies with system specifications |
| SW Module | Pass | N/A |
| Data Quality | Pass | Corrections in HW and SW performed before the final release |
| User Acceptance | Pass | Minor changes performed before the final release |
| Testing System in Non-normal conditions | Pass | The system responds satisfactorily in faulty conditions |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spandonidis, C.; Giannopoulos, F.; Petsa, A.; Eleftheridis, P.; Sedikos, E. A Data-Driven Situational Awareness System for Enhanced Air Cargo Operations Emergency Control. Smart Cities 2021, 4, 1087-1103. https://doi.org/10.3390/smartcities4030057
Spandonidis C, Giannopoulos F, Petsa A, Eleftheridis P, Sedikos E. A Data-Driven Situational Awareness System for Enhanced Air Cargo Operations Emergency Control. Smart Cities. 2021; 4(3):1087-1103. https://doi.org/10.3390/smartcities4030057
Chicago/Turabian StyleSpandonidis, Christos, Fotis Giannopoulos, Areti Petsa, Periklis Eleftheridis, and Elias Sedikos. 2021. "A Data-Driven Situational Awareness System for Enhanced Air Cargo Operations Emergency Control" Smart Cities 4, no. 3: 1087-1103. https://doi.org/10.3390/smartcities4030057
APA StyleSpandonidis, C., Giannopoulos, F., Petsa, A., Eleftheridis, P., & Sedikos, E. (2021). A Data-Driven Situational Awareness System for Enhanced Air Cargo Operations Emergency Control. Smart Cities, 4(3), 1087-1103. https://doi.org/10.3390/smartcities4030057