1. Introduction
Various approaches have been proposed to model the time series of real GNP, aiming to characterize long-term trends and their relationships with business cycles. Our focus is on modeling nonlinear time series that undergo structural changes, as well as addressing the issue of non-stationarity, which is common in economic data. Nonlinear time series data are types of data that do not follow linear patterns or functions, meaning the relationships between variables are unstable and can change over time. Structural changes refer to shifts in patterns that occur within the time series data. Linear time series models, such as the autoregressive integrated moving average (ARIMA), typically cannot capture the nonlinear patterns in data [
1,
2]. Consequently, time series models have been continuously developed to handle nonlinearity and accommodate structural changes.
One well-known approach is the Markov switching (MS) model, developed by Hamilton [
3], and its combination with the autoregressive (AR) model is referred to as the Markov switching autoregressive (MSAR) model. This model is designed to address structural changes resulting from data shifts over certain periods, a significant advancement from the traditional linear AR model described in [
4,
5]. MSAR divides data into several regimes, each of which follows its own AR model. The fundamental idea of this model is to dynamically adapt to changes in data patterns. These changes are influenced by a discrete, unobserved random variable referred to as a state or regime. By considering these unobserved regimes, the model facilitates transitions between those with predetermined probabilities. This approach effectively captures the non-stationarity of the distribution by introducing switches that reflect changes in not only hidden but also observed data.
The MSAR model has attracted considerable attention for its ability to analyze complex dynamics, including asymmetry and conditional heteroskedasticity, which can be readily estimated and interpreted [
6]. Extensive studies have fostered the development of this model across various extensions, and its application extends to a wide range of disciplines, especially within economics and finance [
3,
7,
8,
9,
10,
11]. Among the developments of the MSAR model is the MS model with autoregressive conditional heteroskedasticity (ARCH), which excels in handling long-term regime changes and short-term variability in time series data [
12,
13]. Some researchers have, furthermore, developed time series models incorporating flexible parameter movements, such as the MS model with time-varying transition probabilities (MS-TVTP) [
14], which has proven effective in explaining data movements. Another development is an MS model with a mixture distribution that does not require Gaussian white noise residuals [
15].
In addition, another approach used to address non-stationarity is the time-varying parameter (TVP) model. The TVP model is a time series model with parameters that vary over time [
16]. It can be considered a special case of the state-space model. This model handles structural changes that evolve over time. In its implementation, the TVP model allows parameters within the model to change over time, making it more flexible in modeling complex non-stationary time series data compared to the MSAR model [
17]. Based on the state-space framework initially introduced by Kalman [
18], the TVP model employs the Kalman filter algorithm for parameter estimation. Studies on the Kalman filter and TVP models show that state-space models can represent unobserved variables and forecast multiple interconnected time series with dynamic interactions [
19,
20,
21]. In the TVP model, the time-varying parameters are unobserved random variables that must be estimated using the observed data.
Considering the flexibility of state-space models and the capability of MS models to capture structural changes, several researchers have developed state-space models with Markov switching [
22,
23]. These models effectively handle dynamic changes in time series data structures by accommodating transitions between different regimes. This approach is highly flexible and allows for the estimation of various model classes that were previously difficult to perform. It has been further extended to include Markov switching heteroskedasticity [
24]. The principle of these models is to consider unobserved state vectors that include not only switching variables but also other variables in the model.
Apart from these advancements, several studies have explored the use of triplet Markov models (TMMs) to address similar issues in time series data. Meanwhile, other studies [
25] have developed deep parameterizations for pairwise and TMMs relevant to the unsupervised classification of sequential data, highlighting advancements in handling non-stationary parameters similar to the state-space with Markov switching models. Other research [
26] introduced a non-stationary normalized difference vegetation index (NDVI) time series modeling using triplet Markov chains, demonstrating the effectiveness of TMMs in capturing time-varying dynamics. Further studies [
27] discussed optimal recursive filtering and smoothing in non-Gaussian MS models, providing insights into the complexity of parameter estimation in similar models. Additionally, other work [
28] presented an application of TMMs for modeling consumer loan repayment behavior across business cycles, illustrating the practical relevance of TMMs in financial contexts. Nonetheless, it is crucial to recognize that these studies, along with previously mentioned MSAR and state-space models, have mainly concentrated on monitoring and analyzing current data rather than extending their application to forecasting. This reveals a notable gap in the literature that our research seeks to fill by utilizing such models for economic forecasting.
Considering the greater flexibility of the TVP model in modeling complex time series data, and the MSAR model’s strength in depicting nonlinear time series data by dividing it into multiple regimes, we developed a novel approach in this study. This new approach termed the Markov switching autoregressive model with time-varying parameters (MSAR-TVP) enhances the existing MSAR framework by integrating parameters that vary over time within each regime. Our model accounts for switching in the mean, AR coefficients, and error variance, with parameters assumed to follow an AR process that changes depending on the regime.
The main goal of this study was to develop and validate the effectiveness of the MSAR-TVP, an advanced method for analyzing and forecasting nonlinear time series data that underwent structural changes. This model was designed to enhance prediction accuracy by dynamically adjusting to new information and structural changes in economic data. Its specifications, suitable for nonlinear time series data that underwent stochastic structural changes, could handle complex data, which are typically difficult to explain with linear or nonlinear models with fixed parameters.
The MSAR-TVP model integrates the robustness of the MS framework with the flexibility of time-varying parameters, enhancing the accuracy of data behavior predictions. By leveraging the dynamics of regime changes, this model can estimate parameters associated with each regime and identify changes in the transition probability matrix. This approach provides more precise predictions of the behavior of nonlinear time series undergoing structural changes.
To validate the proposed MSAR-TVP model, we developed a parameter estimation methodology using maximum likelihood estimation (MLE), combined with the Kim filter, which integrates the Kalman filter, Hamilton filter, and Kim collapsing. Kim’s filtering scheme, which simplifies the information set for state-space models, enhances computational efficiency [
22,
23,
29]. The optimization of parameters was performed using the Nelder–Mead method, a technique for finding local minima without relying on function derivatives. This method has been effective in situations where derivatives of the objective function are difficult to determine or compute [
30,
31,
32]. The reliability and precision of the MSAR-TVP model were confirmed by measuring the mean absolute percentage error (MAPE) and mean absolute error (MAE).
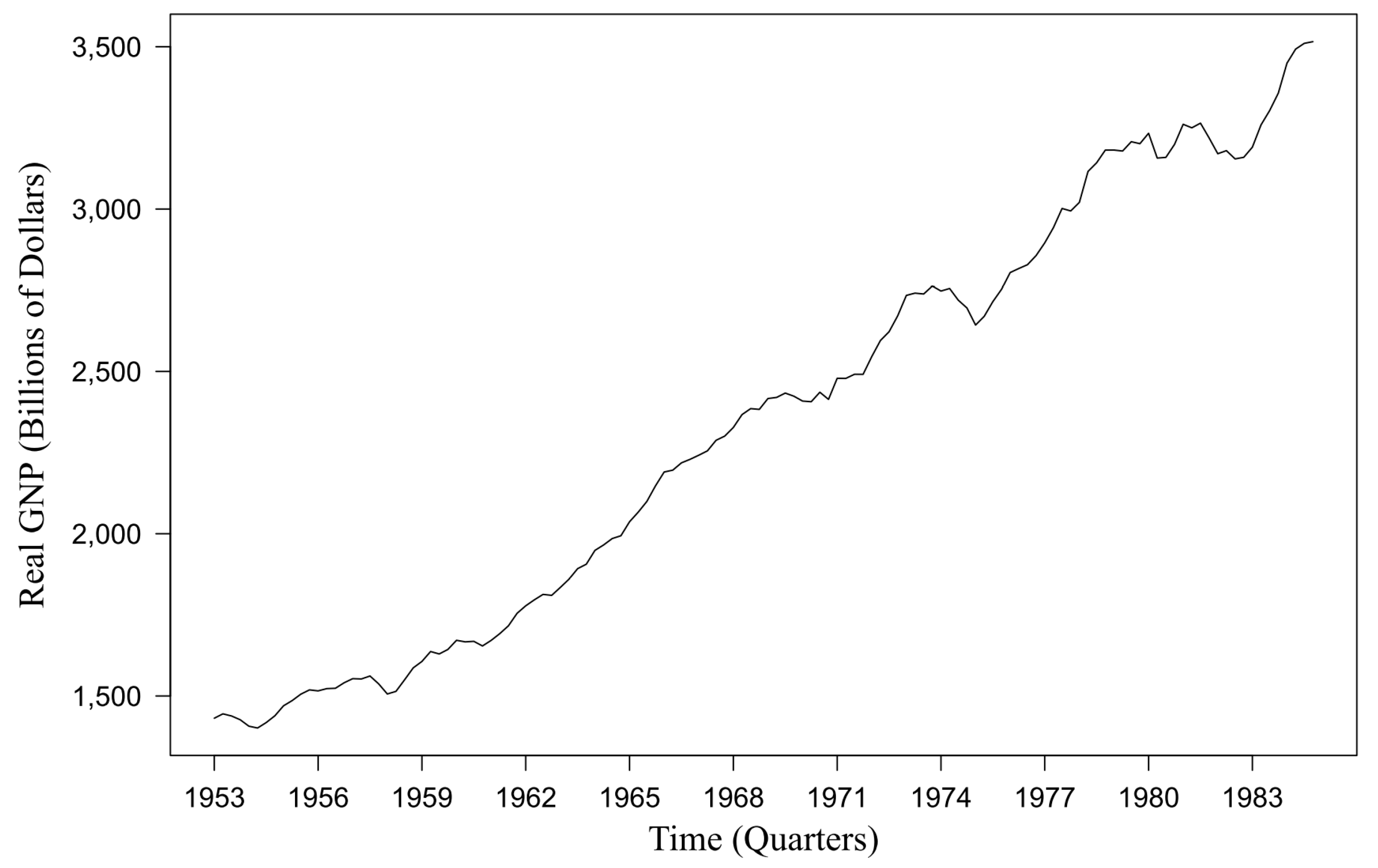
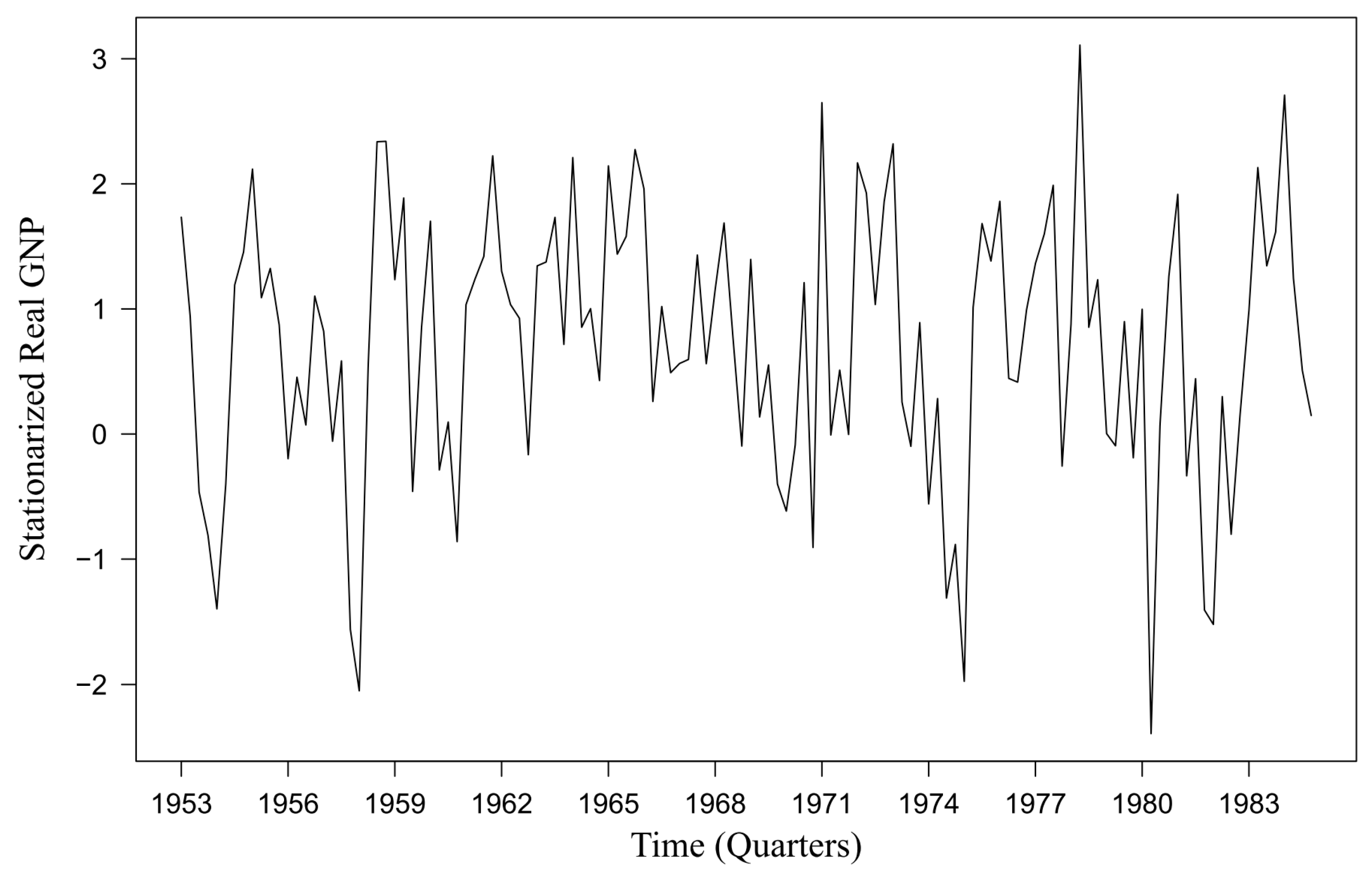
This study implemented the MSAR-TVP model on U.S. real GNP data, using Q3 1952 to Q4 1984 as in-sample data and Q1 1985 to Q4 1986 as out-of-sample data to evaluate its forecasting performance compared to the traditional MSAR model. Additionally, the model was applied to an extended dataset from Q1 1947 to Q1 2024 to demonstrate its forecasting effectiveness. The results show that the MSAR-TVP model improves forecasting accuracy, achieving lower MAPE and MAE values, and indicating superior predictive precision. The research also explored the model’s performance in detecting the duration of each state using average run length (ARL).
The application of this model to real GNP data provides new insights into the dynamics of economic growth. It utilizes an approach that adapts to rapid and significant economic changes, which is crucial for achieving sustainable economic growth. This adaptability enables models to respond to both short-term fluctuations and long-term structural shifts in the economy.
This research makes a significant contribution to the econometric forecasting literature by developing the MSAR-TVP model, designed to address non-stationarity and regime shifts in economic time series. By using the Nelder–Mead approach and the Kim filter, this model integrates efficient estimation techniques. It also allowed for dynamic parameter adjustments in response to new data and structural changes, thus ensuring more accurate and reliable predictions. In addition, this study also applied the MSAR-TVP model in forecasting economic data. The results of this study can not only enrich the academic literature but also provide a valuable practical tool for forecasters and policymakers to address complex economic challenges.
This paper is structured as follows:
Section 2 provides an overview of the fundamental model, delineates the development of the MSAR-TVP model, and explains the creation of the parameter estimation technique.
Section 3 presents the results.
Section 4 discusses the empirical findings and suggests future research directions. Finally,
Section 5 concludes the paper by summarizing the results.
2. Materials and Methods
2.1. State-Space Model
The state-space model, initially developed by Kalman [
18], is essential for illustrating the dynamics of systems characterized by unobservable state variables [
21,
33,
34]. The fundamental composition of this model comprises two main equations: first, the measurement equation, also known as the observation equation, and second, the transition equation, often referred to as the state equation. The measurement equation links the observed data with the unobservable state variables, while the transition equation describes the evolution of these state variables over time. The state-space model is defined as follows:
where
is the dependent variable at time
, for
;
is a vector of unobserved state variables at time
, sized
;
is the measurement matrix at time
that connects the state vector
with the observed measurement
, sized
;
is an observed exogenous variable, sized
;
is the matrix linking the exogenous variable
with the observed measurement
, sized
;
is a constant vector, sized
;
is the state vector at time
, sized
;
is a matrix whose elements can be data on the exogenous variable or constant parameters, sized
;
is the error term of the measurement equation, with
;
is the error term vector of the transition equation, with
;
is the variance of
; and
is the covariance matrix of
, sized
.
2.2. Time-Varying Parameter Model
The time-varying parameter (TVP) model, a specialized form of univariate time series models with parameters that vary over time, is part of the state-space models framework [
16,
18]. In this particular model, the matrix
in Equation (1) is substituted with
, which is a vector of explanatory variables, either exogenous or predetermined. Concurrently,
represents the time-varying parameters, indicative of structural changes occurring over time. Within this model, it is assumed that these parameters follow a first-order AR process. The formulation of the TVP model is as follows:
Here, each component within the error term vector is assumed to be mutually independent. Furthermore, the entire vector operates independently from the error term . Equation (3) serves as the measurement equation allowing for time-varying parameters, while Equation (4), the parameter transition equation, determines the movement of these parameters over time. In this research, the term “parameter transition equation” is used for the TVP model to emphasize that represents time-varying parameters.
In the TVP model, the explanatory variable
can be an exogenous or a predetermined variable. A predetermined variable’s value is established in advance, functioning either as an exogenous factor or as a lag of an endogenous variable [
35]. A specific variant of the TVP model, where
is an endogenous lag variable represented as
, is known as the time-varying coefficient autoregressive (TVAR) model. Essentially, the TVAR model is an AR model characterized by time-varying coefficients or parameters [
23,
36,
37,
38]. The TVAR model assumes that the error term
follows an i.i.d. normal distribution,
, and the error term in the parameter transition equation
also follows an i.i.d. normal distribution,
. These assumptions are also known as a Gaussian white noise process [
33].
The equation of the TVAR model, where the time-varying parameters follow an AR(1) process, can be written as follows [
38]:
where
is the dependent variable at time
;
is the time-varying coefficient of the
-th order AR at time
;
is the endogenous lag variable of
; and
is the AR coefficient of the
-th order in the parameter transition equation.
It should be noted that in Equations (5) and (6), the TVAR model does not include a constant or intercept. This approach is appropriate for cases where the time series is assumed to be stationary with a zero mean, suggesting that the model relies solely on previous lag values and the error term . This characteristic makes the TVAR model particularly suitable for data centered around zero or in situations where assuming a negligible long-term mean is justified.
2.3. Markov Switching Autoregressive Model
The Markov switching (MS) model is a sophisticated nonlinear time series model designed to address structural changes within data. This model is strategically crafted to adapt dynamically to changes in data patterns, which are impacted by an unobserved discrete random variable, , often labeled as the state or regime. is assumed to follow a first-order Markov chain, where the value of a state at any given period depends solely on the value of its immediately preceding state. It can take values of with representing the total number of states.
As defined by Hamilton, the MS model is described as follows [
7,
33,
39]:
where
is the dependent variable at time
;
is the mean at time
of the observed data, influenced by state changes;
is the error term at time
with
; and
is the variance of
, influenced by state changes. To capture the essential property of the Markov chain in an
-state, first-order Markov process, the transition probability matrix can be written as:
where
with
for all
, and
. These
values delineate the probability of transitioning from state
to state
, underlining the crucial role of this matrix in defining possible state transitions and their probabilities.
One of the simplest forms of integrating the MS model with another time series model is the Markov switching autoregressive (MSAR) model. Assuming that
follows an AR model of order
, the formulation of the MS model combined with AR of order
for
regimes, is referred to as
. The model is described as follows [
7,
9,
33,
40]:
where
is the endogenous lag variable of
with
;
is the mean at time
, influenced by state changes; and
is the AR coefficient of the
-th order. The transition probability matrix for the MSAR model is as shown in Equation (8). The means
and the variance of error
are defined as follows:
where
is a dummy variable that equals 1 if the current state
matches state
, and 0 otherwise.
Furthermore, Equation (9) can also be reformulated as:
where
and acts as the model’s constant or intercept.
The model could then be used in this study.
2.4. Markov Switching Autoregressive Model with Time-Varying Parameters
This study proposed an extension of the MSAR model, referred to as the Markov switching autoregressive model with time-varying parameters (MSAR-TVP). This model combines the MS framework with an AR model incorporating time-varying dynamics. The concept expands the MSAR into a state-space model representation, integrating time-varying parameters as specific time functions, aligned with the AR(1) process.
The development of the MSAR-TVP model involves adopting the configuration within the MSAR framework, indicating regimes, with each regime’s process adhering to an pattern. The model’s time-varying parameters are denoted as for each and . These parameters follow an AR(1) process.
Using the state-space model representation, the MSAR-TVP model equations can be defined as follows:
Parameter Transition Equation:
where
is the dependent variable at time
;
is the explanatory variable comprising the endogenous lag of
;
is the mean at time
of the observed data, influenced by state changes;
is the mean at time
of the observed data, influenced by state changes;
is the unknown time-varying parameter of the
-th order AR at time
, influenced by state changes;
is the
-th order AR coefficient in the parameter transition equation, influenced by state changes;
is the mean at time
in the
-th order AR in the parameter transition equation, influenced by state changes;
is the mean at time
in the
-th order AR in the parameter transition equation, influenced by state changes;
is the error term of the measurement equation, with
;
is the error term of the parameter transition equation, with
;
is the variance of
, influenced by state changes; and
is the variance of
, influenced by state changes.
In the MSAR-TVP model, as delineated by Equations (13) and (14), each parameter is contingent upon the subscript , which indicates the state variable. The random variable takes discrete values . The transition probabilities from one state to another are denoted by , where with for all , and . These transition probabilities can be represented in the transition probability matrix as defined in Equation (8).
Based on Equations (13) and (14), the MSAR-TVP model is articulated in matrix form as follows:
Measurement Equation:
where
and
,
Parameter Transition Equation:
where
and
for each
.
Furthermore, based on Equations (15) and (16), we define
The general state-space representation of the MSAR-TVP model can be expressed in vector and matrix notation as follows:
and the transition probabilities from one state to another, denoted by
, are represented in the transition probability matrix as shown in Equation (8).
2.5. Estimation Procedures
This section describes the parameter estimation process for the MSAR-TVP model, using a method based on the Kim filter algorithm. Originally introduced by Kim [
22], this algorithm was adapted in this study for the MSAR-TVP model. The approach integrates MLE with the Kalman and Hamilton filters to address the challenges posed by unobserved state vectors. In the MSAR-TVP model, the state vector comprises time-varying parameters that indicate changes in state or regime within the model.
This research formulated the parameter estimation algorithm for the MSAR-TVP model, considering the state-space representation in Equations (17) and (18). The focus was on cases where the AR order was
and the number of regimes was
, denoted as MS(2)-AR(1)-TVP. The model equations are given as follows:
where
and
. Meanwhile, the transition probability matrix is the same as in Equation (8) with
, and is given as follows:
where
and
.
The system defined by Equations (19) and (20) is elaborated as follows:
For
:
where
and
,
For
:
where
and
.
For and , at , the model represents an AR(1) with time-varying parameters in State 1, while at , it represents an AR(1) with time-varying parameters in State 2. Therefore, the MSAR-TVP model can be considered a dynamically time-varying AR(1) model with parameters influenced by state changes , with .
In the MS(2)-AR(1)-TVP model, there is one time-varying parameter
for each regime
. Classical approach parameter estimation using the Kim filter algorithm aims to form predictions of the time-varying parameter
based not only on
but also on the random variables
and
. Suppose
is the set of past information from the observed data up to time
. The parameter estimation
based on
, with
and
, denoted as
, can be formulated as follows:
The estimation of the parameter yields a set of predictions totaling
for each time
, corresponding to every possible value of
and
. Related to these predictions, there are
different variances. The variance of
, conditional on
and
, and denoted as
, can be formulated as follows:
Here, is the time-varying parameter at time , and is the prediction of this parameter at time based on information up to time .
The Kim filter algorithm is modified to estimate the parameters of the MSAR-TVP model. This algorithm is a combination of the Kalman filter, Hamilton filter, and Kim collapsing algorithms.
2.5.1. Kalman Filtering
The regime-dependent Kalman filter is used to estimate the time-varying parameters for each of the MSAR-TVP model. Conditional on and , the Kalman filter for the MS(2)-AR(1)-TVP model consists of the following series of recursive equations:
Updating:
where
is a constant in the parameter transition equation, calculated as
, with
as the mean at time
of the parameter;
is the estimation of
based on information up to time
, conditioned on
and
;
is the estimation of
based on information up to time
for
;
is the AR(1) coefficient in the parameter transition equation;
is the variance of
conditional on
and
;
is the estimation of
based on information up to time
for
;
is the conditional prediction error of
based on information up to
, with states
and
;
is the value of the variable
at time
, representing a lag of one period from the variable
;
is a constant in the measurement equation, calculated as
, with
as the mean at time
of the observed data;
is the conditional variance of
;
is the variance of
in the measurement equation;
is the variance of
in the parameter transition equation;
is the estimation of the model parameter
conditional on
and
;
is the estimation of the variance
, conditional on
and
.
In the regime-dependent Kalman filter algorithm, all notations are appended with the subscript
except for
and
as these estimates are within state
(two states), while other estimates must reflect the state transition from
to
(four states). For example,
and
differ in terms of conditional information.
However, in a two-regime system, and cannot be used for predicting the next state due to discrepancies both between and and between and . To resolve this issue of mismatch, a dimension reduction algorithm is required.
2.5.2. Kim Collapsing Procedure
Kim [
22] introduced a collapsing procedure, a method to reduce an
posterior matrix to an
matrix to complete the recursion of the Kalman filter. In this study, Kim’s collapsing algorithm has been adapted and developed for the MSAR-TVP model. This algorithm aims to condense the posterior matrix (
and
), which is
in size, into posteriors (
and
) sized
to complete the recursion of the Kalman filter above.
If
in Equation (32) represents
, then
where
represents
. Furthermore, if
in Equation (33) represents
, then
Subsequently, Equations (36) and (37) are used at the end of each iteration to combine the posterior matrix in Equations (32) and (33) into an matrix for the filter to function effectively. To accurately compute the above approximations, it is necessary to employ the Hamilton filter approach when calculating the probability components and .
2.5.3. Hamilton Filtering
The steps of the Hamilton filter for calculating and for , are as follows:
At the beginning of the
-th iteration, calculate:
where
is the transition probability.
Compute the joint density of
and
:
Next, calculate the marginal density of
, which is given by:
where
is the conditional density function. This function is derived based on the decomposition of the prediction error, i.e., the prediction error given the data. It corresponds to the probability density function of the normal distribution, characterized by the conditional prediction error and its associated conditional variance as detailed in Equations (30) and (31), respectively.
After observing
at the end of time
, the steps to update the probability components in Equation (38) are as follows:
with
The primary difference between this procedure and the basic Hamilton filter lies in the computation of the conditional density . For the MSAR-TVP model, the conditional prediction error and its associated conditional variance, derived from the Kalman filter recursion, are utilized. Upon obtaining the probability terms and , , the procedure for calculating the likelihood function using the Kim filter for the MSAR-TVP model can be implemented.
2.5.4. Integrated Filtering Techniques in MSAR-TVP Model Estimation
The summary of the MSAR-TVP model estimation is as follows:
Determine the initial values of and for the Kalman filter and for the Hamilton filter.
Execute the Kalman filter using Equations (28)–(33) to calculate for each
Run the Hamilton filter to compute and , for .
Apply the Kim collapsing procedure, utilizing the probability terms from Step 3, to reduce the posteriors in Equations (32) and (33) to using Equations (36) and (37).
Obtain the conditional density
for each
, as shown in Equation (40). The approximated log-likelihood function is then given by:
This process involves recursive steps that are performed iteratively for each with continuous information updating.
Subsequently, parameter estimation in the MSAR-TVP model is carried out through a nonlinear optimization procedure using the Nelder–Mead method [
31]. The Nelder–Mead method is a simplex-based optimization technique that does not require gradient information, making it suitable for nonlinear problems where derivatives are not readily available. It iteratively refines a simplex of solutions to approach the minimum of a function. The estimated parameters in the MS(2)-AR(1)-TVP model are represented as the parameter vector
. The estimation process begins by setting initial parameter values based on preliminary estimates or prior experience. Then, the ‘optim’ function in R programming language is employed to run the Nelder–Mead algorithm by adjusting
to maximize likelihood [
41]. Convergence criteria, such as a maximum number of iterations or a threshold for function value changes, are established to ensure the accuracy of the results. This process continues until convergence is achieved, yielding an optimal value
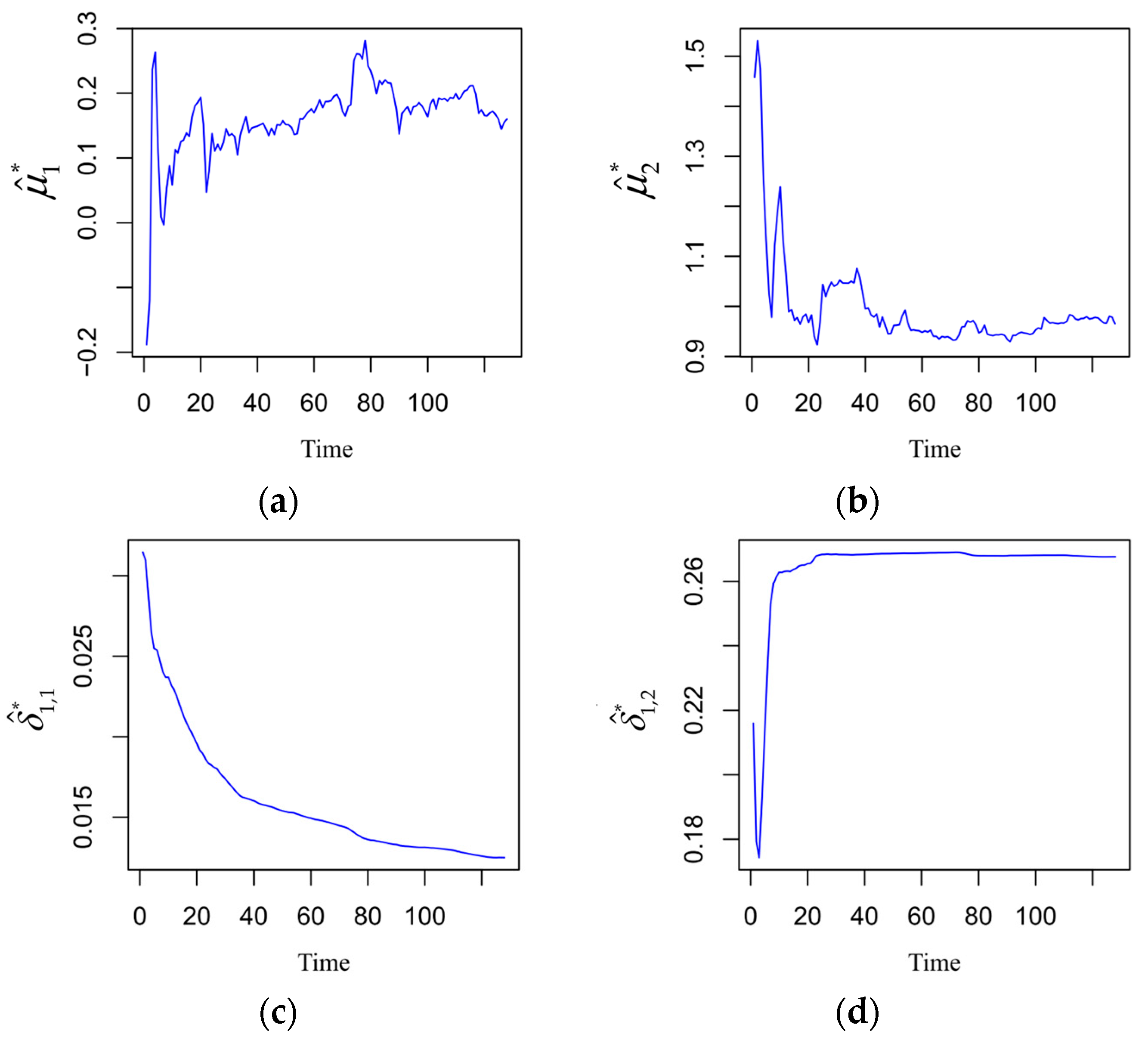
that provides the best estimate for the model parameters. In this context, “optimal” refers to the value that maximizes the likelihood function, and “best” indicates the highest likelihood, though it represents a local maximum due to the heuristic nature of the method.
2.6. Evaluation Techniques
The mean absolute percentage error (MAPE) and mean absolute error (MAE) are key metrics used to evaluate the accuracy of forecasting models [
42]. MAPE measures forecast accuracy as a percentage, making it particularly useful for explaining model performance to non-technical stakeholders. MAE measures the average magnitude of the errors in a set of predictions, without considering their direction, indicating the extent to which observed values deviate from model predictions. Lower MAPE and MAE indicate a better model fit and greater accuracy, respectively. MAPE is favored for its reliability, ease of interpretation, and comprehensive error information [
43].
The formulas for MAPE and MAE are defined as follows:
where
is the actual value and
is the predicted value.
Table 1 shows a range of MAPE values that can assess the efficacy of a forecasting model. According to Lewis [
44], the table includes typical MAPE values for industrial and business data along with their interpretations.
4. Discussion and Future Research Directions
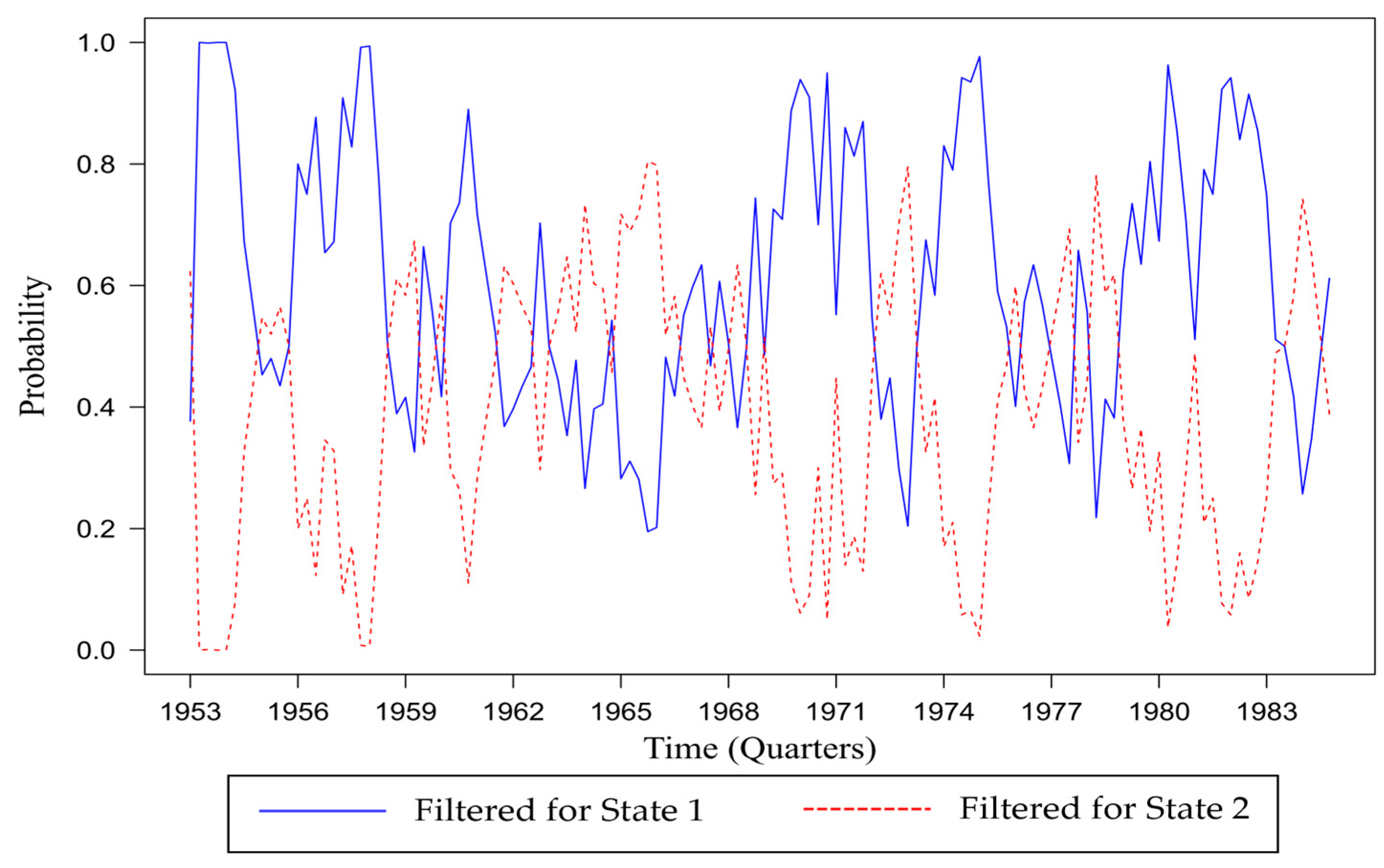
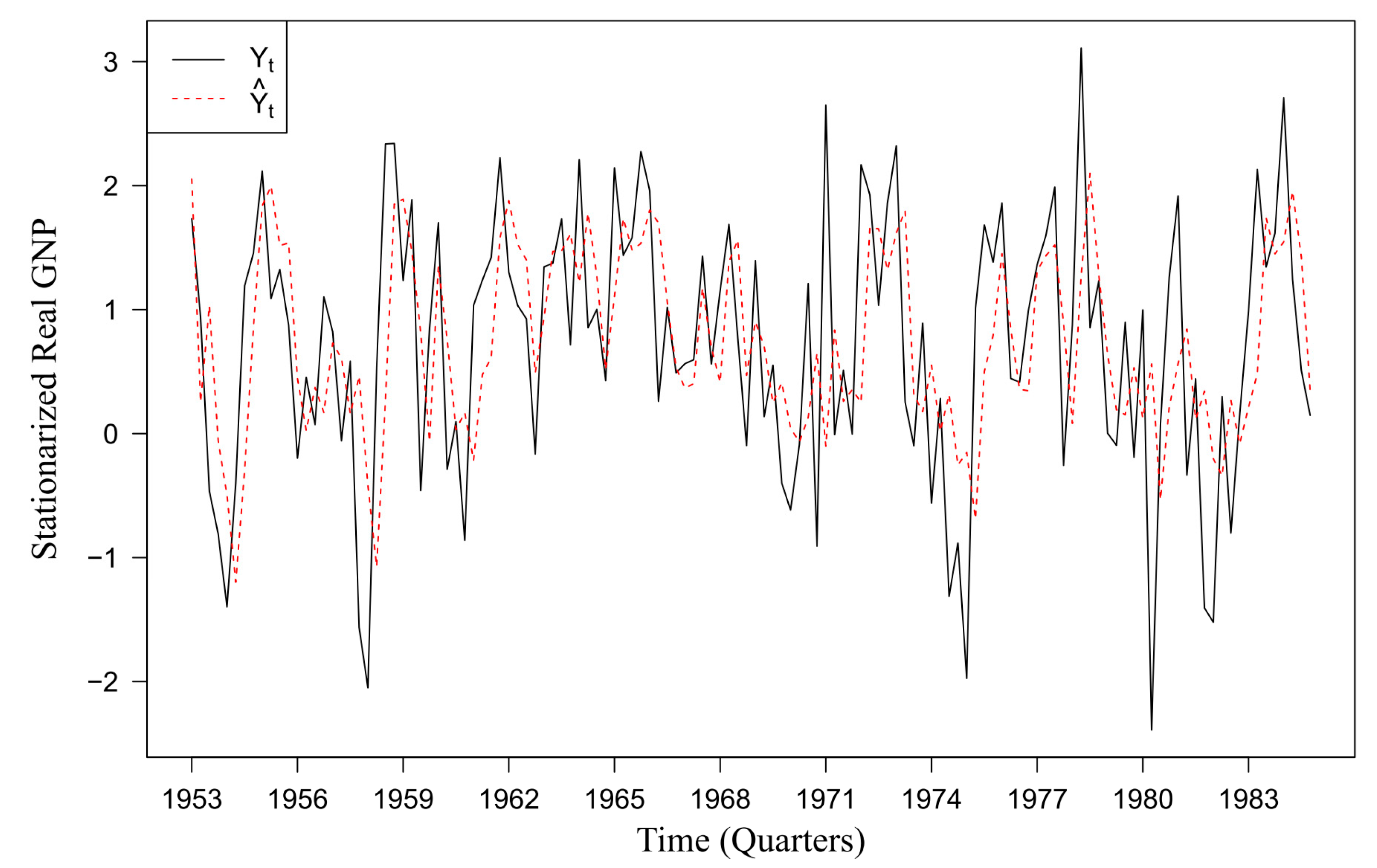
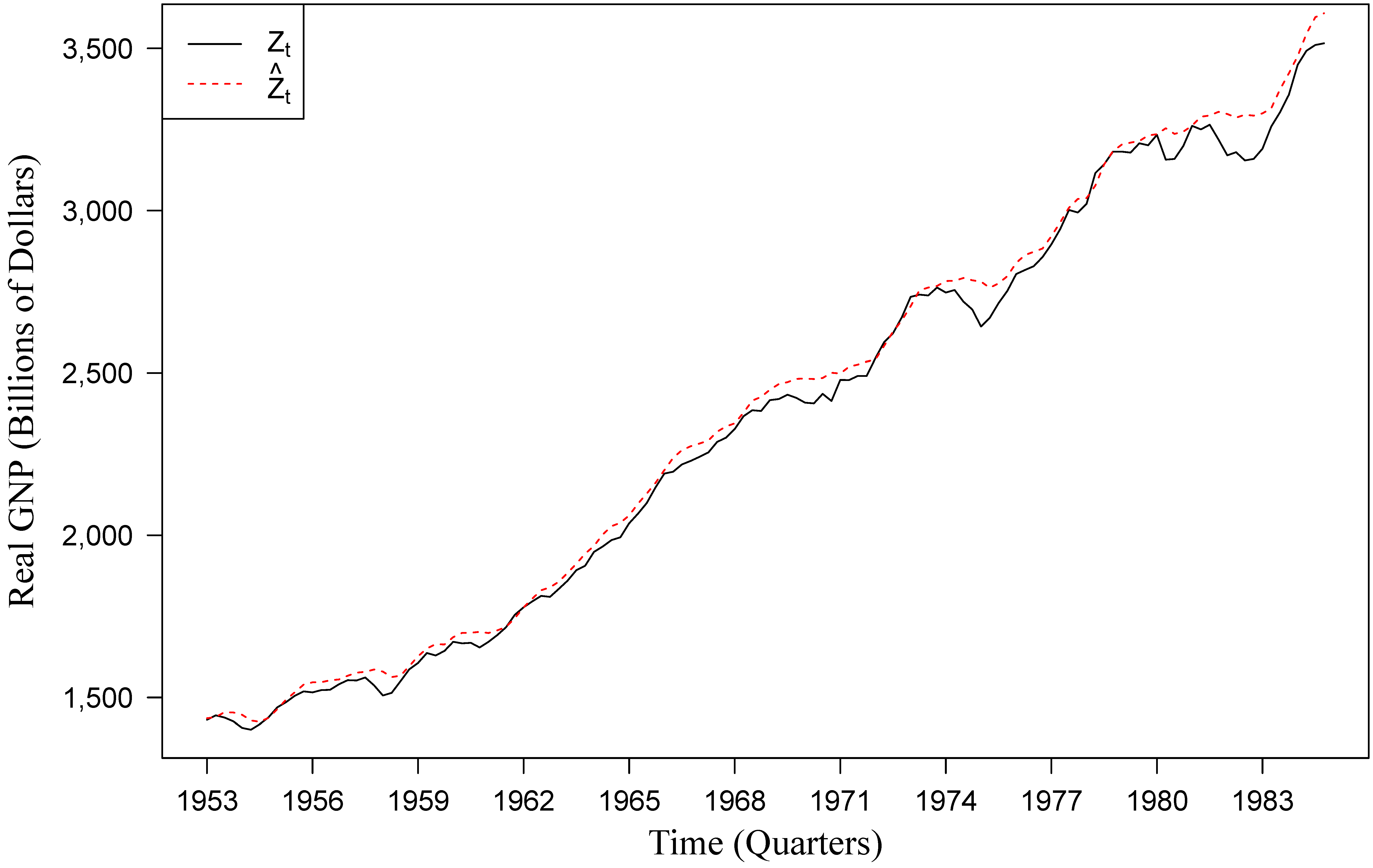
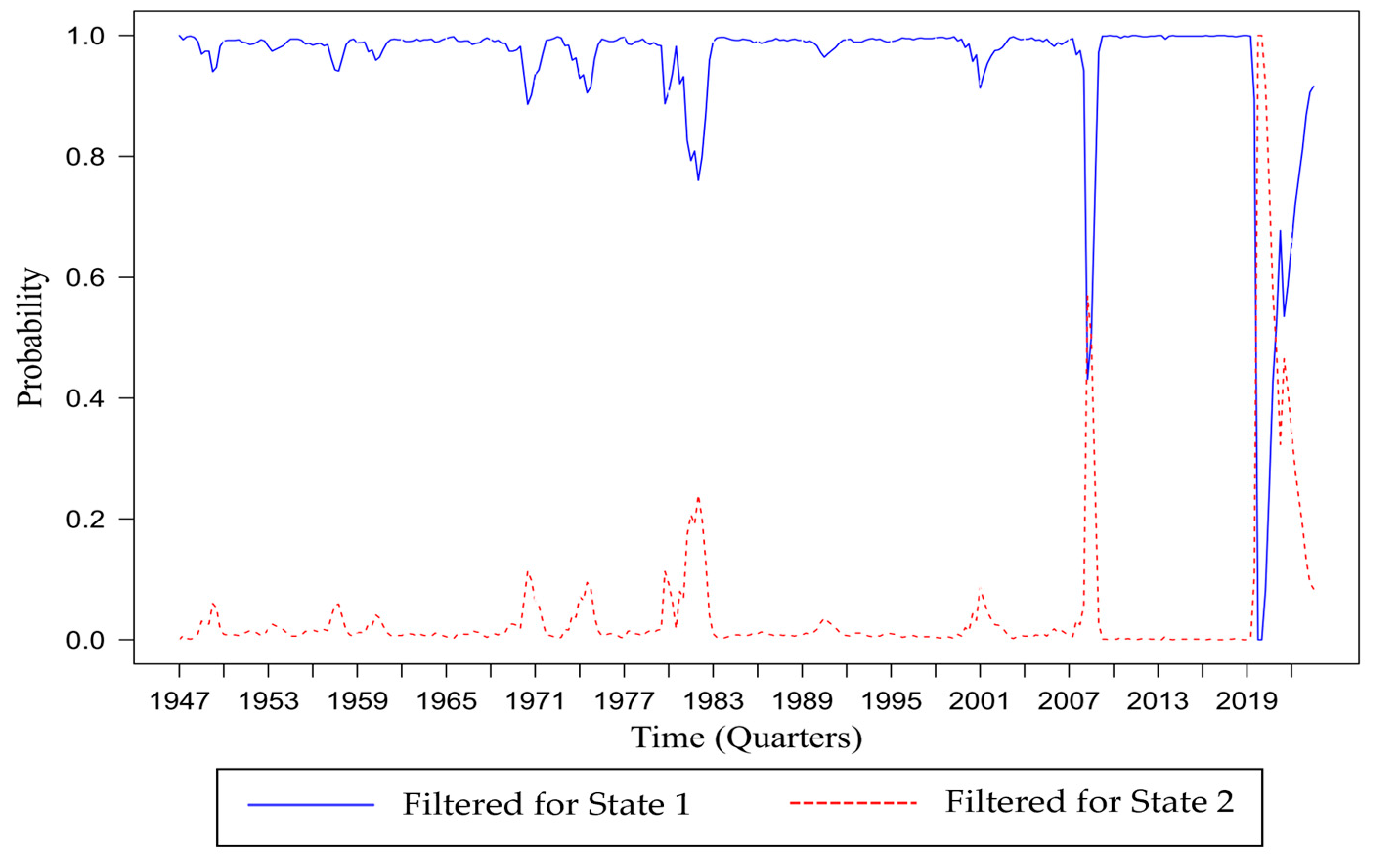
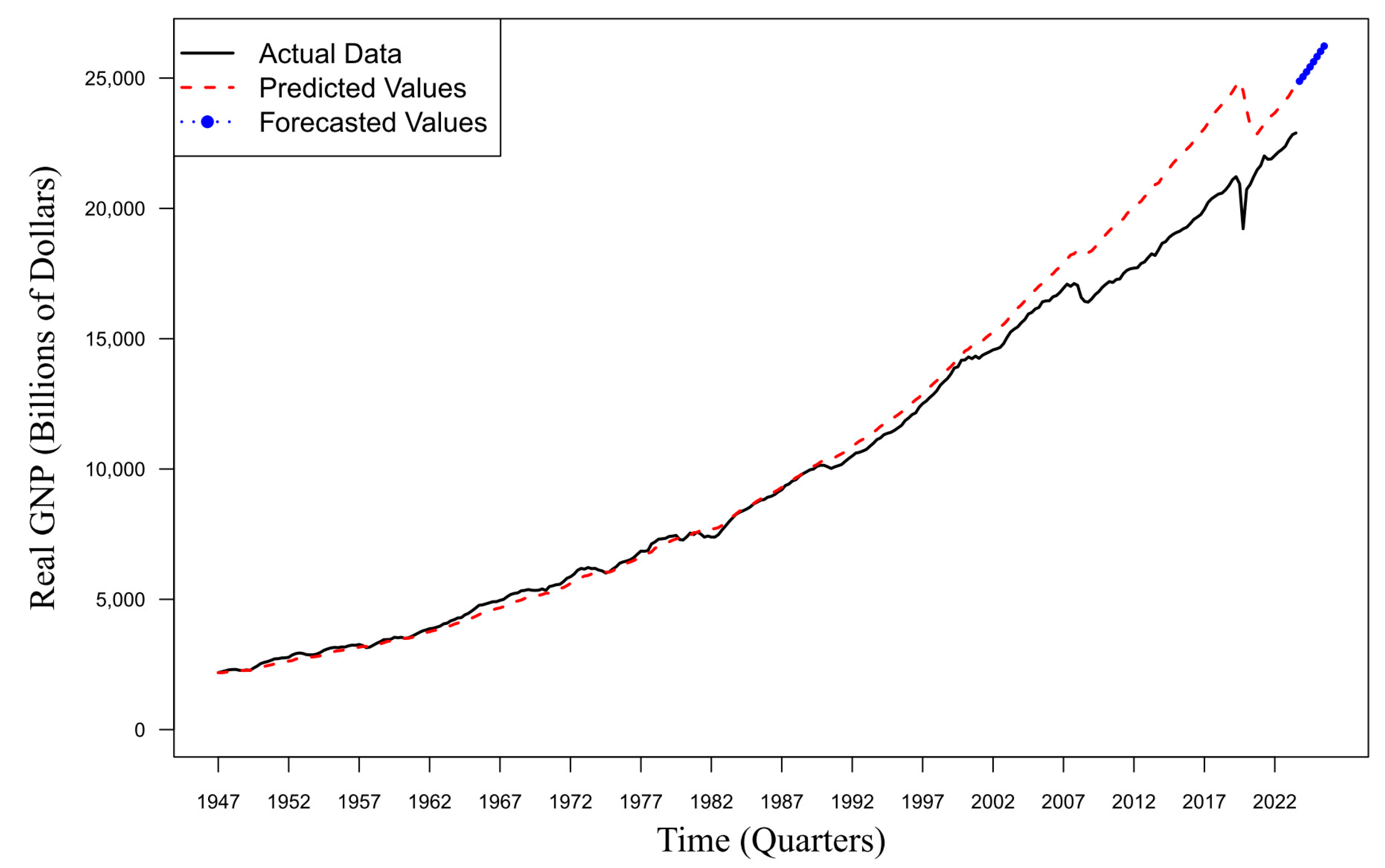
This study offers new insights into time series modeling and forecasting for data undergoing structural changes, such as U.S. real GNP, using the MSAR-TVP model. This model aims to handle nonlinear data that experience structural changes, addressing the non-stationarity inherent in economic data. Compared to the MSAR model, the MSAR-TVP model shows superior predictive accuracy with lower MAPE and MAE values. The model is effectively used for forward forecasting.
The time-varying parameters in the MSAR-TVP model allow it to adapt to data changes over time, providing more accurate estimates. The model’s flexibility and robustness make it suitable for short-term forecasting, as it can maintain high accuracy despite the increasing complexity of economic data. The outcomes demonstrate the MSAR-TVP model’s potential as a valuable tool for economic analysis and policy-making.
However, given the increasing complexity of economic data, there are several limitations to the current model that warrant consideration for future enhancements. The model currently assumes that each regime follows an AR(1) process, which simplifies computation but may limit its ability to capture more complex economic dynamics. Future research should explore increasing the AR order to more than one. Expanding the number of regimes beyond two could allow the model to capture a broader range of economic states and transitions, thus better reflecting the complexities of economic data. Additionally, incorporating residual errors that follow a non-Gaussian distribution [
51,
52,
53] could improve the model’s robustness, especially in the presence of outliers or heavy-tailed distributions.
Moreover, modifying the model by using pairwise Markov models (PMMs) instead of classical hidden Markov models (HMMs), which share some similarities with state-space models, is also compelling. PMMs can provide a more general framework and improve the efficiency of the proposed model [
54,
55,
56,
57]. Furthermore, the development of more advanced estimation methods, such as adopting a Bayesian approach to parameter estimation, could enhance the model’s flexibility and reliability, particularly for complex datasets. These enhancements could potentially improve the model’s adaptability and accuracy in forecasting complex economic dynamics.
5. Conclusions
In this study, we proposed the MSAR-TVP model, an adaptation of the MSAR model that incorporates time-varying parameters to address the challenges of nonlinear time series undergoing structural changes. This model combines the effective regime identification capability of the MSAR with the flexibility of time-varying parameters to enhance prediction accuracy. The MSAR-TVP model was evaluated using U.S. real GNP data from Q3 1952 to Q4 1984 as in-sample data and from Q1 1985 to Q4 1986 as out-of-sample data, comparing its performance to the conventional MSAR model. Additionally, the model was applied to an extended dataset from Q1 1947 to Q1 2024 to demonstrate its forecasting effectiveness.
The parameter estimation method for the MSAR-TVP model employs MLE enriched with the Kim filter, a fusion of the Kalman filter, Hamilton filter, and Kim collapsing. This approach, optimized through the Nelder–Mead algorithm, significantly enhances the accuracy and efficiency of data processing, allowing the model to dynamically respond to changes in the data while adhering to the assumptions of normal distribution and white noise residuals.
Overall, the findings indicate that the MSAR-TVP model, utilizing the developed parameter estimation method, provides a more precise and reliable framework for capturing economic fluctuations, particularly in identifying structural changes in the applied data cases. The model consistently outperforms the MSAR model in forecasting error metrics, both in-sample and out-of-sample, achieving lower MAPE and MAE values. The extended dataset from Q1 1947 to Q1 2024 further validated the model’s forecasting effectiveness, demonstrating its robustness and accuracy in predicting future economic trends.
The outcomes of this study demonstrate the MSAR-TVP model’s improved accuracy over the MSAR model. This advancement aids in better predicting economic fluctuations, supporting informed economic policy decisions and data-driven planning. The model’s performance underscores its potential utility in various forecasting applications, contributing to the development of econometric methods. While the model shows significant promise, it is important to consider its limitations and the potential for further refinement.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}