



Enhancing Fire Monitoring Method over Peatlands and Non-Peatlands in Indonesia Using Visible Infrared Imaging Radiometer Suite Data
 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. VIIRS Data Product Description
2.2. Data Types and Sources
2.2.1. Field Data and the Burned Area Map
2.2.2. Peatland Map
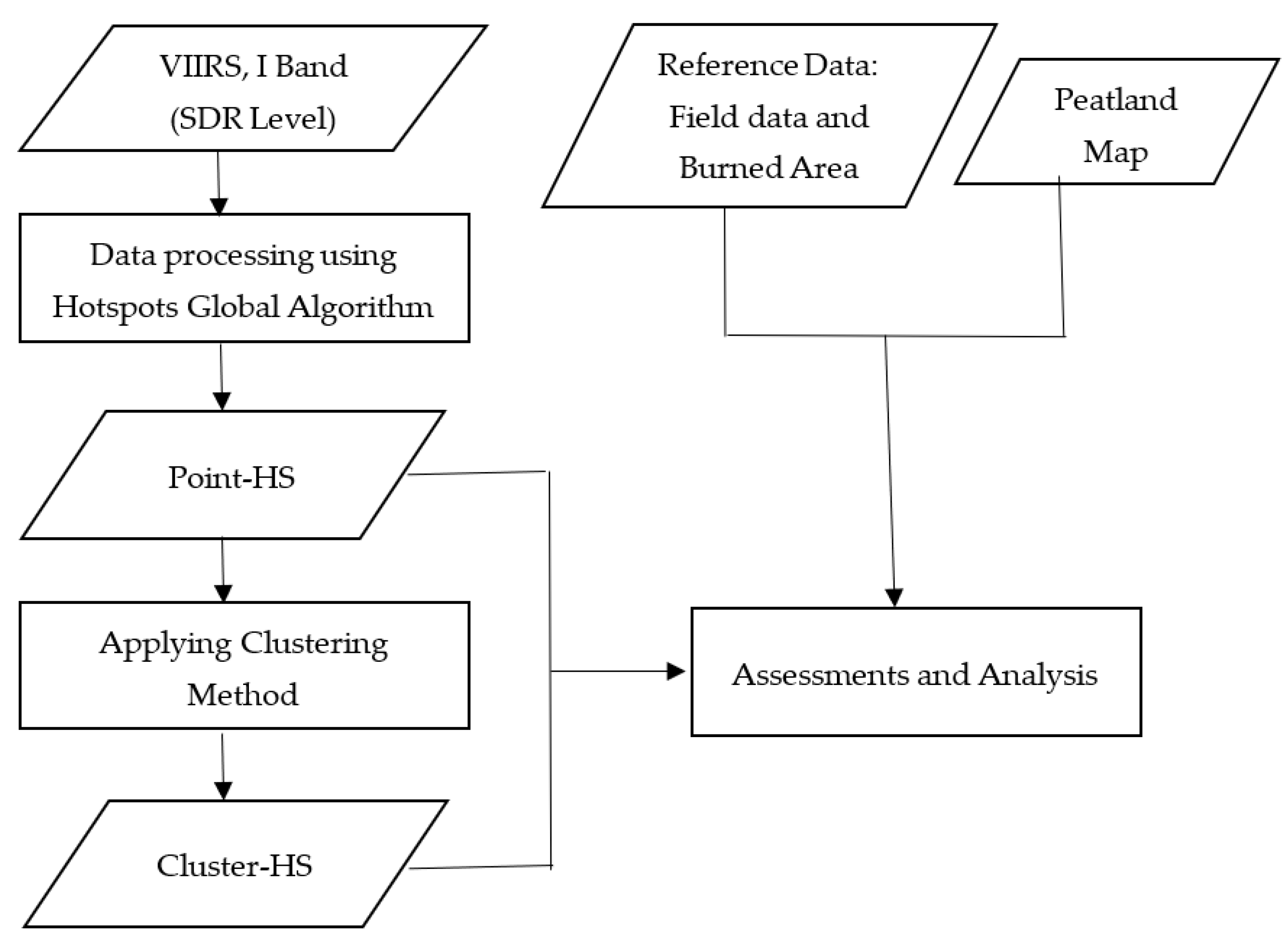
2.3. Research Method
2.3.1. Hotspot Clustering Method
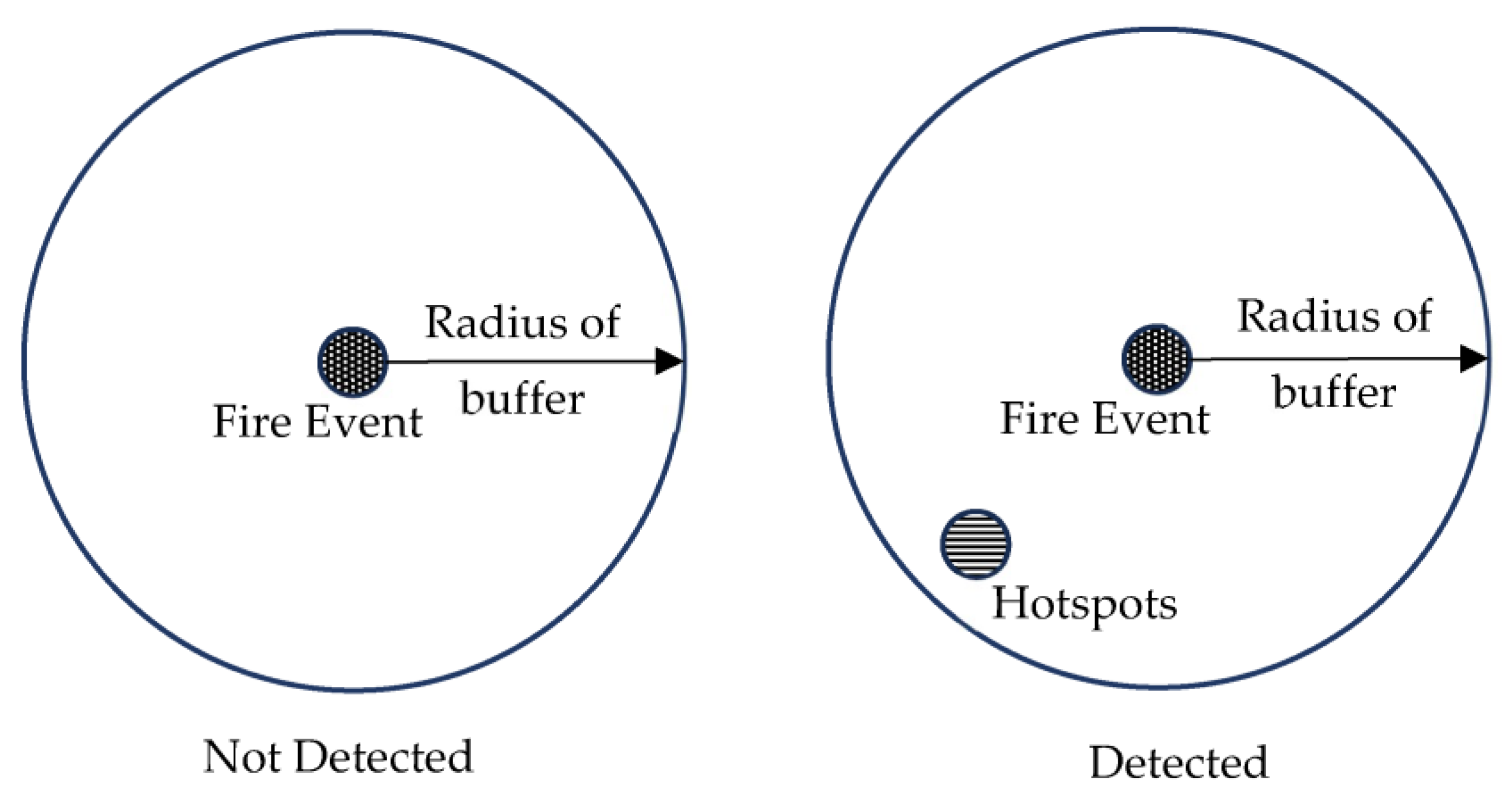
2.3.2. Assessments and Analysis
3. Results
3.1. Cluster-HS Product
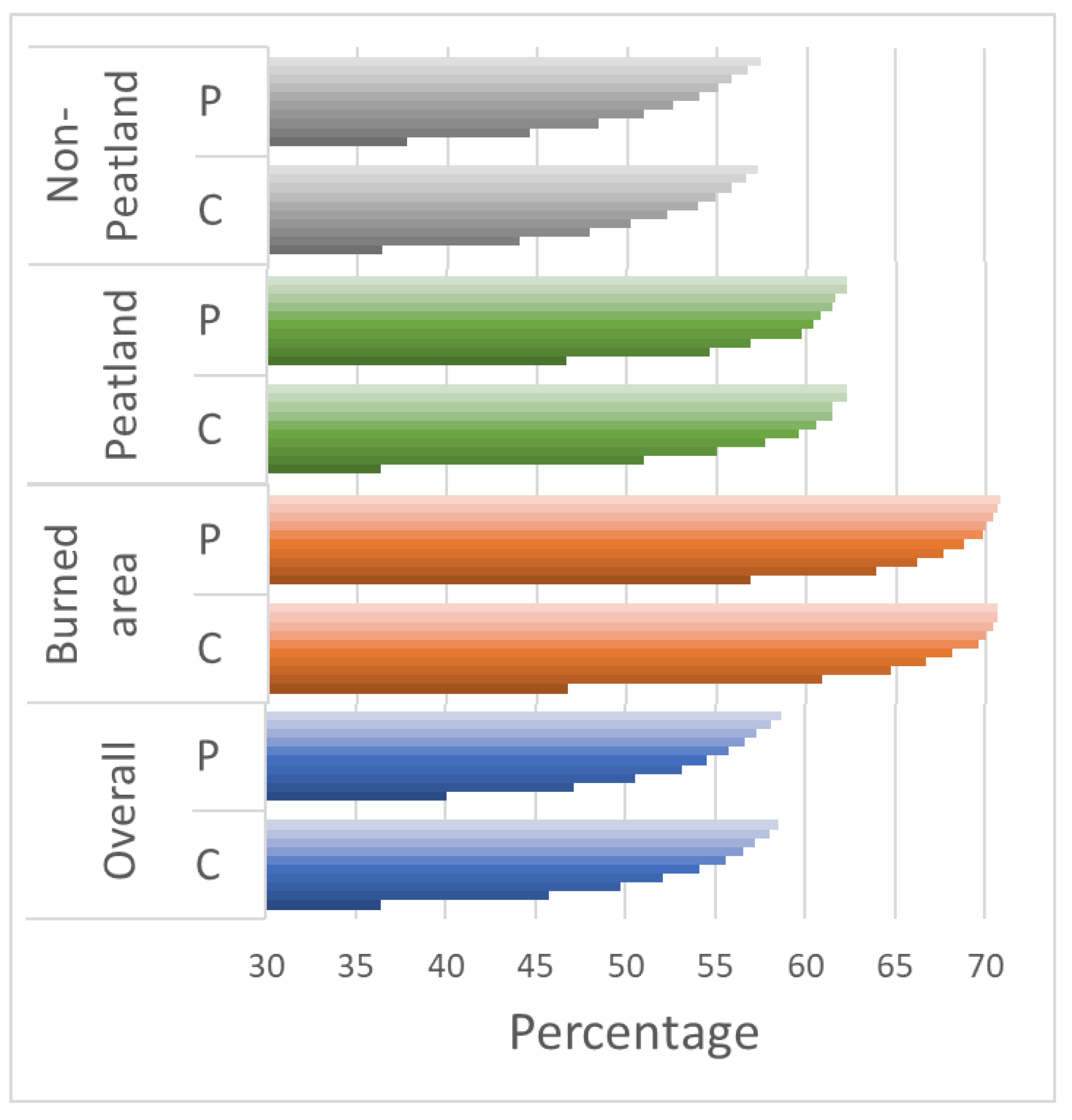
3.2. The Validation of the Clustered- and Point-Based Hotspots and their Relationship with Burned Areas
3.3. Clustered- and Point-Based Hotspot Validation with Peatlands and Non-Peatlands
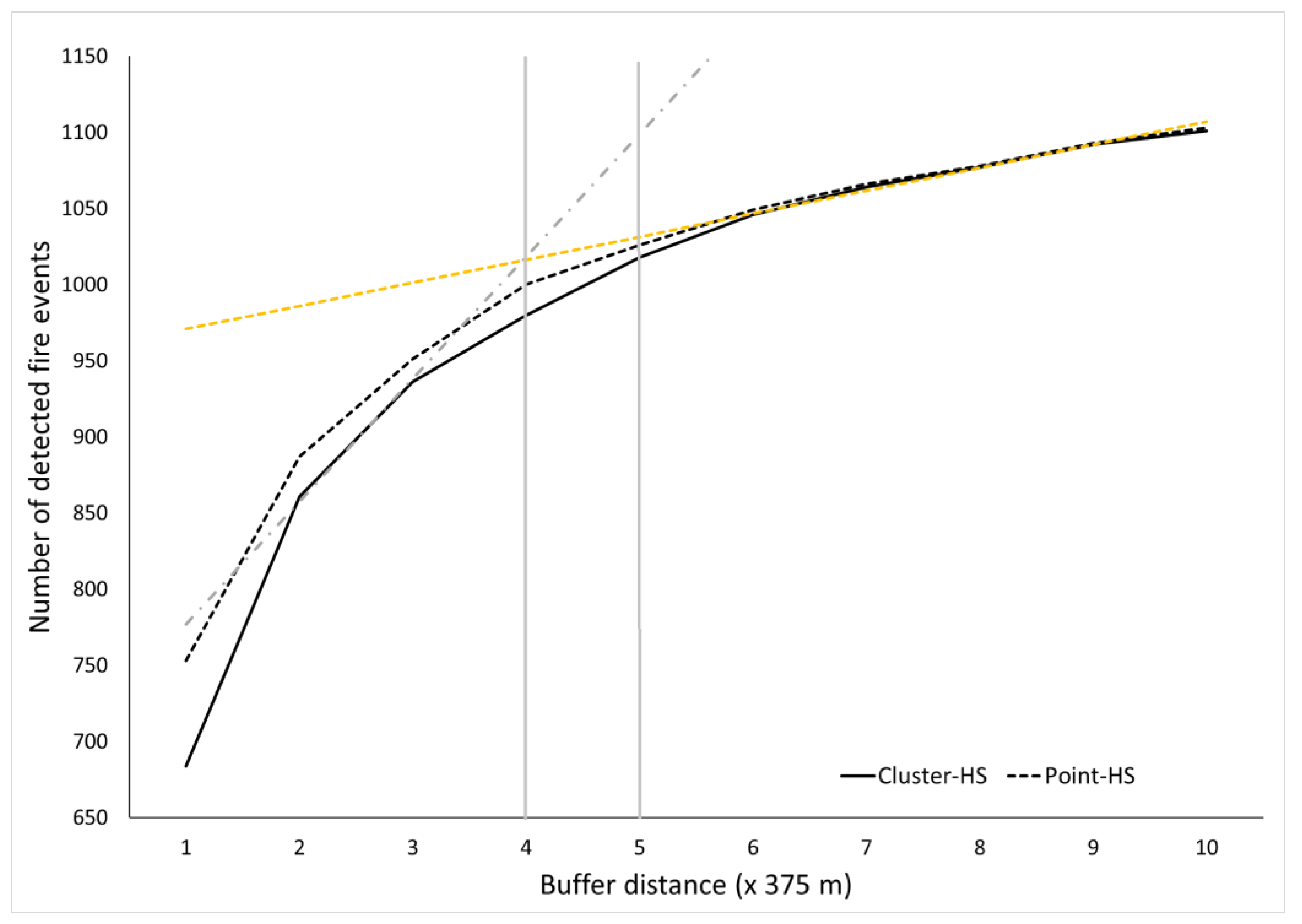
3.4. Clustered-Based Hotspot Assessment in Relation to Estimated Fire Size
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jeannette Glauber, A.; Moyer, S.; Adriani, M.; Gunawan Elitza Mileva, I.; Harimurti, P.; Farman Izhar, M.; Kendrick, A.; Henry Stirrett Wood, G. The Cost of Fire: An Economic Analysis of Indonesia’s 2015 Fire Crisis. The World Bank Indonesia Stock Exchange Building, Tower 2, 12th floor Jl. 2016. Available online: http://hdl.handle.net/10986/23840 (accessed on 1 August 2023).
- Show, D.L.; Chang, S. Atmospheric impacts of Indonesian fire emissions: Assessing remote sensing data and air quality during 2013 Malaysian haze. Procedia Environ. Sci. 2016, 36, 176–179. [Google Scholar] [CrossRef][Green Version]
- Kaskaoutis, D.G.; Kumar, S.; Sharma, D.; Singh, R.P.; Kharol, S.K.; Sharma, M.; Singh, A.K.; Singh, S.; Singh, A.; Singh, D. Effects of crop residue burning on aerosol properties, plume characteristics, and long-range transport over northern India. J. Geophys. Res. 2014, 119, 5424–5444. [Google Scholar] [CrossRef]
- Singh, P.; Dey, S. Crop burning and forest fires: Long-term effect on adolescent height in India. Resour. Energy Econ. 2021, 65, 101244. [Google Scholar] [CrossRef]
- Rangel, M.A.; Vogl, T. Agricultural Fires and Infant Health; Working Paper 22955; National Bureau Of Economic Research: Cambridge, MA, USA, 2016. [Google Scholar] [CrossRef]
- Rosales-Rueda, M.; Triyana, M. The Persistent Effects of Early-Life Exposure to Air Pollution: Evidence from the Indonesian Forest Fires. J. Hum. Resour. 2019, 54, 1037–1080. [Google Scholar] [CrossRef]
- Tan-Soo, J.S.; Pattanayak, S.K. Seeking natural capital projects: Forest fires, haze, and early-life exposure in Indonesia. Proc. Natl. Acad. Sci. USA 2019, 116, 5239–5245. [Google Scholar] [CrossRef] [PubMed]
- Endrawati, E.; Purwanto, J.; Nugroho, S.; Agung, R. Identifikasi Areal Bekas Kebakaran Hutan Dan Lahan Menggunakan Analisis Semi Otomatis Citra Satelit LANDSAT. Semin. Nas. Geomatika 2017, 2, 273–282. [Google Scholar] [CrossRef]
- Indradjad, A.; Purwanto, J.; Sunarmodo, W. Analisis Tingkat Akurasi Titik Hotspot Dari S-NPP VIIRS Dan Terra/Aqua MODIS Terhadap Kejadian Kebakaran (Accuracy Analysis of Hotspots from S-NPP VIIRS and Terra/Aqua MODIS to Fire Occurrences). J. Penginderaan Jauh dan Pengolah. Data Citra Digit. 2019, 16, 53–60. [Google Scholar]
- Atwood, E.C.; Englhart, S.; Lorenz, E.; Halle, W.; Wiedemann, W.; Siegert, F. Detection and Characterization of Low Temperature Peat Fires during the 2015 Fire Catastrophe in Indonesia Using a New High- Sensitivity Fire Monitoring Satellite Sensor (FireBird). PLoS ONE 2016, 11, e0159410. [Google Scholar] [CrossRef]
- Xie, Z.; Song, W.; Ba, R.; Li, X.; Xia, L. A spatiotemporal contextual model for forest fire detection using Himawari-8 satellite data. Remote Sens. 2018, 10, 1992. [Google Scholar] [CrossRef]
- Plank, S.; Fuchs, E.M.; Frey, C. A fully automatic instantaneous fire hotspot detection processor based on AVHRR imagery-A TIMELINE thematic processor. Remote Sens. 2017, 9, 30. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.J.; He, J.; Zhang, T. Improvements in high-temporal resolution active fire detection and FRP retrieval over the Americas using GOES-16 ABI with the geostationary Fire Thermal Anomaly (FTA) algorithm. Sci. Remote Sens. 2021, 3, 100016. [Google Scholar] [CrossRef]
- Li, F.; Zhang, X.; Kondragunta, S.; Schmidt, C.C.; Holmes, C.D. A preliminary evaluation of GOES-16 active fire product using Landsat-8 and VIIRS active fire data, and ground-based prescribed fire records. Remote Sens. Environ. 2020, 237, 111600. [Google Scholar] [CrossRef]
- Fuchs, E.-M.; Stein, E.; Strunz, G.; Strobl, C.; Frey, C. Fire Monitoring—The use of medium resolution satellites (AVHRR, MODIS, TET) for long time series processing and the implementation in User Driven Applications and Services. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL7, 797–804. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef] [PubMed]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Csiszar, I.; Schroeder, W.; Giglio, L.; Ellicott, E.; Vadrevu, K.P.; Justice, C.O.; Wind, B. Active fires from the Suomi NPP Visible Infrared Imaging Radiometer Suite: Product status and first evaluation results. J. Geophys. Res. Atmos. Res. 2014, 119, 803–816. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.C.; Sparks, T.; Ghosh, T. Subpixel analysis of primary and secondary infrared emitters with nighttime viirs data. Fire 2021, 4, 83. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.C.; Baugh, K.E. VIIRS nightfire: Satellite pyrometry at night. Remote Sens. 2013, 5, 4423–4449. [Google Scholar] [CrossRef]
- Oliva, P.; Schroeder, W. Assessment of VIIRS 375 m active fire detection product for direct burned area mapping. Remote Sens. Environ. 2015, 160, 144–155. [Google Scholar] [CrossRef]
- Briones-Herrera, C.I.; Vega-Nieva, D.J.; Monjarás-Vega, N.A.; Briseño-Reyes, J.; López-Serrano, P.M.; Corral-Rivas, J.J.; Alvarado-Celestino, E.; Arellano-Pérez, S.; Álvarez-González, J.G.; Ruiz-González, A.D.; et al. Near real-time automated early mapping of the perimeter of large forest fires from the aggregation of VIIRS and MODIS active fires in Mexico. Remote Sens. 2020, 12, 2061. [Google Scholar] [CrossRef]
- Alonso-canas, I.; Chuvieco, E. Global burned area mapping from ENVISAT-MERIS and MODIS active fi re data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The Collection 6 MODIS burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef] [PubMed]
- Marsha, A.L.; Larkin, N.K. Evaluating Satellite Fire Detection Products and an Ensemble Approach for Estimating Burned Area in the United States. Fire 2022, 5, 147. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Quayle, B.; Lorenz, E.; Morelli, F. Active fire detection using Landsat-8/OLI data. Remote Sens. Environ. 2016, 185, 210–220. [Google Scholar] [CrossRef]
- Kumar, S.S.; Roy, D.P. Global operational land imager Landsat-8 reflectance-based active fire detection algorithm. Int. J. Digit. Earth 2018, 11, 154–178. [Google Scholar] [CrossRef]
- Liu, T.; Mickley, L.J.; Marlier, M.E.; DeFries, R.S.; Khan, M.F.; Latif, M.T.; Karambelas, A. Diagnosing spatial biases and uncertainties in global fire emissions inventories: Indonesia as regional case study. Remote Sens. Environ. 2020, 237, 111557. [Google Scholar] [CrossRef]
- Xiang, M.; Xiao, C.; Feng, Z.; Ma, Q. Global distribution, trends and types of active fire occurrences. Sci. Total Environ. 2023, 902, 166456. [Google Scholar] [CrossRef]
- Sofan, P.; Yulianto, F.; Sakti, A.D. Characteristics of False-Positive Active Fires for Biomass Burning Monitoring in Indonesia from VIIRS Data and Local Geo-Features. ISPRS Int. J. Geo-Inf. 2022, 11, 601. [Google Scholar] [CrossRef]
- Caseiro, A.; Rücker, G.; Tiemann, J.; Leimbach, D.; Lorenz, E.; Frauenberger, O.; Kaiser, J.W. Persistent hot spot detection and characterisation using SLSTR. Remote Sens. 2018, 10, 1118. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, C.; Zhan, W.; Sun, C.; Murch, B.; Ma, L. Identifying industrial heat sources using time-series of the VIIRS Nightfire product with an object-oriented approach. Remote Sens. Environ. 2018, 204, 347–365. [Google Scholar] [CrossRef]
- Indradjad, A.; Sumnarmodo, W.; Adiningsih, E.S.; Dimyati, M.; Rokhmatuloh. Fire-hotspot information system from multi-resolution remote sensing data for early detection of forest fires. In Proceedings of the ACRS 2020—41st Asian Conference on Remote Sensing, Deqing City, China, 9–11 November 2020; pp. 538–545. [Google Scholar]
- Syaufina, L.; Sitanggang, I.S. Peatland fire detection using spatio-temporal data mining analysis in Kalimantan, Indonesia. J. Trop. For. Sci. 2018, 30, 154–162. [Google Scholar] [CrossRef]
- Di Martino, F.; Sessa, S. Extended Fuzzy C-Means hotspot detection method for large and very large event datasets. Inf. Sci. 2018, 441, 198–215. [Google Scholar] [CrossRef]
- Chart-Asa, C. Spatial-temporal patterns of MODIS active fire/hotspots in Chiang Rai, upper northern Thailand and the greater mekong subregion countries during 2003–2015. Appl. Environ. Res. 2021, 43, 121–131. [Google Scholar] [CrossRef]
- Lizundia-Loiola, J.; Otón, G.; Ramo, R.; Chuvieco, E. A spatio-temporal active-fire clustering approach for global burned area mapping at 250 m from MODIS data. Remote Sens. Environ. 2020, 236, 111493. [Google Scholar] [CrossRef]
- Humber, M.L.; Boschetti, L.; Giglio, L.; Justice, C.O. Spatial and temporal intercomparison of four global burned area products. Int. J. Digit. Earth 2019, 12, 460–484. [Google Scholar] [CrossRef] [PubMed]
- Butar-Butar, K.D.; Zamzami, E.M.; Damanik, N.; Rikki, A.; Darlina, E. Spatial Distribution and Implementation of the K-Means Clustering Method at Hotspots in North Sumatra. J. Comput. Phys. Earth Sci. 2021, 1, 1–6. [Google Scholar] [CrossRef]
- Setiawan, Y.; Prasetyo, L.B.; Pawitan, H.; Permatasari, P.A.; Suyamto, D.; Wijayanto, A.K. Identifying Areas Affected By Fires in Sumatra Based on Time Series of Remotely Sensed Fire Hotspots and Spatial Modeling. J. Pengelolaan Sumberd. Alam Lingkung. (J. Nat. Resour. Environ. Manag.) 2018, 8, 420–427. [Google Scholar] [CrossRef]
- Cizungu, N.C.; Tshibasu, E.; Lutete, E.; Mushagalusa, C.A.; Mugumaarhahama, Y.; Ganza, D.; Karume, K.; Michel, B.; Lumbuenamo, R.; Bogaert, J. Fire risk assessment, spatiotemporal clustering and hotspot analysis in the Luki biosphere reserve region, western DR Congo. Trees For. People 2021, 5, 100104. [Google Scholar] [CrossRef]
- Di Martino, F.; Sessa, S. The extended fuzzy C -means algorithm for hotspots in spatio-temporal GIS. Expert Syst. Appl. 2011, 38, 11829–11836. [Google Scholar] [CrossRef]
- Kurniawan, M.; Muhima, R.R.; Agustini, S. Comparison of Clustering K-Means, Fuzzy C-Means, and Linkage for Nasa Active Fire Dataset. Int. J. Artif. Intell. Robot. 2020, 2, 34–41. [Google Scholar] [CrossRef]
- Khairani, N.A.; Sutoyo, E. Application of K-Means Clustering Algorithm for Determination of Fire-Prone Areas Utilizing Hotspots in West Kalimantan Province. Int. J. Adv. Data Inf. Syst. 2020, 1, 9–16. [Google Scholar] [CrossRef]
- Kirana, A.P.; Sitanggang, I.S.; Syaufina, L. Poisson Clustering Process on Hotspot in Peatland Area using Kulldorff’s Scan Statistics Method. TELKOMNIKA (Telecommun. Comput. Electron. Control) 2015, 13, 1376. [Google Scholar] [CrossRef][Green Version]
- Wijaya, P.T.; Sitanggang, I.S.; Syaufina, L. Density based clustering of hotspots in peatland with road and river as physical obstacles. Indones. J. Electr. Eng. Comput. Sci. 2016, 3, 714. [Google Scholar] [CrossRef][Green Version]
- Hermawati, R.; Sitanggang, I.S. Web-Based clustering application using Shiny framework and DBSCAN algorithm for hotspots data in peatland in Sumatra. Procedia Environ. Sci. 2016, 33, 317–323. [Google Scholar] [CrossRef][Green Version]
- Usman, M.; Sukaesih, I.; Syaufina, L. Hotspot distribution analyses based on peat characteristics using density-based spatial clustering. Procedia Environ. Sci. 2015, 24, 132–140. [Google Scholar] [CrossRef][Green Version]
- Anwar, M.T.; Hadikurniawati, W.; Winarno, E.; Supriyanto, A. Wildfire Risk Map Based on DBSCAN Clustering and Cluster Density Evaluation. Adv. Sustain. Sci. Eng. Technol. 2019, 1, 0190102. [Google Scholar] [CrossRef]
- de Almeida Pereira, G.H.; Fusioka, A.M.; Nassu, B.T.; Minetto, R. Active fire detection in Landsat-8 imagery: A large-scale dataset and a deep-learning study. ISPRS J. Photogramm. Remote Sens. 2021, 178, 171–186. [Google Scholar] [CrossRef]
- Waigl, C.F.; Stuefer, M.; Prakash, A.; Ichoku, C. Detecting high and low-intensity fires in Alaska using VIIRS I-band data: An improved operational approach for high latitudes. Remote Sens. Environ. 2017, 199, 389–400. [Google Scholar] [CrossRef]
- Wooster, M.J.; Roberts, G.J.; Giglio, L.; Roy, D.; Freeborn, P.; Boschetti, L.; Justice, C.; Ichoku, C.; Schroeder, W.; Davies, D.; et al. Satellite remote sensing of active fires: History and current status, applications and future requirements. Remote Sens. Environ. 2021, 267, 112694. [Google Scholar] [CrossRef]
- Yang, X.; Hua, Z.; Zhang, L.; Fan, X.; Zhang, F.; Ye, Q.; Fu, L. Preferred vector machine for forest fire detection. Pattern Recognit. 2023, 143, 109722. [Google Scholar] [CrossRef]
- Ying, L.; Han, J.; Du, Y.; Shen, Z. Forest fire characteristics in China: Spatial patterns and determinants with thresholds. For. Ecol. Manag. 2018, 424, 345–354. [Google Scholar] [CrossRef]
- Bo, W.; Liu, J.; Fan, X.; Tjahjadi, T.; Ye, Q.; Fu, L. BASNet: Burned Area Segmentation Network for Real-time Detection of Damage Maps in Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375 m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Oudrari, H.; McIntire, J.; Xiong, X.; Butler, J.; Ji, Q.; Schwarting, T.; Lee, S.; Efremova, B. JPSS-1 VIIRS radiometric characterization and calibration based on pre-launch testing. Remote Sens. 2016, 8, 41. [Google Scholar] [CrossRef]
- Huang, A.; Gumley, L.; Strabala, K.; Mindock, S.; Garcia, R.; Martin, G.; Cureton, G.; Davies, J.; Bearson, N.; Braum, J.; et al. Community Satellite Processing Package from Direct Broadcast: Providing real-time Satellite Data to every corner of the world. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 5532–5535. [Google Scholar] [CrossRef]
- Gustiandi, B.; Indradjad, A. Visible Infrared Imager Radiometer Suite (VIIRS) Active Fires Application Related Products (AFARP) Generation Using Community Satellite Processing Package (CSPP) Software. In Proceedings of the 34th Asian Conference on Remote Sensing; Indonesian Remote Sensing Society and Asian Association on Remote Sensing, Bali, Indonesia, 20–24 October 2013; pp. SC02-893–SC02-900. [Google Scholar]
- Indradjad, A.; Sunarmodo, W.; Salyasari, N.; Pratiknyo, B. Development of National Forest/Land Fire Monitoring System Using Remote Sensing Satellite Data (Terra/Aqua Modis and SNPP) by Automation and Nearly Real-time. IOP Conf. Ser. Earth Environ. Sci. 2019, 280, 012032. [Google Scholar] [CrossRef]
- Ritung, S.; Wahyunto, N.K.; Sukarman, H.; Suparto, T.C. Peta Lahan Gambut Indonesia Skala 1:250,000 (Indonesia Peat Soil Map 1:250,000); IAARD Press, Ministry of Agriculture, Agency for Agricultural Research and Development: Bogor, Indonesia, 2011. [Google Scholar]
- Schroeder, W.; Prins, E.; Giglio, L.; Csiszar, I.; Schmidt, C.; Morisette, J.; Morton, D. Validation of GOES and MODIS active fire detection products using ASTER and ETM+ data. Remote Sens. Environ. 2008, 112, 2711–2726. [Google Scholar] [CrossRef]
- Sofan, P.; Bruce, D.; Schroeder, W.; Jones, E.; Marsden, J. Assessment of VIIRS 375 m active fire using tropical peatland combustion algorithm applied to Landsat-8 over Indonesia’s peatlands. Int. J. Digit. Earth 2020, 13, 1695–1716. [Google Scholar] [CrossRef]
- Vetrita, Y.; Haryani, N.S. Validasi Hotspot MODIS INDOFIRE di Province Riau (Validation of MODIS INDOFIRE in Riau Province). J. Ilm. Geomatika 2012, 18, 17–28. [Google Scholar]
- Çolak, E.; Sunar, F. The importance of ground-truth and crowdsourcing data for the statistical and spatial analyses of the NASA FIRMS active fires in the Mediterranean Turkish forests. Remote Sens. Appl. Soc. Environ. 2020, 19, 100327. [Google Scholar] [CrossRef]
- Sofan, P.; Bruce, D.; Jones, E.; Marsden, J. Detection and validation of tropical Peatland flaming and smouldering using Landsat-8 SWIR and TIRS bands. Remote Sens. 2019, 11, 465. [Google Scholar] [CrossRef]
- Vetrita, Y.; Cochrane, M.A. Fire frequency and related land-use and land-cover changes in Indonesia’s Peatlands. Remote Sens. 2020, 12, 5. [Google Scholar] [CrossRef]
- Jiao, Q.; Fan, M.; Tao, J.; Wang, W.; Liu, D.; Wang, P. Forest Fire Patterns and Lightning-Caused Forest Fire Detection in Heilongjiang Province of China Using Satellite Data. Fire 2023, 6, 166. [Google Scholar] [CrossRef]
- Gaveau, D.L.A.; Descals, A.; Salim, M.A.; Sheil, D.; Sloan, S. Refined burned-area mapping protocol using Sentinel-2 data increases estimate of 2019 Indonesian burning. Earth Syst. Sci. Data 2021, 13, 5353–5368. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimation of Burn Area (ha) | Field Data (%) | Burn Area Map (%) | Number of Points in Peatlands Only | Number of Points in Non-Peatlands Only |
|---|---|---|---|---|
| ≤3.5 | 80.06 | 25.16 | 318 | 1188 |
| >3.5 | 19.94 | 74.84 | 169 | 206 |
| >7.0 | 9.14 | 57.93 | 95 | 77 |
| >14.0 | 4.04 | 41.65 | 47 | 29 |
| Id | Date | Time | Latitude | Longitude | CL | Satellite | RK | Subdistrict | District | Province | Method |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 3 March 2020 | 00:52:43 | −0.06421 | 103.1234 | 8 | noaa20 | 1280 | Gaunganakserka | Indragiri Hilir | Riau | Cluster |
| 2 | 3 March 2020 | 00:52:43 | −0.25836 | 103.0436 | 8 | noaa20 | 1125 | Batang Tuaka | Indragiri Hilir | Riau | Cluster |
| 3 | 3 March 2020 | 00:52:43 | −0.39327 | 102.9552 | 8 | noaa20 | 1500 | Tempuling | Indragiri Hilir | Riau | Cluster |
| 4 | 3 March 2020 | 13:30:53 | 1.926316 | 101.4626 | 8 | noaa20 | 1125 | Rupat | Bengkalis | Riau | Cluster |
| 5 | 3 March 2020 | 00:52:43 | 1.927811 | 101.4431 | 8 | noaa20 | 2968 | Rupat | Bengkalis | Riau | Cluster |
| 6 | 3 March 2020 | 01:45:21 | 1.920925 | 101.4551 | 8 | snpp | 2769 | Rupat | Bengkalis | Riau | Cluster |
| 7 | 3 March 2020 | 01:45:21 | 1.966086 | 101.556 | 8 | snpp | 1668 | Rupat Utara | Bengkalis | Riau | Cluster |
| 8 | 3 March 2020 | 01:45:21 | 1.058746 | 102.953 | 8 | snpp | 1810 | Tebing Tinggi | Kepulauan Meranti | Riau | Cluster |
| 9 | 3 March 2020 | 01:45:21 | 1.090938 | 102.9439 | 8 | snpp | 1742 | Tebing Tinggi | Kepulauan Meranti | Riau | Cluster |
| 10 | 3 March 2020 | 01:45:21 | 0.995505 | 102.2071 | 8 | snpp | 2384 | Sungai Apit | Siak | Riau | Cluster |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Indradjad, A.; Dimyati, M.; Vetrita, Y.; Adiningsih, E.S.; Rokhmatuloh, R. Enhancing Fire Monitoring Method over Peatlands and Non-Peatlands in Indonesia Using Visible Infrared Imaging Radiometer Suite Data. Fire 2024, 7, 9. https://doi.org/10.3390/fire7010009
Indradjad A, Dimyati M, Vetrita Y, Adiningsih ES, Rokhmatuloh R. Enhancing Fire Monitoring Method over Peatlands and Non-Peatlands in Indonesia Using Visible Infrared Imaging Radiometer Suite Data. Fire. 2024; 7(1):9. https://doi.org/10.3390/fire7010009
Chicago/Turabian StyleIndradjad, Andy, Muhammad Dimyati, Yenni Vetrita, Erna Sri Adiningsih, and Rokhmatuloh Rokhmatuloh. 2024. "Enhancing Fire Monitoring Method over Peatlands and Non-Peatlands in Indonesia Using Visible Infrared Imaging Radiometer Suite Data" Fire 7, no. 1: 9. https://doi.org/10.3390/fire7010009
APA StyleIndradjad, A., Dimyati, M., Vetrita, Y., Adiningsih, E. S., & Rokhmatuloh, R. (2024). Enhancing Fire Monitoring Method over Peatlands and Non-Peatlands in Indonesia Using Visible Infrared Imaging Radiometer Suite Data. Fire, 7(1), 9. https://doi.org/10.3390/fire7010009