

AI-Driven Safety and Security for UAVs: From Machine Learning to Large Language Models
 , , and
, , and
Abstract
1. Introduction
1.1. Motivation
1.2. State of the Art
1.3. Comparison of Related Surveys
- We present a comprehensive review of traditional AI methods in the context of UAV safety and security, synthesizing their pivotal role in mitigating operational threats;
- We critically evaluate the limitations of conventional AI models, focus on their shortcomings in dynamic, real-time UAV environments, and propose essential areas for advancement to achieve robust and reliable safety and security frameworks;
- We provide an in-depth analysis of the emerging integration of LLMs into UAV safety and security domains, demonstrating their transformative potential through multimodal data fusion, real-time decision-making, and adaptive threat detection, offering insights that may be useful for future research;
- We outline innovative future research directions, emphasizing novel solutions such as multimodal embodied intelligence systems and satellite networks, to address LLM deployment challenges, paving the way for secure and efficient operations.
2. Background
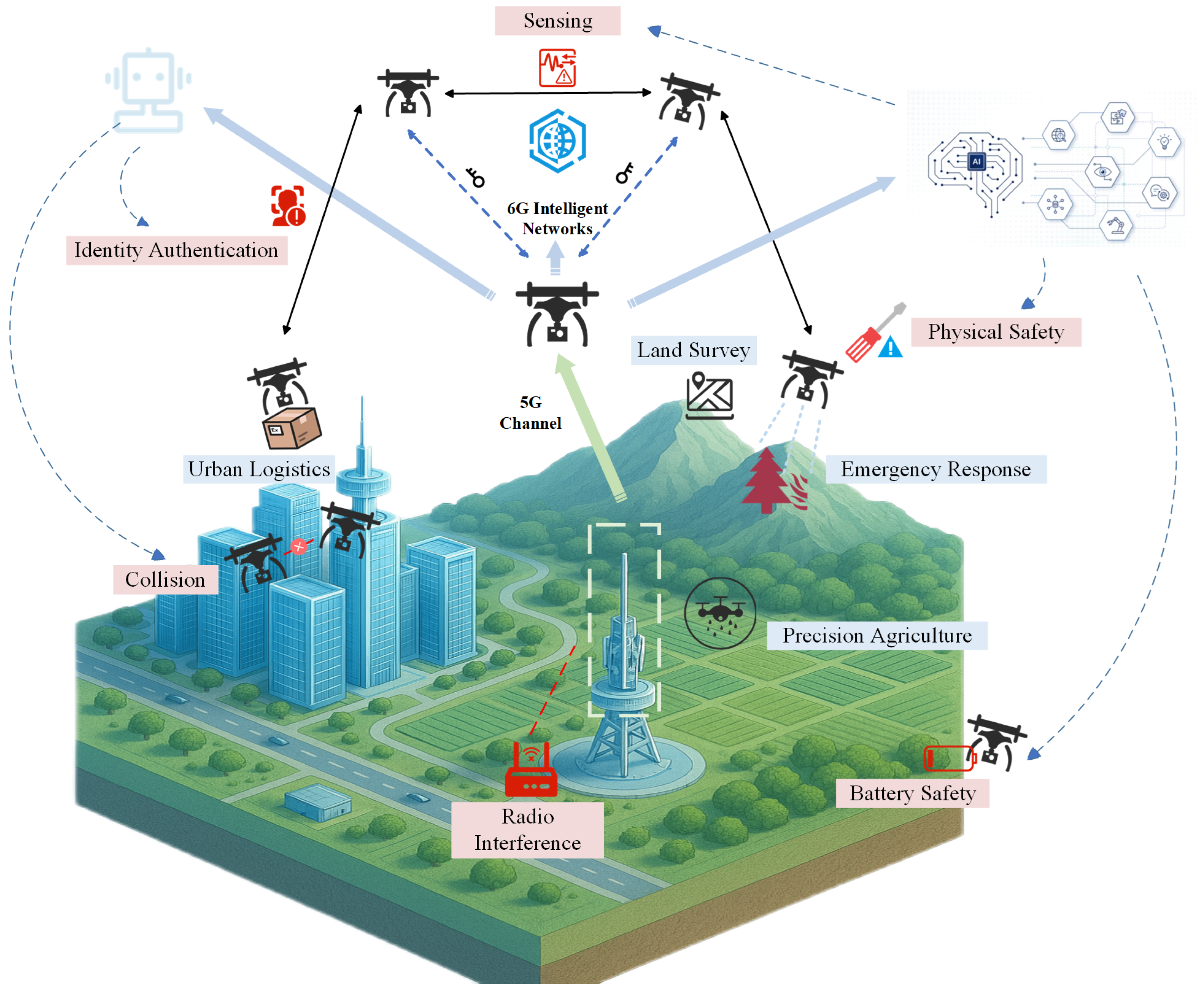
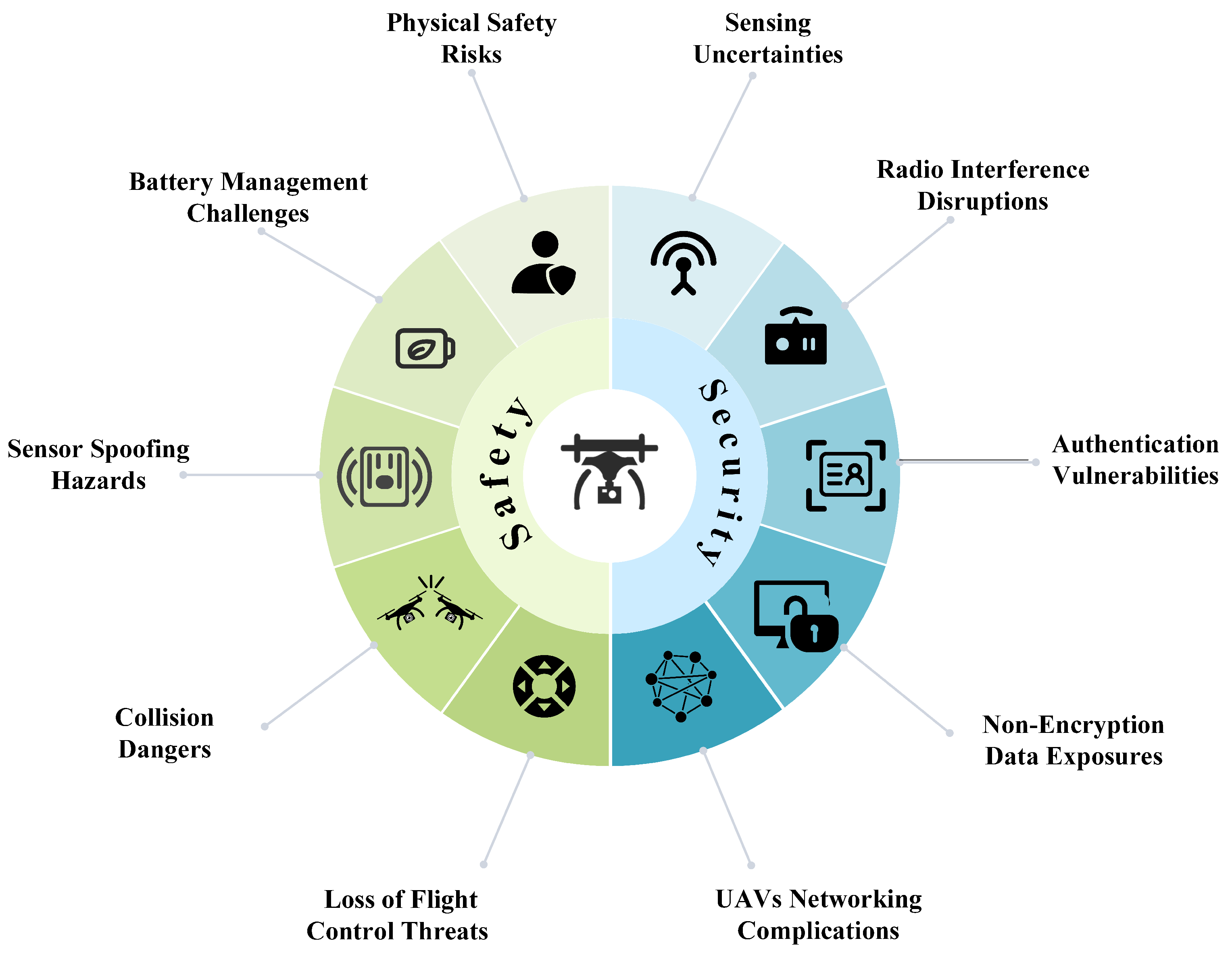
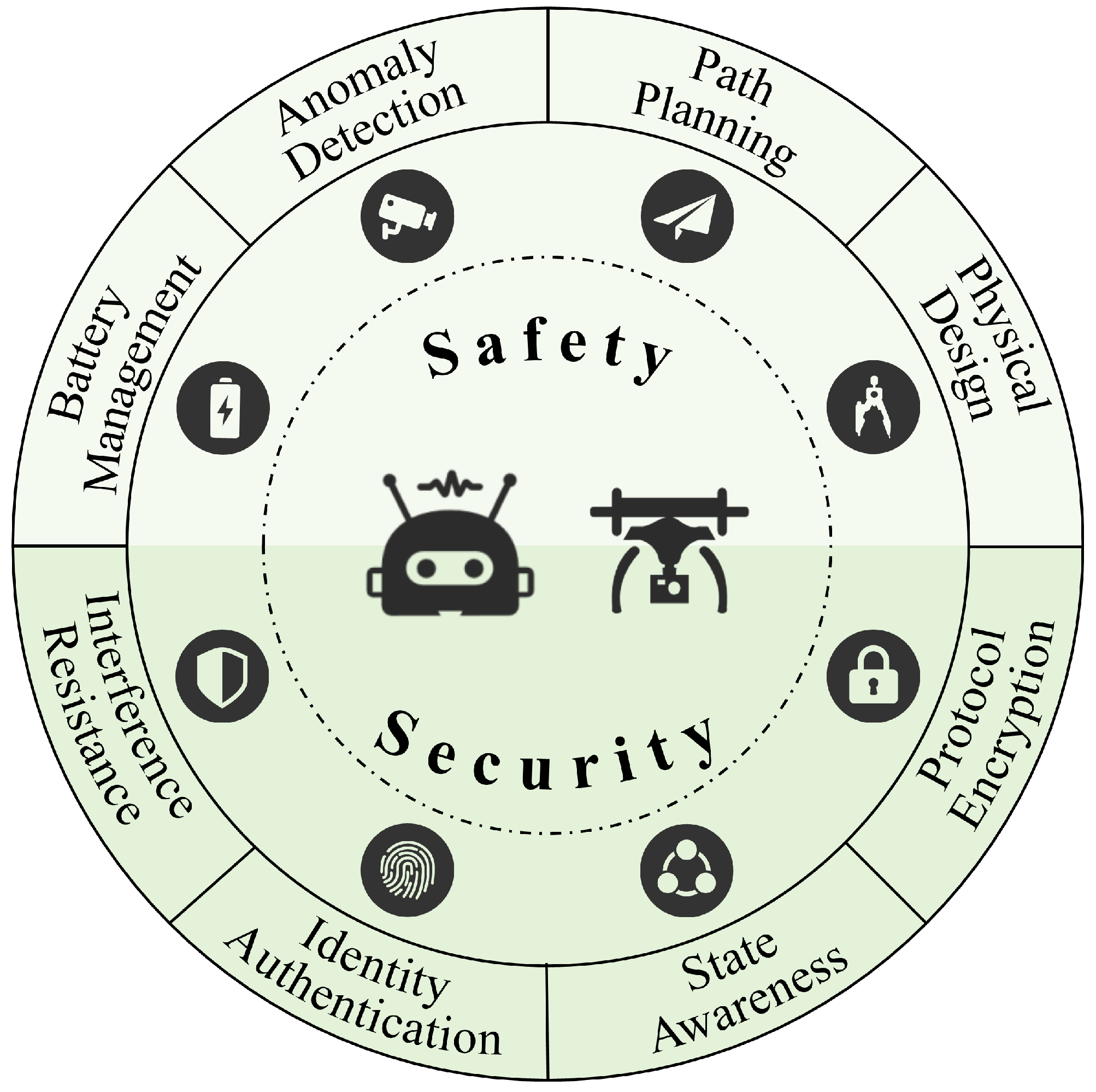
2.1. UAV Safety and Security Threats
2.1.1. UAV Safety Threats
- Physical Safety Risks
- Battery management challenges
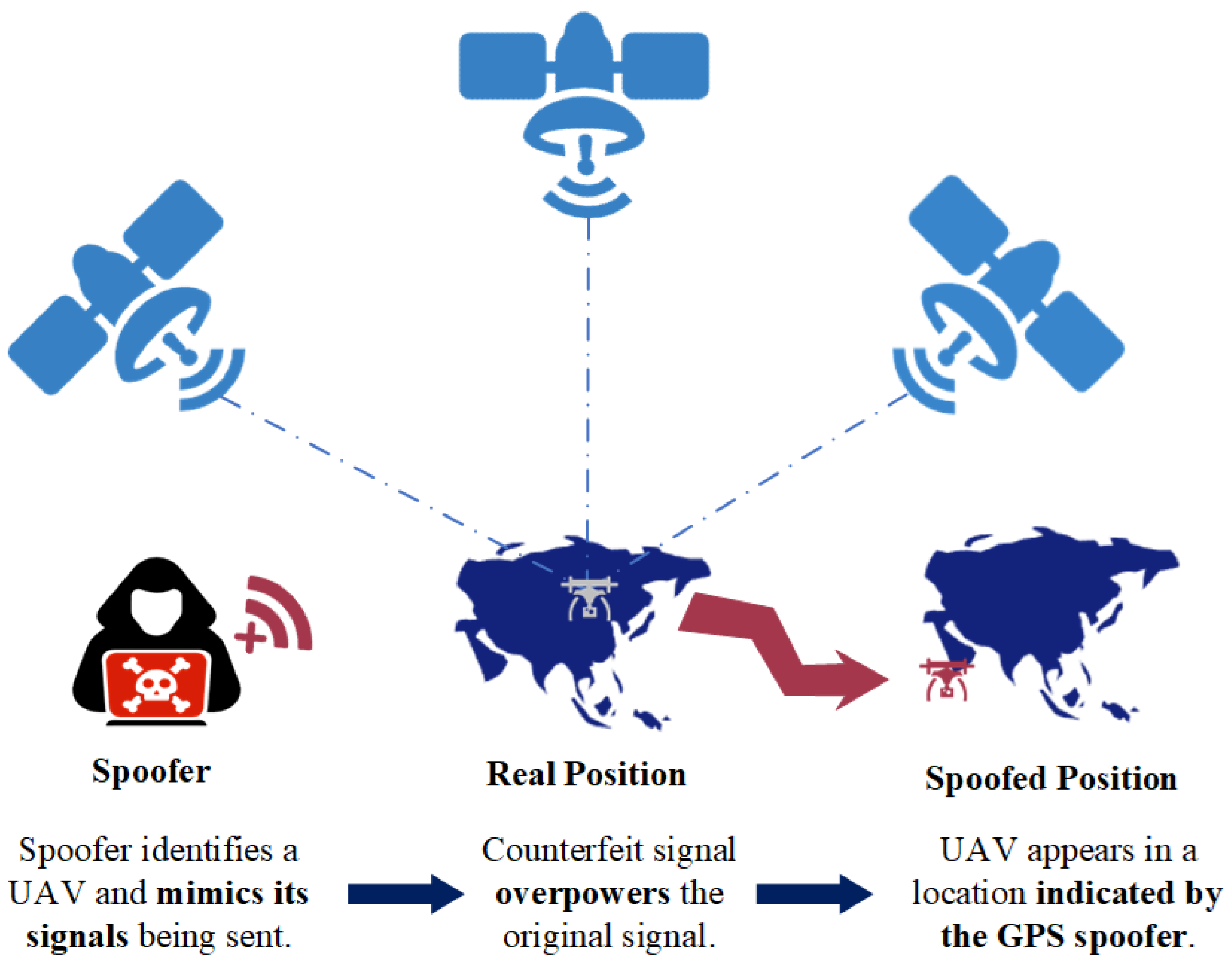
- Sensor Spoofing Hazards
- Collision Dangers
- Loss of Flight Control Threats
2.1.2. UAV Security Threats
- Sensing Uncertainties
- Radio Interference Disruptions
- Authentication Vulnerabilities
- Nonencrypted Data Exposure
- UAV Networking Complications
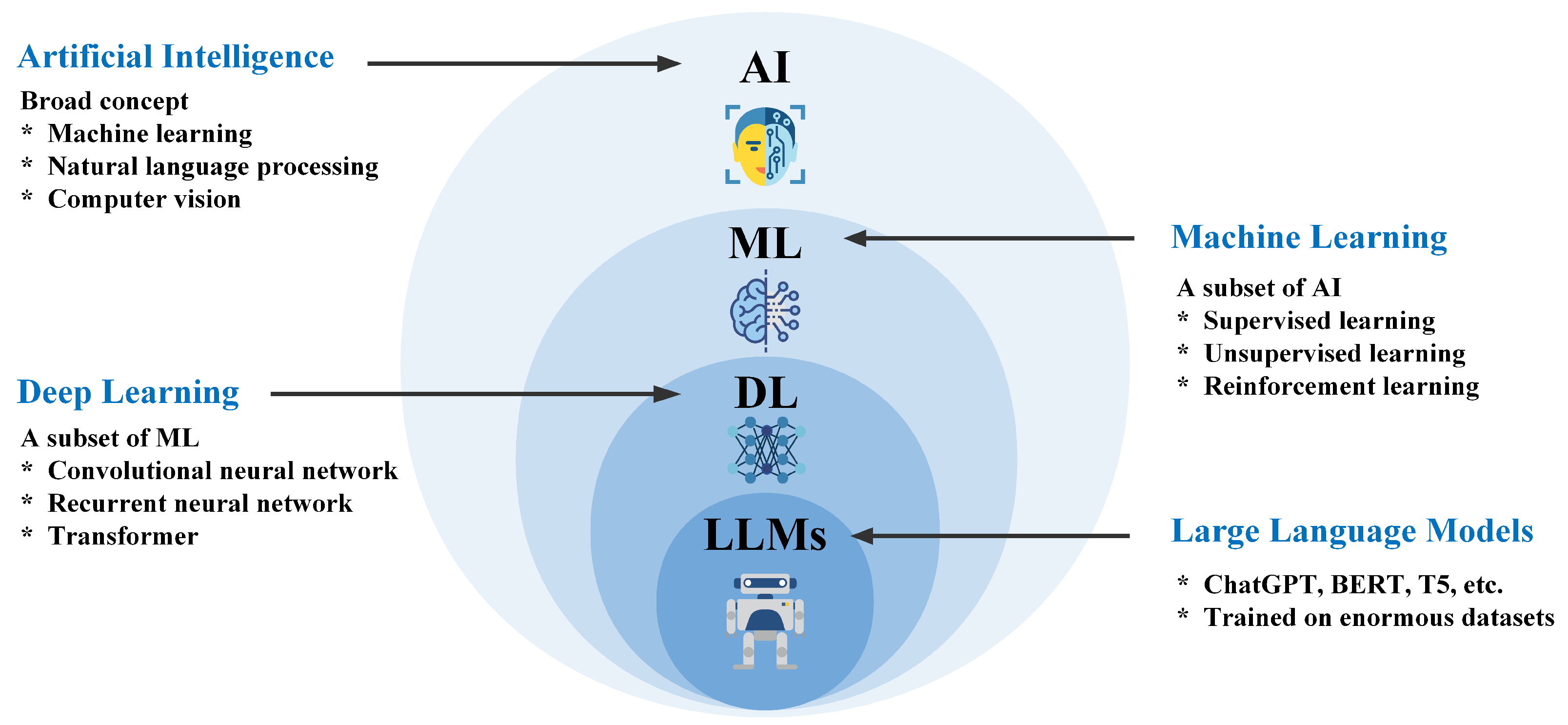
2.2. Overview of Artificial Intelligence Technologies
2.2.1. Artificial Intelligence
2.2.2. Machine Learning
2.2.3. Deep Learning
2.2.4. Large Language Models
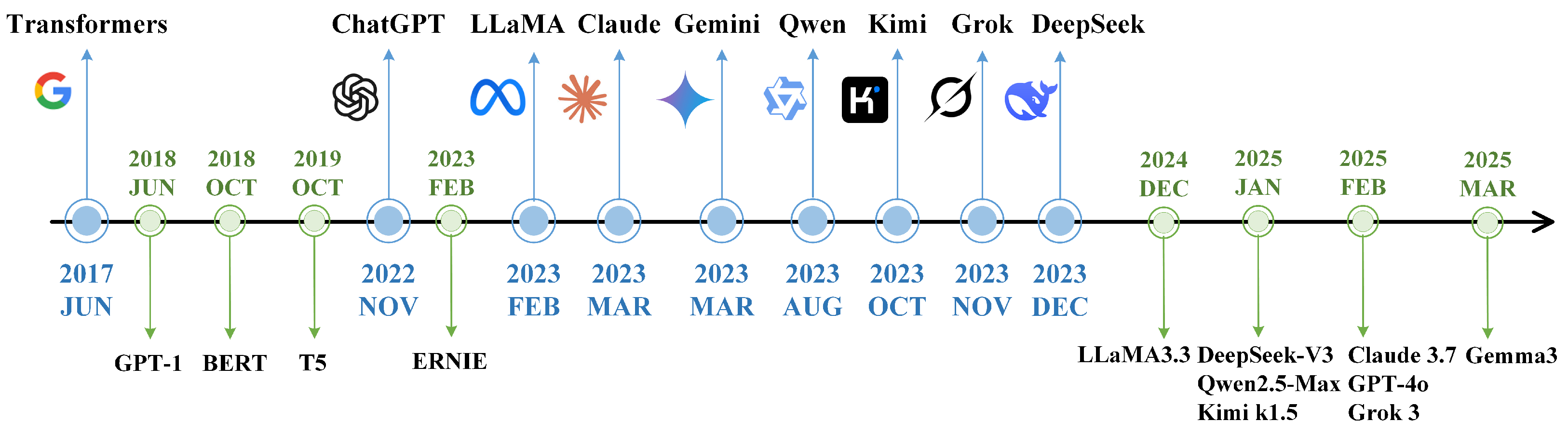
2.3. Typical LLMs and Potential Applications
2.3.1. Claude
2.3.2. GPT
2.3.3. Grok
2.3.4. Gemini
2.3.5. LLaMA
2.3.6. DeepSeek
2.3.7. Qwen
2.3.8. Kimi
2.4. Lessons Learned
3. AI for UAV Safety
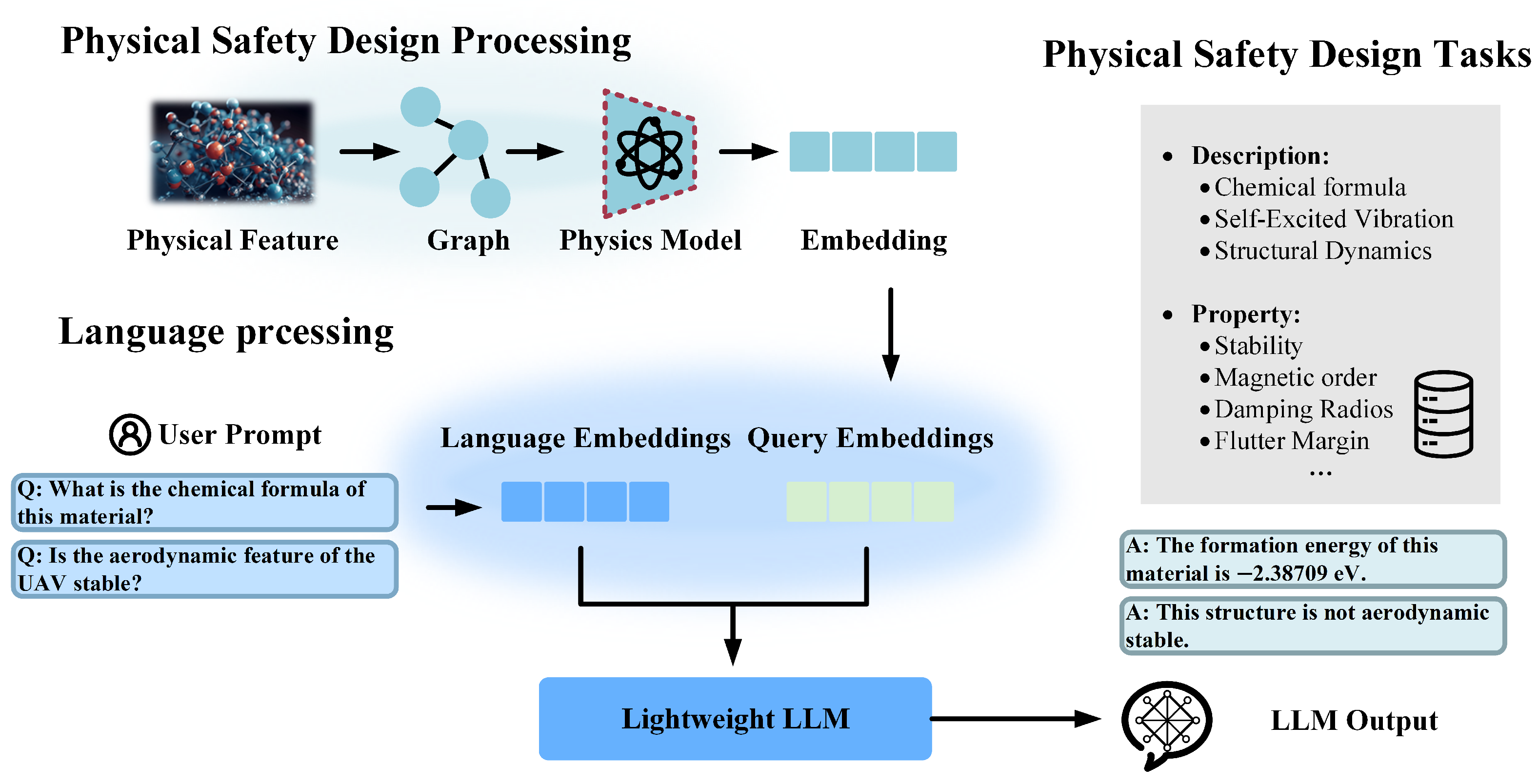
3.1. UAV Physical Safety Design
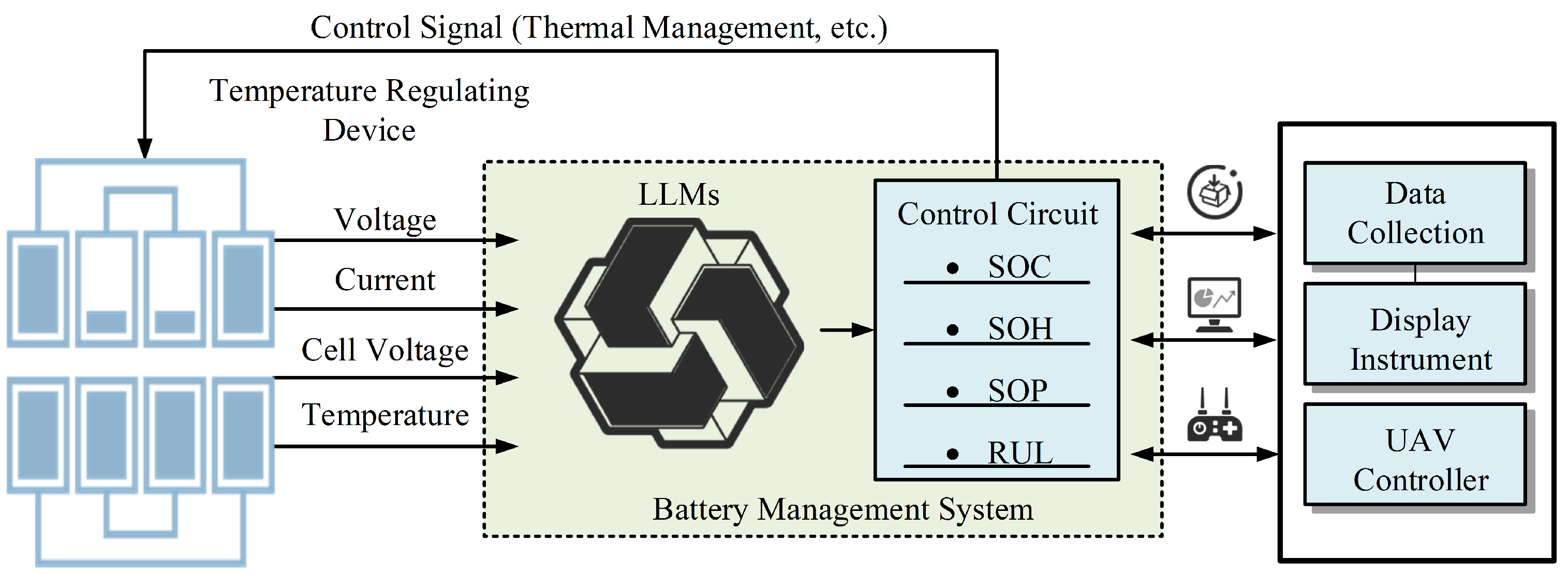
3.2. UAV Battery Safety Management
3.3. UAV Sensor Spoofing Detection
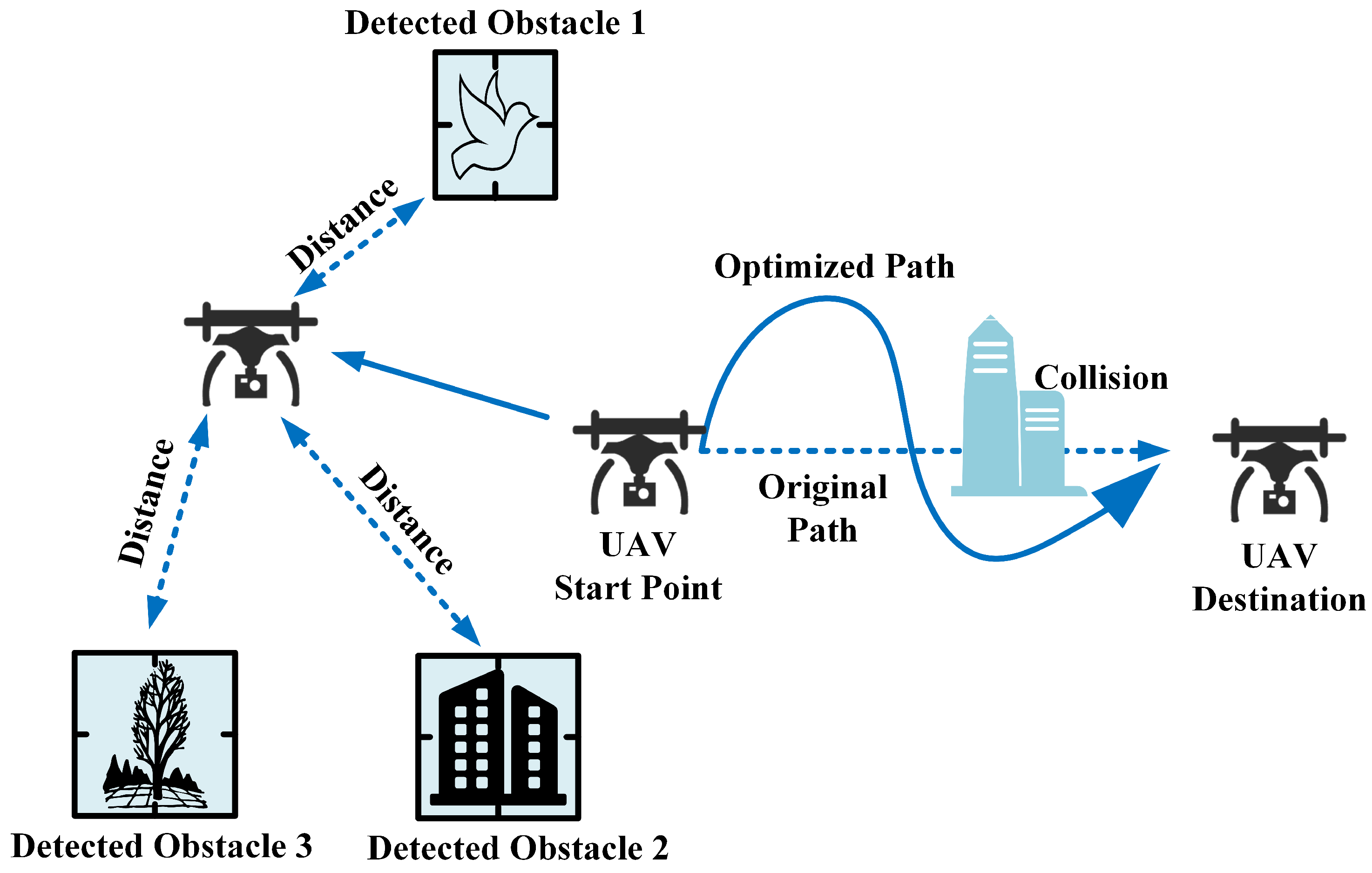
3.4. UAV Collision Avoidance and Path Planning
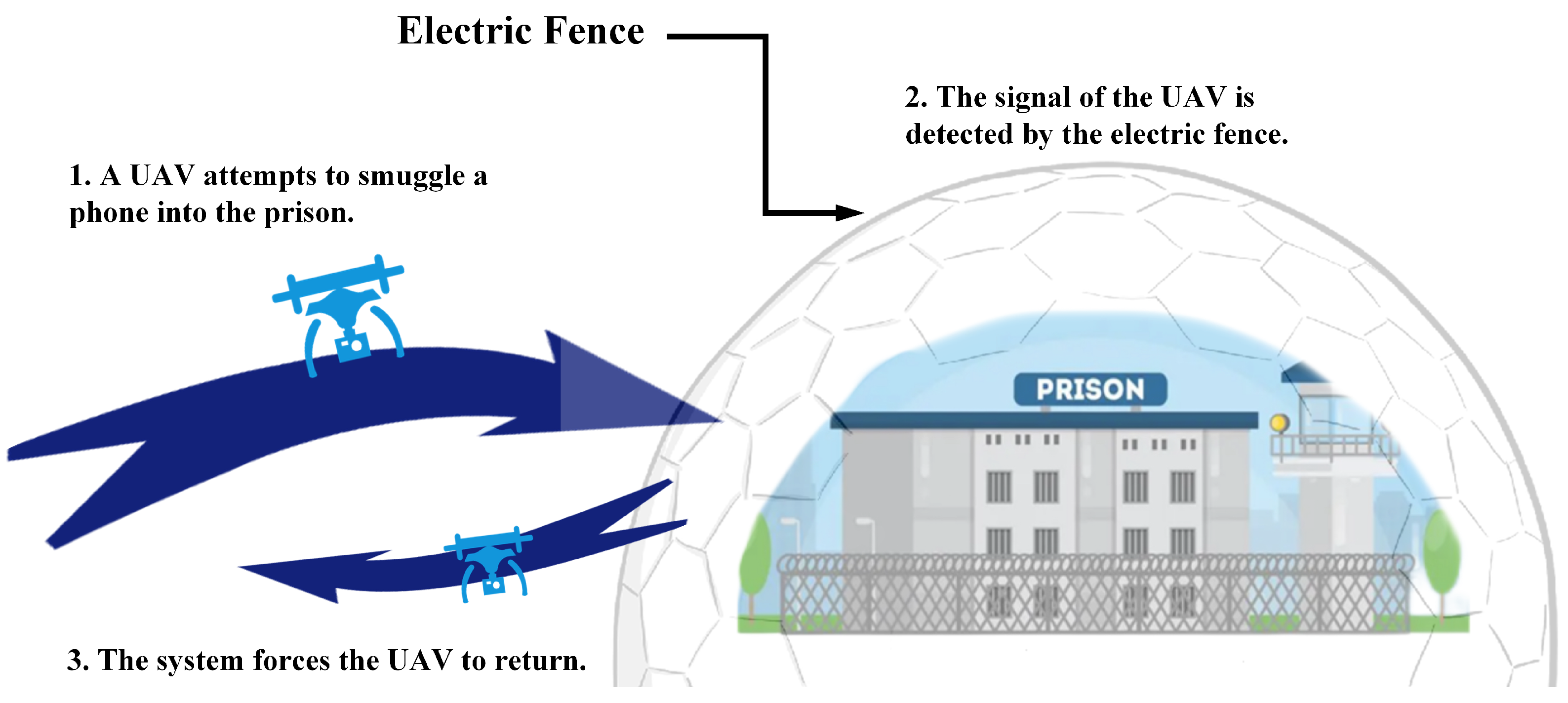
3.5. UAV Flight Control
3.6. Lessons Learned
4. AI for UAV Security
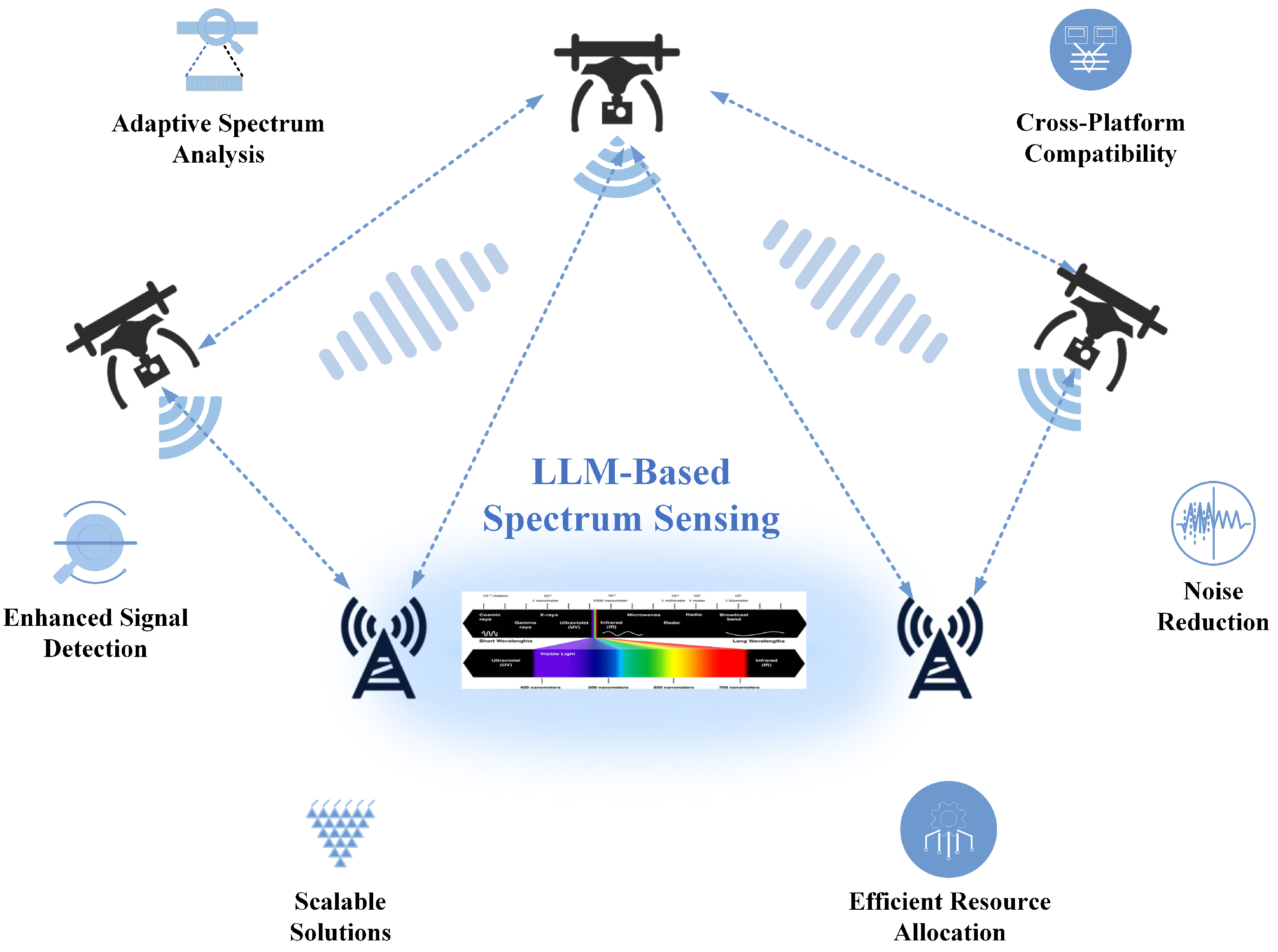
4.1. UAV Sensing Security Technology
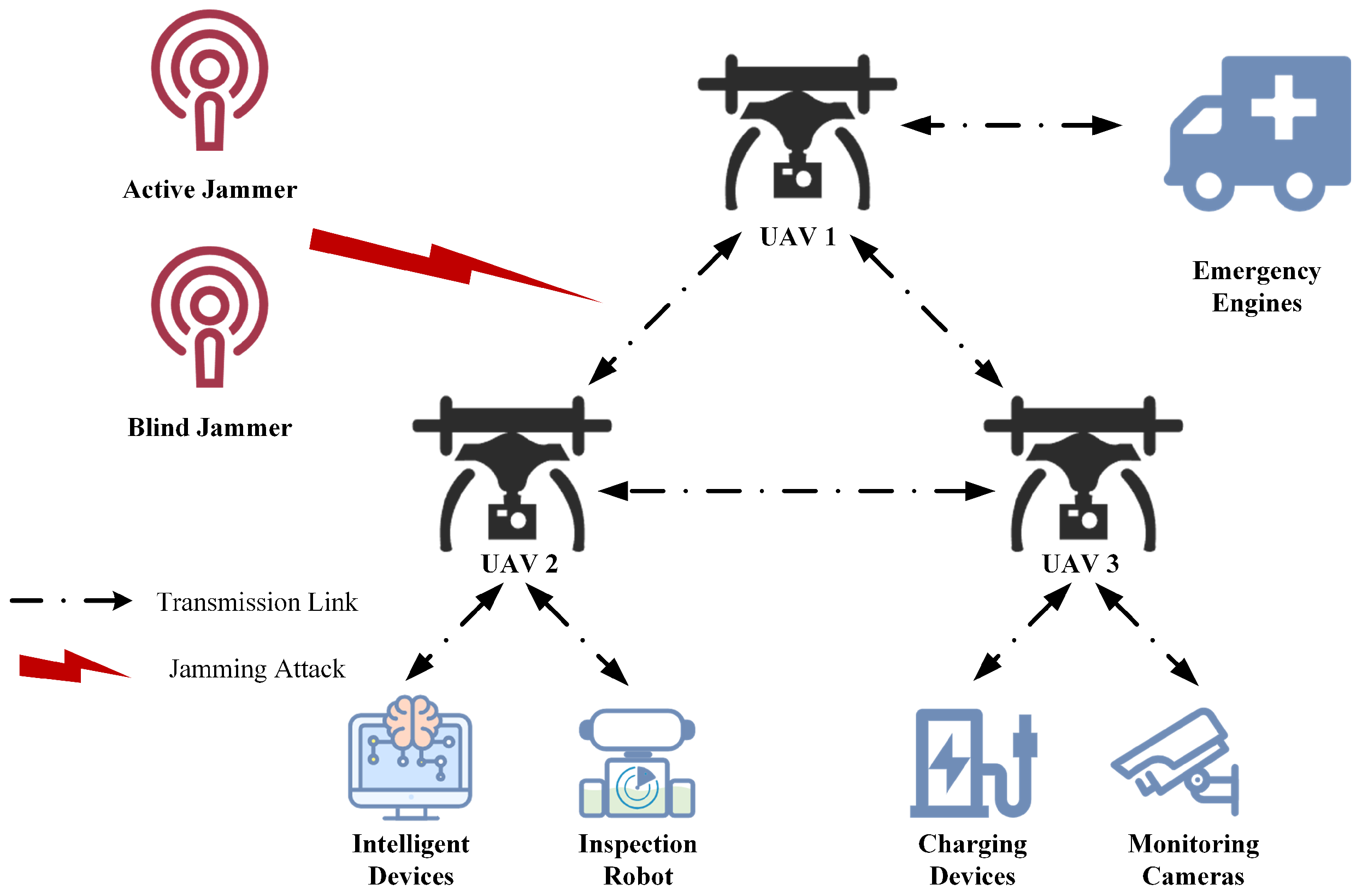
4.2. UAV Radio Anti-Interference
4.3. UAV Identity Authentication Security
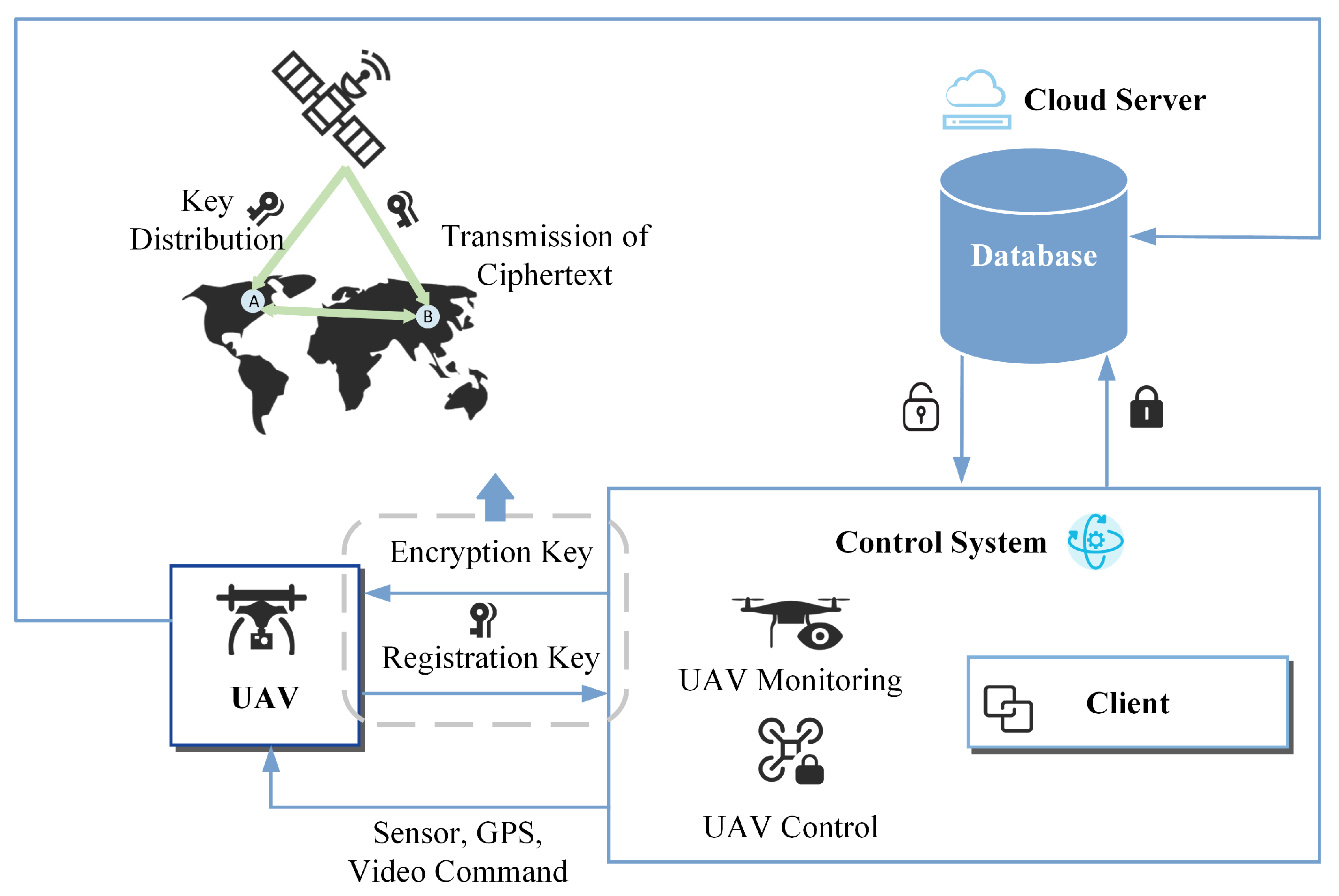
4.4. UAV Cryptography
4.5. UAV Self-Organizing Network Communications Security
4.6. Lessons Learned
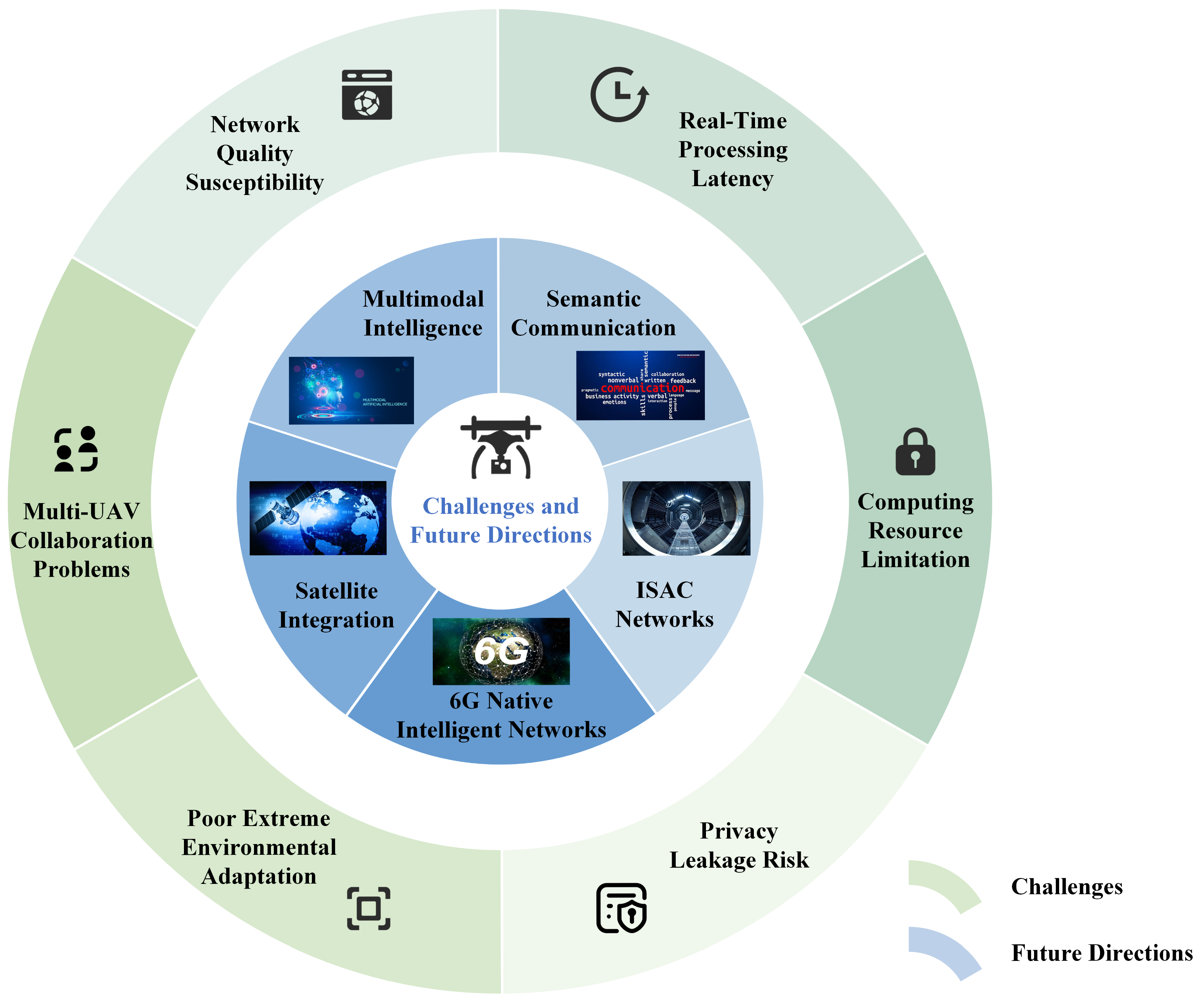
5. Challenges and Future Directions
5.1. Challenges
5.1.1. Real-Time Processing Latency
5.1.2. Computing Resource Limitations
5.1.3. Privacy Leakage Risk
5.1.4. Poor Extreme Environmental Adaptation
5.1.5. Multi-UAV Collaboration Problems
5.1.6. Network Quality Susceptibility
5.2. Future Directions
5.2.1. Multimodal Embodied Intelligence System Integration
5.2.2. Satellite Network Communication Enhancement
5.2.3. 6G Native Intelligent Communication Network
5.2.4. ISAC Empowers Digital Low-Altitude Networks
5.2.5. Low-Altitude Semantic Communication
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AES | Advanced encryption standard |
| AI | Artificial intelligence |
| AKA | Authentication and key agreement |
| ANSI | American National Standards Institute |
| AODV | Ad-hoc on-demand distance vector |
| API | Application programming interface |
| BERT | Bidirectional encoder representations from Transformers |
| BMS | Battery management system |
| CNN | Convolutional neural network |
| DL | Deep learning |
| DM | Diffusion model |
| DRL | Deep reinforcement learning |
| DoS | Denial-of-service |
| EAI | Embedded artificial intelligence |
| EASA | European Aviation Safety Agency |
| EU | European Union |
| FAIR | Findable, accessible, interoperable, and reusable |
| FANET | Flying ad-hoc network |
| GAI | Generative artificial intelligence |
| GAN | Generative adversarial network |
| GPS | Global positioning system |
| GPSR | Greedy perimeter stateless routing |
| GPT | Generative pretrained transformer |
| GPU | Graphics processing unit |
| IDS | Intrusion detection system |
| IMU | Inertial measurement unit |
| ISAC | Integrated sensing and communication |
| IoT | Internet of things |
| IoUAV | Internet of unmanned aerial vehicle |
| LLM | Large language model |
| LSTM | Long short-term memory |
| MAC | Media access control |
| ML | Machine learning |
| MoE | Mixture of experts |
| OLSR | Optimized link state routing |
| PUF | Physical unclonable function |
| RL | Reinforcement learning |
| RNN | Recurrent neural network |
| RUL | Remaining useful life |
| SME | Small and medium-sized enterprise |
| SOC | State of charge |
| SOH | State of health |
| SON | Selforganizing network |
| UASSC | Unmanned Aircraft Systems Standardization Collaborative |
| UAV | Unmanned aerial vehicle |
| VAE | Variational autoencoder |
| WMN | Wireless multihop network |
References
- Betti Sorbelli, F. UAV-based delivery systems: A systematic review, current trends, and research challenges. Acm J. Auton. Transp. Syst. 2024, 1, 1–40. [Google Scholar] [CrossRef]
- Toscano, F.; Fiorentino, C.; Capece, N.; Erra, U.; Travascia, D.; Scopa, A.; Drosos, M.; D’Antonio, P. Unmanned aerial vehicle for precision agriculture: A review. IEEE Access 2024, 12, 69188–69205. [Google Scholar] [CrossRef]
- Boroujeni, S.P.H.; Razi, A.; Khoshdel, S.; Afghah, F.; Coen, J.L.; O’Neill, L.; Fule, P.; Watts, A.; Kokolakis, N.M.T.; Vamvoudakis, K.G. A comprehensive survey of research towards AI-enabled unmanned aerial systems in pre-, active-, and post-wildfire management. Inf. Fusion 2024, 108, 102369. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, C.; Cheng, J.; Sun, F. Research on the strategy of UAV swarm collaborative hunting of black flights. In Proceedings of the 2024 43rd Chinese Control Conference (CCC), Kunming, China, 28–31 July 2024; pp. 3006–3012. [Google Scholar]
- Alqudsi, Y.; Makaraci, M. UAV swarms: Research, challenges, and future directions. J. Eng. Appl. Sci. 2025, 72, 12. [Google Scholar] [CrossRef]
- Pal, O.K.; Shovon, M.; Mridha, M.; Shin, J. In-depth review of AI-enabled unmanned aerial vehicles: Trends, vision, and challenges. Discov. Artif. Intell. 2024, 4, 1–24. [Google Scholar] [CrossRef]
- Bakambekova, A.; Kouzayha, N.; Al-Naffouri, T. On the interplay of artificial intelligence and space-air-ground integrated networks: A survey. IEEE Open J. Commun. Soc. 2024, 5, 4613–4673. [Google Scholar] [CrossRef]
- Fang, Z.; Savkin, A.V. Strategies for optimized UAV surveillance in various tasks and scenarios: A review. Drones 2024, 8, 193. [Google Scholar] [CrossRef]
- Sun, G.; Xie, W.; Niyato, D.; Du, H.; Kang, J.; Wu, J.; Sun, S.; Zhang, P. Generative AI for advanced UAV networking. IEEE Netw. 2024, in press. [Google Scholar] [CrossRef]
- Javaid, S.; Saeed, N.; He, B. Large language models for UAVs: Current state and pathways to the future. IEEE Open J. Veh. Technol. 2024, 5, 1166–1192. [Google Scholar] [CrossRef]
- Lykov, A.; Karaf, S.; Martynov, M.; Serpiva, V.; Fedoseev, A.; Konenkov, M.; Tsetserukou, D. FlockGPT: Guiding UAV flocking with linguistic orchestration. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality Workshops, Bellevue, WA, USA, 21–25 October 2024; pp. 485–488. [Google Scholar]
- Yao, F.; Yue, Y.; Liu, Y.; Sun, X.; Fu, K. AeroVerse: UAV-Agent benchmark suite for simulating, pre-training, finetuning, and evaluating aerospace embodied world models. arXiv 2024, arXiv:2408.15511. [Google Scholar]
- Aikins, G.; Dao, M.P.; Moukpe, K.J.; Eskridge, T.C.; Nguyen, K.D. LEVIOSA: Natural language-based uncrewed aerial vehicle trajectory generation. Electronics 2024, 13, 4508. [Google Scholar] [CrossRef]
- Doschl, B.; Kiam, J.J. Say-REAPEx: An LLM-Modulo UAV online planning framework for search and rescue. OpenReview 2024. submitted. [Google Scholar]
- Zhao, A.; Huang, D.; Xu, Q.; Lin, M.; Liu, Y.J.; Huang, G. ExpeL: LLM agents are experiential learners. Proc. AAAI Conf. Artif. Intell. 2024, 38, 19632–19642. [Google Scholar] [CrossRef]
- Eigner, E.; Händler, T. Determinants of LLM-assisted decision-making. arXiv 2024, arXiv:2402.17385. [Google Scholar]
- Tian, Y.; Lin, F.; Li, Y.; Zhang, T.; Zhang, Q.; Fu, X.; Huang, J.; Dai, X.; Wang, Y.; Tian, C.; et al. UAVs meet LLMs: Overviews and perspectives toward agentic low-altitude mobility. arXiv 2025, arXiv:2501.02341. [Google Scholar] [CrossRef]
- Akram, R.N.; Markantonakis, K.; Mayes, K.; Habachi, O.; Sauveron, D.; Steyven, A.; Chaumette, S. Security, privacy and safety evaluation of dynamic and static fleets of drones. In Proceedings of the the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–12. [Google Scholar]
- He, D.; Qiao, Y.; Chan, S.; Guizani, N. Flight security and safety of drones in airborne fog computing systems. IEEE Commun. Mag. 2018, 56, 66–71. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, X.; Yang, L.; Tian, L.; Chen, Y.; Zhang, Y.; Li, P. Research on a new improved UAV anti-jamming and optimization model. In Proceedings of the Third International Conference on Computer Science and Communication Technology (ICCSCT 2022), Beijing, China, 30–31 July 2022; pp. 754–759. [Google Scholar]
- Derhab, A.; Cheikhrouhou, O.; Allouch, A.; Koubaa, A.; Qureshi, B.; Ferrag, M.A.; Maglaras, L.; Khan, F.A. Internet of drones security: Taxonomies, open issues, and future directions. Veh. Commun. 2023, 39, 100552. [Google Scholar] [CrossRef]
- Wei, X.; Ma, J.; Sun, C. A survey on security of unmanned aerial vehicle systems: Attacks and countermeasures. IEEE Internet Things J. 2024, 11, 34826–34847. [Google Scholar] [CrossRef]
- Gupta, S.; Sharma, N. SCFS-securing flying ad hoc network using cluster-based trusted fuzzy scheme. Complex Intell. Syst. 2024, 10, 3743–3762. [Google Scholar] [CrossRef]
- Luo, X.; Wang, Q.; Gong, H.; Tang, C. UAV path planning based on the average TD3 Algorithm with prioritized experience replay. IEEE Access 2024, 12, 38017–38029. [Google Scholar] [CrossRef]
- Du, D.; Chang, M.; Bai, J.; Xia, L. Autonomous recovery system of aerial child-mother unmanned systems based on visual positioning. In Proceedings of the 2022 International Conference on Autonomous Unmanned Systems (ICAUS 2022), Xi’an, China, 23–25 September 2023; Volume 1010, pp. 1787–1797. [Google Scholar]
- Tang, Y.C.; Chen, P.Y.; Ho, T.Y. Defining and evaluating physical safety for large language models. arXiv 2024, arXiv:2411.02317. [Google Scholar]
- Xia, T.; Wang, M.; He, J.; Lin, S.; Shi, Y.; Guo, L. Research on Identity authentication scheme for UAV communication network. Electronics 2023, 12, 2917. [Google Scholar] [CrossRef]
- Gnanaraj, A.A.M.; Abbasali, F.; Kumar, A.S.; Subramanian, S.B.; Chinnathambi, M. Hyperelliptic curve based authentication for the internet of drones. Int. J. Reconfig. Embed. Syst. (IJRES) 2024, 13, 133–142. [Google Scholar] [CrossRef]
- Motlagh, F.N.; Hajizadeh, M.; Majd, M.; Najafi, P.; Cheng, F.; Meinel, C. Large language models in cybersecurity: State-of-the-art. arXiv 2024, arXiv:2402.00891. [Google Scholar]
- EU. Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on Unmanned Aircraft Systems and on Third-Country Operators of Unmanned Aircraft Systems. Available online: https://eur-lex.europa.eu/eli/reg_del/2019/945/oj/eng (accessed on 13 May 2025).
- EU. Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft. Available online: https://eur-lex.europa.eu/eli/reg_impl/2019/947/oj/eng (accessed on 13 May 2025).
- EU. Communication from the Commission to the Council and the European Parliament on Countering Potential Threats Posed by Drones. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:52023DC0659 (accessed on 13 May 2025).
- ANSI. Standardization Roadmap 2.0 for Unmanned Aircraft Systems. Available online: https://share.ansi.org/Shared%20Documents/Standards%20Activities/UASSC/ANSI_UASSC_Roadmap_V2_June_2020.pdf (accessed on 13 May 2025).
- 3GPP. Service Requirements for the 5G System V19.2.0. Available online: https://datatracker.ietf.org/meeting/119/materials/slides-119-dtn-3gpp-delay-tolerant-use-cases-00 (accessed on 13 May 2025).
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Ceviz, O.; Sen, S.; Sadioglu, P. A survey of security in UAVs and FANETs:issues, threats, analysis of attacks, and solutions. IEEE Commun. Surv. Tutor. 2024, in press. [Google Scholar] [CrossRef]
- Laghari, A.A.; Jumani, A.K.; Laghari, R.A.; Li, H.; Karim, S.; Khan, A.A. Unmanned aerial vehicles advances in object detection and communication security review. Cogn. Robot. 2024, 4, 128–141. [Google Scholar] [CrossRef]
- Sai, S.; Garg, A.; Jhawar, K.; Chamola, V.; Sikdar, B. A comprehensive survey on artificial intelligence for unmanned aerial vehicles. IEEE Open J. Veh. Technol. 2023, 4, 713–738. [Google Scholar] [CrossRef]
- Abro, G.; Zulkifli, S.; Masood, R.; Asirvadam, V.; Laouiti, A. Comprehensive review of UAV detection, security, and communication advancements to prevent threats. Drones 2022, 6, 284. [Google Scholar] [CrossRef]
- Pandey, G.K.; Gurjar, D.S.; Nguyen, H.H.; Yadav, S. Security threats and mitigation techniques in UAV communications: A comprehensive survey. IEEE Access 2022, 10, 112858–112897. [Google Scholar] [CrossRef]
- Mekdad, Y.; Aris, A.; Babun, L.; Fergougui, A.E.; Conti, M.; Lazzeretti, R.; Uluagac, A.S. A survey on security and privacy issues of UAVs. Comput. Netw. 2023, 224, 109626. [Google Scholar] [CrossRef]
- Sarkar, N.I.; Gul, S. Artificial intelligence-based autonomous UAV networks: A survey. Drones 2023, 7, 322. [Google Scholar] [CrossRef]
- McEnroe, P.; Wang, S.; Liyanage, M. A survey on the convergence of edge computing and AI for UAVs: Opportunities and challenges. IEEE Internet Things J. 2022, 9, 15435–15459. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A comprehensive review of recent research trends on unmanned aerial vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Sarıkaya, B.S.; Bahtiyar, Ş. A survey on security of UAV and deep reinforcement learning. Ad Hoc Netw. 2024, 164, 103642. [Google Scholar] [CrossRef]
- Zolfaghari, B.; Abbasmollaei, M.; Hajizadeh, F.; Yanai, N.; Bibak, K. Secure UAV (drone) and the great promise of AI. ACM Comput. Surv. 2024, 56, 1–37. [Google Scholar] [CrossRef]
- Adil, M.; Song, H.; Mastorakis, S.; Abulkasim, H.; Farouk, A.; Jin, Z. UAV-assisted IoT applications, cybersecurity threats, AI-enabled solutions, open challenges with future research directions. IEEE Trans. Intell. Veh. 2024, 9, 4583–4605. [Google Scholar] [CrossRef]
- Tlili, F.; Ayed, S.; Chaari Fourati, L. Advancing UAV security with artificial intelligence: A comprehensive survey of techniques and future directions. Internet Things 2024, 27, 101281. [Google Scholar] [CrossRef]
- Zhao, C.; Du, H.; Niyato, D.; Kang, J.; Xiong, Z.; Kim, D.I.; Shen, X.; Letaief, K.B. Generative AI for secure physical layer communications: A survey. IEEE Trans. Cogn. Commun. Netw. 2025, 11, 3–26. [Google Scholar] [CrossRef]
- Kaleem, Z.; Orakzai, F.A.; Ishaq, W.; Latif, K.; Zhao, J.; Jamalipour, A. Emerging trends in UAVs: From placement, semantic communications to generative AI for mission-critical networks. IEEE Trans. Consum. Electron. 2024, in press. [Google Scholar] [CrossRef]
- Kumar, G.; Altalbe, A. Artificial intelligence (AI) advancements for transportation security: In-depth insights into electric and aerial vehicle systems. Environ. Dev. Sustain. 2024, in press. [Google Scholar] [CrossRef]
- Long, H.A.; French, D.P.; Brooks, J.M. Optimising the value of the critical appraisal skills programme (CASP) tool for quality appraisal in qualitative evidence synthesis. Res. Methods Med. Health Sci. 2020, 1, 31–42. [Google Scholar] [CrossRef]
- Alotaibi, A.; Chatwin, C.; Birch, P. Ubiquitous unmanned aerial vehicles (UAVs): A comprehensive review. Shanlax Int. J. Arts. Sci. Humanit. 2023, 11, 62–90. [Google Scholar] [CrossRef]
- Nabavi Chashmi, S.Y.; Asadi, D.; Ahmadi Dastgerdi, K. Safe land system architecture design of multi-rotors considering engine failure. Int. J. Aeronaut. Astronaut. 2022, 3, 7–19. [Google Scholar] [CrossRef]
- Alturki, N.; Aljrees, T.; Umer, M.; Ishaq, A.; Alsubai, S.; Saidani, O.; Djuraev, S.; Ashraf, I. An intelligent framework for cyber–physical satellite system and IoT-aided aerial vehicle security threat detection. Sensors 2023, 23, 7154. [Google Scholar] [CrossRef] [PubMed]
- He, L.; Bai, P.; Liang, X.; Zhang, J.; Wang, W. Feedback formation control of UAV swarm with multiple implicit leaders. Aerosp. Sci. Technol. 2018, 72, 327–334. [Google Scholar] [CrossRef]
- Rezaee, M.R.; Hamid, N.A.W.A.; Hussin, M.; Zukarnain, Z.A. Comprehensive review of drones collision avoidance schemes: Challenges and open issues. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6397–6426. [Google Scholar] [CrossRef]
- Cui, H.; Zhang, J.; Geng, Y.; Xiao, Z.; Sun, T.; Zhang, N.; Liu, J.; Wu, Q.; Cao, X. Space-air-ground integrated network (SAGIN) for 6G: Requirements, architecture and challenges. China Commun. 2022, 19, 90–108. [Google Scholar] [CrossRef]
- Alzahrani, A.A. VSKAP-IoD: A verifiably secure key agreement protocol for securing IoD environment. IEEE Access 2024, 12, 58039–58056. [Google Scholar] [CrossRef]
- Du, X.; Tao, S.; Yuan, K.; Li, Y.; Zhou, Y. A blockchain authentication scheme for UAV-aided fog computing. Complex Intell. Syst. 2024, 10, 1689–1702. [Google Scholar] [CrossRef]
- Tan, X.; Zuo, Z.; Su, S.; Guo, X.; Sun, X. Research of security routing protocol for UAV communication network based on AODV. Electronics 2020, 9, 1185. [Google Scholar] [CrossRef]
- Yue, Q.; Li, J.; Huang, Z.; Xie, X.; Yang, Q. Vulnerability assessment and topology reconstruction of task chains in UAV networks. Electronics 2024, 13, 2126. [Google Scholar] [CrossRef]
- Hashesh, A.O.; Hashima, S.; Zaki, R.M.; Fouda, M.M.; Hatano, K.; Eldien, A.S.T. AI-enabled UAV communications: Challenges and future directions. IEEE Access 2022, 10, 92048–92066. [Google Scholar] [CrossRef]
- Dicong, W.; Chenshuai, B.; Kaijun, W. Survey of video object detection based on deep learning. J. Front. Comput. Sci. Technol. 2021, 15, 1563. [Google Scholar]
- Alotaibi, E.; Nassif, N. Artificial intelligence in environmental monitoring: In-depth analysis. Discov. Artif. Intell. 2024, 4, 84. [Google Scholar] [CrossRef]
- Halder, S.; Afsari, K. Robots in inspection and monitoring of buildings and infrastructure: A systematic review. Appl. Sci. 2023, 13, 2304. [Google Scholar] [CrossRef]
- Shen, L.; Wang, N.; Zhu, Z.; Fan, Y.; Ji, X.; Mu, X. UAV-enabled data collection for mMTC networks: AEM modeling and energy-efficient trajectory design. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Anantrasirichai, N.; Bull, D. Artificial intelligence in the creative industries: A review. Artif. Intell. Rev. 2022, 55, 589–656. [Google Scholar] [CrossRef]
- Kurunathan, H.; Huang, H.; Li, K.; Ni, W.; Hossain, E. Machine learning-aided operations and communications of unmanned aerial vehicles: A contemporary survey. IEEE Commun. Surv. Tutor. 2023, 26, 496–533. [Google Scholar] [CrossRef]
- Teixeira, K.; Miguel, G.; Silva, H.S.; Madeiro, F. A survey on applications of unmanned aerial vehicles using machine learning. IEEE Access 2023, 11, 117582–117621. [Google Scholar] [CrossRef]
- Shrestha, R.; Omidkar, A.; Roudi, S.A.; Abbas, R.; Kim, S. Machine-learning-enabled intrusion detection system for cellular connected UAV networks. Electronics 2021, 10, 1549. [Google Scholar] [CrossRef]
- Mao, X.; Wu, G.; Fan, M.; Cao, Z.; Pedrycz, W. DL-DRL: A double-level deep reinforcement learning approach for large-scale task scheduling of multi-UAV. IEEE Trans. Autom. Sci. Eng. 2024, 22, 1028–1044. [Google Scholar] [CrossRef]
- Wu, X.; Li, W.; Hong, D.; Tao, R.; Du, Q. Deep learning for unmanned aerial vehicle-based object detection and tracking: A survey. IEEE Geosci. Remote Sens. Mag. 2021, 10, 91–124. [Google Scholar] [CrossRef]
- Raja, G.; Baskar, Y.; Dhanasekaran, P.; Nawaz, R.; Yu, K. An efficient formation control mechanism for multi-UAV navigation in remote surveillance. In Proceedings of the 2021 IEEE Globecom Workshops (GC Wkshps), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the NeurIPS, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Dai, Z.; Yang, Z.; Yang, Y.; Carbonell, J.; Le, Q.V.; Salakhutdinov, R. Transformer-xl: Attentive language models beyond a fixed-length context. arXiv 2019, arXiv:1901.02860. [Google Scholar]
- Chen, G.; Yu, X.; Ling, N.; Zhong, L. Typefly: Flying drones with large language model. arXiv 2023. submitted. [Google Scholar]
- Khan, A.; Gupta, S.; Gupta, S.K. Multi-hazard disaster studies: Monitoring, detection, recovery, and management, based on emerging technologies and optimal techniques. Int. J. Disaster Risk Reduct. 2020, 47, 101642. [Google Scholar] [CrossRef]
- Heuser, T.; Garri, K. KIWA—AI-based forest monitoring: Making forest fires in Germany even more manageable. Transform. Cities 2024, 9, 10–12. [Google Scholar]
- Bücheler, T. Drones and artificial intelligence in the construction industry. In Artificial Intelligence in Construction: Fundamentals and Use Cases; Springer: Berlin/Heidelberg, Germany, 2024; pp. 431–445. [Google Scholar]
- Morisaki, K.; Yumura, T. ChatDrone: LLM development and experiment of autonomous flight drone system using image recognition. IPSJ SIG Tech. Rep. 2025, 19, 1–4. [Google Scholar]
- Ikeyama, A.; Sato, K.; Yamauchi, S.; Suzuki, K. LLM dataset generation for drone flight path generation. In Proceedings of the JSME annual Conference on Robotics and Mechatronics (Robomec), Utsunomiya, Japan, 29 May–1 June 2024; The Japan Society of Mechanical Engineers: Tokyo, Japan; Volume 2024, p. 1P1-C01. [Google Scholar]
- Anil, C.; Durmus, E.; Panickssery, N.; Sharma, M.; Benton, J.; Kundu, S.; Batson, J.; Tong, M.; Mu, J.; Ford, D.; et al. Many-shot jailbreaking. Adv. Neural Inf. Process. Syst. 2024, 37, 129696–129742. [Google Scholar]
- Kurokawa, R.; Ohizumi, Y.; Kanzawa, J.; Kurokawa, M.; Sonoda, Y.; Nakamura, Y.; Kiguchi, T.; Gonoi, W.; Abe, O. Diagnostic performances of Claude 3 Opus and Claude 3.5 Sonnet from patient history and key images in Radiology’s “Diagnosis Please” cases. Jpn. J. Radiol. 2024, 42, 1–4. [Google Scholar] [CrossRef]
- Achiam, J.; Adler, S.; Agarwal, S.; Ahmad, L.; Akkaya, I.; Aleman, F.L.; Almeida, D.; Altenschmidt, J.; Altman, S.; Anadkat, S.; et al. Gpt-4 technical report. arXiv 2023, arXiv:2303.08774. [Google Scholar]
- Shibl, M.M.; Ismail, L.S.; Massoud, A.M. A machine learning-based battery management system for state-of-charge prediction and state-of-health estimation for unmanned aerial vehicles. J. Energy Storage 2023, 66, 107380. [Google Scholar] [CrossRef]
- Ashraf, S.N.; Manickam, S.; Zia, S.S.; Abro, A.A.; Obaidat, M.; Uddin, M.; Abdelhaq, M.; Alsaqour, R. IoT empowered smart cybersecurity framework for intrusion detection in internet of drones. Sci. Rep. 2023, 13, 18422. [Google Scholar] [CrossRef]
- Bao, F.S.; Li, M.; Qu, R.; Luo, G.; Wan, E.; Tang, Y.; Fan, W.; Tamber, M.S.; Kazi, S.; Sourabh, V.; et al. FaithBench: A diverse hallucination benchmark for summarization by modern LLMs. arXiv 2024, arXiv:2410.13210. [Google Scholar]
- Li, Y.; Xiang, Z.; Bastian, N.D.; Song, D.; Li, B. IDS-Agent: An LLM agent for explainable intrusion detection in IoT networks. In Proceedings of the NeurIPS 2024 Workshop on Open-World Agents, Vancouver, BC, Canada, 10–15 December 2024. [Google Scholar]
- Liu, R.; Gao, J.; Zhao, J.; Zhang, K.; Li, X.; Qi, B.; Ouyang, W.; Zhou, B. Can 1B LLM surpass 405B LLM? rethinking compute-optimal test-time scaling. arXiv 2024, arXiv:2502.06703. [Google Scholar]
- Neha, F.; Bhati, D. A Survey of DeepSeek Models. Authorea Prepr. 2025. submitted. [Google Scholar]
- Ahmed, I.; Islam, S.; Datta, P.P.; Kabir, I.; Chowdhury, N.U.R.; Haque, A. Qwen 2.5: A comprehensive review of the leading resource-efficient LLM with potentioal to surpass all competitors. TechRxiv 2025, submitted.
- Team, K.; Du, A.; Gao, B.; Xing, B.; Jiang, C.; Chen, C.; Li, C.; Xiao, C.; Du, C.; Liao, C.; et al. Kimi k1. 5: Scaling reinforcement learning with llms. arXiv 2024, arXiv:2501.12599. [Google Scholar]
- Abou-Kebeh, S.; Gil-Pita, R.; Rosa-Zurera, M. Application of deep learning to identify flutter flight testing signals parameters and analysis of real F-18 flutter flight test data. Aerospace 2025, 12, 34. [Google Scholar] [CrossRef]
- Ghimire, R.; Raji, A. Use of artificial intelligence in design, development, additive manufacturing, and certification of multifunctional composites for aircraft, drones, and spacecraft. Appl. Sci. 2024, 14, 1187. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Li, Y.; Xiao, W.; Wen, K.; Li, Z.; Zhang, Y.; Xiong, B. Machine learning assisted design of aluminum-lithium alloy with high specific modulus and specific strength. Mater. Des. 2023, 225, 111483. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Q.; Han, Y.; Ma, Y.; Zhao, H.; Nowak, A.; Li, J. Deep learning for ultra-fast and high precision screening of energy materials. Energy Storage Mater. 2021, 39, 45–53. [Google Scholar] [CrossRef]
- Chen, Z.; Shi, Z.; Chen, S.; Tong, S.; Dong, Y. Active flutter suppression for a flexible wing model with trailing-edge circulation control via reinforcement learning. AIP Adv. 2023, 13, 015317. [Google Scholar] [CrossRef]
- Zheng, H.; Wu, Z.; Duan, S.; Zhou, J. Research on feature extracted method for flutter test based on EMD and CNN. Int. J. Aerosp. Eng. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Bartels, R.E.; Scott, R.C. Computed and experimental flutter/LCO onset for the Boeing truss-braced wing wind tunnel model. In Proceedings of the 44th AIAA Fluid Dynamics Conference, Atlanta, GA, USA, 16–20 June 2014; p. 2446. [Google Scholar]
- Jia, W.; Chen, Q. Aircraft structural stress prediction based on multilayer perceptron neural network. Appl. Sci. 2024, 14, 9995. [Google Scholar] [CrossRef]
- Ai, L.; Soltangharaei, V.; Bayat, M.; Van Tooren, M.; Ziehl, P. Detection of impact on aircraft composite structure using machine learning techniques. Meas. Sci. Technol. 2021, 32, 084013. [Google Scholar] [CrossRef]
- Zheng, H. The System Stability Criterion Based on Neural Network and Its Application in FBP. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, 2007. [Google Scholar]
- Khan, A.; Lee, C.H.; Huang, P.Y.; Clark, B.K. Leveraging generative adversarial networks to create realistic scanning transmission electron microscopy images. npj Comput. Mater. 2023, 9, 85. [Google Scholar] [CrossRef]
- Scott, R.C.; Pado, L.E. Active control of wind-tunnel model aeroelastic response using neural networks. J. Guid. Control Dyn. 2000, 23, 1100–1108. [Google Scholar] [CrossRef]
- Berenguer, A.; Morejón, A.; Tomás, D.; Mazón, J.N. Leveraging large language models for sensor data retrieval. Appl. Sci. 2024, 14, 2506. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, M.; Ji, Z.; Bai, J.; Guo, Y.; Zuo, W. LLM as a complementary optimizer to gradient descent: A case study in prompt tuning. arXiv 2024. submitted. [Google Scholar]
- Tang, Y.; Xu, W.; Cao, J.; Ma, J.; Gao, W.; Farrell, S.; Erichson, B.; Mahoney, M.W.; Nonaka, A.; Yao, Z. MatterChat: A multi-modal LLM for material science. arXiv 2025, arXiv:2502.13107. [Google Scholar]
- Qi, S.; Cheng, Y.; Li, Z.; Wang, J.; Li, H.; Zhang, C. Advanced deep learning techniques for battery thermal management in new energy vehicles. Energies 2024, 17, 4132. [Google Scholar] [CrossRef]
- Yavas, U.; Kurtulus, C.; Genc, U. Battery management with AI for better and safer batteries. ATZelectron. Worldw. 2024, 19, 8–13. [Google Scholar] [CrossRef]
- Zhao, J.; Qu, X.; Wu, Y.; Fowler, M.; Burke, A.F. Artificial intelligence-driven real-world battery diagnostics. Energy AI 2024, 18, 100419. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, G.; Zhou, M.; Li, G. A comprehensive review of research hotspots on battery management systems for UAVs. IEEE Access 2023, 11, 84636–84650. [Google Scholar] [CrossRef]
- Younes, M.; Kwan, A.; Akbarpour, M.; Helaoui, M.; Ghannouchi, F.M. Two-dimensional piecewise behavioral model for highly nonlinear dual-band transmitters. IEEE Trans. Ind. Electron. 2017, 6, 8666–8675. [Google Scholar] [CrossRef]
- Severson, K.A.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Fraggedakis, D.; et al. Data-driven prediction of battery cycle life before capacity degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar] [CrossRef]
- Vyas, V.; Xu, Z. Key safety design overview in AI-driven autonomous and battery-electric vehicles. In Proceedings of the 2024 2nd International Conference on Advancements and Key Challenges in Green Energy and Computing (AKGEC), Ghaziabad, India, 21–23 November 2024; pp. 1–8. [Google Scholar]
- Liu, K.; Wei, Z.; Zhang, C.; Shang, Y.; Teodorescu, R.; Han, Q.L. Towards long lifetime battery: AI-based manufacturing and management. IEEE/CAA J. Autom. Sin. 2022, 9, 1139–1165. [Google Scholar] [CrossRef]
- Wu, D.; Xu, Z.; Wang, Q.; Jin, Z.; Xu, Y.; Wang, C.; He, X. A brief review of key technologies for cloud-based battery management systems. J. Electron. Mater. 2024, 53, 7334–7354. [Google Scholar] [CrossRef]
- Borah, M.; Wang, Q.; Moura, S.; Sauer, D.U.; Li, W. Synergizing physics and machine learning for advanced battery management. Commun. Eng. 2024, 3, 134. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Miah, M.S.; Jamal, T.; Rahman, T.; Ansari, S.; Rahman, M.S.; Ashique, R.H.; Shihavuddin, A.S.M.; Shakib, M.N. Artificial intelligence approaches for advanced battery management system in electric vehicle applications: A statistical analysis towards future research opportunities. Vehicles 2023, 6, 22–70. [Google Scholar] [CrossRef]
- Pamshetti, V.B.; Zhang, W.; Tseng, K.J.; Ng, B.K.; Yan, Q. Optimal signal decomposition-based multi-stage learning for battery health estimation. arXiv 2025, arXiv:2501.16377. [Google Scholar]
- Zhao, J.; Feng, X.; Pang, Q.; Wang, J.; Lian, Y.; Ouyang, M.; Burke, A.F. Battery prognostics and health management from a machine learning perspective. J. Power Sources 2023, 581, 233474. [Google Scholar] [CrossRef]
- Yunusoglu, A.; Le, D.; Tiwari, K.; Isik, M.; Dikmen, I.C. Battery state of health estimation using LLM framework. arXiv 2024, arXiv:2501.18123. [Google Scholar]
- Feng, Y.; Hu, G.; Zhang, Z. Gpt4battery: An llm-driven framework for adaptive state of health estimation of raw li-ion batteries. arXiv 2024, arXiv:2402.00068. [Google Scholar]
- Peng, H.; Liu, C.; Li, H. Large-language-model-enabled health management for Internet of batteries in electric vehicles. IEEE Internet Things J. 2025, 12, 6082–6094. [Google Scholar] [CrossRef]
- Wei, X.; Wang, L. SigFeaDet: Signal features-based UAV GPS spoofing detection using machine learning. In Proceedings of the 2023 IEEE 29th International Conference on Parallel and Distributed Systems (ICPADS), Ocean Flower Island, China, 17–21 December 2023; pp. 2202–2209. [Google Scholar]
- Dang, Y.; Benzaid, C.; Taleb, T.; Yang, B.; Shen, Y. Transfer learning based GPS spoofing detection for cellular-connected UAVs. In Proceedings of the 2022 International Wireless Communications and Mobile Computing (IWCMC), Dubrovnik, Croatia, 30 May–3 June 2022; pp. 629–634. [Google Scholar]
- Wei, X.; Wang, Y.; Sun, C. PerDet: Machine-learning-based UAV GPS spoofing detection using perception data. Remote Sens. 2022, 14, 4925. [Google Scholar] [CrossRef]
- Alzahrani, M.Y. Enhancing drone security through multi-sensor anomaly detection and machine learning. SN Comput. Sci. 2024, 5, 651. [Google Scholar] [CrossRef]
- Wu, Z.; Fan, K.; Wu, G.; Chen, Y.; He, X.; He, Q. Research on positioning deception of multi-rotor UAV based on adaptive neural network kalman filtering algorithm. In Proceedings of the 2024 IEEE 19th Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 5–8 August 2024; pp. 1–7. [Google Scholar]
- Li, Z.; Chen, Q.; Li, J.; Huang, J.; Mo, W.; Wong, D.S.; Jiang, H. A secure and efficient UAV network defense strategy: Convergence of blockchain and deep learning. Comput. Stand. Interfaces 2024, 90, 103844. [Google Scholar] [CrossRef]
- Park, D.k.; Lee, W.j.; Kim, B.j.; Lee, J.y. Unsupervised learning-based threat detection system using radio frequency signal characteristic data. J. Internet Comput. Serv. 2024, 25, 147–155. [Google Scholar]
- Dudukcu, H.V.; Taskiran, M.; Kahraman, N. UAV sensor data applications with deep neural networks: A comprehensive survey. Eng. Appl. Artif. Intell. 2023, 123, 106476. [Google Scholar] [CrossRef]
- Shafique, A.; Mehmood, A.; Elhadef, M. Detecting signal spoofing attack in UAVs using machine learning models. IEEE Access 2021, 9, 93803–93815. [Google Scholar] [CrossRef]
- Alhoraibi, L.; Alghazzawi, D.; Alhebshi, R. Detection of GPS spoofing attacks in UAVs based on adversarial machine learning model. Sensors 2024, 24, 6156. [Google Scholar] [CrossRef]
- AlAbidy, A.; Zaben, A.; Abu-Sharkh, O.M.; Noman, H.A. A survey on AI-based detection methods of GPS spoofing attacks on UAVs. In Proceedings of the 2024 IEEE 12th International Conference on Intelligent Systems (IS), Varna, Bulgaria, 29–31 August 2024; pp. 1–13. [Google Scholar]
- Talaei Khoei, T.; Ismail, S.; Shamaileh, K.A.; Devabhaktuni, V.K.; Kaabouch, N. Impact of dataset and model parameters on machine learning performance for the detection of GPS spoofing attacks on unmanned aerial vehicles. Appl. Sci. 2022, 13, 383. [Google Scholar] [CrossRef]
- Sung, Y.H.; Park, S.J.; Kim, D.Y.; Kim, S. GPS spoofing detection method for small UAVs using 1D convolution neural network. Sensors 2022, 22, 9412. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, S.; Vashistha, H.; Curtis, K.; Mallipeddi, A.; Mathur, A.; Ross, J.; Gou, L. MAG-V: A multi-agent framework for synthetic data generation and verification. arXiv 2025, arXiv:2412.04494. [Google Scholar]
- Wang, S.; Wang, J.; Su, C.; Ma, X. Intelligent detection algorithm against UAVs’ GPS spoofing attack. In Proceedings of the 2020 IEEE 26th International Conference on Parallel and Distributed Systems (ICPADS), Hong Kong, China, 2–4 December 2020; pp. 382–389. [Google Scholar]
- Xue, N.; Niu, L.; Hong, X.; Li, Z.; Hoffaeller, L.; Pöpper, C. DeepSIM: GPS spoofing detection on UAVs using satellite imagery matching. In Proceedings of the Annual Computer Security Applications Conference, Austin, TX, USA, 7–11 December 2020; pp. 304–319. [Google Scholar]
- Dharmalingam, B.; Mukherjee, R.; Piggott, B.; Feng, G.; Liu, A. Aero-LLM: A distributed framework for secure UAV communication and intelligent decision-making. arXiv 2024, arXiv:2502.05220. [Google Scholar]
- Li, A.; Zhao, Y.; Qiu, C.; Kloft, M.; Smyth, P.; Rudolph, M.; Mandt, S. Anomaly detection of tabular data using LLMs. arXiv 2024, arXiv:2406.16308. [Google Scholar]
- Yasin, J.N.; Mohamed, S.A.S.; Haghbayan, M.H.; Heikkonen, J.; Tenhunen, H.; Plosila, J. Unmanned aerial vehicles (UAVs): Collision avoidance systems and approaches. IEEE Access 2020, 8, 105139–105155. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, Z.; Wen, X.; Zhu, J.; Xu, C.; Gao, F. Decentralized spatial-temporal trajectory planning for multicopter swarms. arXiv 2021, arXiv:2106.12481. [Google Scholar]
- Zhou, X.; Zhu, J.; Zhou, H.; Xu, C.; Gao, F. EGO-swarm: A fully autonomous and decentralized quadrotor swarm system in cluttered environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 2021; pp. 4101–4107. [Google Scholar]
- Lu, M.; Chen, H.; Lu, P. Perception and avoidance of multiple small fast moving objects for quadrotors with only low-cost RGBD camera. IEEE Robot. Autom. Lett. 2022, 7, 11657–11664. [Google Scholar] [CrossRef]
- Xu, Z.; Zhan, X.; Xiu, Y.; Suzuki, C.; Shimada, K. Low computational-cost detection and tracking of dynamic obstacles for mobile robots with RGB-D cameras. arXiv 2023, arXiv:2303.00132v2. [Google Scholar]
- Xu, Z.; Zhan, X.; Xiu, Y.; Suzuki, C.; Shimada, K. Onboard dynamic-object detection and tracking for autonomous robot navigation with RGB-D camera. IEEE Robot. Autom. Lett. 2024, 9, 651–658. [Google Scholar] [CrossRef]
- Chen, G.; Dong, W.; Peng, P.; Alonso-Mora, J.; Zhu, X. Continuous occupancy mapping in dynamic environments using particles. IEEE Trans. Robot. 2023, 40, 64–84. [Google Scholar] [CrossRef]
- Tordesillas, J.; How, J.P. MADER: Trajectory planner in multi-agent and dynamic environments. IEEE Trans. Robot. 2022, 38, 463–476. [Google Scholar] [CrossRef]
- Xu, Z.; Xiu, Y.; Zhan, X.; Chen, B.; Shimada, K. Vision-aided UAV navigation and dynamic obstacle avoidance using gradient-based B-spline trajectory optimization. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), ExCeL, London, UK, 29 May 2023; pp. 1214–1220. [Google Scholar]
- Huang, Z.; Chen, H.; Pohovey, J.; Driggs-Campbell, K. Neural informed rrt*: Learning-based path planning with point cloud state representations under admissible ellipsoidal constraints. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 8742–8748. [Google Scholar]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Rezwan, S.; Choi, W. Artificial intelligence approaches for UAV navigation: Recent advances and future challenges. IEEE Access 2022, 10, 26320–26339. [Google Scholar] [CrossRef]
- Zhong, J.; Li, M.; Chen, Y.; Wei, Z.; Yang, F.; Shen, H. A safer vision-based autonomous planning system for quadrotor uavs with dynamic obstacle trajectory prediction and its application with LLMs. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 4–8 January 2024; pp. 920–929. [Google Scholar]
- He, Z.; Zou, E.; Guan, C.; Pang, B.; Tang, G.; Ding, J. Research and application of 5G remote control UAV with aerial electronic fence. J. Phys. Conf. Ser. 2023, 2419, 012109. [Google Scholar] [CrossRef]
- Shen, S.E.; Huang, Y.C. Application of reinforcement learning in controlling quadrotor UAV flight actions. Drones 2024, 8, 660. [Google Scholar] [CrossRef]
- Duc Bui, V.; Shirakawa, T.; Sato, H. Autonomous unmanned aerial vehicle flight control using multi-task deep neural network for exploring indoor environments. SICE J. Control Meas. Syst. Integr. 2022, 15, 130–144. [Google Scholar] [CrossRef]
- Bøhn, E.; Coates, E.M.; Reinhardt, D.; Johansen, T.A. Data-efficient deep reinforcement learning for attitude control of fixed-wing UAVs: Field experiments. IEEE Trans. Neural Netw. Learn. Syst. 2023, 35, 3168–3180. [Google Scholar] [CrossRef]
- Tseng, T.; McLean, E.; Pelrine, K.; Wang, T.T.; Gleave, A. Can Go AIs be adversarially robust? arXiv 2025, arXiv:2406.12843v3. [Google Scholar] [CrossRef]
- Ahmed, A.; Farhan, M.; Eesaar, H.; Chong, K.T.; Tayara, H. From detection to action: A multimodal AI framework for traffic incident response. Drones 2024, 8, 741. [Google Scholar] [CrossRef]
- Guo, Q.; Li, X.; Zhou, Z.; Ma, D.; Wang, Y. Neural network-based aeroelastic system identification for predicting flutter of high flexibility wings. Sci. Rep. 2025, 15, 623. [Google Scholar] [CrossRef] [PubMed]
- Al-Sabbagh, A.; El-Bokhary, A.; El-Koussa, S.; Jaber, A.; Elkhodr, M. Enhancing UAV security against GPS spoofing attacks through a genetic algorithm-driven deep learning framework. Information 2025, 16, 115. [Google Scholar] [CrossRef]
- Alali, M.; Imani, M. Bayesian reinforcement learning for navigation planning in unknown environments. Front. Artif. Intell. 2024, 7, 1308031. [Google Scholar] [CrossRef]
- Xue, D.; Zhou, X.; Wang, M. Formation control and path planning of multi-robot systems via large language model. Sci. China Inf. Sci. 2025, 68, 150205. [Google Scholar] [CrossRef]
- Fasano, G.; Accado, D.; Moccia, A.; Moroney, D. Sense and avoid for unmanned aircraft systems. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 82–110. [Google Scholar] [CrossRef]
- Chen, L.; Wang, W.; Zhu, J. Learning transferable UAV for forest visual perception. In Proceedings of the Twenty-Seventh International Joint Conference On Artificial Intelligence(IJCAI), Stockholm, Sweden, 13–19 July 2018; pp. 4883–4889. [Google Scholar]
- He, Y. Mission-driven autonomous perception and fusion based on UAV swarm. Chin. J. Aeronaut. 2020, 33, 2831–2834. [Google Scholar] [CrossRef]
- Wang, X.; Wang, J.; Xu, Y.; Chen, J.; Jia, L.; Liu, X.; Yang, Y. Dynamic spectrum anti-jamming communications: Challenges and opportunities. IEEE Commun. Mag. 2020, 58, 79–85. [Google Scholar] [CrossRef]
- Dong, R.; Wang, B.; Cao, K. Deep learning driven 3D robust beamforming for secure communication of UAV systems. IEEE Wirel. Commun. Lett. 2021, 10, 1643–1647. [Google Scholar] [CrossRef]
- Pang, X.; Guo, S.; Tang, J.; Zhao, N.; Al-Dhahir, N. Dynamic ISAC beamforming design for UAV-enabled vehicular networks. IEEE Trans. Wirel. Commun. 2024, 23, 16852–16864. [Google Scholar] [CrossRef]
- Goudos, S.K.; Athanasiadou, G. Application of an ensemble method to UAV power modeling for cellular communications. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2340–2344. [Google Scholar] [CrossRef]
- Pan, Z.; Jiang, Y.; Garg, S.; Schneider, A.; Nevmyvaka, Y.; Song, D. S2IP-LLM: Semantic Space Informed Prompt Learning with LLM for Time Series Forecasting. In Proceedings of the 37th Annual Conference on Learning Theory (COLT 2024), Edmonton, AB, Canada, 30 June 2024; pp. 39135–39153. [Google Scholar]
- Mrabet, M.; Sliti, M.; Ammar, L.B. Machine learning algorithms applied for drone detection and classification: Benefits and challenges. Front. Commun. Netw. 2024, 5, 1440727. [Google Scholar] [CrossRef]
- Allahham, M.S.; Khattab, T.; Mohamed, A. Deep Learning for RF-based drone detection and Identification: A multi-channel 1-D convolutional neural networks approach. In Proceedings of the 2020 IEEE International Conference on Informatics, IoT, and Enabling Technologies (ICIoT), Doha, Qatar, 1–5 February 2020; pp. 112–117. [Google Scholar]
- Akter, R.; Doan, V.S.; Lee, J.M.; Kim, D.S. CNN-SSDI: Convolution neural network inspired surveillance system for UAVs detection and identification. Comput. Netw. 2021, 201, 108519. [Google Scholar] [CrossRef]
- Han, L.; Xun, Y.; Liu, J.; Benslimane, A.; Zhang, Y. DP-Authentication: A novel deep learning based drone pilot authentication scheme. Ad Hoc Netw. 2023, 147, 103180. [Google Scholar] [CrossRef]
- Hu, J.; Wang, D.; Wang, Z.; Pang, X.; Xu, H.; Ren, J.; Ren, K. Federated large language model: Solutions, challenges and future directions. IEEE Wirel. Commun. 2024, 1–8, in press. [Google Scholar] [CrossRef]
- Chen, F.; Han, M.; Zhao, H.; Zhang, Q.; Shi, J.; Xu, S.; Xu, B. X-LLM: Bootstrapping advanced large language models by treating multi-modalities as foreign languages. arXiv 2023, arXiv:2305.04160. [Google Scholar]
- Wu, X.W.; Yang, E.H.; Wang, J. Lightweight security protocols for the Internet of Things. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar]
- Ozmen, M.O.; Yavuz, A.A. Dronecrypt - an efficient cryptographic framework for small aerial drones. In Proceedings of the MILCOM 2018 - 2018 IEEE Military Communications Conference (MILCOM), Los Angeles, CA, USA, 29–31 October 2018; pp. 1–6. [Google Scholar]
- Saini, A.; Sehrawat, R. Enhancing data security through machine learning-based key generation and encryption. Eng. Technol. Appl. Sci. Res. 2024, 14, 14148–14154. [Google Scholar] [CrossRef]
- Alshammari, S.; Alganmi, N.; Ba-Aoum, M.; Binyamin, S.; AL-Ghamdi, A.; Ragab, M. Hybrid arithmetic optimization algorithm with deep learning model for secure unmanned aerial vehicle networks. AIMS Math. 2024, 9, 7131–7151. [Google Scholar] [CrossRef]
- Khan, A.N.; Yu Fan, M.; Malik, A.; Husain, M.A. Cryptanalyzing merkle-hellman public key cryptosystem with artificial neural networks. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Pune, India, 29–31 March 2019; pp. 1–7. [Google Scholar]
- Nitaj, A.; Rachidi, T. Applications of neural network-based AI in cryptography. Cryptography 2023, 7, 39. [Google Scholar] [CrossRef]
- Chen, B.W.; Rho, S. Autonomous tactical deployment of the UAV array using self-organizing swarm intelligence. IEEE Consum. Electron. Mag. 2020, 9, 52–56. [Google Scholar] [CrossRef]
- Yaacoub, E.; Abualsaud, K.; Mahmoud, M. Hybrid encryption for securing and tracking goods delivery by multipurpose unmanned aerial vehicles in rural areas using cipher block chaining and physical layer security. Drones 2024, 8, 111. [Google Scholar] [CrossRef]
- Liu, C.; Wang, Y.; Wang, Q. PARouting: Prediction-supported adaptive routing protocol for FANETs with deep reinforcement learning. Int. J. Intell. Netw. 2023, 4, 113–121. [Google Scholar] [CrossRef]
- Sbeiti, M.; Goddemeier, N.; Behnke, D.; Wietfeld, C. PASER: Secure and efficient routing approach for airborne mesh networks. IEEE Trans. Wirel. Commun. 2016, 15, 1950–1964. [Google Scholar] [CrossRef]
- Luo, F.; Zhou, J.; Chen, P.; Dong, Y.; Lu, L. Optimization algorithm for AODV-based unmanned cluster routing with multiple QoS objectives. In Proceedings of the 2024 11th International Conference on Wireless Communication and Sensor Networks (icWCSN), Chengdu, China, 12–14 April 2024; pp. 80–88. [Google Scholar]
- Wang, Y.; Feng, X.; Li, F.; Xian, Q.; Jia, Z.H.; Du, Z.; Liu, C. Lightweight visual localization algorithm for UAVs. Sci. Rep. 2025, 15, 6069. [Google Scholar] [CrossRef]
- Li, S.; Jia, Y.; Yang, F.; Qin, Q.; Gao, H.; Zhou, Y. Collaborative decision-making method for multi-UAV based on multiagent reinforcement learning. IEEE Access 2022, 10, 91385–91396. [Google Scholar] [CrossRef]
- Wassim, L.; Mohamed, K.; Hamdi, A. LLM-DaaS: LLM-driven drone-as-a-service operations from text user requests. arXiv 2024, arXiv:2412.11672. [Google Scholar]
- Chen, D.; Qi, Q.; Fu, Q.; Wang, J.; Liao, J.; Han, Z. Transformer-based reinforcement learning for scalable multi-UAV area coverage. IEEE Trans. Intell. Transp. Syst. 2024, 25, 10062–10077. [Google Scholar] [CrossRef]
- Zheng, L.; Ai, P.; Wu, Y. Building recognition of UAV remote sensing images by deep learning. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 19–24 July 2020; pp. 1185–1188. [Google Scholar]
- Rodriguez-Pineiro, J.; Liu, W.; Wang, Y.; Yin, X.; Lee, J.; Kim, M. Deep learning-based joint communication and sensing for 6G cellular-connected UAVs. In Proceedings of the 2022 16th European Conference on Antennas and Propagation (EuCAP), Madrid, Spain, 27 March–1 April 2022; pp. 1–2. [Google Scholar]
- Jia, L.; Qi, N.; Chu, F.; Fang, S.; Wang, X.; Ma, S.; Feng, S. Game-theoretic learning anti-jamming approaches in wireless networks. IEEE Commun. Mag. 2022, 60, 60–66. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, G.; Wu, Q.; Li, J.; Liang, S.; Niyato, D.; Leung, V.C. UAV swarm-enabled collaborative secure relay communications with time-domain colluding eavesdropper. IEEE Trans. Mob. Comput. 2024, 23, 8601–8619. [Google Scholar] [CrossRef]
- Cheng, S.; Ling, X.; Zhu, L. Deep reinforcement learning-based anti-jamming approach for fast frequency hopping systems. IEEE Open J. Commun. Soc. 2025, 6, 961–971. [Google Scholar] [CrossRef]
- Han, L.; Zhong, X.; Zhang, Y. MTL-PIE: A multi-task learning based drone pilot identification and operation evaluation scheme. Veh. Commun. 2024, 47, 100760. [Google Scholar] [CrossRef]
- Zheng, J.Y.; Zhang, H.; Wang, L.; Qiu, W.; Zheng, H.W.; Zheng, Z.M. Safely learning with private data: A federated learning framework for large language model. In Proceedings of the 2024 Conference on Empirical Methods in Natural Language Processing, Miami, FL, USA, 12–16 November 2024; pp. 5293–5306. [Google Scholar]
- Cui, Y.; Zhang, Q.; Feng, Z.; Wei, Z.; Shi, C.; Yang, H. Topology-aware resilient routing protocol for FANETs: An adaptive Q -learning approach. IEEE Internet Things J. 2022, 9, 18632–18649. [Google Scholar] [CrossRef]
- Xu, M.; Niyato, D.; Zhang, H.; Kang, J.; Xiong, Z.; Mao, S.; Han, Z. Cached model-as-a-resource: Provisioning large language model agents for edge intelligence in space-air-ground integrated networks. arXiv 2024, arXiv:2403.05826. [Google Scholar]
- Kwon, W.; Li, Z.; Zhuang, S.; Sheng, Y.; Zheng, L.; Yu, C.H.; Gonzalez, J.E.; Zhang, H.; Stoica, I. Efficient memory management for large language model serving with paged attention. arXiv 2023, arXiv:2309.06180v1. [Google Scholar]
- Sun, C.; Fontanesi, G.; Canberk, B.; Mohajerzadeh, A.; Chatzinotas, S.; Grace, D.; Ahmadi, H. Advancing UAV communications: A comprehensive survey of cutting-edge machine learning techniques. IEEE Open J. Veh. Technol. 2024, 5, 825–854. [Google Scholar] [CrossRef]
- Hassan, S.S.; Park, Y.M.; Tun, Y.K.; Saad, W.; Han, Z.; Hong, C.S. Satellite-based ITS data offloading & computation in 6G networks: A cooperative multi-agent proximal policy optimization DRL with attention approach. IEEE Trans. Mob. Comput. 2024, 23, 4956–4974. [Google Scholar]
- Zheng, Z.; Ren, X.; Xue, F.; Luo, Y.; Jiang, X.; You, Y. Response length perception and sequence scheduling: An LLM-empowered LLM inference pipeline. Adv. Neural Inf. Process. Syst. 2023, 36, 65517–65530. [Google Scholar]
- Qu, G.; Chen, Q.; Wei, W.; Lin, Z.; Chen, X.; Huang, K. Mobile edge intelligence for large language models: A contemporary survey. IEEE Commun. Surv. Tutor. 2025. submitted. [Google Scholar] [CrossRef]
- Rey, L.; Bernardos, A.M.; Dobrzycki, A.D.; Carramiñana, D.; Bergesio, L.; Besada, J.A.; Casar, J.R. A Performance Analysis of You Only Look Once Models for Deployment on Constrained Computational Edge Devices in Drone Applications. Electronics 2025, 14, 638. [Google Scholar] [CrossRef]
- Bravo, R.Z.B.; Leiras, A.; Cyrino Oliveira, F.L. The use of UAVs in humanitarian relief: An application of POMDP-based methodology for finding victims. Prod. Oper. Manag. 2019, 28, 421–440. [Google Scholar] [CrossRef]
- Zhu, X.; Li, J.; Liu, Y.; Ma, C.; Wang, W. A survey on model compression for large language models. Trans. Assoc. Comput. Linguist. 2024, 12, 1556–1577. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as mobile infrastructure: Addressing battery lifetime. IEEE Commun. Mag. 2019, 57, 132–137. [Google Scholar] [CrossRef]
- Xu, Q.; Su, Z.; Li, R. Security and privacy in artificial intelligence-enabled 6G. IEEE Netw. 2022, 36, 188–196. [Google Scholar] [CrossRef]
- Kim, S.; Yun, S.; Lee, H.; Gubri, M.; Yoon, S.; Oh, S.J. Propile: Probing privacy leakage in large language models. Adv. Neural Inf. Process. Syst. 2023, 36, 20750–20762. [Google Scholar]
- Boateng, G.O.; Sami, H.; Alagha, A.; Elmekki, H.; Hammoud, A.; Mizouni, R.; Mourad, A.; Otrok, H.; Bentahar, J.; Muhaidat, S.; et al. A survey on large language models for communication, network, and service management: Application insights, challenges, and future directions. arXiv 2024, arXiv:2412.19823v1. [Google Scholar] [CrossRef]
- Zhang, Y.; Rasmussen, K. Detection of electromagnetic interference attacks on sensor systems. In Proceedings of the 2020 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 18 May 2020; pp. 203–216. [Google Scholar]
- Sriramanan, G.; Bharti, S.; Sadasivan, V.S.; Saha, S.; Kattakinda, P.; Feizi, S. LLM-check: Investigating detection of hallucinations in large language models. Adv. Neural Inf. Process. Syst. 2024, 37, 34188–34216. [Google Scholar]
- Moberg, R.; Wilson, C.G.; Goldstein, R. Data standards, device interfaces, and interoperability. In Neurocritical Care Informatics: Translating Raw Data into Bedside Action; Springer: Berlin/Heidelberg, Germany, 2019; pp. 13–30. [Google Scholar]
- Asaamoning, G.; Mendes, P.; Rosário, D.; Cerqueira, E. Drone swarms as networked control systems by integration of networking and computing. Sensors 2021, 21, 2642. [Google Scholar] [CrossRef] [PubMed]
- Yang, P.; Cao, X.; Quek, T.Q.; Wu, D.O. Networking of Internet of UAVs: Challenges and intelligent approaches. IEEE Wirel. Commun. 2022, 31, 156–163. [Google Scholar] [CrossRef]
- Long, S.; Tan, J.; Mao, B.; Tang, F.; Li, Y.; Zhao, M.; Kato, N. A survey on intelligent network operations and performance optimization based on large language models. IEEE Commun. Surv. Tutor. 2025, in press. [Google Scholar] [CrossRef]
- Zhao, F.; Zhang, C.; Geng, B. Deep multimodal data fusion. ACM Comput. Surv. 2024, 56, 1–36. [Google Scholar] [CrossRef]
- Chen, S.; Wu, Z.; Zhang, K.; Li, C.; Zhang, B.; Ma, F.; Yu, F.R.; Li, Q. Exploring embodied multimodal large models: Development, datasets, and future directions. arXiv 2025, arXiv:2502.15336v1. [Google Scholar] [CrossRef]
- Hu, Z.; Yang, W.; Zhang, M.; Lei, C.; Liang, H.; Zhou, F.; Wu, Q. Toward embodied intelligence: An autonomous exploration system for multimodal UAV. In Proceedings of the 2024 International Conference on Ubiquitous Communication (Ucom), Xi’an, China, 5 July 2024; pp. 444–448. [Google Scholar]
- Dong, M.; Chen, B.M.; Cai, G.; Peng, K. Development of a real-time onboard and ground station software system for a UAV helicopter. J. Aerosp. Comput. Inf. Commun. 2007, 4, 933–955. [Google Scholar] [CrossRef]
- Mao, B.; Tang, F.; Kawamoto, Y.; Kato, N. Optimizing computation offloading in satellite-UAV-served 6G IoT: A deep learning approach. IEEE Netw. 2021, 35, 102–108. [Google Scholar] [CrossRef]
- Javaid, S.; Khalil, R.A.; Saeed, N.; He, B.; Alouini, M.S. Leveraging large language models for integrated satellite-aerial-terrestrial networks: Recent advances and future directions. IEEE Open J. Commun. Soc. 2024, 6, 399–432. [Google Scholar] [CrossRef]
- Cao, X.; Nan, G.; Guo, H.; Mu, H.; Wang, L.; Lin, Y.; Zhou, Q. Exploring LLM-based multi-agent situation awareness for zero-trust space-air-ground integrated network. IEEE J. Sel. Areas Commun. 2025. in print. [Google Scholar] [CrossRef]
- Dwivedi, U.; Rajawat, A.S.; Goyal, S.; Faisal, S.; Sulakhe, V.N.; Sudhir, M. AI-enabled UAVs for advanced network management in the era of 6G communications. In Proceedings of the International Conference on Intelligent Computing & Optimization, Phnom Penh, Cambodia, 26 October 2023; pp. 349–358. [Google Scholar]
- Raja, K.; Kottursamy, K.; Ravichandran, V.; Balaganesh, S.; Dev, K.; Nkenyereye, L.; Raja, G. An efficient 6G federated learning-enabled energy-efficient scheme for UAV deployment. IEEE Trans. Veh. Technol. 2024, 72, 2057–2066. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, J.; Lu, L.; Zhang, T.; Qiu, T.; Wang, C.; Liu, Y. Enabling intelligent connectivity: A survey of secure isac in 6g networks. IEEE Commun. Surv. Tutor. 2024, in press. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y.; Wang, J.; Sun, G.; Niyato, D. Embodied AI-empowered low altitude economy: Integrated sensing, communications, computation, and control (ISC3). arXiv 2024, arXiv:2412.19996. [Google Scholar]
- Li, H.; Xiao, M.; Wang, K.; Kim, D.I.; Debbah, M. Large language model based multi-objective optimization for integrated sensing and communications in uav networks. IEEE Wirel. Commun. Lett. 2025, in press. [Google Scholar] [CrossRef]
- Fan, J.; Ren, P.; Chen, J.; Qian, J.; Wang, J.; Jiang, C. Diffusion-based semantic communication assisted low-altitude intelligent service for IoT. IEEE Internet Things J. 2025, in press. [Google Scholar] [CrossRef]
- Hu, H.; Zhu, X.; Zhou, F.; Wu, W.; Hu, R.Q.; Zhu, H. Resource allocation for multi-modal semantic communication in UAV collaborative networks. IEEE Trans. Commun. 2025, in press. [Google Scholar] [CrossRef]
- Zhao, W.; Aldyaflah, I.M.; Gangwani, P.; Joshi, S.; Upadhyay, H.; Lagos, L. A blockchain-facilitated secure sensing data processing and logging system. IEEE Access 2023, 11, 21712–21728. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | LLM | Countermeasures | Traditional AI | |||||
|---|---|---|---|---|---|---|---|---|---|
| Taxonomy | Applications | Challenges | UAV Safety | UAV Security | Taxonomy | Applications | Limitations | ||
| [43] | 2022 | ✓ | ✓ | ✓ | ✓ | ||||
| [39] | 2022 | ✓ | ✓ | ✓ | |||||
| [40] | 2022 | ✓ | ✓ | ✓ | |||||
| [35] | 2022 | ✓ | ✓ | ||||||
| [44] | 2023 | ✓ | ✓ | ✓ | |||||
| [41] | 2023 | ✓ | ✓ | ✓ | |||||
| [38] | 2023 | ✓ | ✓ | ✓ | ✓ | ||||
| [42] | 2023 | ✓ | ✓ | ||||||
| [36] | 2024 | ✓ | ✓ | ||||||
| [45] | 2024 | ✓ | ✓ | ✓ | ✓ | ||||
| [48] | 2024 | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| [51] | 2024 | ✓ | ✓ | ✓ | ✓ | ||||
| [50] | 2024 | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| [9] | 2024 | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| [49] | 2024 | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| [10] | 2024 | ✓ | ✓ | ✓ | |||||
| [46] | 2024 | ✓ | ✓ | ||||||
| [47] | 2024 | ✓ | ✓ | ✓ | |||||
| [37] | 2024 | ✓ | ✓ | ✓ | |||||
| [17] | 2025 | ✓ | ✓ | ✓ | |||||
| Ours | 2025 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| LLM | Key Features | Applications | |
|---|---|---|---|
| Safety | Security | ||
| Anthropic: Claude, 2023 | Claude 3.5 Sonnet: 175B. Hybrid inference model, closed source, cloud deployment, security and ethical safeguards, long text processing. | Battery health monitoring, collision avoidance path planning, physically secure design, safety training material generation, legal advice and compliance checks. | Authentication system design, communication protocol optimization, cryptographic algorithm co-development, anomaly and intrusion detection, privacy protection plan formulation. |
| OpenAI: GPT, 2018 | GPT-4o: 200B. Strong multimodal ability, closed source, cloud deployment, low hallucination rate, low latency. | Sensor spoofing recognition, collision avoidance path planning, flight control recovery, pilot simulation training, UAV cluster collaborative safety. | Anti-interference strategy optimization, identity recognition and authentication, perception data analysis, secure communication protocol optimization, zero-trust security architecture design. |
| xAI: Grok, 2024 | Grok 1: 314B. Partially closed source, cloud deployment, X-platform access, real-time information updates, large computing power. | Battery health monitoring, compliance checks, environmental awareness, risk assessment, emergency response strategy generation, flight restricted area recognition. | Cryptographic algorithm development, anomaly and intrusion detection, radio spectrum security management, data privacy protection plan formulation, security situation prediction. |
| Google: Gemini, 2023 | Gemini Gemma 3: 27B. Closed source, cloud deployment, native support for multimodal, low hallucination rate, strong inference capability. | Physically secure design, sensor spoofing recognition, collision avoidance path planning, environment perception, risk assessment, pilot simulation training. | Anti-jamming strategy optimization, radio spectrum security management, automatic security vulnerability scanning, encrypted communication simulation testing, security situation prediction. |
| Meta: LLaMA, 2023 | LLaMA 3: 8B/70B/405B. Sparse attention mechanism, open source support, community adaptability, lightweight deployment, flexible customization capabilities. | Physical security design, security training material generation, component failure mode identification, flight path and mission planning, rational resource allocation, maintenance guidance. | Intrusion detection, data verification combined with blockchain, encrypted communication simulation testing, security policy evaluation, zero-trust security architecture design. |
| DeepSeek: DeepSeek, 2025 | DeepSeek-V3: 671B. MoE models, open source, local deployment or via API, low cost and free to use, lightweight deployment. | Sensor spoofing recognition, flight loss recovery, flight parameter optimization, component failure identification, UAV cluster cooperative safety. | Cryptographic algorithms development, digital signature verification, radio spectrum security management, automatic security vulnerability scanning, big data security situation prediction. |
| Alibaba: Qwen, 2023 | Qwen 2.5: 72B. MoE models, open source, local deployment support, multitasking capability, extensive knowledge coverage. | Legal compliance checking, flight parameter optimization, failure mode recognition of components, post-accident safety analysis, safety standard compliance validation. | UAV network security perception, digital signature and authentication, real-time security analysis and response, command fraud detection, edge computing security strategy evaluation. |
| Moonshot: Kimi, 2023 | Kimi k1.5: 200B. Multimodal thinking model, closed source, cloud deployment, long text processing, enhanced content security. | Maintenance guidance, security training material generation, task planning and resource allocation, security audit and log analysis, safety standard compliance validation. | Abnormal behavior detection, automatic security vulnerability scanning, blockchain data validation, real-time security analysis, privacy protection scheme development. |
| Field | Ref. | Contributor | Year | Methods | Main Point |
|---|---|---|---|---|---|
| Physical Safety Design | [96] | State Key Laboratory of Nonferrous Metals and Processes | 2023 | ML | An AdaBoost Regressor-based model predicts Al-Li alloys’ specific modulus and achieves a 4% increase in maximum specific modulus over the dataset, with Alloy 3 exceeding widely-used 2195-T8 by 12.6% while maintaining similar specific strength. |
| [99] | Northwestern Polytechnical University | 2021 | DL | A flutter test signal feature extraction method combining EMD and CNN; achieves 100% accuracy on test datasets with fewer training iterations and lower computational complexity. | |
| [162] | Northwestern Polytechnical University | 2025 | DL | A BPNN-based system identification technology; achieves less error for various wing models, improving design efficiency and safety in the preliminary stage. | |
| [108] | Lawrence Berkeley National Laboratory | 2025 | LLM | A multimodal LLM for materials science; achieves 0.93 accuracy in materials property prediction and 0.09 RMSE in energy above hull tasks. | |
| [107] | Harbin Institute of Technology | 2024 | LLM | A collaborative optimization method combining gradient descent and LLMs for prompt tuning; improves performance in NLP and vision-language tasks over traditional methods. | |
| [106] | University of Alicante | 2024 | LLM | A sensor data retrieval method using LLMs converts data to FAIR-compliant formats and creates word embeddings; achieves 0.90 precision and 0.94 MRR. | |
| Battery Safety Management | [121] | University of California | 2023 | ML | An improved LSTM boosts battery state estimation, and a DDPG-based RL method reduces battery failure rate. |
| [86] | Qatar University | 2023 | DL | A UAV battery management system uses DNN and LSTM for SOC prediction with an MSE of 7.6 and an EV score of 0.98, as well as RF for SOH estimation with 92% accuracy. | |
| [109] | Jilin University | 2024 | DL | TinyML-based neural network models estimate battery SOC, maintain high precision in early stages, and reduce computational load. | |
| [123] | Xiamen University | 2024 | LLM | An LLM-based framework for cross-battery state estimation; attains a 2.17% MAE in zero-shot settings, and surpasses latest domain adaptation methods on some datasets. | |
| [124] | Central South University | 2025 | LLM | An LLM-based EV battery health management method; achieves 0.31 MAE, 0.23 RMSE, and 0.0063 CRPS. | |
| [122] | Purdue University | 2025 | LLM | A Transformer-based LLM framework; identifies early degradation via anomaly detection, reduces MAE to 0.87%, and supports predictive maintenance of EVs. | |
| Sensor Spoofing Detection | [127] | Xidian University | 2022 | ML | A UAV GPS spoofing detection method based on sensor data and ML; achieves a detection rate of 99.69%, outperforming existing methods like JSA in accuracy, precision, recall, and F1 score. |
| [125] | Xidian University | 2023 | ML | A UAV GPS spoofing detection algorithm using signal features and ML; achieves a detection rate of 94.87%, an EER of about 5%, and a detection cycle of only 0.4 s. | |
| [134] | King Abdulaziz University | 2024 | DL | An intrusion detection system (IDS) based on adversarial ML model is proposed to detect UAV GPS spoofing attacks. Through adversarial training, the model achieves an average accuracy of 98%. | |
| [163] | Beirut Arab University | 2025 | DL | A framework combining a genetic algorithm-optimized LSTM network enhances UAV GPS spoofing detection, improves classification accuracy from 86.0% to 99.0%, and improves the F1 score from 83.0% to 99.0%, boosting UAV adaptability and anti-spoofing in dynamic scenarios. | |
| [142] | UC Irvine | 2024 | LLM | A method using LLMs for tabular data anomaly detection converts numerical data to text and fine-tunes end-to-end performance, and improves AUROC by 6.7 and 8.9 with LLaMA and Mistral after fine-tuning. | |
| [141] | Oakland University | 2025 | LLM | An LLM uses a distributed architecture across onboard, edge, and cloud for high precision and efficiency; excels in key metrics while maintaining low memory usage, offering robust network threat defense for UAV operations. | |
| Collision Avoidance and Path Planning | [148] | Carnegie Mellon University | 2024 | ML | A lightweight dynamic obstacle detection and tracking method using RGB-D cameras; integrates detection and feature association tracking, achieves 0.11 m position error and 0.23 m/s velocity error, outperforming benchmarks in dynamic navigation. |
| [152] | University of Illinois | 2024 | DL | NIRRT*, combining point cloud and neural networks, improves path planning efficiency and convergence. | |
| [146] | The University of Hong Kong | 2022 | DL | Gradient-based trajectory planning ensures safety and energy efficiency; achieves 98% success in dynamic obstacle avoidance in simulations and real-world tests. | |
| [13] | Florida Institute of Technology | 2024 | LLM | LEVIOSA leverages LLMs to convert natural language commands into UAV swarm flight paths, where GPT-4o achieves the highest average success rate of 76.0% in generating complex trajectories. | |
| [155] | Wuhan University | 2024 | LLM | A vision-based UAV planning system; explores LLMs to enhance user–UAV interaction; achieves a maximum pedestrian velocity of 1.7 m/s without collisions and a detection success rate of 80% with four pedestrians. | |
| Flight Control | [157] | National Chung Hsing University | 2024 | ML | A PPO with CRM reward mechanism achieves a 71% UAV target traversal rate in simulations and a 52% target-crossing rate in a physical environment. |
| [158] | National Defense Academy of Japan | 2022 | DL | A multitask DL model with CNN achieves over 0.91 accuracy in position prediction and good performance in orientation prediction with fewer errors in real-flight tests. | |
| [164] | Northeastern University | 2024 | ML | A Bayesian RL-based navigation strategy; improves casualty location efficiency and reduces negative entropy. | |
| [161] | Jeonbuk National University | 2024 | LLM | A multimodal framework uses YOLOv11s for real-time accident detection, Moondream2 for scene description, and GPT 4-Turbo for emergency suggestions; achieves 94.7% accuracy, 86.8% recall, and 92.8% mAP@0.5. |
| Physical Safety Design | Battery Safety Management | Sensor Spoofing Detection | Collision Avoidance and Path Planning | Flight Control | |
|---|---|---|---|---|---|
| Lack of Datasets | ✓ | ✓ | ✓ | ✓ | |
| Generalizability Issues | ✓ | ✓ | ✓ | ✓ | ✓ |
| Limited Accuracy | ✓ | ✓ | ✓ | ✓ | |
| Sensitivity to Adversarial Attacks | ✓ | ✓ | |||
| Scalability Issues | ✓ | ✓ | |||
| Low Adaptability | ✓ | ||||
| Lack of Hardware Solution | ✓ | ||||
| Low Interpretability | ✓ | ||||
| Unstandardized and Highly Diverse Data | ✓ | ||||
| Low Optimization Search Efficiency | ✓ | ✓ |
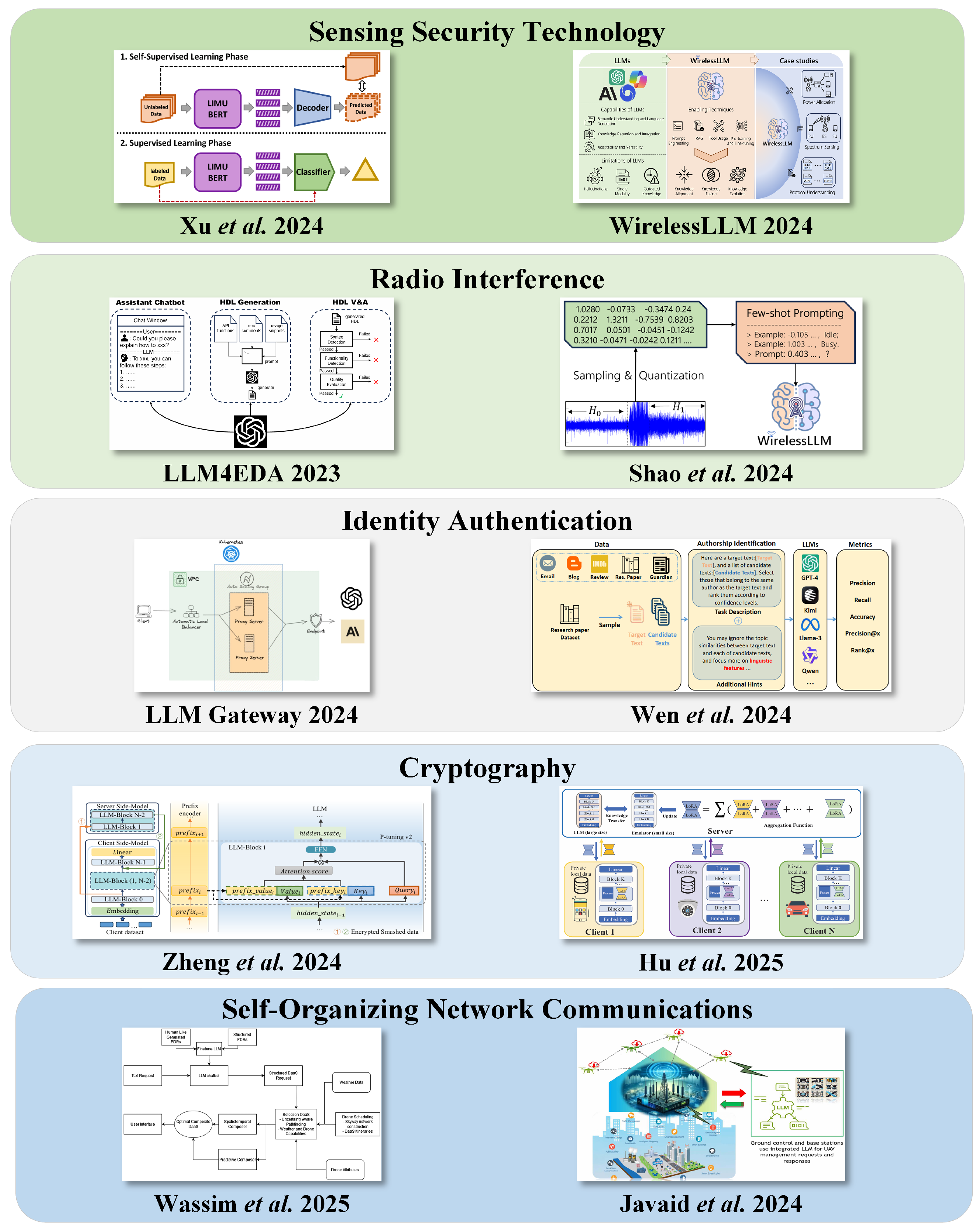
| Field | Ref. | Contributor | Year | Methods | Main Point |
|---|---|---|---|---|---|
| Sensing Security Technology | [195] | Ministry of Natural Resources of China | 2020 | DL | A building recognition method; achieves a recognition accuracy of 93.2% and an average processing time of 74 ms per image. |
| [196] | Toingji University | 2022 | DL | A DL-based ISAC approach; achieves a location accuracy of scatterers at approximately 1 m. | |
| [164] | University of Cambridge | 2023 | ML | A comprehensive survey on ML-assisted UAV operations and communications, covering a wide range of applications and techniques. | |
| [10] | Jeonbuk Tongji University | 2024 | LLM | A comprehensive survey on integrating LLMs with UAVs, achieving enhanced spectral sensing capabilities and improved decision-making efficiency. | |
| Radio Interference | [197] | Space Engineering University | 2022 | ML | A game-theoretic learning anti-jamming approach; achieves enhanced communication reliability, efficient resource utilization, and effective countermeasures against intelligent jammers. |
| [198] | JiLin University | 2024 | ML | A UAV swarm-enabled collaborative secure relay communication strategy; achieves a higher secure sum rate and lower energy consumption. | |
| [199] | University of Electronic Science and Technology of China | 2025 | DL | A RL-based anti-jamming frequency hopping strategy; achieves a higher SINR and faster learning speed compared to those of traditional methods. | |
| [155] | Wuhan University | 2024 | LLM | A vision-based autonomous planning system; achieves a planning cycle of approximately 200 milliseconds. | |
| Dentity Authentication | [175] | Qatar University | 2020 | DL | A UAV detection and identification method; achieves a detection accuracy of 100%, a type identification accuracy of 94.6%, and a state identification accuracy of 87.4%. |
| [176] | Kumoh National Institute of Technology | 2021 | DL | A CNN-based UAV identification algorithm; achieves a detection rate of 94.5%. | |
| [177] | Northwestern Polytechnical University | 2023 | DL | A novel UAV pilot authentication scheme; achieves an authentication accuracy of 95.24% and a malicious hijacking detection accuracy of 96.82%. | |
| [174] | Prince Sattam bin Abdulaziz University | 2024 | ML | A comprehensive review of ML algorithms for UAV detection and classification, covering radar, acoustic, visual, RF, and multisensor systems. | |
| [200] | Northwestern Polytechnical University | 2024 | ML | A multitask learning-based UAV pilot identification and operation evaluation scheme named MTL-PIE; achieves an identification accuracy of 95.36%, an operation evaluation accuracy of 94.47%, and a processing time of only 35 milliseconds. | |
| [10] | Toingji University | 2024 | LLM | A comprehensive review on integrating LLMs with UAVs; supports advanced UAV identity recognition and verification processes. | |
| Cryptography | [182] | Guru Gobind Singh Indraprastha University | 2024 | ML | A UAV data security enhancement framework; achieves a significant reduction in data tampering risks and efficient data validation cycles. |
| [183] | King Abdulaziz University | 2024 | DL | A hybrid DL-based arithmetic optimization algorithm; achieves high accuracy in threat detection and efficient performance in securing communications. | |
| [201] | Beihang Universityy | 2024 | LLM | A federated learning framework for LLMs using encryption and model splitting; achieves secure training with comparable performance to that of centralized models and robust defense against gradient-based attacks. | |
| Self-Organizing Network Communications | [202] | Beijing University of Posts and Telecommunications | 2022 | DL | A topology-aware resilient routing protocol using adaptive Q-learning; achieves a 25.23% lower overhead, a 9.41% higher packet delivery rate (PDR), and a 5.12% lower energy consumption compared to existing methods. |
| [190] | WuHan Maritime Communication Research Institute | 2024 | ML | An optimized AODV-based routing algorithm; achieves a successful packet delivery rate of above 80%. | |
| [9] | JiLin University | 2024 | LLM | A UAV networking security framework using generative AI and DMs; achieves a 25% enhancement in classification accuracy for anomaly detection and robust privacy preservation, with over 10% higher communication rates. | |
| [193] | MSA University | 2024 | LLM | A LLM-DaaS framework; achieves near-perfect accuracy in converting free-text user requests into structured UAV operation tasks, significantly enhancing operational efficiency and adaptability in uncertain environments. |
| Sensing Security Technology | Radio Interference | Identity Authentication | Cryptography | Self-Organizing Network Communications | |
|---|---|---|---|---|---|
| Lack of Datasets | ✓ | ✓ | ✓ | ||
| Generalizability Issues | ✓ | ✓ | ✓ | ✓ | ✓ |
| Limited Accuracy | ✓ | ✓ | ✓ | ||
| Sensitivitiy to Adversarial Attacks | ✓ | ✓ | ✓ | ||
| Lack of Uniform Standards | ✓ | ✓ | ✓ | ||
| Physical and Hardware Limitations | ✓ | ✓ | |||
| Low Interpretability | ✓ | ||||
| Unstandardized and Highly Diverse Data | ✓ | ||||
| Limited Resources | ✓ | ✓ | ✓ | ||
| Cost and Performance Trade-Off | ✓ | ✓ | ✓ | ||
| Lack of Encryption Mechanism | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Zhang, Y.; Zeng, J.; Yang, Y.; Jia, Y.; Song, H.; Lv, T.; Sun, Q.; An, J. AI-Driven Safety and Security for UAVs: From Machine Learning to Large Language Models. Drones 2025, 9, 392. https://doi.org/10.3390/drones9060392
Yang Z, Zhang Y, Zeng J, Yang Y, Jia Y, Song H, Lv T, Sun Q, An J. AI-Driven Safety and Security for UAVs: From Machine Learning to Large Language Models. Drones. 2025; 9(6):392. https://doi.org/10.3390/drones9060392
Chicago/Turabian StyleYang, Zheng, Yuting Zhang, Jie Zeng, Yifan Yang, Yufei Jia, Hua Song, Tiejun Lv, Qian Sun, and Jianping An. 2025. "AI-Driven Safety and Security for UAVs: From Machine Learning to Large Language Models" Drones 9, no. 6: 392. https://doi.org/10.3390/drones9060392
APA StyleYang, Z., Zhang, Y., Zeng, J., Yang, Y., Jia, Y., Song, H., Lv, T., Sun, Q., & An, J. (2025). AI-Driven Safety and Security for UAVs: From Machine Learning to Large Language Models. Drones, 9(6), 392. https://doi.org/10.3390/drones9060392