

Flight Dynamics Modeling and Verification for a Novel Compound Rotorcraft Considering Rotor/Propeller/Fuselage Aerodynamic Interference

 ,
,  , , , ,
, , , ,
Abstract
1. Introduction
- The incorporation of aerodynamic interference factors has enabled a comprehensive aerodynamic modeling of the various components of the unmanned compound rotorcraft, including the wing, fuselage, and both the horizontal and vertical tails. Building upon this modeling process, a nonlinear flight dynamics model has been developed specifically for the sample unmanned compound rotorcraft, which facilitates a deeper understanding of its flight behaviors and performance.
- Based on the MSM, simulations of the flow fields for both the rotor and propeller have been conducted, and the isolated rotor case has been verified in hover. Subsequently, considering the characteristics of the unmanned compound rotorcraft model, a combination of unstructured and structured mesh suitable for interference flow field calculations of unmanned compound rotorcraft are proposed. Additionally, a detailed calculation and analysis of the aerodynamic interactions among the rotor, propeller, and fuselage of the unmanned compound rotorcraft are undertaken.
- The nonlinear model of the unmanned compound rotorcraft is trimmed in simulations, and the outcomes are analyzed alongside data from the wind tunnel tests to validate the reliability of the revised flight dynamics model.
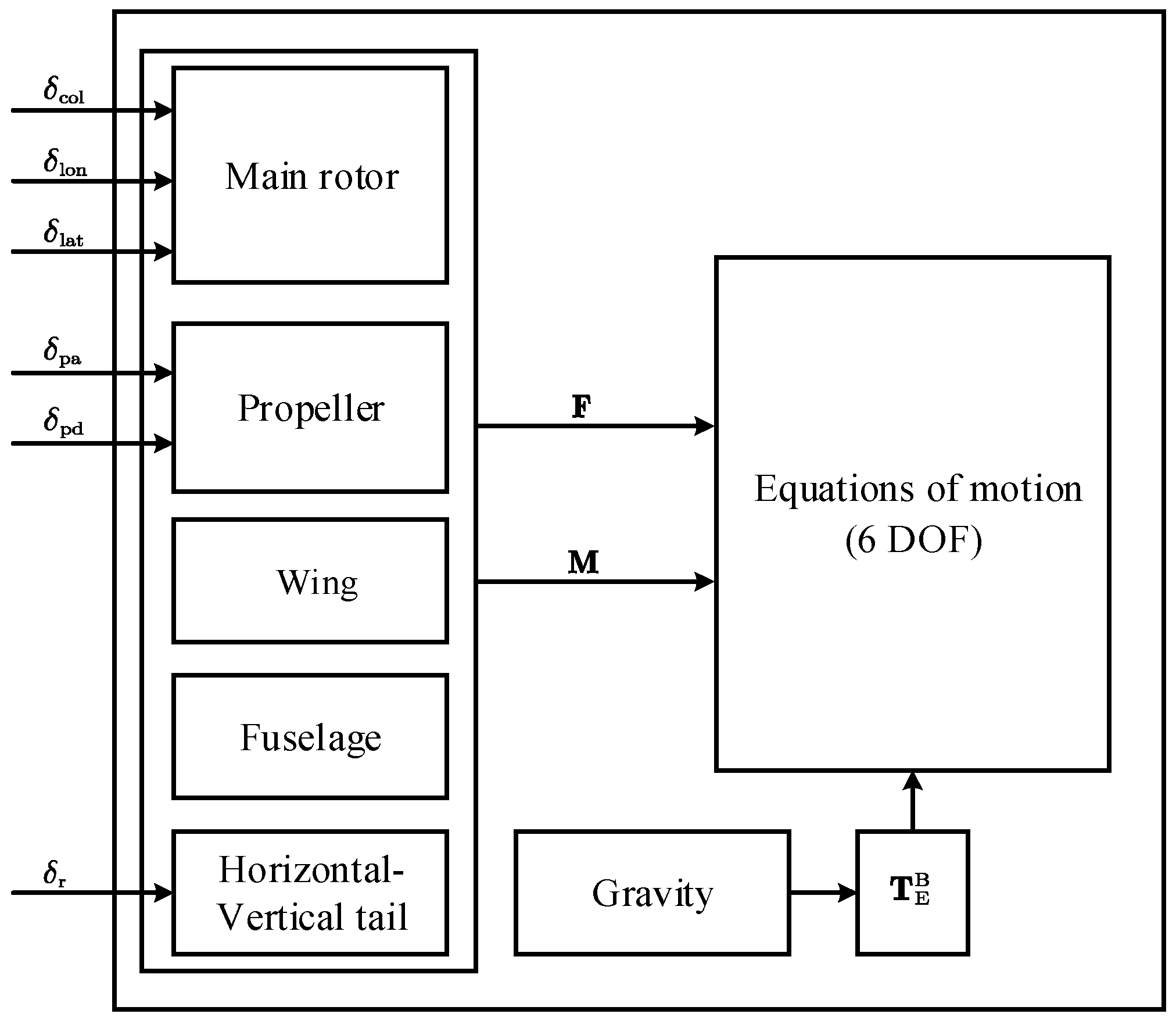
2. Flight Dynamics Model of the Unmanned Compound Rotorcraft
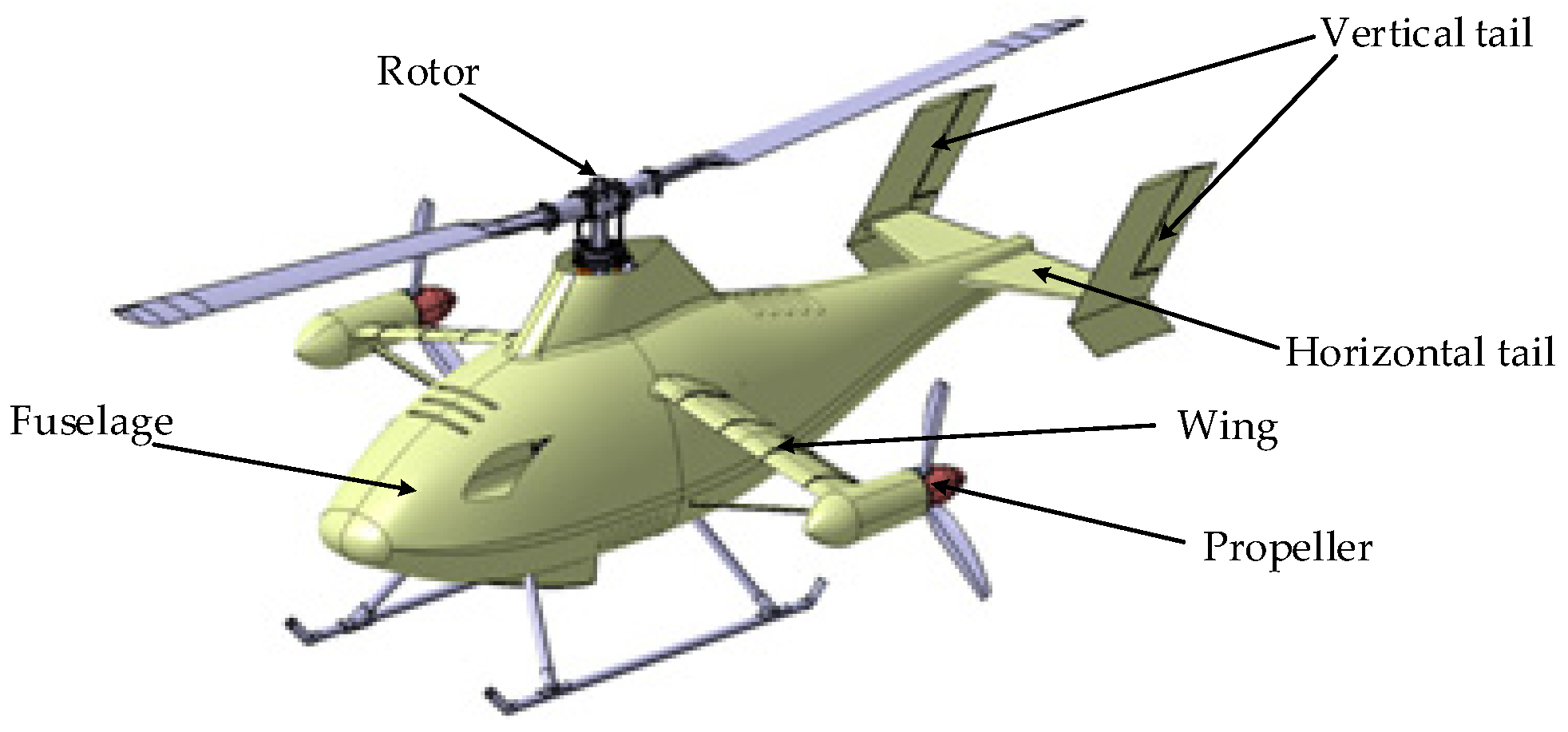
2.1. Overview of the Sample Unmanned Compound Rotorcraft
2.2. Kinematic Equations
- The ground coordinate system is considered to be an inertial reference system;
- The gyroscopic effect caused by rotating components is neglected;
- The longitudinal and lateral coupling effects are ignored;
- The flapping motion of the propellers is neglected.
2.3. Aerodynamic Models of Each Component
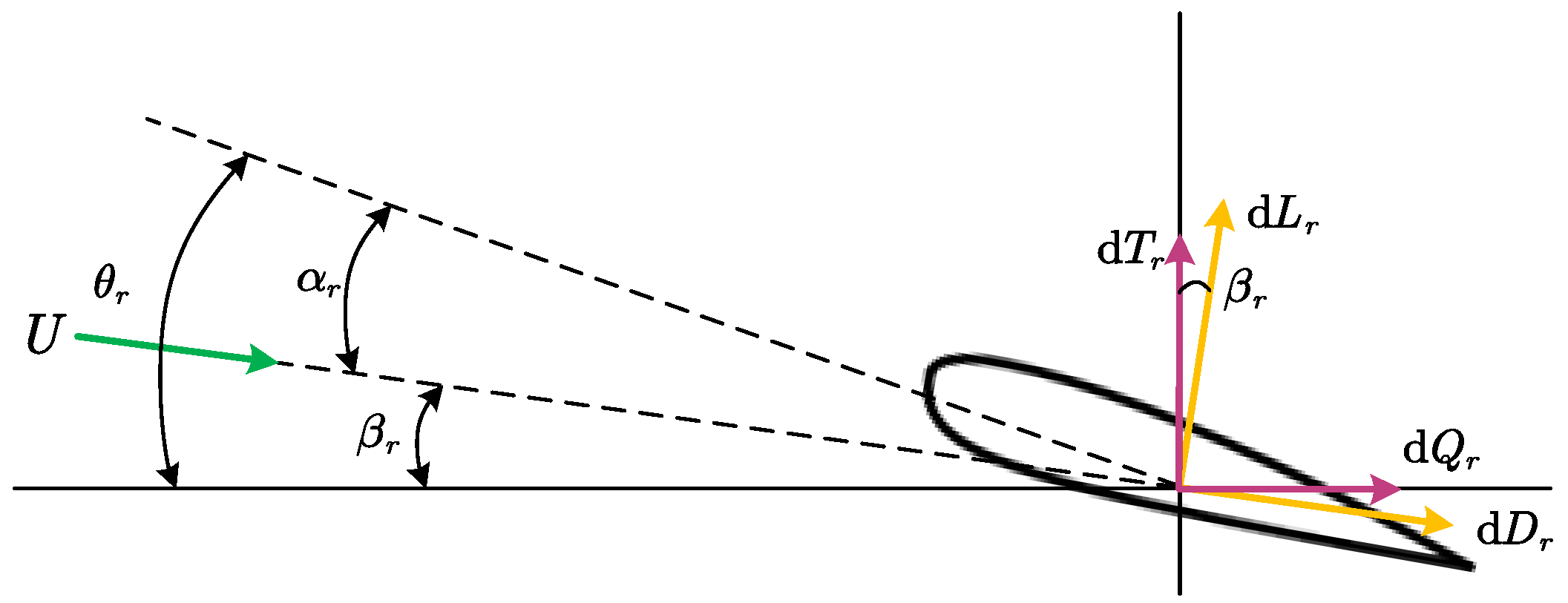
2.3.1. Rotor Aerodynamic Model
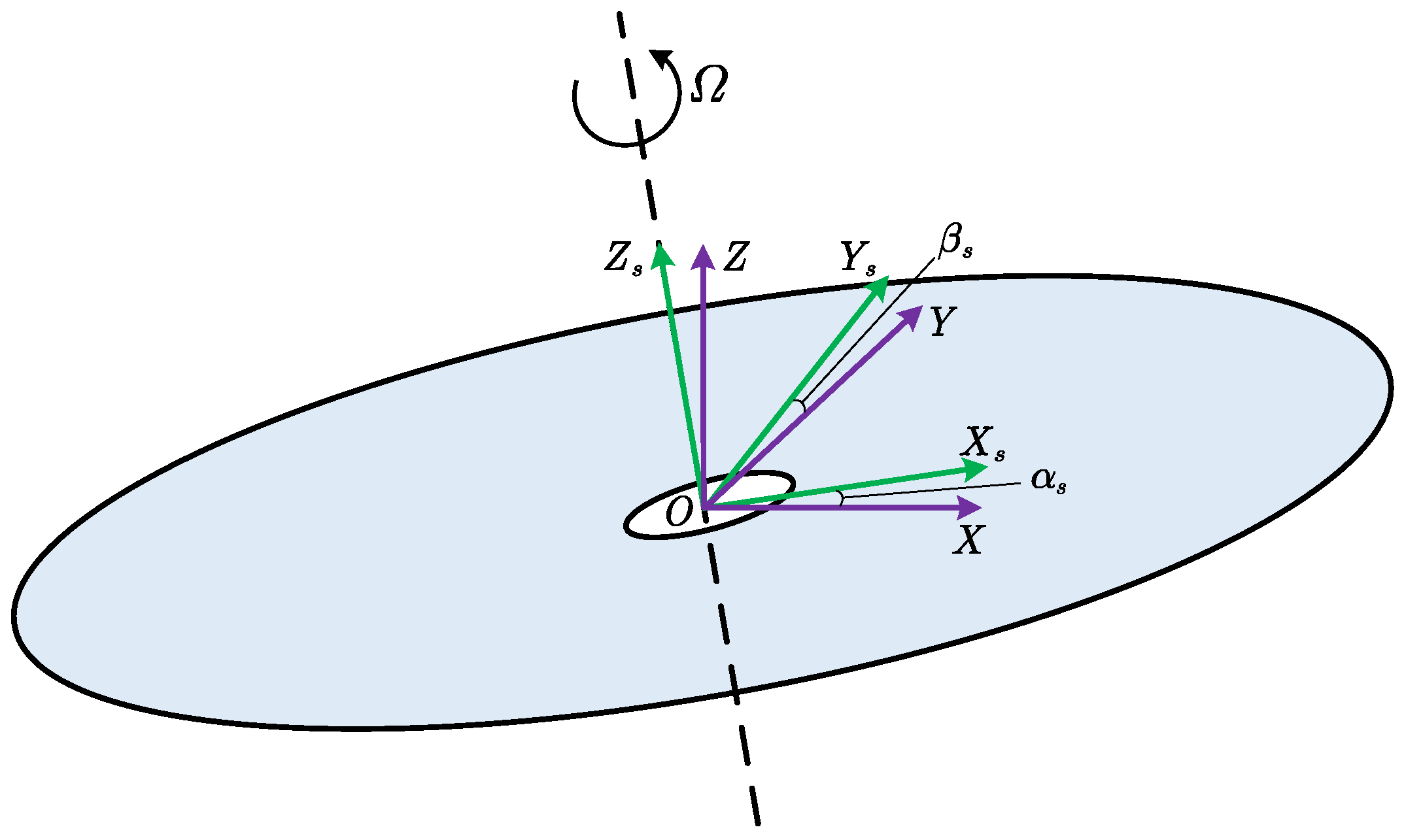
2.3.2. Propeller Aerodynamic Model
2.3.3. Aerodynamic Models of the Wing, Fuselage, and Horizontal–Vertical Tail
3. Calculation Method and Validation
3.1. Introduction to the MSM
3.1.1. Governing Equation
3.1.2. Rotor Momentum Source Model
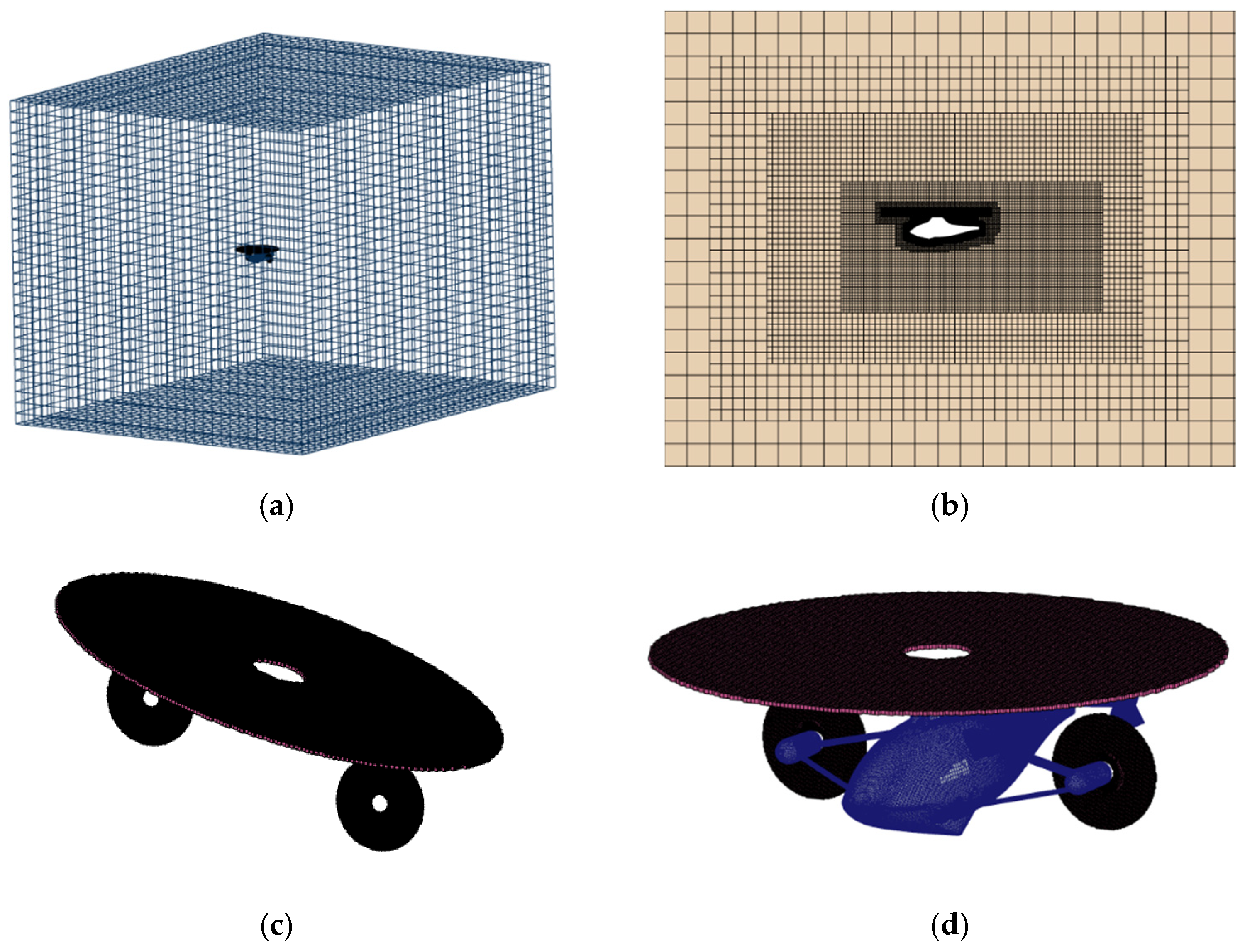
3.2. Mesh Generation
3.3. Validation of the Calculation Method
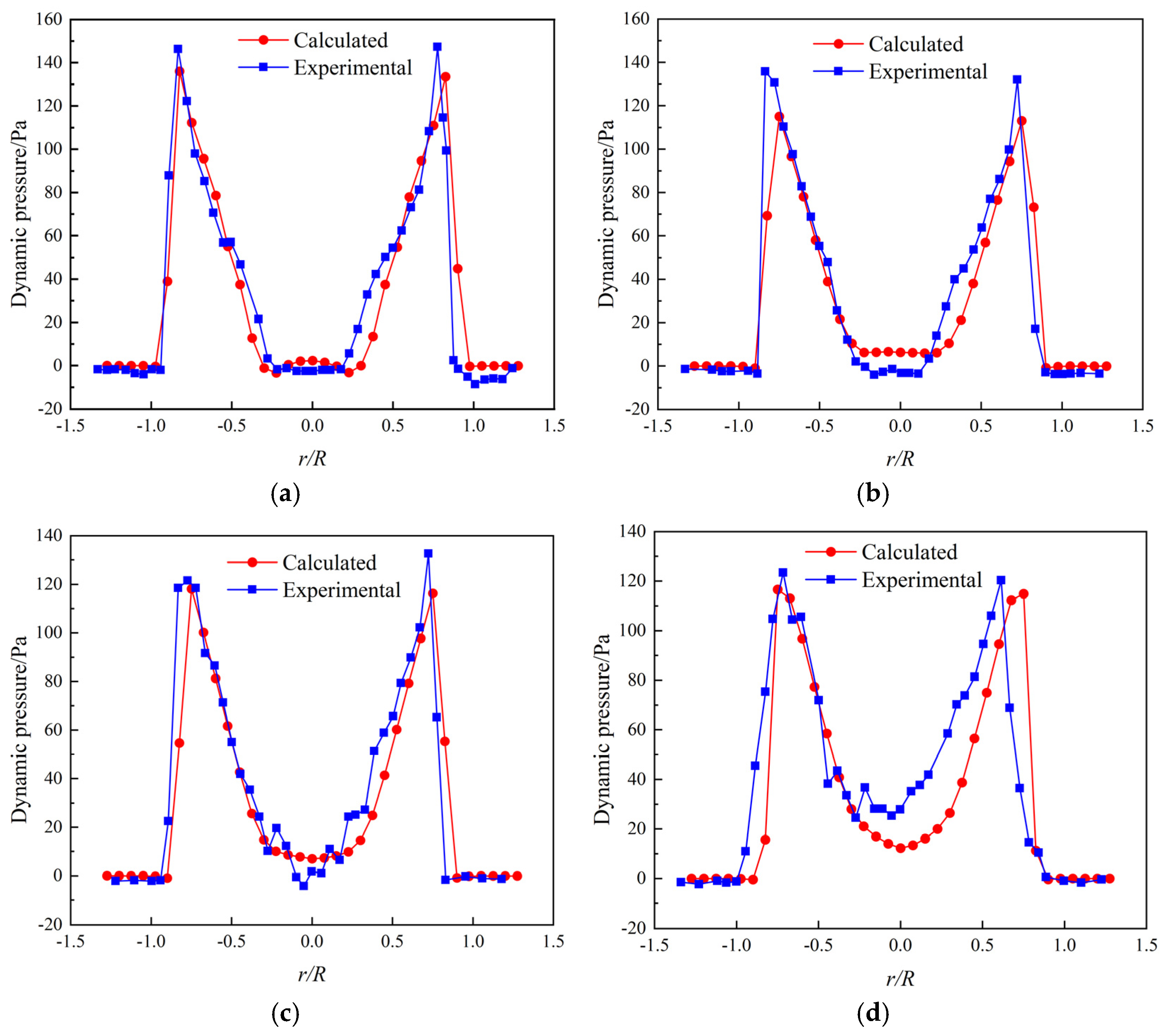
3.3.1. Isolated Rotor Calculation Verification
3.3.2. Rotor/Fuselage Interference Calculation Verification
4. Aerodynamic Interference Analysis of the Rotor/Propeller/Fuselage in Forward Flight
4.1. Rotor/Propeller Slipstream Analysis
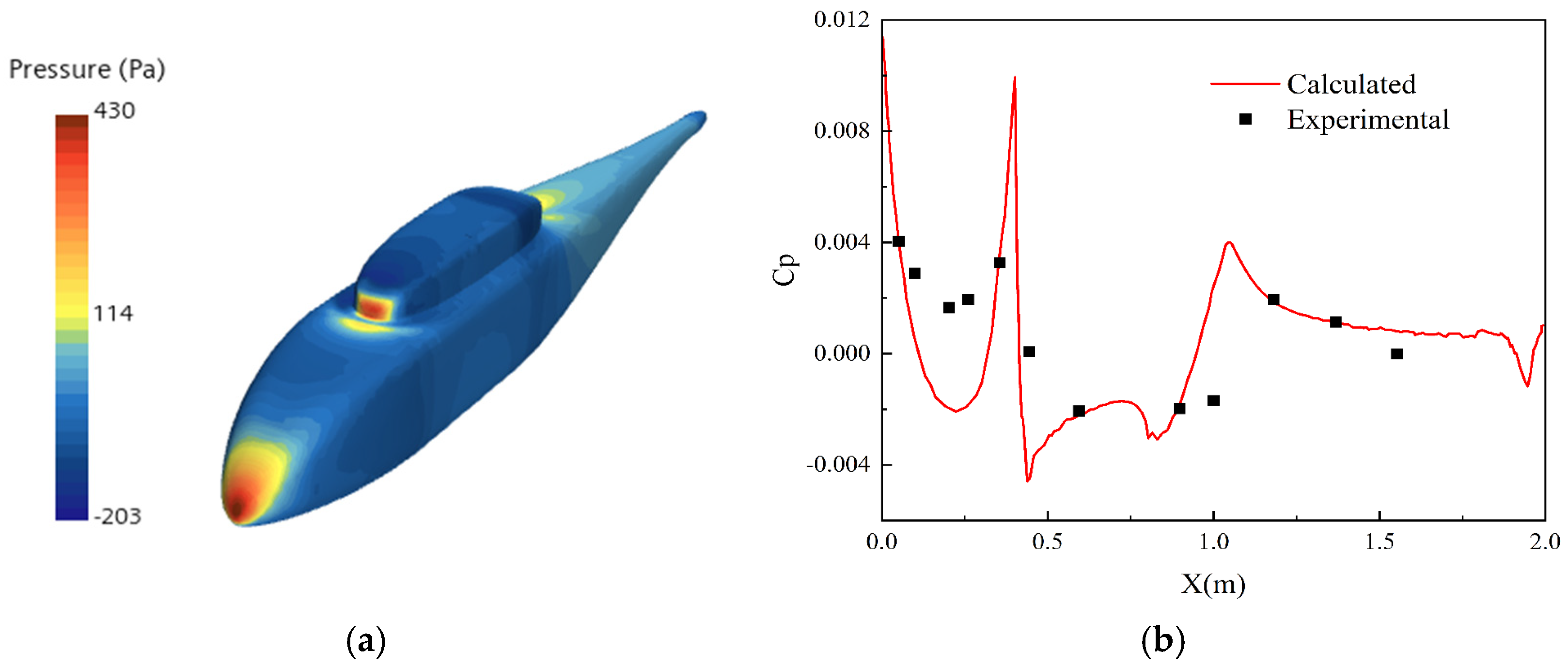
4.2. Pressure Distribution
4.3. Update of Aerodynamic Models
5. Model Validation
6. Conclusions
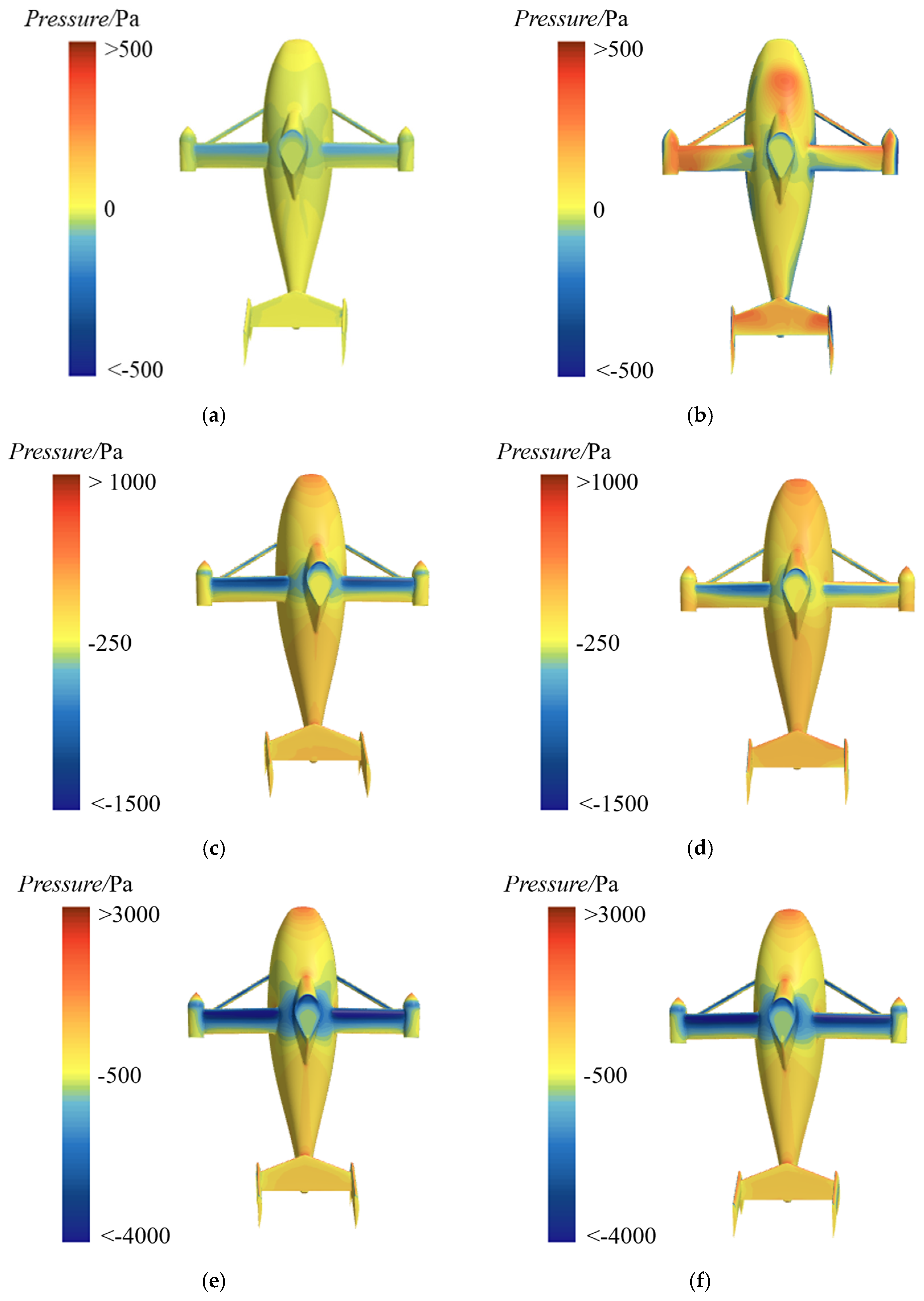
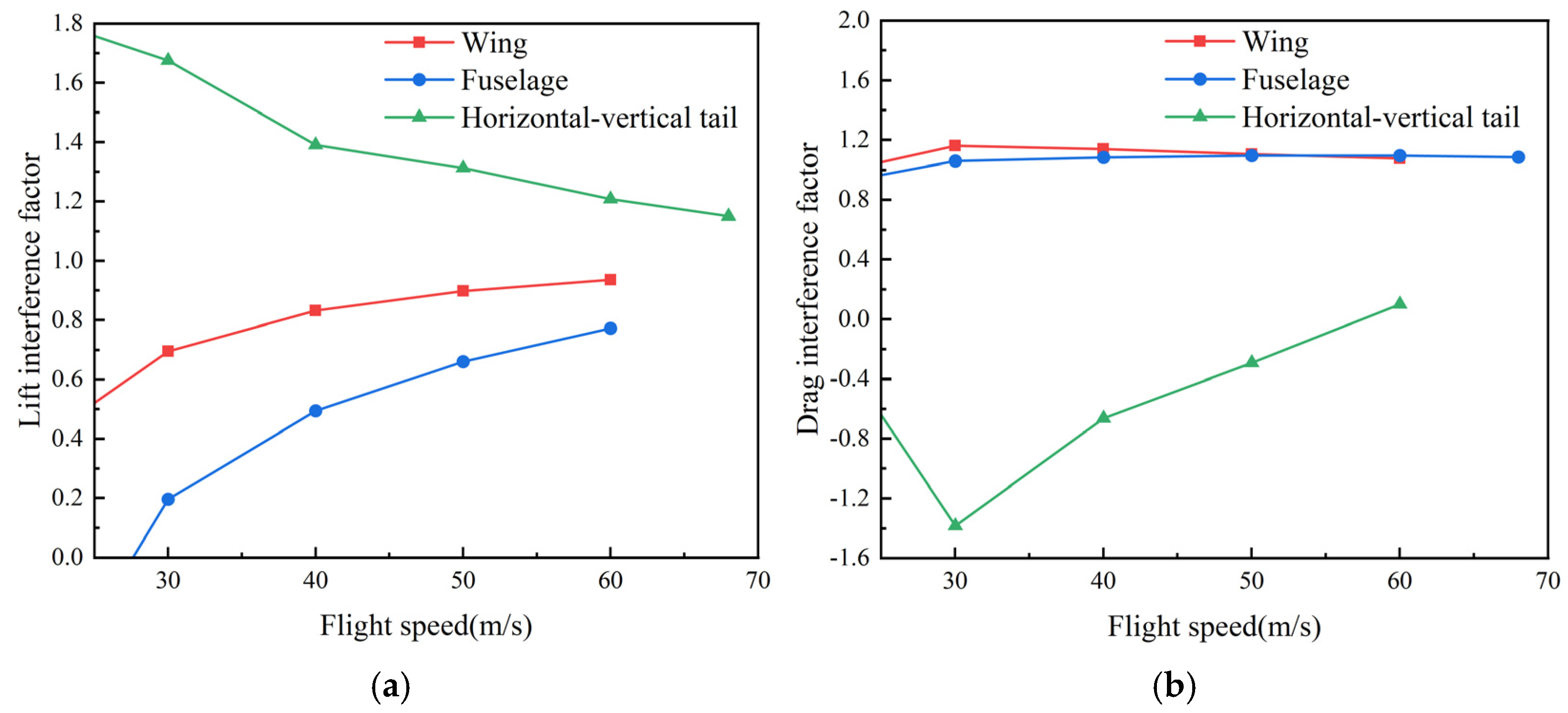
- The MSM is utilized to analyze the aerodynamic interference of the unmanned compound rotorcraft. It has been observed that the downwash from the rotor has a considerable impact on the aerodynamic properties of the wing, fuselage, and horizontal–vertical tail. During low-speed forward flight (with speeds less than 20 m/s), the influence of the rotor and propeller on these components increases significantly. When the flight speed increases, the rotor downwash becomes more horizontal, leading to a gradual reduction in aerodynamic interference among these components. This phenomenon is consistently reflected in the surface pressure distribution of the wing and fuselage, as well as the trends in aerodynamic interference factors.
- The aerodynamic interference factors obtained from CFD calculations show that the impact of the rotor and propellers on the wing, fuselage, and vertical tail varies considerably with changes in flight speed. Specifically, when the flight speed increases, the interference effects exerted by the rotor and propellers on the lift of these components gradually diminish. However, the influence on drag is not consistent. With a rise in forward flight speed, the interference effects on the horizontal–vertical tail become more pronounced, whereas those on the wing and fuselage remain relatively minor.
- The numerical simulation results for the updated flight dynamics model, including rotor thrust, propeller thrust, total lift, and control inputs for the rotor and propeller at different forward flight speeds demonstrate excellent consistency with the wind tunnel test results. This validates the precision and dependability of the updated flight dynamics model.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yan, X.; Lou, B.; Xie, A.; Chen, L.; Zhang, D. A review of advanced high-speed rotorcraft. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1102, 012006. [Google Scholar] [CrossRef]
- Tanabe, Y.; Sugiura, M.; Kobiki, N.; Sugawara, H. A new concept of compound helicopter and flight tests. In Proceedings of the 2018 Asia-Pacific International Symposium on Aerospace Technology, Chengdu, China, 16–18 October 2018; pp. 1343–1352. [Google Scholar]
- Airbus Racer Speeds Past 400 km/h. Available online: https://www.airbus.com/en/newsroom/press-releases/2024-07-airbus-racer-speeds-past-400-kmh (accessed on 21 June 2024).
- Yang, K.L.; Han, D. Influence of rotor/wing aerodynamic interference on performance of compound helicopters. J. Beijing Univ. Aeronaut. Astronaut. 2023, 49, 1761–1771. [Google Scholar]
- Li, B.; Liang, D.W.; Huang, G.P. Propeller slipstream effects on aerodynamic performance of turbo-prop airplane based on equivalent actuator disk model. Acta Aeronaut. Astronaut. Sin. 2008, 29, 845–852. [Google Scholar]
- Ferguson, K.; Thomson, D. Flight dynamics investigation of compound helicopter configurations. J. Aircr. 2015, 52, 156–167. [Google Scholar] [CrossRef]
- Roche, J. Aerodynamic Trade Study of Compound Helicopter Concepts. Master’s Thesis, Embry-Riddle Aeronautical University, Daytona Beach, FL, USA, 2015. [Google Scholar]
- Wagter, C.; Smeur, E. Control of a hybrid helicopter with wings. Int. J. Micro Air Veh. 2017, 9, 209–217. [Google Scholar] [CrossRef]
- Ye, L.; Zhang, Y.; Yang, S.; Zhu, X.; Dong, J. Numerical simulation of aerodynamic interaction for a tilt rotor aircraft in helicopter mode. Chin. J. Aeronaut. 2016, 29, 843–854. [Google Scholar] [CrossRef]
- Colli, A.; Zanotti, A.; Gibertini, G. Wind-tunnel experimental investigation on rotor-rotor aerodynamic interaction in compound helicopter configuration. Aerosp. Sci. Technol. 2024, 153, 109420. [Google Scholar] [CrossRef]
- Frey, F.; Thiemeier, J.; Öhrle, C.; Keßler, M.; Krämer, E. Aerodynamic interactions on airbus helicopters’ compound helicopter RACER in hover. J. Am. Helicopter Soc. 2022, 67, 1–17. [Google Scholar] [CrossRef]
- Frey, F.; Thiemeier, J.; Öhrle, C.; Keßler, M.; Krämer, E. Aerodynamic interactions on Airbus Helicopters’ compound helicopter RACER in cruise flight. In Proceedings of the Vertical Flight Society 75th Annual Forum, Philadelphia, PA, USA, 13–16 May 2019; pp. 1–19. [Google Scholar]
- Lienard, C.; Salah, I.; Renaud, T. RACER high-speed demonstrator: Rotor and rotor-head wake interactions with tail unit. In Proceedings of the Vertical Flight Society 80th Annual Forum, Montreal, QC, Canada, 7–9 May 2019; pp. 1–13. [Google Scholar]
- Sugawara, H.; Tanabe, Y. Numerical investigation of rotor/wing aerodynamic interactions at high advance ratios. J. Aircr. 2019, 56, 2285–2298. [Google Scholar] [CrossRef]
- Nie, B.; Wang, L.; Huang, Z.; He, L.; Yang, S.; Yan, H.; Zhang, G. Flight dynamics modeling and control scheme design of compound high-speed unmanned helicopters. Acta Aeronaut. Astronaut. Sin. 2024, 45, 129–148. [Google Scholar]
- Lin, L.; Liu, X.; Peng, M.; Li, J. Research on flight dynamic modeling and interference of components for rotor/wing compound helicopter. In Proceedings of the 2018 Asia-Pacific International Symposium on Aerospace Technology, Chengdu, China, 16–18 October 2018; pp. 1202–1221. [Google Scholar]
- Huang, L.Y.; Zhao, X.; Wen, L. Analysis of aerodynamic trim and rotor/propeller/wing interference characteristics for high-speed composite helicopter in hover. In Proceedings of the 2023 Asia-Pacific International Symposium on Aerospace Technology, Lingshui, China, 16–17 October 2023; pp. 375–393. [Google Scholar]
- Kong, H.W. Research on Some Key Technical Issues of Compound High Speed Helicopter. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2011. [Google Scholar]
- Xu, D.X.; Yang, S.P.; He, L. Investigation on propeller aerodynamic characteristics of compound high-speed helicopter. Helicopter Tech. 2024, 222, 4–9. [Google Scholar]
- Lu, K.; Liu, C.; Li, C.; Chen, R. Flight dynamics modeling and dynamic stability analysis of tilt-rotor aircraft. Int. J. Aerosp. Eng. 2019, 2019, 5737212. [Google Scholar] [CrossRef]
- Gavrilets, V.; Martinos, I.; Mettler, B.; Feron, E. Control logic for automated aerobatic flight of a miniature helicopter. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Mettler, B. Identification Modeling and Characteristics of Miniature Rotorcraft, 2nd ed.; Springer: Boston, MA, USA, 2003. [Google Scholar]
- Pitt, D.M.; Peters, D.A. Theoretical prediction of dynamic-inflow derivatives. In Proceedings of the 6th European Rotorcraft and Powered Lift Aircraft Forum, Bristol, UK, 16–19 September 1980. [Google Scholar]
- Gaonkar, G.H.; Peters, D.A. Review of dynamic inflow modeling for rotorcraft flight dynamics. In Proceedings of the 27th Structures, Structural Dynamics and Materials Conference, San Antonio, TX, USA, 19–21 May 1986. [Google Scholar]
- Yin, X.; An, H.; Jia, S.; Ma, H.; Wang, C.; Wang, L.; Nie, B. Modeling and attitude disturbance rejection control of a compound high-speed helicopter with a new configuration. Int. J. Aeronaut. Space Sci. 2024. [Google Scholar] [CrossRef]
- Liu, C.F.; Zhu, Q.H.; Liu, J. Aerodynamic effect analysis of rotor downwash on wings of composite high-speed helicopter. Adv. Aeronaut. Sci. Eng. 2023, 14, 38–46. [Google Scholar]
- Zhao, Y.Y.; Li, X.; Shi, Y.J. Analysis on rotor-propellers interaction flowfield for compound double-thust-propeller high-speed helicopters. J. Nanjing Univ. Aeronaut. Astronaut. 2017, 49, 154–164. [Google Scholar]
- Fan, F.; Lin, Y.F.; Huang, S.L. Numerical simulation on rotor/fuselage unsteady interaction flowfield based on hybrid grid. J. Nanjing Univ. Aeronaut. Astronaut. 2015, 47, 180–188. [Google Scholar]
- Wang, X.Q.; Jiang, L.S.; Sun, H.X. Computational investigation of the dual-thrust compound high-speed helicopter aerodynamic interactions in hover. Helicopter Tech. 2024, 222, 15–21. [Google Scholar]
- Rajagopalan, R.G.; Baskaran, V.; Hollingsworth, A.; Lestarit, A.; Garrick, D.; Solis, E.; Hagerty, B. RotCFD—A tool for aerodynamic interference of rotors: Validation and capabilities. In Proceedings of the American Helicopter Society Future Vertical Lift Aircraft Design Conference, San Francisco, CA, USA, 18–20 January 2012. [Google Scholar]
- Koning, W.J.F.; Acree, C.W.; Rajagopalan, G. Using RotCFD to predict isolated XV-15 rotor performance. In Proceedings of the AHS Technical Meeting on Aeromechanics Design for Vertical Lift, San Francisco, CA, USA, 20–22 January 2016. [Google Scholar]
- Shen, J.; Fan, S.B.; Ji, Y.X. Aerodynamics analysis of a hypersonic electromagnetic gun launched projectile. Defence Technol. 2020, 16, 753–761. [Google Scholar] [CrossRef]
- Shen, S.Y.; Zhu, Q.H.; Zhu, Z.H.; Zhu, Q.-Y.; Duan, J. Analysis of rotor/propeller/fuselage interaction characteristics of high-speed helicopter. Adv. Aeronaut. Sci. Eng. 2020, 11, 46–55. [Google Scholar]
- Steijl, R.; Barakos, G. Sliding mesh algorithm for CFD analysis of helicopter rotor-fuselage aerodynamics. Int. J. Numer. Meth. Fluids 2008, 58, 527–549. [Google Scholar] [CrossRef]
- Stokkermans, T.; Veldhuis, L.; Soemarwoto, B.; Fukari, R.; Eglin, P. Breakdown of aerodynamic interactions for the lateral rotors on a compound helicopter. Aerosp. Sci. Technol. 2020, 101, 105845. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Number of rotor blades | 2 | - |
| Rotor radius | 0.914 | m |
| Rotor speed | 122.2 | rad/s |
| Airfoil | NACA0012 | - |
| Chord length | 0.1 | m |
| Root cut | 0 | m |
| Twist | 0 | ° |
| Collective pitch | 11 | ° |
| Parameter | Value | Unit |
|---|---|---|
| Number of rotor blades | 4 | - |
| Rotor radius | 0.86 | m |
| Rotor speed | 209.4 | rad/s |
| Airfoil | NACA0012 | - |
| Chord length | 0.066 | m |
| Twist | −8 | ° |
| Disk solidity | NACA0012 | - |
| Tip speed | 180 | m/s |
| Rotor/fuselage spacing | 0.083 | m |
| Fuselage length | 2 | m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, X.; Nie, B.; Wang, C.; An, H.; Jia, S.; Ma, H.; Deng, H.; He, L. Flight Dynamics Modeling and Verification for a Novel Compound Rotorcraft Considering Rotor/Propeller/Fuselage Aerodynamic Interference. Drones 2025, 9, 329. https://doi.org/10.3390/drones9050329
Yin X, Nie B, Wang C, An H, Jia S, Ma H, Deng H, He L. Flight Dynamics Modeling and Verification for a Novel Compound Rotorcraft Considering Rotor/Propeller/Fuselage Aerodynamic Interference. Drones. 2025; 9(5):329. https://doi.org/10.3390/drones9050329
Chicago/Turabian StyleYin, Xinfan, Bowen Nie, Chang Wang, Honglei An, Shengde Jia, Hongxu Ma, Haoxuan Deng, and Long He. 2025. "Flight Dynamics Modeling and Verification for a Novel Compound Rotorcraft Considering Rotor/Propeller/Fuselage Aerodynamic Interference" Drones 9, no. 5: 329. https://doi.org/10.3390/drones9050329
APA StyleYin, X., Nie, B., Wang, C., An, H., Jia, S., Ma, H., Deng, H., & He, L. (2025). Flight Dynamics Modeling and Verification for a Novel Compound Rotorcraft Considering Rotor/Propeller/Fuselage Aerodynamic Interference. Drones, 9(5), 329. https://doi.org/10.3390/drones9050329