
A Multi-Timescale Method for State of Charge Estimation for Lithium-Ion Batteries in Electric UAVs Based on Battery Model and Data-Driven Fusion

Abstract
1. Introduction
2. Multi-Timescale Method
2.1. Architecture of the Method
2.2. Battery Model
2.3. SOC Estimation Based on the MI-AEKF
| Algorithm 1 The algorithmic procedure of MI-AEKF for SOC estimation |
|
2.4. Data-Driven Model for SOC Error Correction
2.4.1. Structure of the BiTCN
2.4.2. Structure of the BiGRU
2.4.3. Attention Mechanism
3. SOC Estimation Discription
3.1. Battery Dataset
3.2. Parameter Identification and Setting
3.3. Performance Index
4. Results and Discussion
4.1. Estimation Results Using MI-AEKF
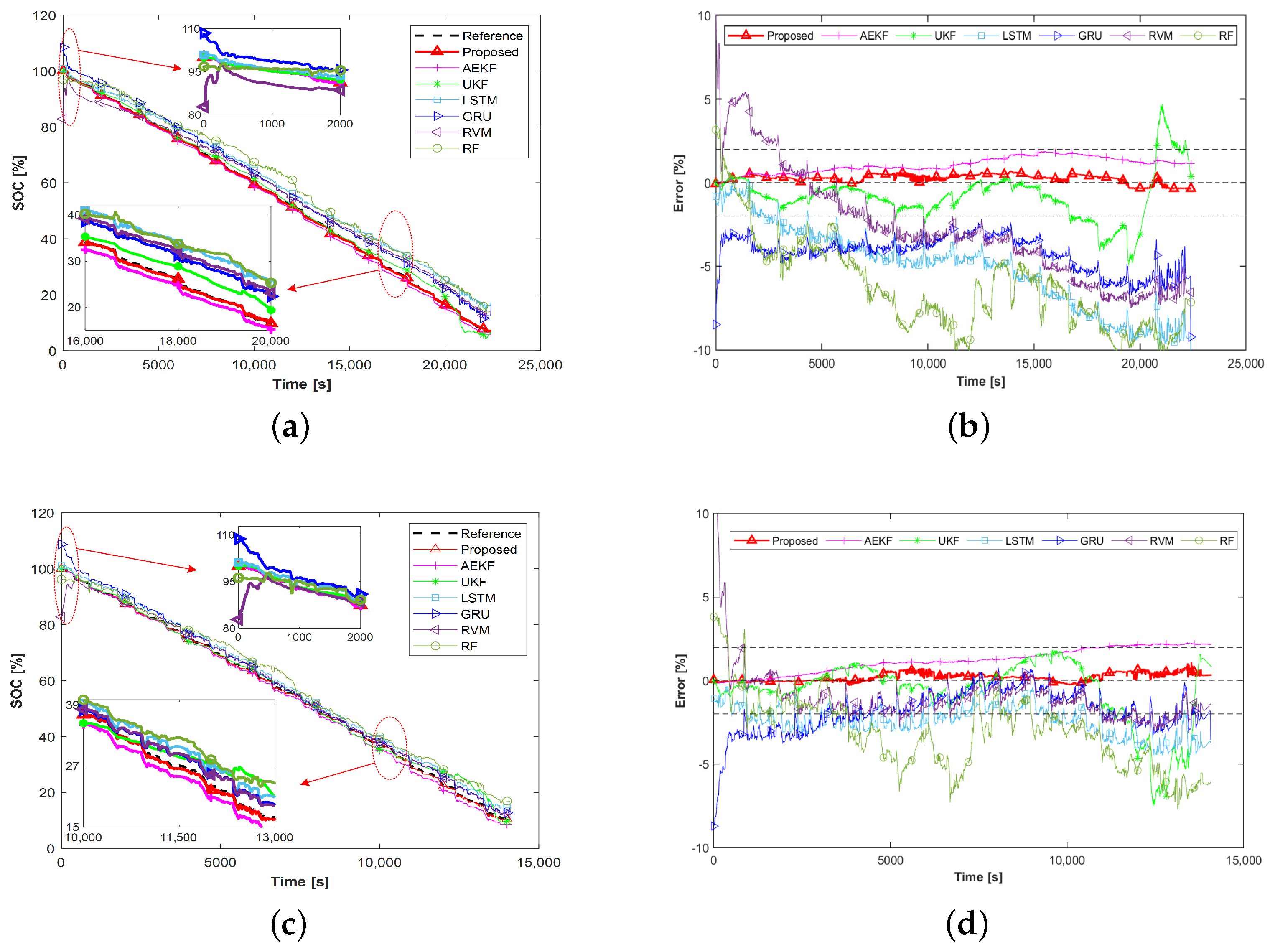
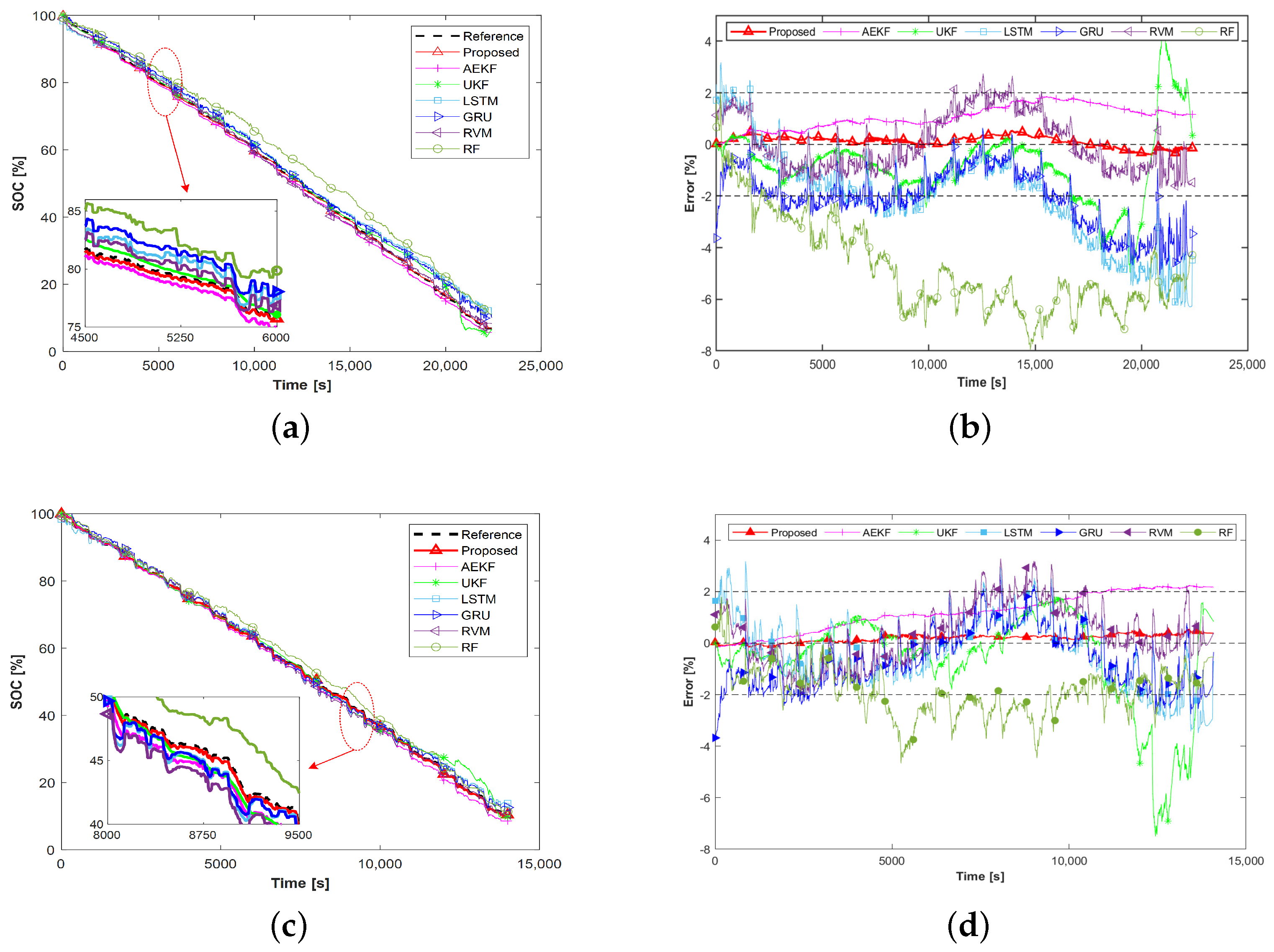
4.2. Comparison of Different Data-Driven Models on SOC Error Correction
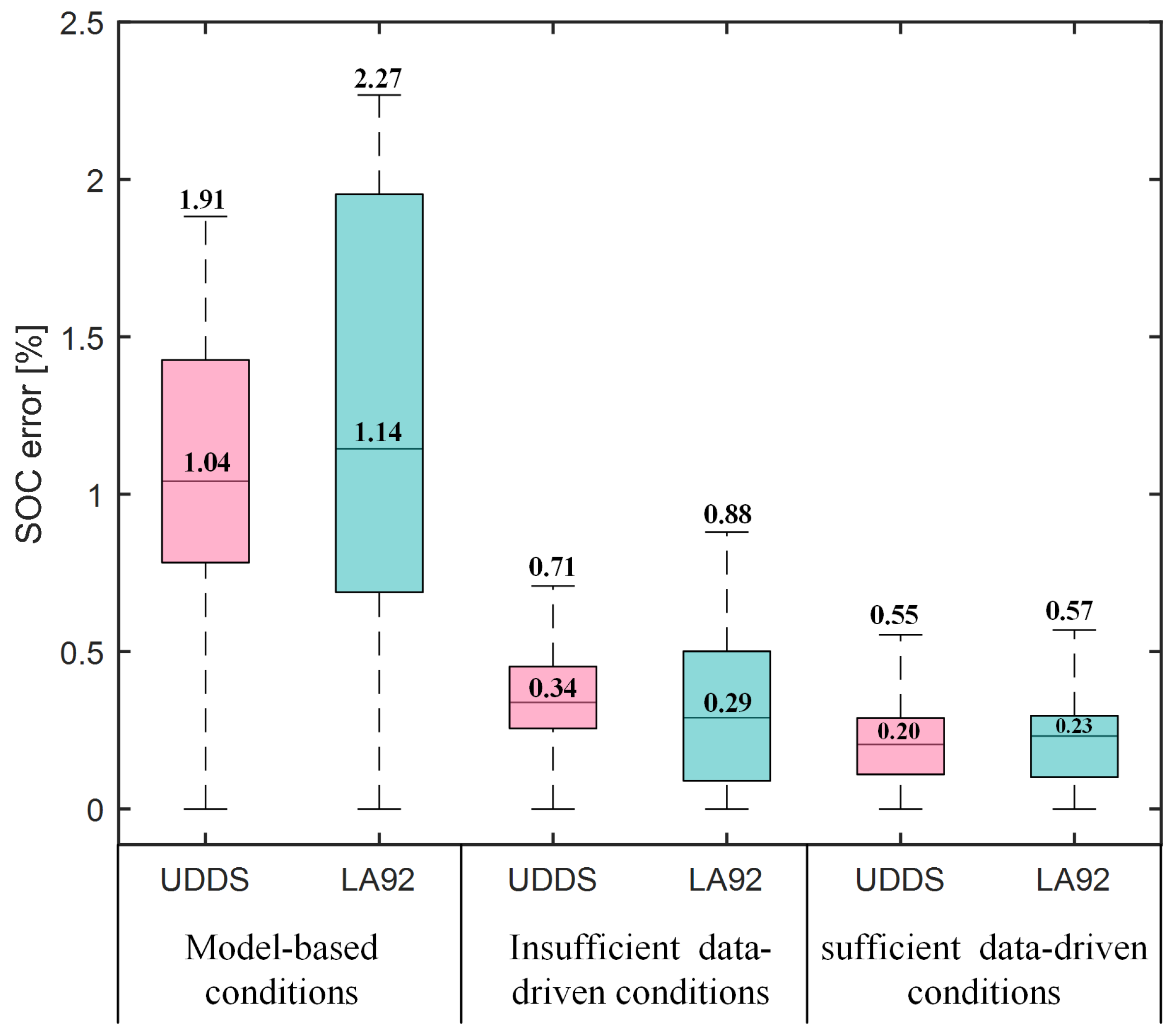
4.3. SOC Estimation Using Fusion Model
4.4. Performance Different Temperature Conditions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cheng, W.; Yi, Z.; Liang, J.; Song, Y.; Liu, D. An SOC and SOP joint estimation method of lithium-ion batteries in unmanned aerial vehicles. In Proceedings of the 2020 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence (ICSMD), Xi’an, China, 15–17 October 2020; pp. 247–252. [Google Scholar]
- Shuaibu, A.S.; Mahmoud, A.S.; Sheltami, T.R. A Review of Last-Mile Delivery Optimization: Strategies, Technologies, Drone Integration, and Future Trends. Drones 2025, 9, 158. [Google Scholar] [CrossRef]
- Monirul, I.M.; Qiu, L.; Ruby, R. Accurate state of charge estimation for UAV-centric lithium-ion batteries using customized unscented Kalman filter. J. Energy Storage 2025, 107, 114955. [Google Scholar] [CrossRef]
- Tian, W.; Liu, L.; Zhang, X.; Shao, J. Flight trajectory and energy management coupled optimization for hybrid electric UAVs with adaptive sequential convex programming method. Appl. Energy 2024, 364, 123166. [Google Scholar] [CrossRef]
- Uhm, T.; Kim, S. State-of-charge estimation for remaining flying time prediction of small UAV using adaptive robust extended Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2024, 61, 959–977. [Google Scholar] [CrossRef]
- Shibl, M.M.; Ismail, L.S.; Massoud, A.M. A machine learning-based battery management system for state-of-charge prediction and state-of-health estimation for unmanned aerial vehicles. J. Energy Storage 2023, 66, 107380. [Google Scholar] [CrossRef]
- Piller, S.; Perrin, M.; Jossen, A. Methods for state-of-charge determination and their applications. J. Power Sources 2001, 96, 113–120. [Google Scholar] [CrossRef]
- Chen, B.; Jiang, H.; Chen, X.; Li, H. Robust state-of-charge estimation for lithium-ion batteries based on an improved gas-liquid dynamics model. Energy 2022, 238, 122008. [Google Scholar] [CrossRef]
- Yang, N.; Zhang, X.; Li, G. State of charge estimation for pulse discharge of a LiFePO4 battery by a revised Ah counting. Electrochim. Acta 2015, 151, 63–71. [Google Scholar] [CrossRef]
- Sun, L.; Li, G.; You, F. Combined internal resistance and state-of-charge estimation of lithium-ion battery based on extended state observer. Renew. Sustain. Energy Rev. 2020, 131, 109994. [Google Scholar] [CrossRef]
- Petzl, M.; Danzer, M.A. Advancements in OCV measurement and analysis for lithium-ion batteries. IEEE Trans. Energy Convers. 2013, 28, 675–681. [Google Scholar] [CrossRef]
- Zhou, W.; Zheng, Y.; Pan, Z.; Lu, Q. Review on the battery model and SOC estimation method. Processes 2021, 9, 1685. [Google Scholar] [CrossRef]
- Li, H.; Zhang, W.; Yang, X.; Jiang, H.; Wang, Y.; Yang, T.; Chen, L.; Shen, H. State of charge estimation for lithium-ion battery using an electrochemical model based on electrical double layer effect. Electrochim. Acta 2019, 326, 134966. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, J.; Lund, P.D.; Zhang, Y. Co-estimating the state of charge and health of lithium batteries through combining a minimalist electrochemical model and an equivalent circuit model. Energy 2022, 240, 122815. [Google Scholar] [CrossRef]
- Lai, X.; Wang, S.; Ma, S.; Xie, J.; Zheng, Y. Parameter sensitivity analysis and simplification of equivalent circuit model for the state of charge of lithium-ion batteries. Electrochim. Acta 2020, 330, 135239. [Google Scholar] [CrossRef]
- Kuipers, M.; Schröer, P.; Nemeth, T.; Zappen, H.; Blömeke, A.; Sauer, D.U. An algorithm for an online electrochemical impedance spectroscopy and battery parameter estimation: Development, verification and validation. J. Energy Storage 2020, 30, 101517. [Google Scholar] [CrossRef]
- Zhao, X.; Sun, B.; Zhang, W.; He, X.; Ma, S.; Zhang, J.; Liu, X. Error theory study on EKF-based SOC and effective error estimation strategy for Li-ion batteries. Appl. Energy 2024, 353, 121992. [Google Scholar] [CrossRef]
- Zhu, C.; Wang, S.; Yu, C.; Zhou, H.; Fernandez, C.; Guerrero, J.M. An improved Cauchy robust correction-sage Husa extended Kalman filtering algorithm for high-precision SOC estimation of Lithium-ion batteries in new energy vehicles. J. Energy Storage 2024, 88, 111552. [Google Scholar] [CrossRef]
- Lv, H.; Liao, Y.; Zhao, C.; Shang, X.; Zhang, F. State of charge estimation of lithium-titanate battery based on multi-model extended Kalman filter considering temperature and current rate. J. Energy Storage 2024, 77, 109890. [Google Scholar] [CrossRef]
- Wang, J.; Song, J.; Li, Y.; Ren, T.; Yang, Z. State of charge estimation for lithium-ion battery based on improved online parameters identification and adaptive square root unscented Kalman filter. J. Energy Storage 2024, 77, 109977. [Google Scholar] [CrossRef]
- Hosseininasab, S.; Momtaheni, N.; Pischinger, S.; Günther, M.; Bauer, L. State-of-charge estimation of Lithium-ion batteries using an adaptive dual unscented Kalman filter based on a reduced-order model. J. Energy Storage 2023, 73, 109011. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, H.; Shu, X.; Zhang, Y.; Shen, J.; Liu, Y. Synthetic state of charge estimation for lithium-ion batteries based on long short-term memory network modeling and adaptive H-Infinity filter. Energy 2021, 228, 120630. [Google Scholar] [CrossRef]
- Ning, Z.; Deng, Z.; Li, J.; Liu, H.; Guo, W. Co-estimation of state of charge and state of health for 48 v battery system based on cubature kalman filter and h-infinity. J. Energy Storage 2022, 56, 106052. [Google Scholar] [CrossRef]
- He, L.; Hu, X.; Yin, G.; Shao, X.; Liu, J.; Shi, Q. A voltage dynamics model of lithium-ion battery for state-of-charge estimation by proportional-integral observer. Appl. Energy 2023, 351, 121793. [Google Scholar] [CrossRef]
- He, L.; Hu, X.; Yin, G.; Wang, G.; Shao, X.; Liu, J. A current dynamics model and proportional–integral observer for state-of-charge estimation of lithium-ion battery. Energy 2024, 288, 129701. [Google Scholar] [CrossRef]
- Lai, X.; Huang, Y.; Han, X.; Gu, H.; Zheng, Y. A novel method for state of energy estimation of lithium-ion batteries using particle filter and extended Kalman filter. J. Energy Storage 2021, 43, 103269. [Google Scholar] [CrossRef]
- Geng, Y.; Pang, H.; Liu, X. State-of-charge estimation for lithium-ion battery based on PNGV model and particle filter algorithm. J. Power Electron. 2022, 22, 1154–1164. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Energy Storage 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, G.; Zhou, M.; Li, G. A comprehensive review of research hotspots on battery management systems for UAVs. IEEE Access 2023, 11, 84636. [Google Scholar] [CrossRef]
- Bobobee, E.D.; Wang, S.; Takyi-Aninakwa, P.; Zou, C.; Appiah, E.; Hai, N. Improved particle swarm optimization–long short-term memory model with temperature compensation ability for the accurate state of charge estimation of lithium-ion batteries. J. Energy Storage 2024, 84, 110871. [Google Scholar] [CrossRef]
- Zhao, H.; Liao, C.; Zhang, C.; Wang, L.; Wang, L. State-of-charge estimation of lithium-ion battery: Joint long short-term memory network and adaptive extended Kalman filter online estimation algorithm. J. Power Sources 2024, 604, 234451. [Google Scholar] [CrossRef]
- Yang, K.; Wang, Y.; Tang, Y.; Zhang, S.; Zhang, Z. A temporal convolution and gated recurrent unit network with attention for state of charge estimation of lithium-ion batteries. J. Energy Storage 2023, 72, 108774. [Google Scholar] [CrossRef]
- Wu, F.; Wang, S.; Liu, D.; Cao, W.; Fernandez, C.; Huang, Q. An improved convolutional neural network-bidirectional gated recurrent unit algorithm for robust state of charge and state of energy estimation of new energy vehicles of lithium-ion batteries. J. Energy Storage 2024, 82, 110574. [Google Scholar] [CrossRef]
- Bian, C.; Yang, S.; Liu, J.; Zio, E. Robust state-of-charge estimation of Li-ion batteries based on multichannel convolutional and bidirectional recurrent neural networks. Appl. Soft Comput. 2022, 116, 108401. [Google Scholar] [CrossRef]
- Hu, C.; Cheng, F.; Ma, L.; Li, B. State of charge estimation for lithium-ion batteries based on TCN-LSTM neural networks. J. Electrochem. Soc. 2022, 169, 030544. [Google Scholar] [CrossRef]
- Sherkatghanad, Z.; Ghazanfari, A.; Makarenkov, V. A self-attention-based CNN-Bi-LSTM model for accurate state-of-charge estimation of lithium-ion batteries. J. Energy Storage 2024, 88, 111524. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Yang, R.; Shen, W.; Sun, F. State-of-charge estimation of lithium-ion battery using an improved neural network model and extended Kalman filter. J. Clean. Prod. 2019, 234, 1153–1164. [Google Scholar] [CrossRef]
- Tang, A.; Huang, Y.; Liu, S.; Yu, Q.; Shen, W.; Xiong, R. A novel lithium-ion battery state of charge estimation method based on the fusion of neural network and equivalent circuit models. Appl. Energy 2023, 348, 121578. [Google Scholar] [CrossRef]
- Wang, C.; Wang, S.; Zhou, J.; Qiao, J.; Yang, X.; Xie, Y. A novel back propagation neural network-dual extended Kalman filter method for state-of-charge and state-of-health co-estimation of lithium-ion batteries based on limited memory least square algorithm. J. Energy Storage 2023, 59, 106563. [Google Scholar] [CrossRef]
- Hou, J.; Xu, J.; Lin, C.; Jiang, D.; Mei, X. State of charge estimation for lithium-ion batteries based on battery model and data-driven fusion method. Energy 2024, 290, 130056. [Google Scholar] [CrossRef]
- Oh, S.; Kim, J.; Moon, I. Hybrid data-driven deep learning model for state of charge estimation of Li-ion battery in an electric vehicle. J. Energy Storage 2024, 97, 112887. [Google Scholar] [CrossRef]
- Wu, A.; Lu, Y.; Guo, Z.; Hou, Z. Three-dimensional localization for moving target using modified Sage-Husa adaptive filter. J. Natl. Univ. Def. Technol. 2023, 45, 146–154. [Google Scholar]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Kollmeyer, P. Panasonic 18650PF Li-Ion Battery Data; Mendeley Data, V1; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Value |
|---|---|
| Capacity | Min. 2.75 Ah/Typ. 2.9 Ah |
| Mass | 48 g |
| Energy storage | 9.9 Wh |
| Min/max voltage | 2.5 V/4.2 V |
| Nominal open circuit voltage | 3.6 V |
| Dynamic Profiles | ME (%) | MAE (%) | RMSE (%) |
|---|---|---|---|
| US06 | 0.95 | 0.42 | 0.51 |
| UDDS | 1.91 | 1.10 | 1.19 |
| LA92 | 2.27 | 1.23 | 1.41 |
| HWFT | 1.36 | 0.68 | 0.82 |
| Methods | Insufficient Data-Driven | Sufficient Data-Driven | |||||
|---|---|---|---|---|---|---|---|
| ME (%) | MAE (%) | RMSE (%) | ME (%) | MAE (%) | RMSE (%) | ||
| Model-based | AEKF | 4.42 | 1.49 | 1.85 | 4.42 | 1.49 | 1.85 |
| UKF | 4.72 | 1.23 | 1.63 | 4.72 | 1.23 | 1.63 | |
| Mechine learning | RF | 13.13 | 7.42 | 7.94 | 9.73 | 5.87 | 6.25 |
| RVM | 17.20 | 4.76 | 5.36 | 2.22 | 1.28 | 1.49 | |
| Deep learning | LSTM | 17.20 | 4.76 | 5.36 | 2.22 | 1.28 | 1.49 |
| GRU | 11.68 | 5.27 | 5.41 | 3.41 | 3.12 | 3.39 | |
| Our proposed | 0.71 | 0.33 | 0.37 | 0.55 | 0.21 | 0.24 | |
| Methods | Insufficient Data-Driven | Sufficient Data-Driven | |||||
|---|---|---|---|---|---|---|---|
| ME (%) | MAE (%) | RMSE (%) | ME (%) | MAE (%) | RMSE (%) | ||
| Model-based | AEKF | 4.50 | 1.38 | 1.75 | 4.50 | 1.38 | 1.75 |
| UKF | 7.50 | 1.27 | 1.99 | 7.50 | 1.27 | 1.99 | |
| Mechine learning | RF | 17.14 | 4.58 | 5.16 | 10.96 | 3.13 | 3.38 |
| RVM | 15.18 | 2.69 | 3.18 | 2.83 | 1.22 | 1.44 | |
| Deep learning | LSTM | 8.28 | 3.58 | 3.86 | 3.79 | 1.88 | 2.37 |
| GRU | 8.73 | 3.02 | 3.24 | 4.01 | 1.88 | 2.23 | |
| Our proposed | 0.88 | 0.31 | 0.38 | 0.57 | 0.22 | 0.25 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, X.; Liu, L. A Multi-Timescale Method for State of Charge Estimation for Lithium-Ion Batteries in Electric UAVs Based on Battery Model and Data-Driven Fusion. Drones 2025, 9, 247. https://doi.org/10.3390/drones9040247
Cao X, Liu L. A Multi-Timescale Method for State of Charge Estimation for Lithium-Ion Batteries in Electric UAVs Based on Battery Model and Data-Driven Fusion. Drones. 2025; 9(4):247. https://doi.org/10.3390/drones9040247
Chicago/Turabian StyleCao, Xiao, and Li Liu. 2025. "A Multi-Timescale Method for State of Charge Estimation for Lithium-Ion Batteries in Electric UAVs Based on Battery Model and Data-Driven Fusion" Drones 9, no. 4: 247. https://doi.org/10.3390/drones9040247
APA StyleCao, X., & Liu, L. (2025). A Multi-Timescale Method for State of Charge Estimation for Lithium-Ion Batteries in Electric UAVs Based on Battery Model and Data-Driven Fusion. Drones, 9(4), 247. https://doi.org/10.3390/drones9040247