1. Introduction
Unmanned Aerial Vehicles (UAVs) have demonstrated remarkable capabilities in executing complex tasks in hazardous environments due to their compact size, high maneuverability, strong adaptability, and cost-effectiveness [
1,
2]. However, as workloads and mission complexities increase, the limitations of single UAVs, such as low efficiency and poor flexibility, have become more apparent [
3]. Collaborative operations of UAV swarms exhibit enhanced performance in cooperative efficiency, fault tolerance, and robust autonomy, particularly when addressing complex mission requirements [
4,
5]. In recent years, significant technological advancements have contributed to the widespread application of UAV swarms across various fields, including search and rescue (SAR) [
6,
7], smart agriculture [
8,
9], remote sensing [
10,
11,
12], intelligent transportation [
13,
14], and delivery system [
15,
16]. A critical prerequisite for successfully executing missions for the UAV swarms is the implementation of effective path-planning strategies [
17]. Optimal path planning can improve efficiency by minimizing time, reducing costs, and helping to avoid collisions. The multiple UAV path-planning problem is categorized as a non-deterministic polynomial (NP) hard problem, presenting a complex optimization challenge with numerous constraints [
18]. This problem aims to develop the most appropriate algorithm for determining UAV optimal flight trajectories, guiding them from the starting point to the destination while minimizing total costs and satisfying specific constraints [
19,
20].
Path-planning algorithms can be categorized into two main types: traditional algorithms and meta-heuristic algorithms. Common traditional algorithms include the A* algorithm [
21], the Dijkstra algorithm [
22], the Rapidly-exploring Random Tree (RRT) algorithm [
23], etc. Previously, the path-planning problem was conceptualized as a shortest-path optimization task, which could be effectively addressed using traditional algorithms [
24]. However, path planning has evolved into a complex optimization problem characterized by discontinuity, non-linearity, multi-modality, and inseparability in the past few years [
25]. The optimal path-planning problem now includes fuel consumption, environmental hazards, and collision risks while facing escalating computational complexity due to rapidly expanding problem scales. Traditional algorithms, which rely heavily on graphs and nodes, demand continuous calculation and storage of relevant data throughout execution [
26]. This extensive computational and storage requirement is prone to errors and significantly diminishes algorithm efficiency, particularly in large-scale and complex scenarios [
27]. On the contrary, meta-heuristic algorithms, with their inherent simplicity, parallelism, and localized interaction, are well-suited for large-scale computing problems [
28]. Unlike traditional algorithms, they do not require huge computations or precise mathematical models and can find high-quality solutions for path-planning problems under complex constraints [
29,
30]. As a result, research in path planning has gradually shifted from traditional algorithms to meta-heuristic approaches.
Meta-heuristic algorithms are intelligent algorithms that take inspiration from nature and seek optimal solutions by mimicking behaviors and processes observed in biological systems [
31]. These algorithms address optimization problems by minimizing or maximizing an objective function within a defined solution space. Various meta-heuristic algorithms have been applied to address multi-UAV path-planning challenges. For example, Wang et al. [
32] proposed an approach utilizing the Lévy flight search strategy and an enhanced variable-speed bat algorithm, improving path-planning performance for multiple reconnaissance UAVs under diverse limitations. Shi et al. [
33] proposed an adaptive multi-UAV path-planning method (AP-GWO) that improves the grey wolf algorithm to greatly alleviate the slow convergence and insufficient flight trajectories in path-planning problems. He et al. [
34] proposed a novel hybrid algorithm (HIPSOMSOS) by integrating enhanced particle swarm optimization and improved symbiotic organism search. This approach employed a time stamp segmentation (TSS) model to optimize the computation of UAV coordination costs. Li et al. [
35] presented an asynchronous ant colony optimization (AACO) algorithm to address the detection challenge of large and complex buildings through multi-UAV 3D coverage path planning. Lu et al. [
36] designed a drone–rider joint delivery mode with multi-distribution center collaboration that optimizes takeout delivery through a two-stage heuristic algorithm, significantly reducing delivery costs and improving customer satisfaction. Moreover, other meta-heuristic algorithms such as the Whale Optimization Algorithm (WOA) [
37,
38], Artificial Bee Colony (ABC) [
39,
40], and Pigeon Inspired Optimization (PIO) [
41,
42] have been successfully applied in this research domain.
The slime mold algorithm (SMA) has garnered significant attention among various meta-heuristic algorithms due to its unique characteristics. A notable advantage of SMA is its simplicity, as it requires only a single parameter to be tuned, which greatly reduces the implementation complexity. Additionally, its strong scalability makes it highly adaptable for integration with other algorithms and further enhancements [
43]. Moreover, the adaptive weight mechanism and oscillatory behavior provide excellent exploitation capabilities, which have been proven to outperform traditional algorithms such as particle swarm optimization (PSO) [
44], grey wolf optimization (GWO) [
45], and firefly algorithm (FA) [
46] in multi-modal benchmark functions [
47]. These features render SMA particularly suitable for solving multi-UAV path-planning challenges in complex obstacle-rich environments. Consequently, several variants of SMA have been developed and applied in this field. For example, Abdel-Basset et al. [
48] presented a new multi-objective optimization algorithm called hybrid slime mold optimizer (HSMA) to strengthen UAV performance in multi-objective 3D path-planning problems. Specifically, HSMA utilized Pareto optimality to switch between various objectives. Xiong et al. [
49] enhanced the SMA regarding the initial population position, the feedback factor, and the individual position updating method. They proposed a collaborative algorithm called ISMA for addressing multi-UAV path-planning problems in complex environments. Zhang et al. [
50] implemented three different strategies: the Cauchy mutation operator, the crossover rate balance mechanism, and the self-adaptive restart hybrid opposition learning to improve the performance of SMA, and they developed a self-adaptive hybrid mutation slime mold algorithm (AHCSMA) to tackle the UAV path-planning problem. To generate shorter lengths and higher smoothness routes, an improved slime mold algorithm (HG-SMA) was designed by Hu et al. [
51] to address the smooth path-planning problem using the Said–Ball curve.
These fruitful research achievements have demonstrated the superior performance of SMA in addressing multi-UAV path-planning problems. Nevertheless, SMA exhibits inherent limitations, including improper exploration–exploitation balance, premature convergence, and insufficient mechanisms for escaping local optima. These shortcomings significantly restrict the flexibility and adaptability of SMA, impairing its optimization efficacy in complex multi-UAV path-planning scenarios.
For this reason, this paper proposes a self-adaptive improved slime mold algorithm (AI-SMA) and applies it to multi-UAV path-planning problems. First of all, inspired by the ranking-based differential evolution (rank-DE), a novel search mechanism is introduced. Rank-DE is characterized by its simplified architecture and rapid operational speed, which effectively improves the exploration capability of the algorithm while maintaining computational complexity [
52]. By combining the excellent exploration qualities of rank-DE with SMA, AI-SMA can achieve a better balance between exploration and exploitation. Subsequently, a self-adaptive switch operator is designed, featuring a non-linear transition that adapts with increasing iterations. This dynamic operator can maintain population diversity in later stages and reduces the likelihood of premature convergence. Lastly, a self-adaptive perturbation strategy is implemented to provide a new direction for population evolution by making slight adjustments to the positions of individuals. This strategy enables the algorithm to escape local optima while accelerating convergence speed.
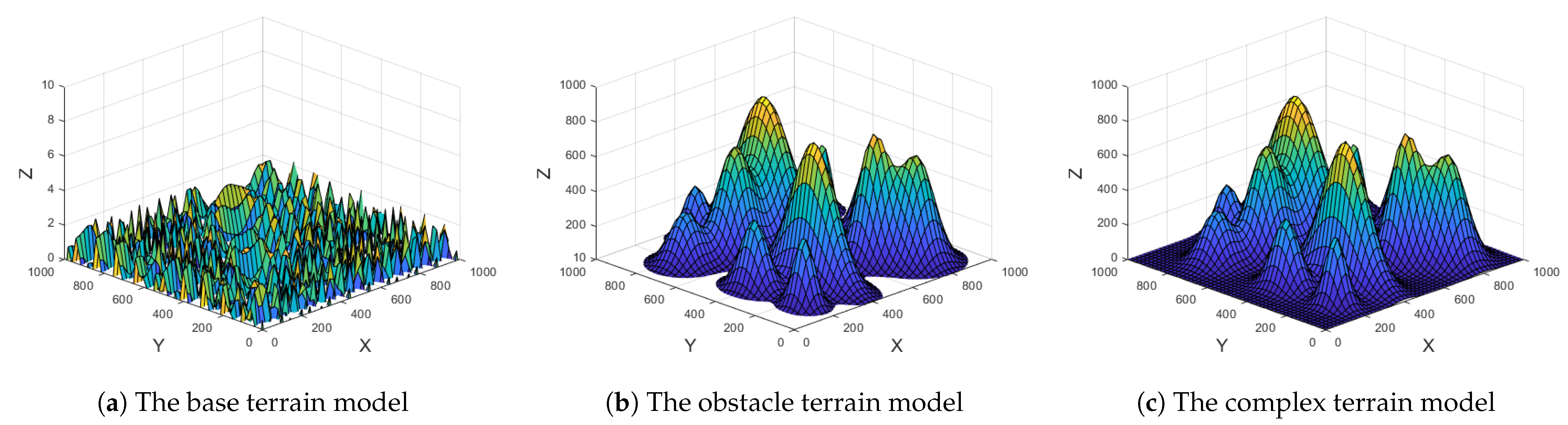
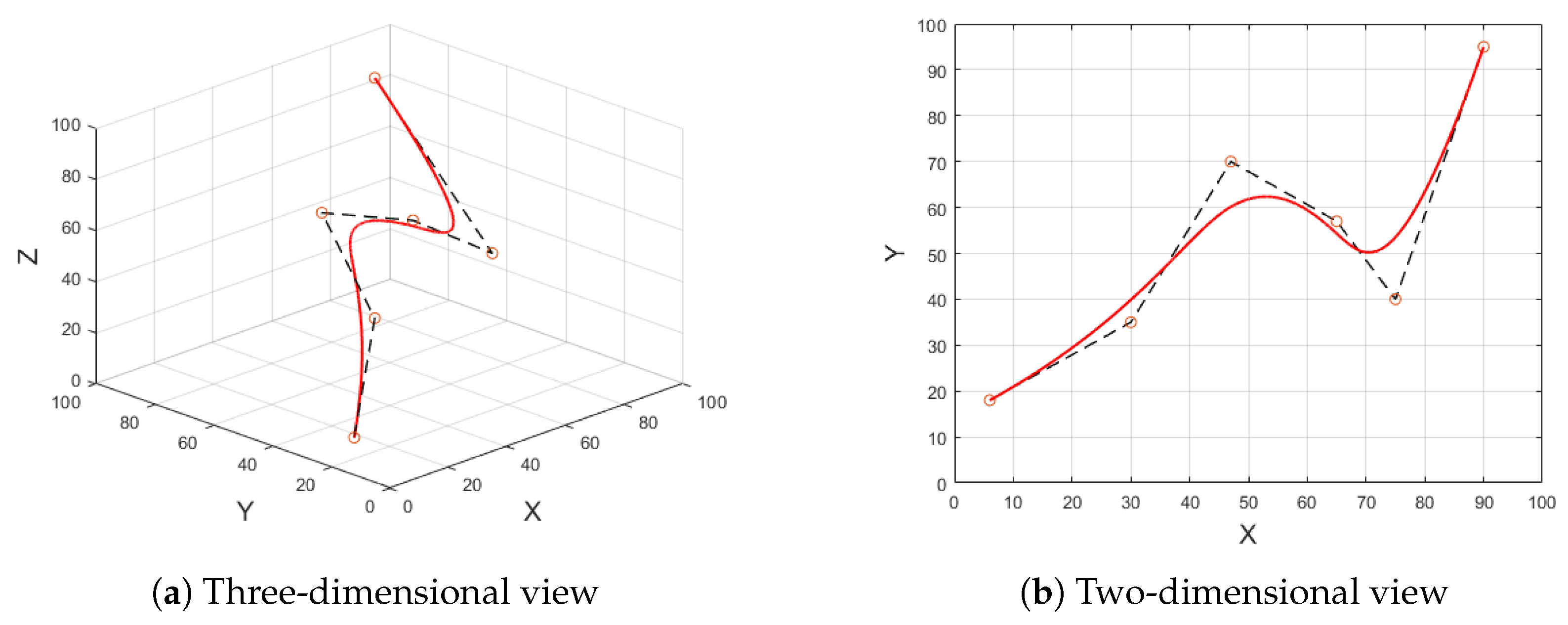
Furthermore, a three-dimensional complex terrain model with various obstacles is established, and the cubic B-spline curves are utilized to smooth the flight trajectory. The cost function considers five key factors: flight distance, flight height, flight turning angle, collisions between UAVs and obstacles, and collisions among multiple UAVs. To validate the optimization capabilities of AI-SMA, the algorithm was tested against well-established meta-heuristics on the CEC 2017 benchmark test suite and various multi-UAV path-planning scenarios. The primary contributions of this study are summarized as follows:
The multi-UAV path-planning problem is modeled as a constrained optimization problem, with the cost function including five key constraints. A complex terrain model is established to address multi-UAV path-planning challenges.
A self-adaptive improved slime mold algorithm (AI-SMA) is introduced. Three significant enhancements are incorporated into this algorithm: a novel search mechanism, a self-adaptive switch operator, and a self-adaptive perturbation strategy.
The performance of AI-SMA is assessed through the CEC 2017 benchmark test set and multi-UAV path-planning scenarios. Effectiveness analysis, convergence behavior analysis, strategy validity, and parameter analysis are conducted.
The rest of this paper is structured as follows.
Section 2 establishes the multi-UAV path-planning model and defines the cost function.
Section 3 provides preliminary information for SMA and rank-DE.
Section 4 introduces the mathematical model of AI-SMA.
Section 5 discusses the experimental results and analysis of AI-SMA. Finally,
Section 6 provides the conclusions of the study.
4. Proposed Algorithm
This section provides detailed information about the proposed algorithm. The steps and advantages of three enhancements of AI-SMA, i.e., a novel search mechanism, a self-adaptive switch operator, and a self-adaptive perturbation strategy, are explained. Additionally, the analysis of the computational complexity is provided. The complete pseudo-code of the algorithm and the framework diagram addressing the multi-UAV path-planning problems are shown.
4.1. A Novel Search Mechanism
The exploration versus exploitation trade-off is a constant challenge for meta-heuristic algorithms during the search process [
66]. During the exploration phase, individuals are encouraged to search the solution space extensively, increasing the likelihood of finding a globally optimal solution. However, excessive exploration may lead to poor or no algorithm convergence. The exploitation phase promotes searching in small steps near the current optimal area, which allows the population to converge more quickly. Too much exploitation can trap the algorithm in local optima, resulting in premature convergence.
According to the position updating formula for SMA presented in Equation (
22), when
, the algorithm simulates exploration behavior by generating random positions. If
, the algorithm manages the exploitation range of slime molds by adjusting the values of
and
. Nevertheless, this approach significantly restricts the exploration ability of slime molds. Numerous experiments indicate that the value of
z is typically set at 0.03, which makes a low exploration probability for the algorithm to escape optima, particularly when the population becomes homogenized during the later stages of iterations.
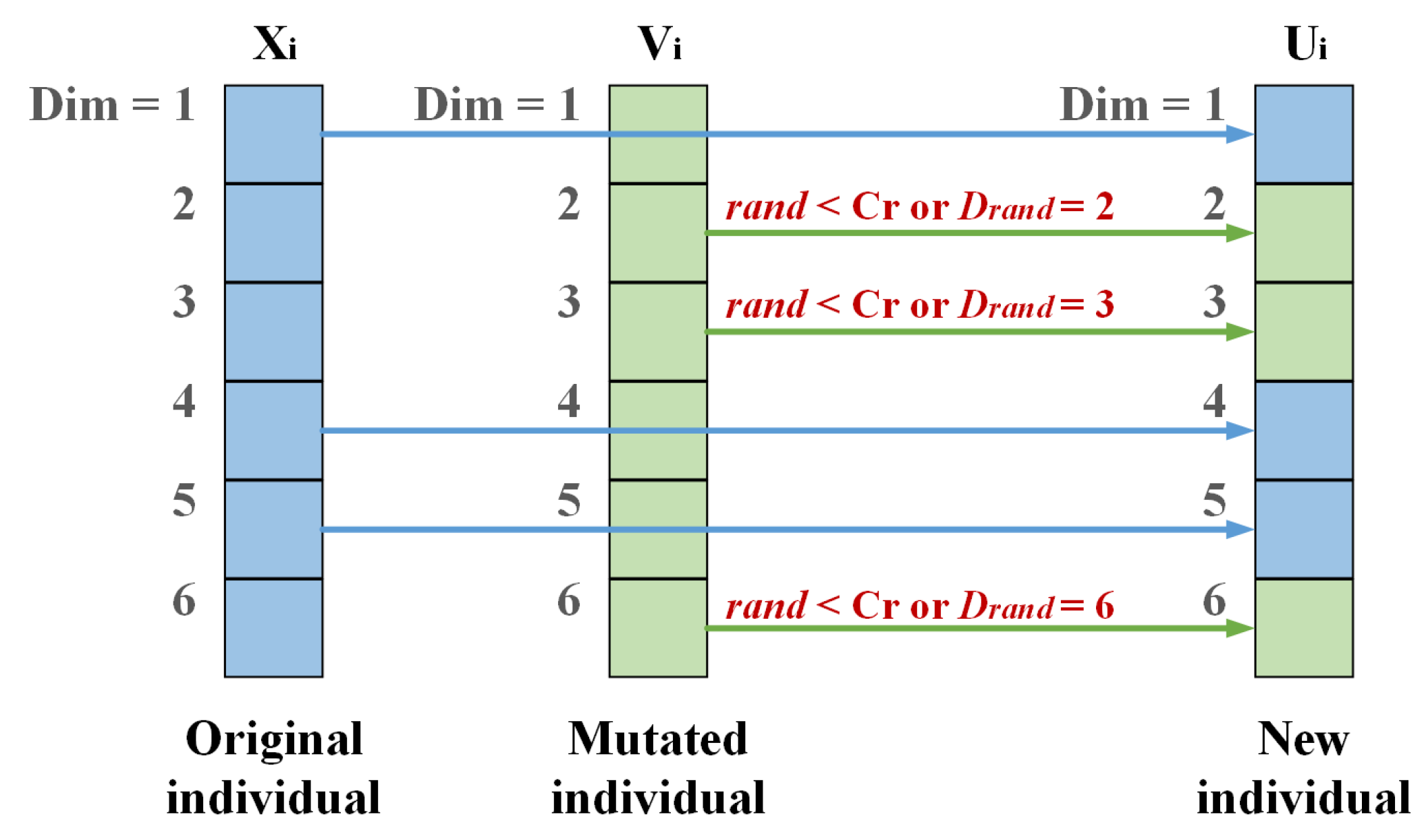
To this end, a novel search mechanism is proposed that replaces a portion of the exploitation phase in SMA with the mutation operation from rank-DE. The crossover operator replaces the parameter p, which controls the position update mode of slime molds. This integration of mutation and crossover from rank-DE increases the probability of the global search of SMA, effectively improving the exploration ability of AI-SNA and helping balance exploitation and exploration during the search process.
The novel position update formula is described as follows:
where
is the updated position resulting from the novel search mechanism in the current iteration.
S denotes the self-adaptive switch operator, which will be discussed in
Section 4.2.
represents the individual position after mutation, shown as follows:
The scaling factor F is replaced with a random value within the range to avoid introducing new parameters into the algorithm. The individual indexes , , and are selected in Algorithm 1.
4.2. A Self-Adaptive Switch Operator
The optimization processes for most real-world problems exhibit non-linearity and complexity, which significantly constrain the performance of meta-heuristic algorithms with fixed search strategies. In SMA, the parameter z controls the behavior between local exploitation and global exploration. However, as iterations progress and population difference decreases, a fixed value for z may hinder the abilities of algorithms to explore better solutions.
Consequently, AI-S MA converts parameter z from a fixed probability into a non-linear parameter S. This transformation enables the algorithm to maintain a certain level of global search capability throughout the iterations, enhancing the quality of the optimal solution in the later stages and helping to prevent premature convergence.
The self-adaptive switch operator is calculated as follows:
Figure 6 illustrates that the value of
S grows as the iteration count increases. Initially,
S is relatively small, indicating that the likelihood of the population generating random positions within the search space is minimal. This encourages individuals in the population to focus more on exploiting potential areas. As iterations progress,
S gradually rises, which enhances the probability of random distribution among the individuals. This increase is beneficial for escaping the current optima and exploring promising regions throughout the optimization process.
In addition, considering the algorithm convergence, the growth range of
S is intentionally limited. As shown in
Figure 6, the value of
S rises from approximately 0.2556 to 0.502 over 1000 iterations. This indicates that, in most cases, the population will effectively exploit the environment to locate the optimal solution, while the convergence curves will not oscillate due to the increased probability of randomness.
4.3. A Self-Adaptive Perturbation Strategy
When the population remains stagnant for several iterations, the positions of individuals tend to stabilize. This stability can lead to getting trapped in a local optimum, resulting in premature convergence. To address this issue, a self-adaptive perturbation strategy is implemented as a fine-tuning process within the population structure. This strategy aims to help the algorithm escape from suboptimal solutions when encountering stagnation.
In AI-SMA, a stagnation counter is initialized at zero to determine whether the algorithm has stagnated. In each iteration, the difference between the optimal fitness value of the current and previous iterations is calculated. In the first iteration, this difference is set to infinity. For subsequent iterations, if the absolute value of this difference is less than the perturbation operator, denoted as , the stagnation counter is incremented by one. Otherwise, the counter is reset to zero. When the stagnation counter reaches the perturbation threshold, denoted as , the algorithm is considered stagnated, and the self-adaptive perturbation strategy is implemented. After applying the perturbation, the next iteration is executed. If the threshold has not been reached, AI-SMA proceeds directly to the next iteration. The algorithm terminates when the iteration count t reaches the maximum limitation .
The core idea behind a self-adaptive perturbation strategy is to enhance the population by removing poorly performing individuals and replacing them with new ones. In detail, the worst-performing individuals are eliminated based on their fitness values. Subsequently, an additional new individuals are introduced to refresh the population. The positions of these newly added individuals are determined by balancing the optimal individual positions and randomly generated positions, ensuring that valuable information from the best individual is retained while incorporating some randomness.
The self-adaptive perturbation strategy is illustrated in the following:
where
and
are random number within the interval
.
represents the optimal position reached in all iterations.
indicates the worst
individuals in the population, ranked by fitness value.
is set to
and
is set to 15 in this study.
Algorithm 2 presents the pseudo-code of AI-SMA.
| Algorithm 2 The pseudo-code of AI-SMA |
Input: Population size NP, Dimension Dim, Lower boundary LB, Upper Boundary UB, Maximum number of iterations , Crossover Rate Cr, Perturbation Rate .
Output: Optimal position , Optimal fitness .
- 1:
Initialize the positions of population X and parameters; - 2:
calculate using Equation ( 29); - 3:
; - 4:
while
do - 5:
calculate using Equation ( 35); - 6:
calculate using Equation ( 25); - 7:
for do - 8:
calculate the fitness value for each ; - 9:
end for - 10:
calculate using Equation ( 26); - 11:
evaluate the global optimal position and global optimal fitness; - 12:
for do - 13:
if then - 14:
update the new position using Equation ( 33) (1); - 15:
else - 16:
for do - 17:
if then - 18:
update the new position using Equation ( 33) (2); - 19:
else - 20:
select using Algorithm 1; - 21:
update the new position using Equation ( 33) (3); - 22:
end if - 23:
end for - 24:
end if - 25:
if then - 26:
Replace with ; - 27:
end if - 28:
end for - 29:
update the global optimal position and global optimal fitness; - 30:
if then - 31:
; - 32:
else - 33:
; - 34:
end if - 35:
if then - 36:
implement self-adaptive perturbation strategy using Equation ( 36); - 37:
end if - 38:
end while
|
Overall, the framework of AI-SMA for addressing multi-UAV path-planning problems is depicted in
Figure 7.
4.4. Computational Complexity Analysis
AI-SMA comprises six main components: initialization, selection probability calculation, fitness evaluation and sorting, weight matrix calculation, positions update, and self-adaptive perturbation strategy.
Let
N be the population size,
D the dimension of the problem, and
T the maximum iteration limitation. The initialization process has a computational complexity of
. The computation complexity for selection probability calculation is
[
52]. These two processes are performed only once in AI-SMA and do not occur with iteration. In each iteration, the fitness evaluation and sorting require
, while the weight matrix calculation and positions updates both demand
. Although the perturbation strategy is not executed in every iteration, its worst-case computational complexity is
. Therefore, the overall computational complexity of AI-SMA is
.
In comparison, the original SMA has a complexity of
[
47]. Though AI-SMA introduces an additional
complexity compared to SMA, its overall computational complexity remains roughly the same since
is dominated by
for large values of
N.
5. Simulation Results and Analysis
This section compares AI-SMA with seven well-known meta-heuristic algorithms using the CEC 2017 benchmark test suite. Following this comparison, experiments were conducted on multi-UAV path-planning problems using AI-SMA, conventional SMA, and three well-established SMA variants. Furthermore, parameter experiments were carried out to select the optimal parameter combinations. Strategy validity experiments were also undertaken to assess the effectiveness of different strategies within AI-SMA.
All experiments were performed on an Ubuntu 22.04.4 LTS operating system, equipped with 125 GiB of RAM and an Intel(R) Xeon(R) Gold 5218 GPU (2.30 GHz). The algorithms were implemented in Python 3.11.0, and the results were visualized using MATLAB R2022a.
5.1. CEC 2017 Experiments
The CEC 2017 benchmark test suite is widely recognized for evaluating real parameter single objective optimization problems [
67]. Compared to the latest versions, such as CEC 2021 and CEC 2022, the CEC 2017 test suite offers a broader variety of functions, facilitating a more comprehensive evaluation across diverse scenarios [
68,
69]. It consists of 29 functions categorized into four groups: unimodal functions (
), simple multi-modal functions (
), hybrid functions (
), and composition functions (
). The definition domain for all functions is in the interval of
. Details of benchmark functions are listed in
Table 1, including the optimal fitness value (
) for each function.
5.1.1. Effectiveness Analysis
To begin with, a numerical analysis was conducted using the CEC 2017 test set to verify the effectiveness of AI-SMA. AI-SMA was compared with seven well-regarded meta-heuristic algorithms, including SMA [
47], DE [
70], PSO [
44], WOA [
71], GWO [
45], SSA [
72], and SCA [
73]. DE and PSO are the most influential and historically significant algorithms in the field [
74,
75]. WOA, GWO, SSA, and SCA are representative of popular meta-heuristic algorithms developed in recent years and have shown superior performance over other classic algorithms, such as GSA [
76], GA [
77], BA [
78], and ACO [
79], across multiple benchmark functions in their original literature. SMA, as the foundation of AI-SMA, was also included as a baseline for comparison.
The effectiveness of the algorithms was evaluated using three metrics: best fitness (BEST), average fitness (AVG), and standard deviation (STD). Best fitness indicates the best performance achieved by the algorithm, while average fitness determines the consistency of the optimal solution in multiple experiments. Standard deviation measures the stability of the algorithm. In general, a smaller value for each of these three metrics indicates better algorithm performance.
Furthermore, the Friedman test and Wilcoxon’s rank-sum test were employed to evaluate the overall performance of the algorithms and the significance of the results. The Friedman test is a non-parametric statistical approach that assesses the significance of differences in average algorithm rankings [
80]. The algorithm that ranks first has the best overall performance. Wilcoxon’s test is utilized to ensure the superior performance of the algorithm is not due to random chance [
81]. The performance of AI-SMA is considered justified if the test results are statistically significant.
The main parameter settings for these algorithms are outlined in
Table 2. The parameters for AI-SMA were determined by parameter experiments in
Section 5.4. The parameter configurations for other algorithms follow the recommended values from their original papers to ensure optimal performance. The population size (
) and the problem dimension (
) are both set to 30, while the maximum iteration limitation (
) is configured to 1000. To reduce the impact of randomness, each algorithm was run 30 times independently.
The experimental outcomes of AI-SMA and its counterparts on the CEC 2017 benchmark functions are summarized in
Table 3, with the best performance for each function highlighted in bold. The Friedman test results are displayed in the last two rows of
Table 3, while the statistical outcomes from Wilcoxon’s rank-sum test are illustrated in
Table 4.
As presented in
Table 3, benchmark functions are divided into 4 categories. In the first category, each unimodal function has a single optimal solution, which is useful for evaluating the exploitation capabilities of algorithms. AI-SMA achieves the best fitness for
and
, ranking second in average fitness and standard deviation within this category. This demonstrates that the strong exploitation capabilities of SMA, which are retained in AI-SMA, help it to perform well on unimodal functions. The novel search mechanism also enables AI-SMA to discover better solutions than SMA in these functions.
Simple multi-modal functions, from to , which contain many local optima, are ideal for examining the exploration abilities of algorithms. Experimental results indicate that AI-SMA achieves the best performance on , , , and , mainly because it employs mutation and crossover operators from rank-DE to enhance its exploitation capabilities. Although DE obtains a better average fitness and standard deviation than AI-SMA in and , AI-SMA shows far superior exploration capabilities overall compared to other algorithms.
to are hybrid functions that consist of linear combinations of unimodal and simple multi-modal functions. Compared to the first two categories, these functions present a greater challenge and are suitable for testing the balance between exploitation and exploration in algorithms. AI-SMA outperforms others on and achieves the best fitness on , , and . Despite AI-SMA ranking third behind SMA and DE in this category, its ability to attain the best fitness in various functions highlights its strong capacity to balance exploitation and exploration.
Regarding composition functions from to , these functions are composed of non-linear combinations drawn from the previous three categories. They are recognized as the most complex functions within the test suite and are well-suited for evaluating the comprehensive effectiveness of the algorithm. Among these ten benchmark functions, AI-SMA shows superior performance compared to its competitors on five functions: , , , , and . It also achieves the best average fitness on , , and . These results suggest that the novel search mechanism proposed by AI-SMA effectively aids the algorithm in finding optimal fitness in complex functions. Moreover, the self-adaptive switch operator and the self-adaptive perturbation strategy help escape local optima, thereby avoiding premature convergence.
In the last two rows of
Table 3, the Friedman test results indicate that AI-SMA ranks first among all eight algorithms, followed by SMA and DE. This ranking suggests that the proposed AI-SMA performs best across all functions tested. Moreover, AI-SMA improves the quality of optimal fitness by approximately
,
,
,
,
,
, and
for the respective competing algorithms.
Table 4 presents a pairwise comparison of the averages of the best solutions obtained for each algorithm. The significance level is set at
. Since the
p-values obtained from the test are below 0.05, the results are considered statistically significant for the CEC 2017 test set. This demonstrates that the performance of AI-SMA is statistically robust and not due to random chance. In other words, the optimized solutions achieved by AI-SMA result from a systematic and structured optimization process.
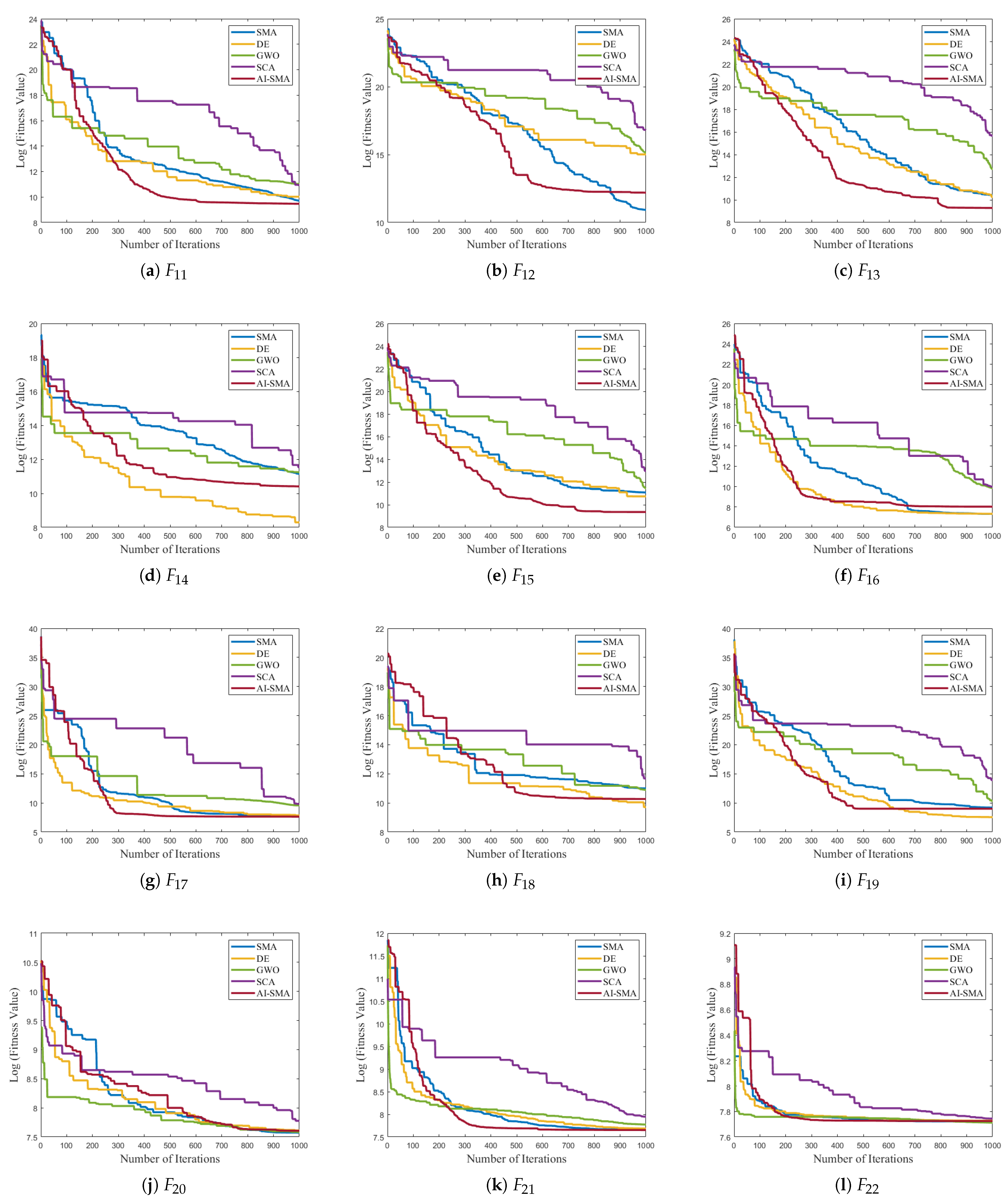
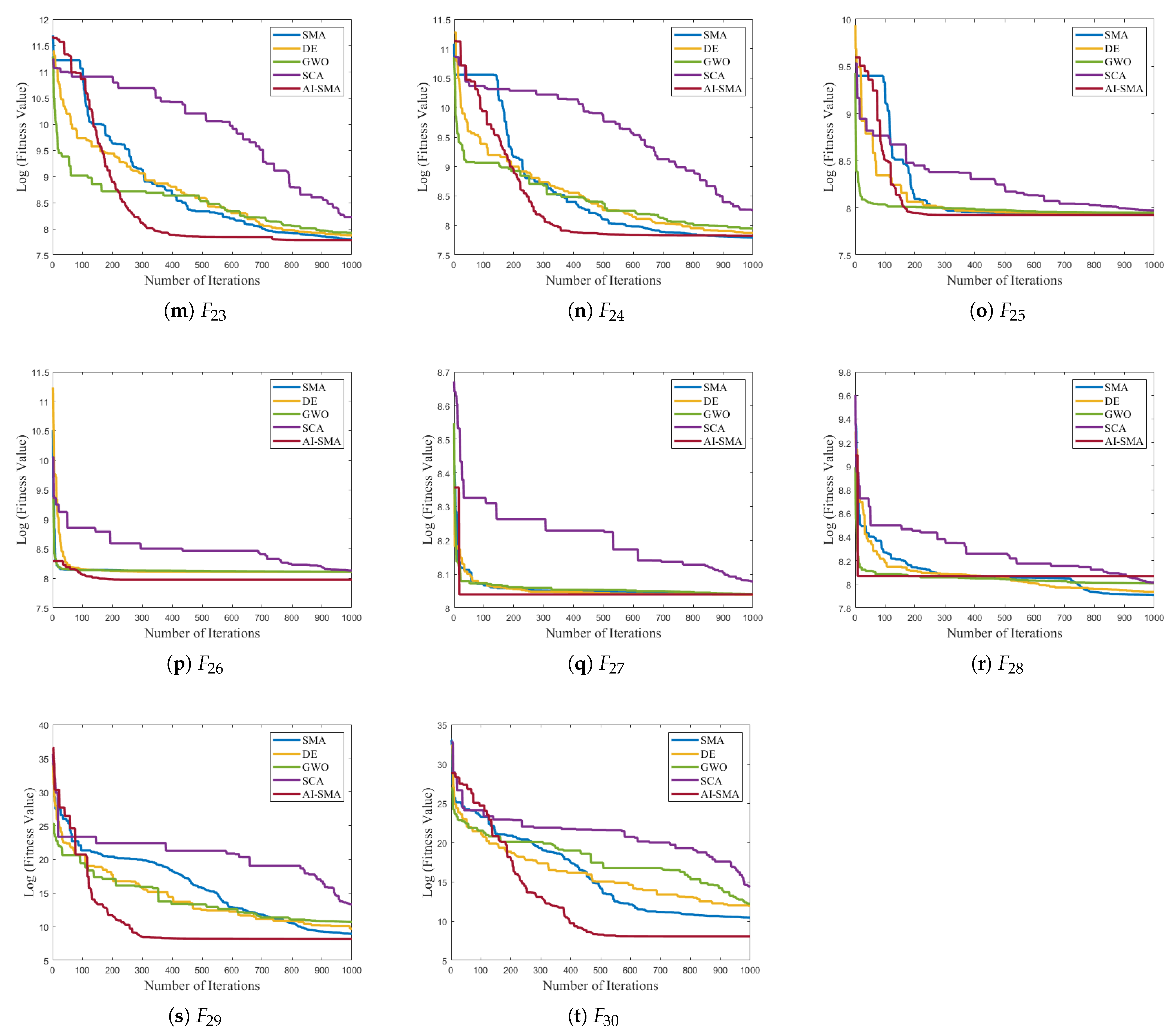
5.1.2. Convergence Behavior Analysis
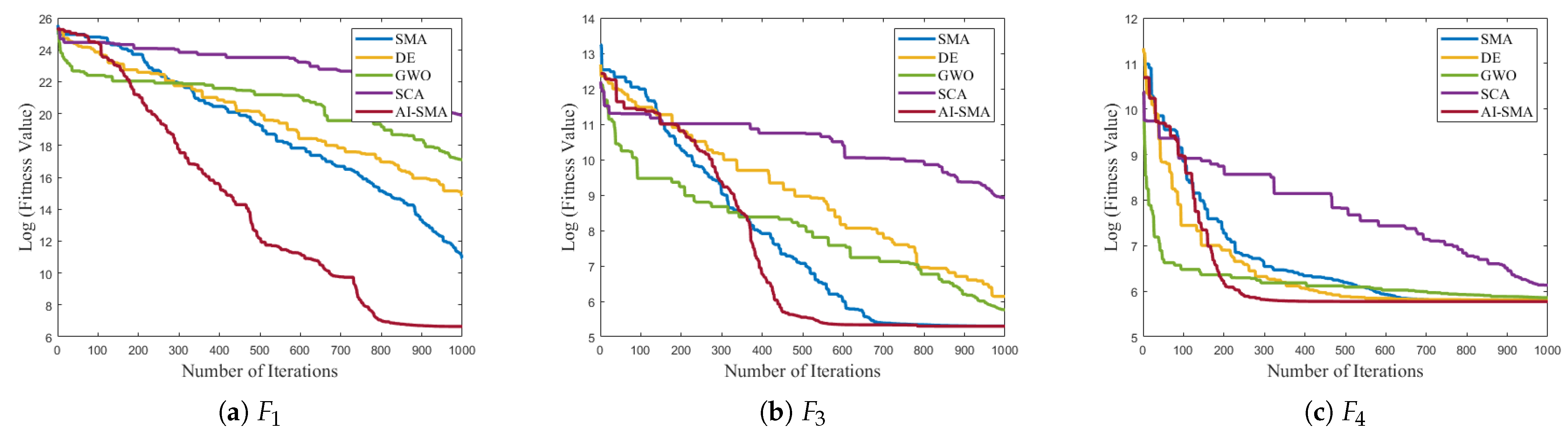
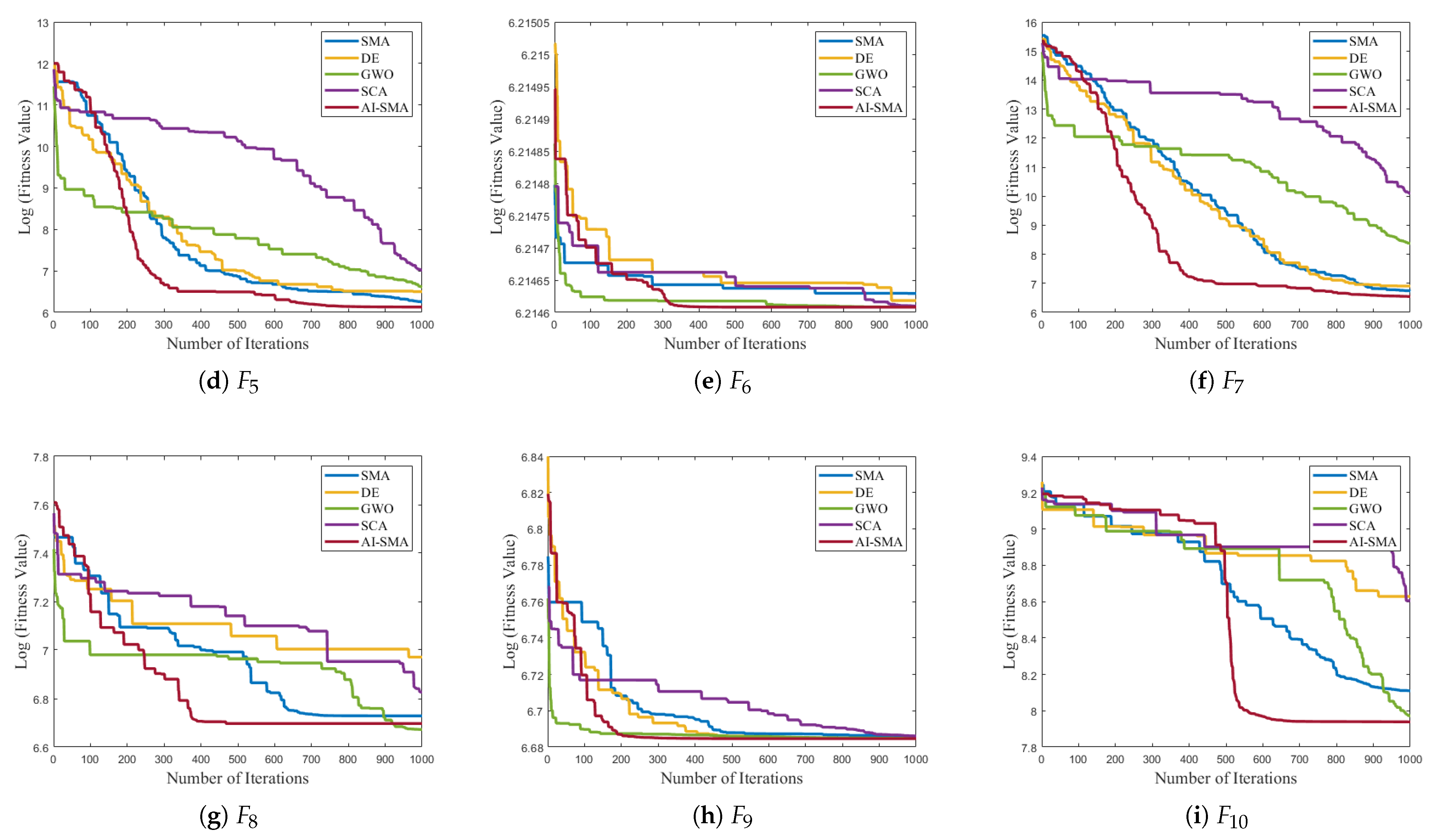
To further evaluate the convergence behavior of AI-SMA, the convergence curves of the top five well-performing algorithms in the effectiveness analysis were plotted.
Figure 8 shows the convergence curves for benchmark functions
to
, while the curves for
to
are presented in
Figure A1 in
Appendix A due to space limitations. The horizontal axis indicates the iteration count, and the vertical axis denotes the logarithm of the fitness value in these figures.
As depicted in
Figure 8 and
Figure A1, AI-SMA demonstrates stable convergence behavior across all functions, confirming the superior convergence properties. Additionally, AI-SMA converges more rapidly in the early stages than its competitors for most functions. This indicates that AI-SMA can detect stagnation and accelerate convergence through its self-adaptive perturbation strategy. Notably, AI-SMA exhibits superior convergence speed and the lowest fitness values than other algorithms on
, and
. This swift convergence is particularly crucial in scenarios that require rapid computations, such as rescue operations and real-time optimization tasks.
5.2. Multi-UAV Path Planning
Multi-UAV path-planning problems are more complex than benchmark functions because of intricate constraints and non-linear cost functions. SMA and its variants, ESMA [
82], CO-SMA [
83], and SMA-AGDE [
84], are selected as competitors for AI-SMA. These variants demonstrate excellent performance compared to common meta-heuristics discussed in their original papers. Among them, ESMA enhances SMA by integrating the Sine Cosine Algorithm (SCA), while CO-SMA offers a chaotic opposition-reinforced approach, combining the crossover-opposition technique with chaotic search methods. SMA-AGDE incorporates the adaptive guided differential evolution (AGDE) mutation method to improve the capabilities of SMA.
The test scenarios in this paper measure
, with the number of UAVs and waypoints set to
. All UAVs are instructed to fly from the starting point (0, 0, 0) to the terminal point (1000, 1000, 0). The maximum yaw angle constraint
and the maximum pitch angle constraint
are both set to
. The lower and upper height limitations for UAVs,
and
, are set at 10 and 950, respectively. The minimum safe distance between UAVs is
. The cost coefficients for the cost function are set as follows:
. Additionally, the weight coefficients are assigned as
. Furthermore, the population size (
NP) is fixed at 30, and the problem dimension (
) is fixed at 3. The maximum iteration limitation (
) is configured to 500. The results are based on 30 independent runs to ensure fairness. Details of the three scenarios are provided in
Table 5.
The parameter configurations for tested algorithms are provided in
Table 6. The parameters of competing algorithms align with the original literature.
Table 7 presents the comparative results of five algorithms across different scenarios.
Figure 9 illustrates the average convergence curves for these algorithms.
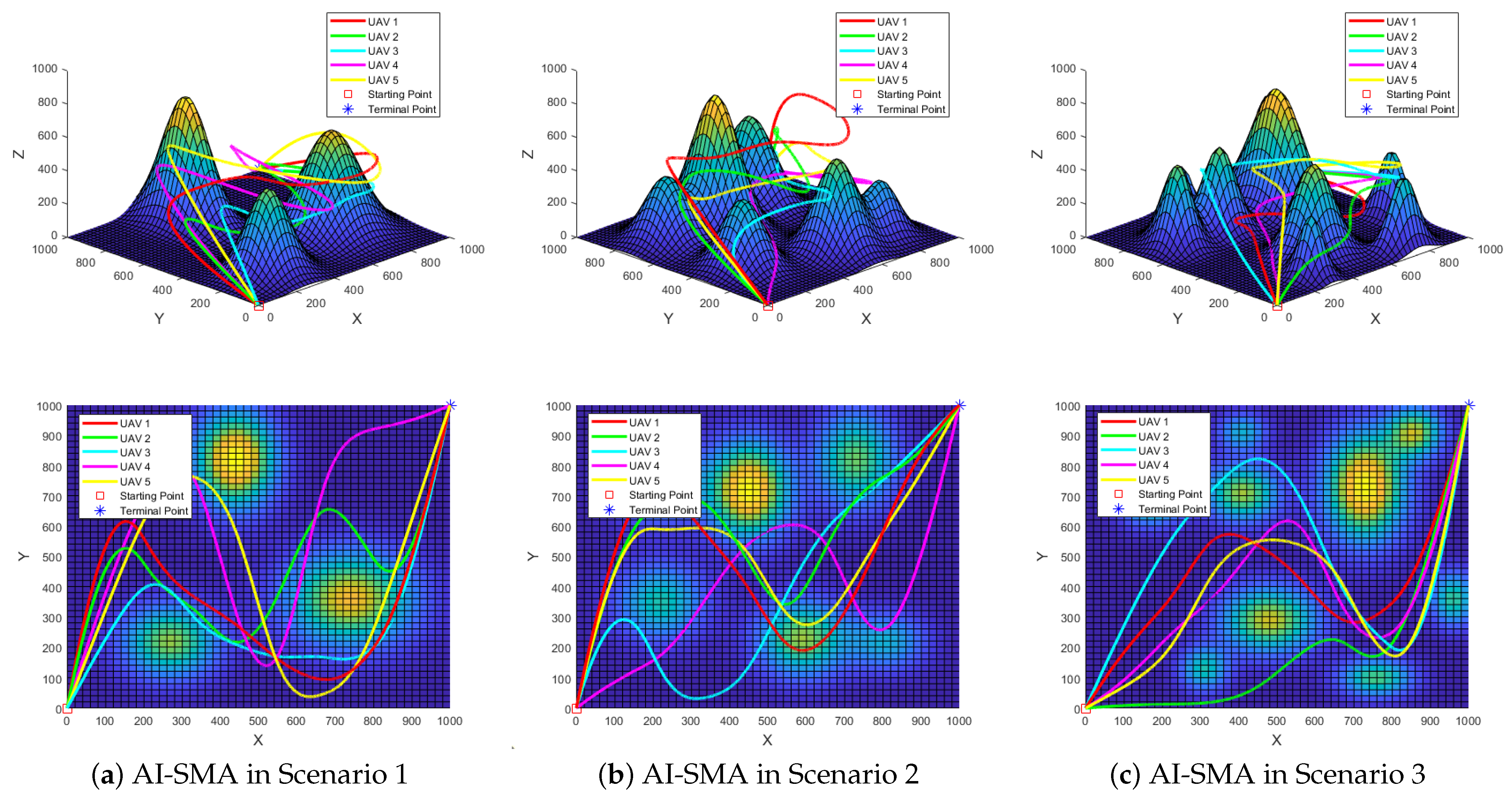
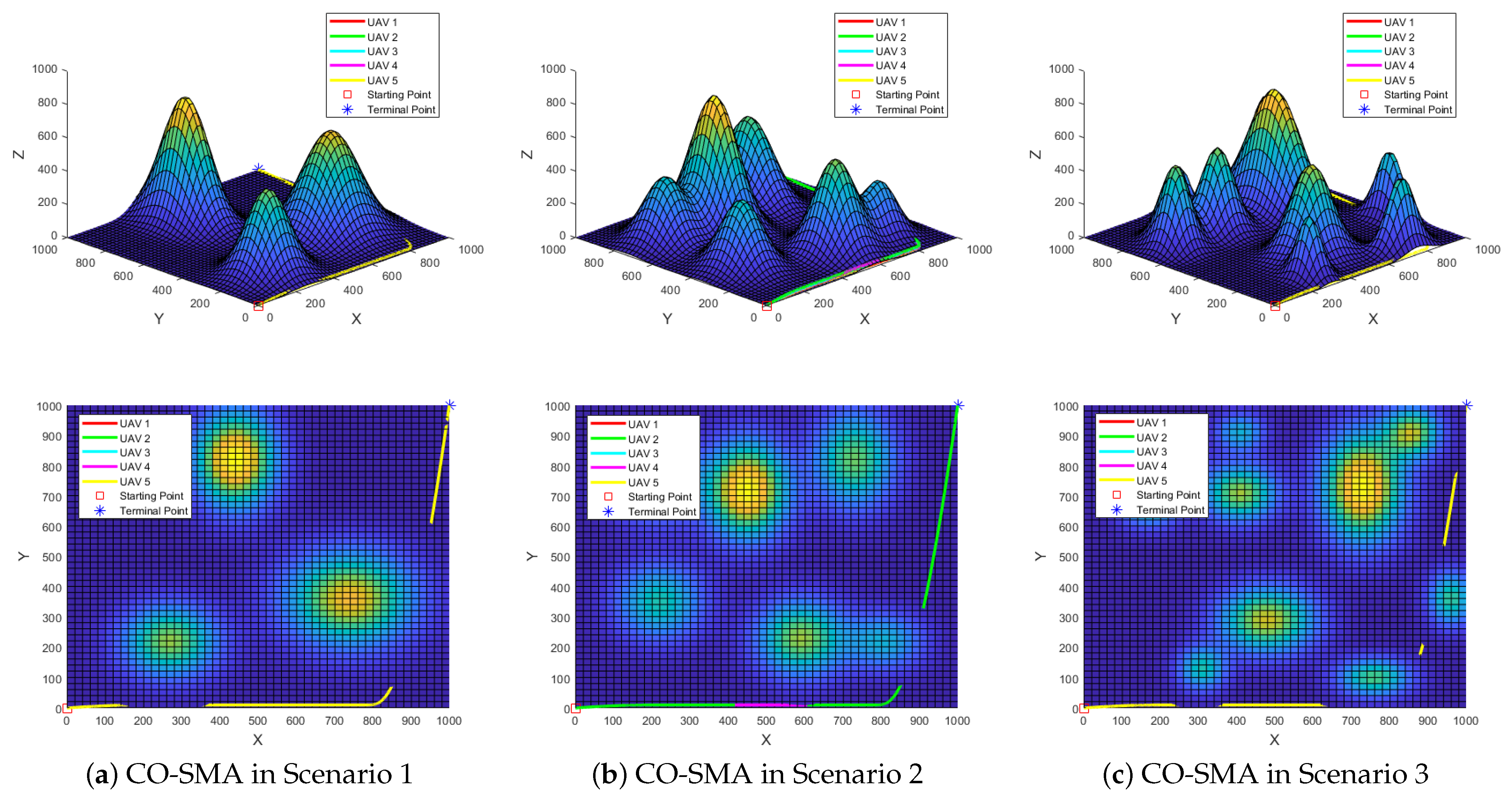
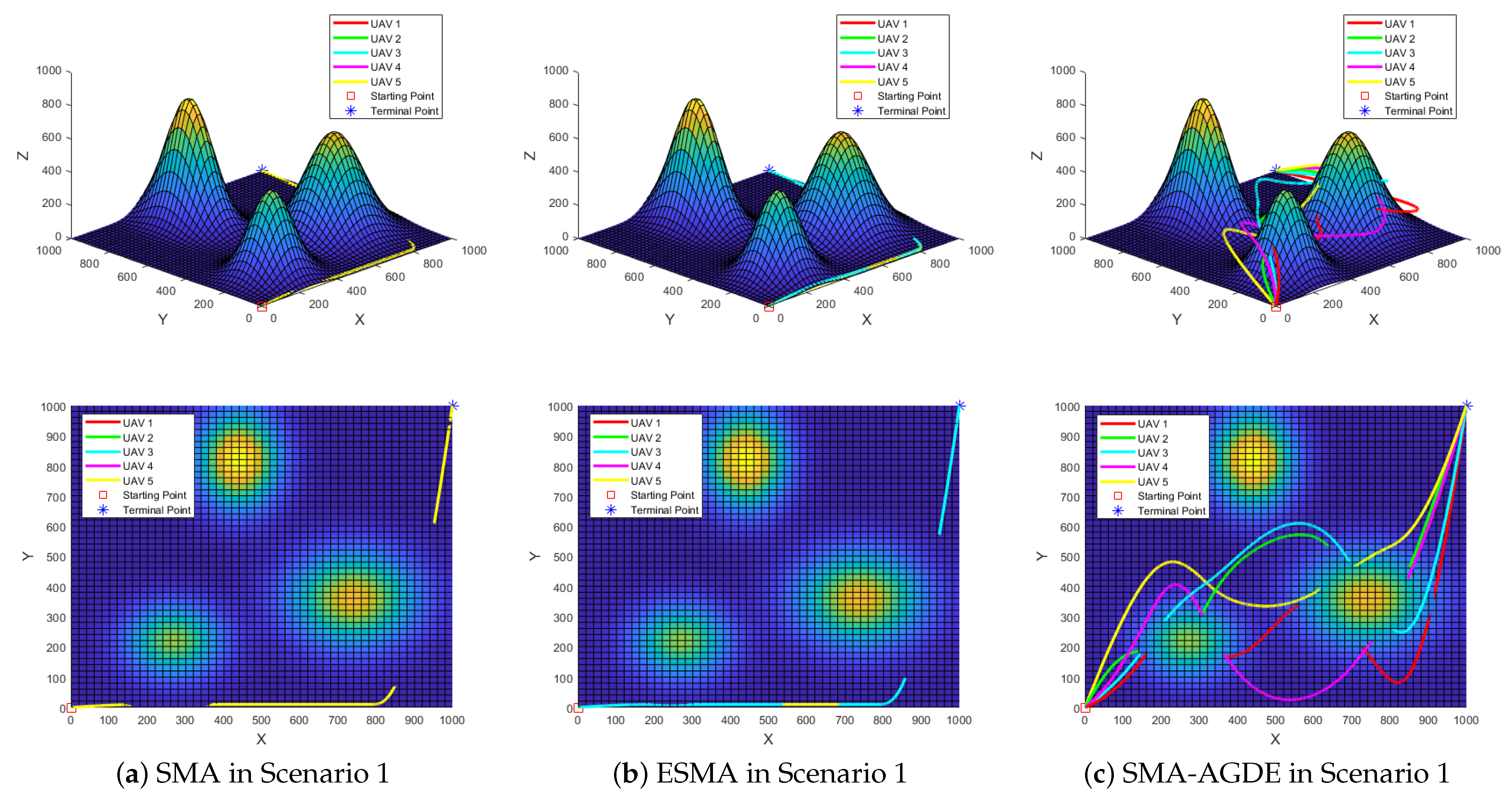
Figure 10 and
Figure 11 display the best path-planning outcomes for the three-dimensional and two-dimensional views of AI-SMA and CO-SMA, respectively. The SMA, ESMA, and SMA-AGDE plots are provided in
Appendix B. The red square indicates the starting point in these figures, while the blue star signifies the terminal point. Notably, in the two-dimensional plot, continuous curves indicate collision-free trajectories for UAVs, whereas any discontinuities highlight potential collision points. If a single curve is displayed, it indicates that the trajectories of all UAVs coincide.
In Scenario 1 with three obstacles, AI-SMA exhibits enhanced robustness, as evidenced by achieving optimal standard deviation and second-highest average fitness value among the evaluated algorithms in
Table 7.
Figure 9a confirms its competitive convergence performance, ranking second among the five algorithms. Trajectory results in
Figure 11a and
Figure A2a,b reveal that CO-SMA, SMA, and ESMA generate nearly identical flight trajectories for all UAVs, leading to UAV collisions at each waypoint due to insufficient safety distance. Additionally, two significant breaks in these curves indicate that all UAVs will experience severe collisions with obstacles. While SMA-AGDE avoids inter-UAV collisions, as shown in
Figure A2c, it fails to prevent critical collisions with two obstacles. In contrast, AI-SMA generates collision-free trajectories for all UAVs except for a minor collision between UAV3 and one obstacle, as shown in
Figure 10a. Therefore, AI-SMA is recognized as the best-performing algorithm in Scenario 1.
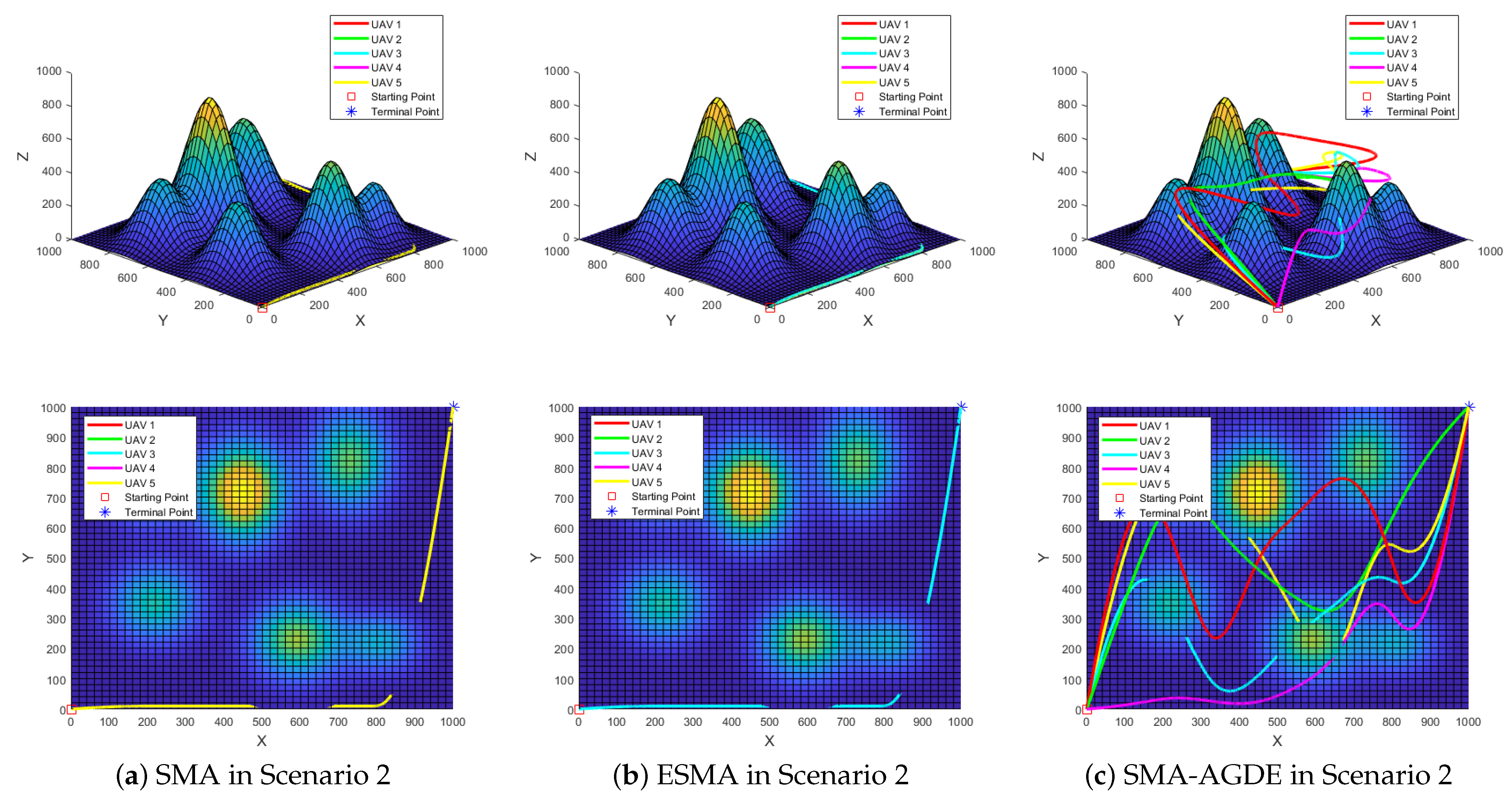
Compared to Scenario 1, Scenario 2 presents more obstacles and greater challenges. The results shown in
Table 7 and
Figure 9b indicate that AI-SMA performs best in this scenario. Specifically, AI-SMA achieves the best average fitness and standard deviation, along with superior convergence effectiveness. AI-SMA also successfully generates collision-free flight trajectories for all UAVs, as shown in
Figure 10b. Conversely, UAV flight trajectories generated by the other four algorithms, as illustrated in
Figure 11b and
Figure A3a–c, are not feasible and will collide with obstacles. Consequently, the performance of AI-SMA in Scenario 2 is optimal as well.
Scenario 3 is the most complex, featuring the highest number and density of obstacles. As shown in
Table 7 and
Figure 9c, AI-SMA achieves the best standard deviation and second place in average fitness and convergence behavior, indicating that the algorithm remains robust even in the most complex scenarios. Furthermore,
Figure 11c and
Figure A4a–c demonstrate that the UAV flight trajectories generated by CO-SMA, SMA, ESMA, and SMA-AGDE are invalid, with an increase in collision points as scene complexity rises. Only AI-SMA, depicted in
Figure 10c, produces complete, flyable, and collision-free flight trajectories, showcasing the excellent performance of the algorithm in Scenario 3.
Overall, the experimental results for multi-UAV path planning demonstrate that the proposed AI-SMA exhibits superior convergence properties, consistently ranking among the top two algorithms for both convergence speed and overall performance in all tested scenarios. Regarding robustness, AI-SMA achieves the best average fitness and standard deviation across varying densities of obstacles and terrains while generating flyable trajectories. Notably, AI-SMA is the only algorithm capable of producing collision-free trajectories for all UAVs in every scenario, while other algorithms often fail to generate feasible paths, leading to collisions with obstacles or other UAVs. Therefore, AI-SMA outperforms competing algorithms in terms of convergence effectiveness, robustness, and collision avoidance.
These advantages make AI-SMA particularly well-suited for real-world multi-UAV applications, such as search and rescue missions in mountainous terrains or firefight operations in densely populated urban environments, where reliable obstacle avoidance and robust performance are critical.
5.3. Strategy Validity Analysis
The proposed AI-SMA incorporates three strategies to improve the performance of SMA. To validate the effectiveness of each improvement, experiments were conducted on representative benchmark functions from CEC 2017 and Scenario 2 of multi-UAV path-planning problems. The following algorithms were considered for the experiment:
SMA: the original SMA;
SMA_S1: SMA with a novel search mechanism;
SMA_S2: SMA with a self-adaptive switch operator;
SMA_S3: SMA with a self-adaptive perturbation strategy;
AI-SMA: SMA incorporating all three strategies.
All experimental settings and evaluation metrics remain consistent with
Section 5.1.1 and
Section 5.2. The experimental results for SMA, SMA_S1, SMA_S2, SMA_S3, and AI-SMA over 30 runs are summarized in
Table 8. The comparative effectiveness and the path-planning outcomes are illustrated in
Figure 12 and
Figure 13, respectively.
The results presented in
Table 8 indicate that SMA_S1, which employs a novel search mechanism, achieves the best average fitness and standard deviation on
in the CEC test suite. Moreover, its best fitness is superior to SMA on
,
,
,
, and
. SMA_S2 and SMA_S3, which utilize a self-adaptive switch operator and a self-adaptive perturbation strategy, demonstrate improved average fitness and standard deviation compared to the original SMA in Scenario 2. These findings demonstrate that the three enhancement strategies proposed in this paper contribute to varying degrees of numerical improvement in the performance of SMA.
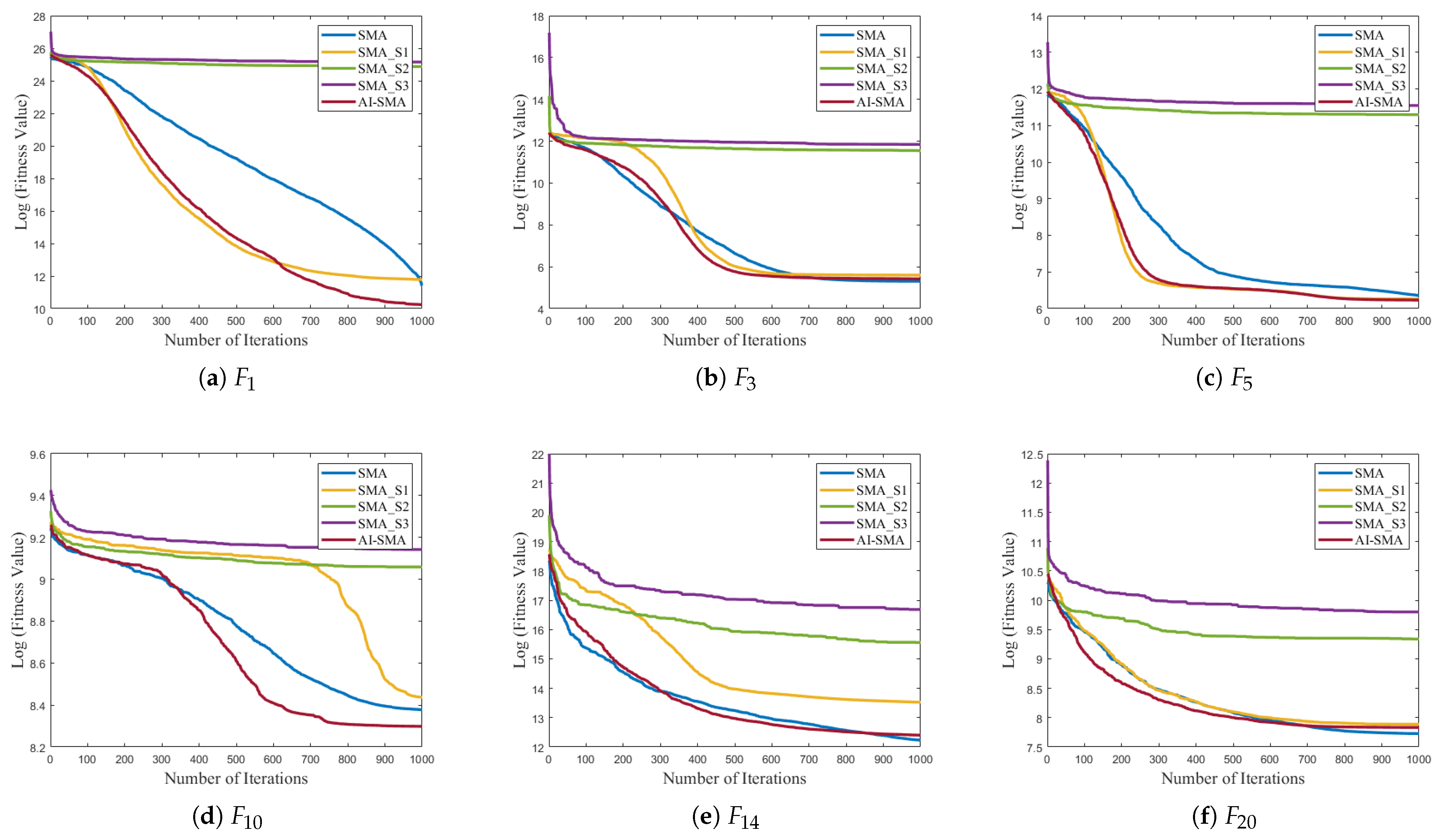
Regarding convergence performance,
Figure 12 illustrates that the convergence speed and effectiveness of SMA_S1 on
,
,
,
, and Scenario 2 are superior to SMA. Although the advantages of SMA_S2 and SMA_S3 are less pronounced in the CEC 2017 benchmark functions, both exhibit better convergence performance than SMA in Scenario 2 from the multi-UAV path-planning problems.
Figure 13a,b demonstrate that SMA_S1 and SMA_S2 can generate viable flight trajectories for the majority of UAVs. Despite some collisions within the paths, they represent a substantial advancement compared to the completely non-flyable trajectories produced by SMA, as shown in
Figure A3a.
Figure 13c illustrates that SMA_S3 offers limited assistance in generating a flyable path, primarily due to the inherent weak exploration capability of SMA, which restricts the effectiveness of the self-adaptive perturbation strategy. Nevertheless, the numerical and convergence analysis results collectively indicate that SMA_S3 enhances the effectiveness of SMA.
To sum up, the three strategies introduced in this paper have improved the exploration capabilities, convergence speed, and path-planning efficiency of the original SMA to some extent. After integrating the three strategies, the performance of AI-SMA proves to be superior to SMA in the CEC 2017 test suite and multi-UAV path-planning issues.
5.4. Parameter Experiments
AI-SMA has two key parameters: the Crossover Rate
and the Perturbation Rate
.
controls the position update patterns of individuals in the novel search mechanism, as expressed in Equation (
33).
denotes the population percentage that needs to be eliminated in the self-adaptive perturbation strategy, as shown in Equation (
36).
In the proposed novel search mechanism, it is intended that most individuals locate the optimal value through positive–negative feedback related to food concentration, which aligns with the natural behavior of slime molds. Consequently, the minimum value of is set at 0.5. Additionally, to ensure that the integrated rank-DE mutation strategy contributes to the exploitation process, the maximum value of is set at 0.8.
Regarding the self-adaptive perturbation strategy, it is intended to avoid making large-scale adjustments to the population structure, so the value for is established between 0.1 and 0.2. This means the perturbation strategy will eliminate and update the worst-performing to of individuals.
Considering the requirements above, 8 parameter combinations were tested on the CEC 2017 benchmark test suite over 30 independent runs. The optimal combinations were selected based on rankings from the Friedman test. For parameter experiments, the population size (
) and problem dimension (
) are set as 30, and the maximum iteration limitation (
) is configured to 1000. The Friedman test results are listed in
Table 9, with complete numerical results provided in
Table A1 in
Appendix C. The table column names are denoted as
.
Table 9 shows that the parameter combination of
and
ranked first among all combinations, making it the optimal choice for subsequent experiments.
6. Conclusions
This study proposes a self-adaptive improved slime mold algorithm (AI-SMA) to address the limitations of the original SMA and apply it to multi-UAV path-planning problems. Initially, to balance exploration and exploitation phases, a novel search mechanism is introduced that utilizes the robust exploration capabilities of rank-DE while enhancing the exploitation strengths of SMA. Next, a self-adaptive switch operator S replaced the fixed parameter z to ensure population diversity in later iterations and help prevent premature convergence. Lastly, a self-adaptive perturbation strategy is implemented to assist the algorithm in escaping local optima and to accelerate its convergence speed. The cubic B-spline curves are applied to smooth the flight trajectories produced by AI-SMA, further improving their feasibility.
The performance of AI-SMA is evaluated on the CEC 2017 benchmark test suite and three multi-UAV path-planning scenarios. Simulation results demonstrate that AI-SMA surpasses seven competitive meta-heuristic algorithms on the benchmark functions, achieving superior performance in optimal fitness value and convergence speed. In particular, AI-SMA improves approximately in the quality of optimal fitness over the original SMA. Compared to SMA and its three variants, AI-SMA exhibits enhanced convergence speed and robustness, and it is the only algorithm capable of generating collision-free trajectories. Furthermore, an analysis of computational complexity indicates that AI-SMA has a complexity similar to SMA. Strategy validity experiments also confirm that each of the three enhancements significantly improves the performance of SMA.
Beyond these immediate performance benefits, the findings of this study have broader implications for multi-UAV path-planning challenges. The capability of AI-SMA to generate collision-free trajectories creates new opportunities for UAV operations in complex and unstructured settings, such as disaster response and geological exploration. However, AI-SMA still has limitations compared to other meta-heuristic algorithms. For instance, the exploration method in the novel search mechanism relies on random distribution without enhancements, which may lead to longer search times for global optima. The self-adaptive perturbation strategy shows limited effectiveness in escaping local optima for multi-modal functions. Further improvements can focus on these areas to accelerate convergence speed and enhance effectiveness.
In addition, integrating AI-SMA with real-world unmanned aircraft systems presents a promising direction for future research. Transitioning from simulation to practical applications will pose challenges such as UAV battery power consumption, hardware adaptation, sensor accuracy, and communication limitations. Overcoming these challenges will enable more effective solutions to complex multi-UAV path-planning problems in real-world scenarios. This advancement will significantly enhance the applicability of AI-SMA in critical applications such as precision agriculture, traffic management, and industrial inspection.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}