
Effects of Tank-Mix Adjuvants on Spray Performance Under Downwash Airflow Fields Using an Indoor Simulated UASS Spraying Platform

 , ,
, ,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Spray Solution
2.2. Physiochemical Properties Characterization
2.3. Droplet Size Spectrum Measurement
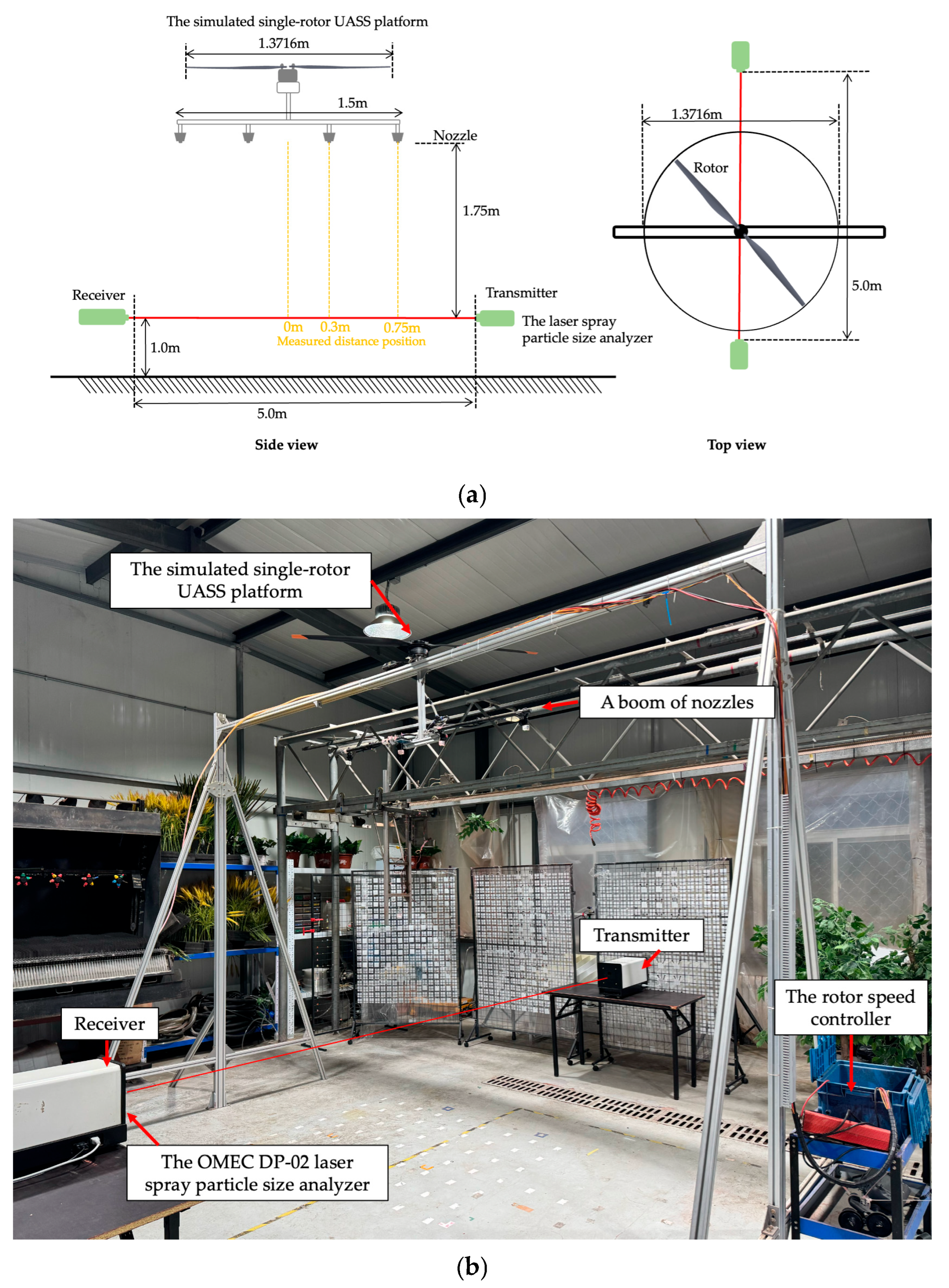
2.3.1. Single-Rotor Downwash Airflow Field
2.3.2. Multi-Rotor Downwash Airflow Field
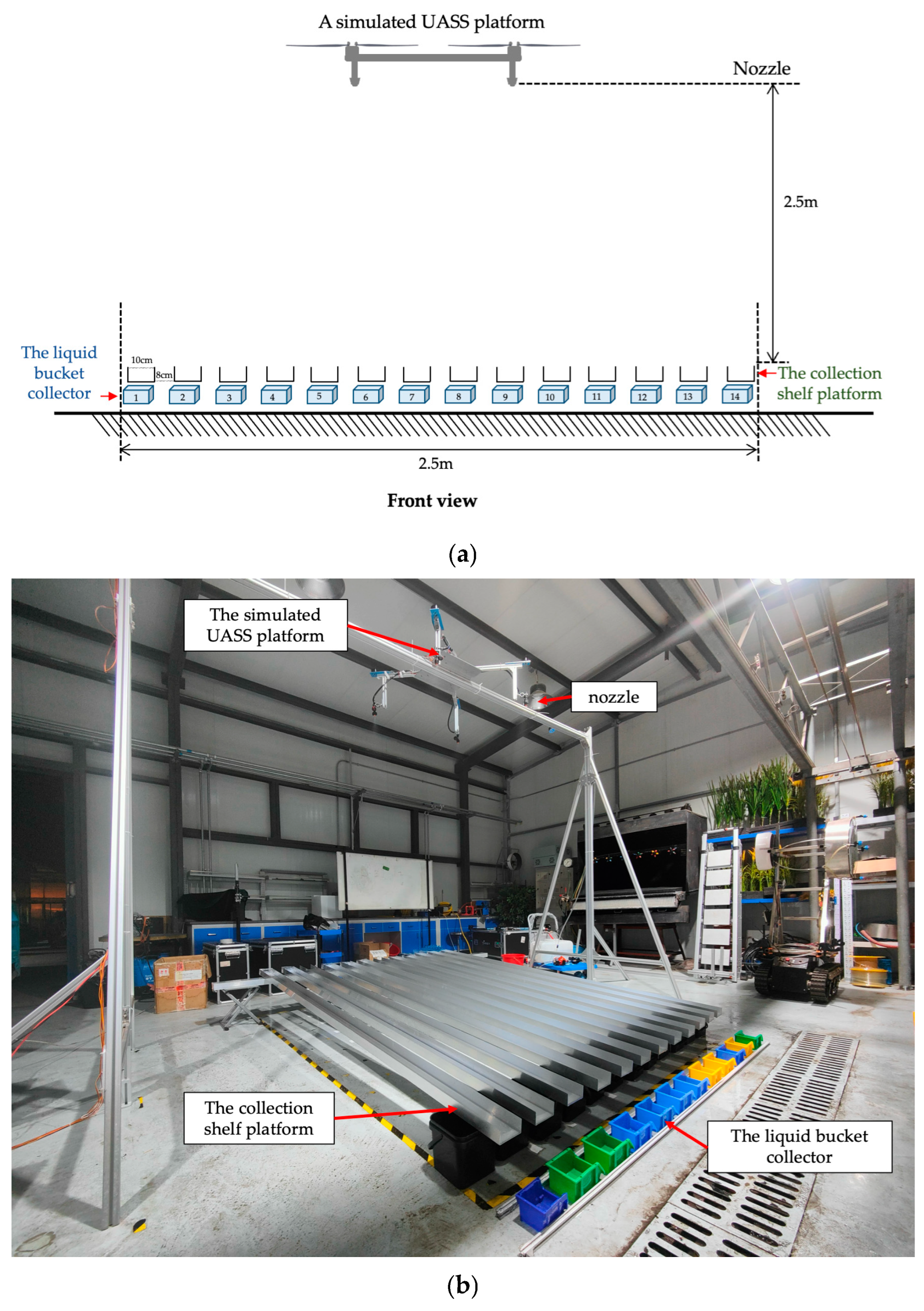
2.4. Spray Distribution Uniformity Measurement
2.5. Statistical Analyses
3. Results
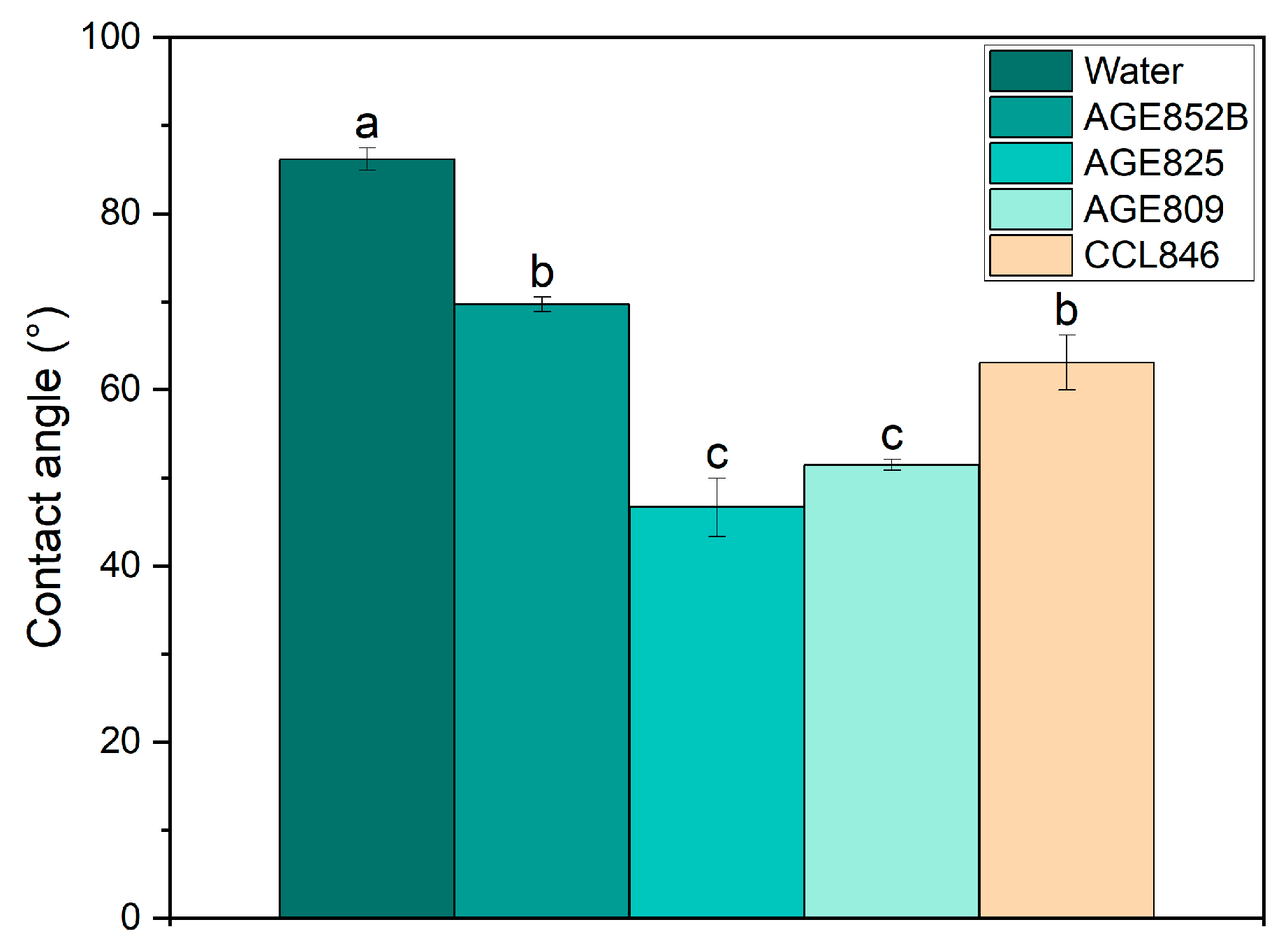
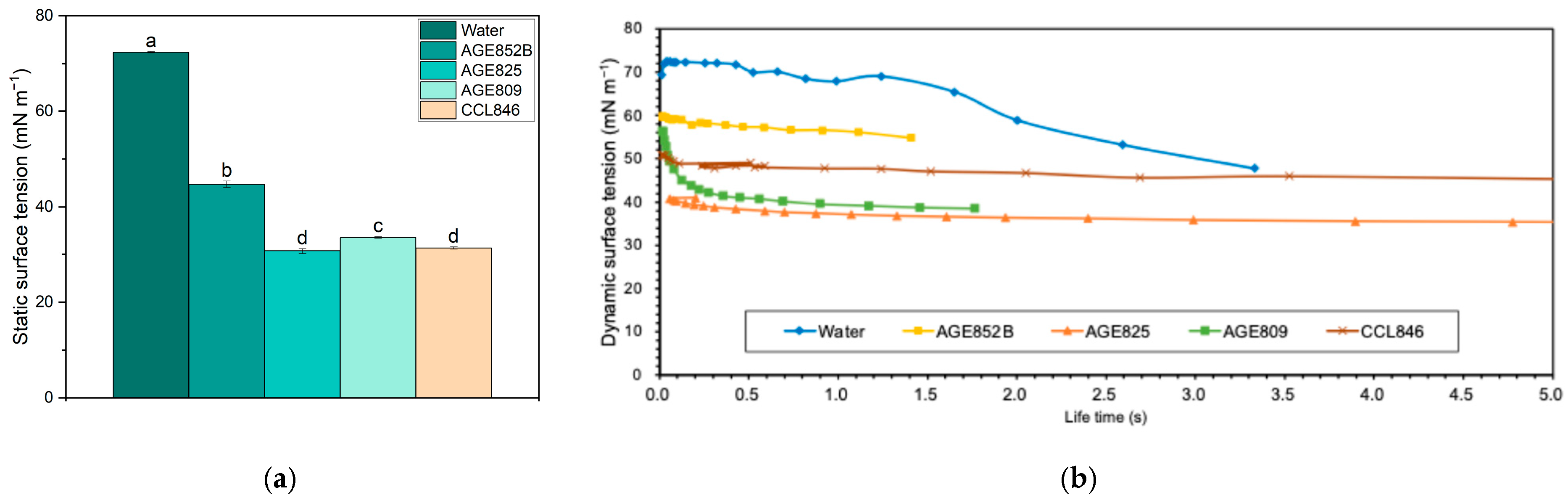
3.1. Physicochemical Properties
3.2. Droplet Size Spectrum
3.2.1. Single-Rotor UASS Platform
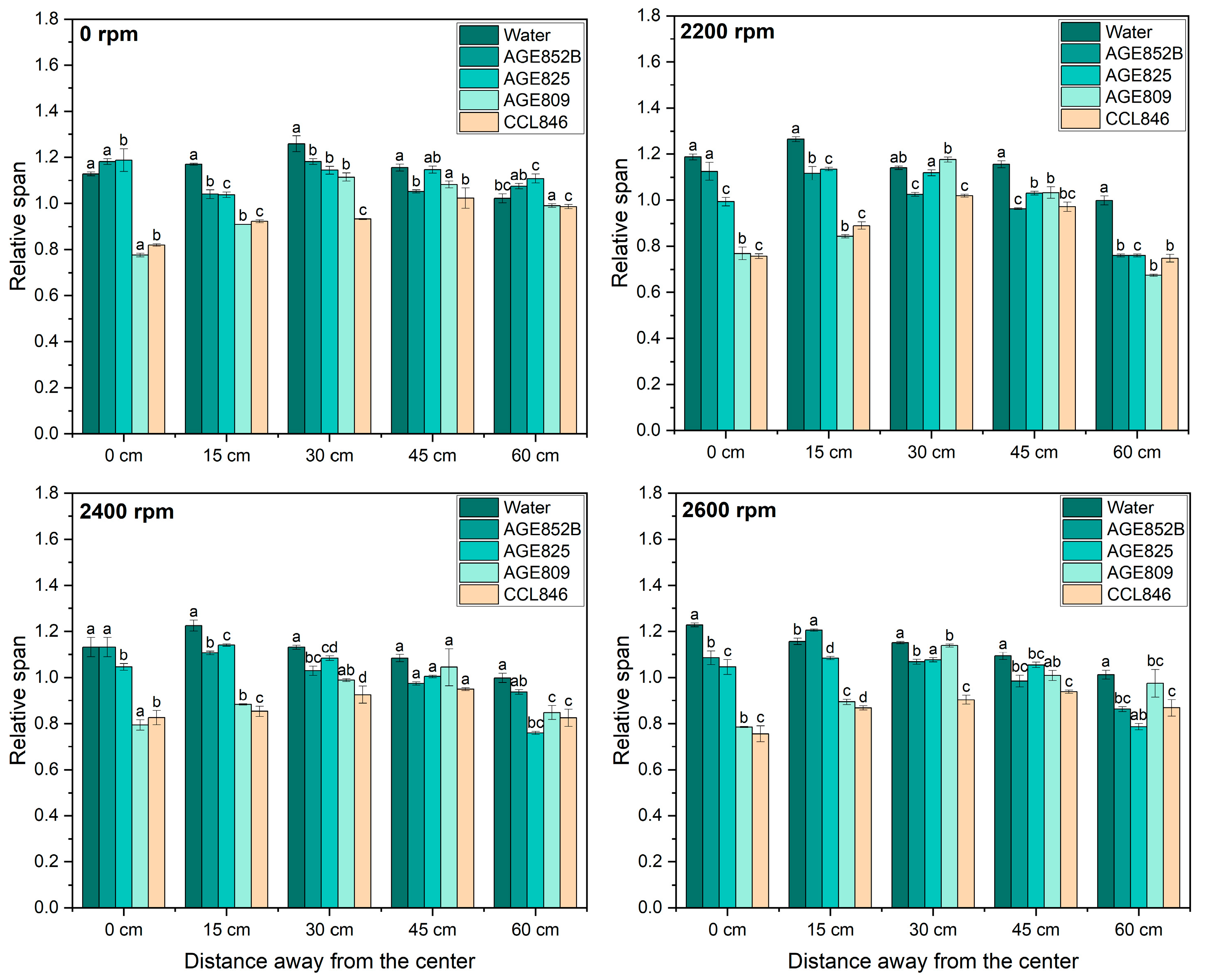
3.2.2. Multi-Rotor UASS Platform
3.3. Spray Distribution Uniformity
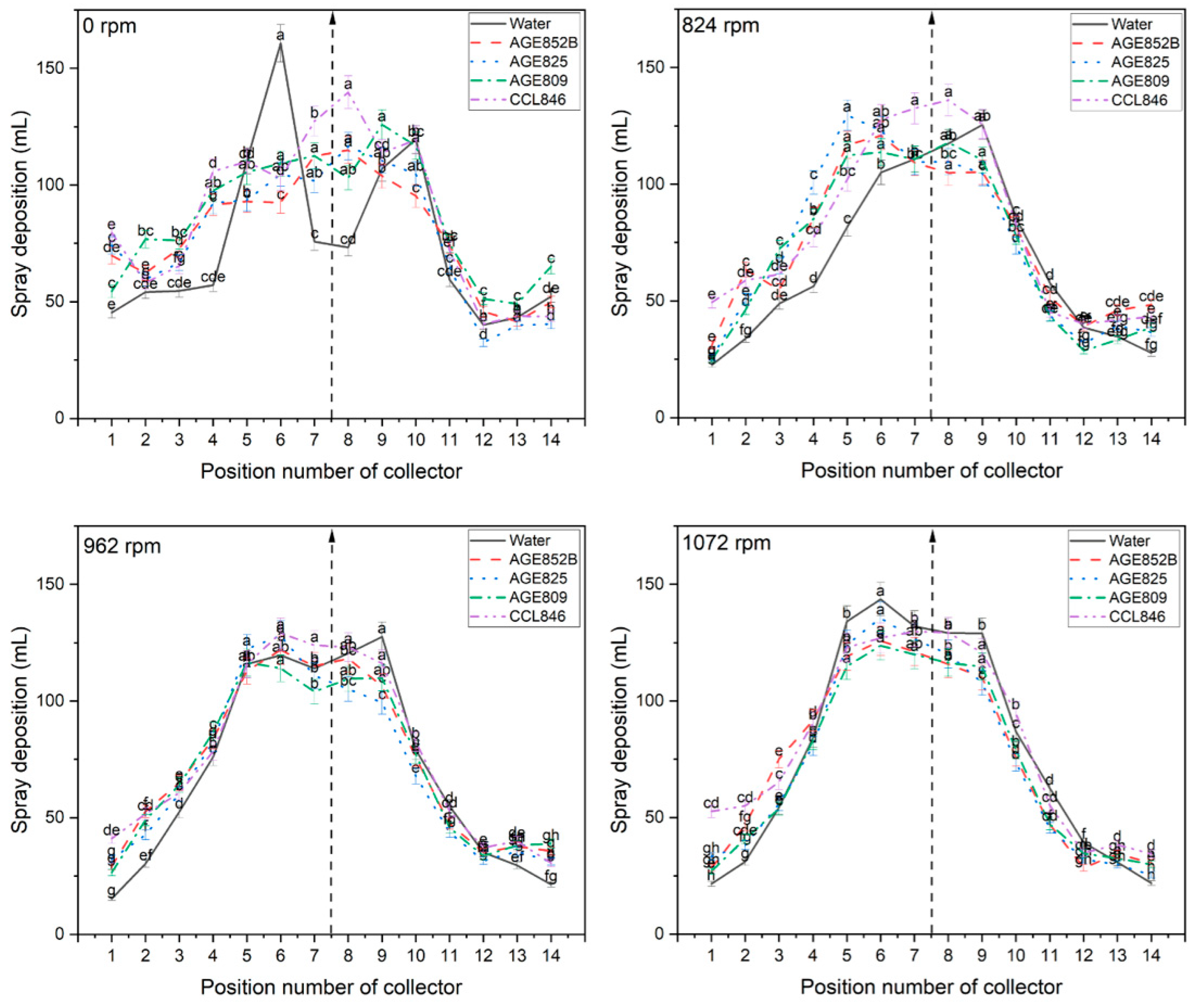
3.3.1. Single-Rotor UASS Platform
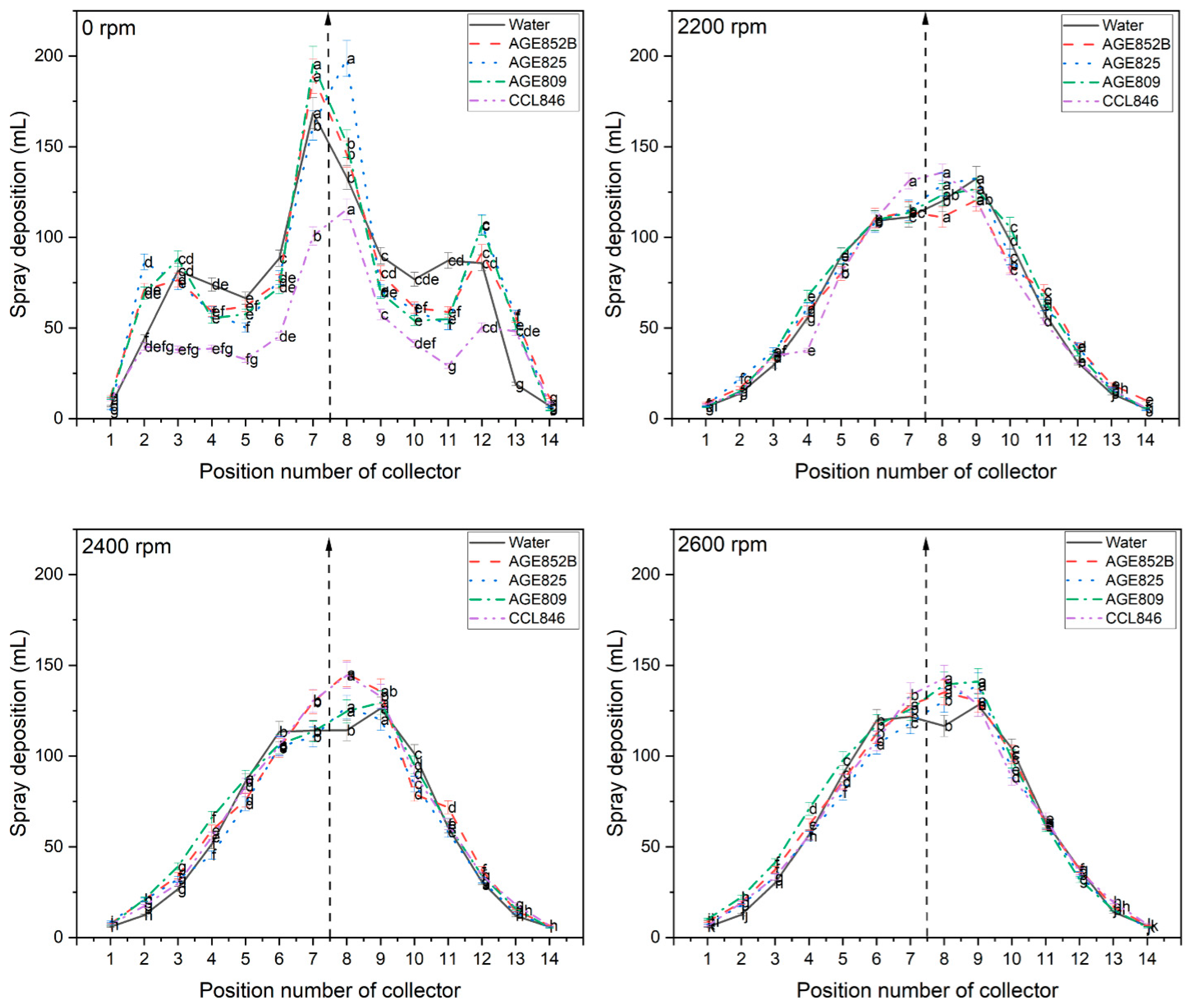
3.3.2. Multi-Rotor UASS Platform
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Treatment | D * (cm) | Droplet Size (µm) in Different Rotor Speeds | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 rpm | 824 rpm | 962 rpm | 1072 rpm | ||||||||||||||||||
| DV10 | DV50 | DV90 | V100 | V200 | DV10 | DV50 | DV90 | V100 | V200 | DV10 | DV50 | DV90 | V100 | V200 | DV10 | DV50 | DV90 | V100 | V200 | ||
| Water | 0 | 84.17 | 126.06 | 192.42 | 27.47 | 67.37 | 82.40 | 124.27 | 201.99 | 30.02 | 66.09 | 78.88 | 113.60 | 175.48 | 35.32 | 78.47 | 80.11 | 112.04 | 179.69 | 36.39 | 77.85 |
| 30 | 84.27 | 154.04 | 216.07 | 22.84 | 47.76 | 84.87 | 125.22 | 193.20 | 28.14 | 67.39 | 84.43 | 121.34 | 180.92 | 28.79 | 73.47 | 82.91 | 124.53 | 191.08 | 27.68 | 70.17 | |
| 75 | 85.95 | 137.31 | 208.09 | 24.79 | 56.60 | 96.79 | 158.46 | 222.56 | 11.53 | 42.75 | 97.17 | 163.05 | 236.01 | 11.24 | 39.41 | 99.58 | 163.18 | 232.19 | 10.26 | 39.15 | |
| AGE852B | 0 | 87.68 | 166.83 | 228.07 | 19.70 | 38.24 | 87.09 | 153.30 | 219.94 | 21.19 | 48.17 | 97.44 | 164.46 | 228.03 | 11.18 | 37.45 | 86.77 | 154.09 | 228.90 | 20.36 | 47.35 |
| 30 | 88.98 | 163.24 | 220.41 | 17.68 | 39.09 | 85.58 | 126.27 | 194.29 | 26.11 | 68.06 | 83.43 | 151.99 | 227.01 | 21.89 | 48.65 | 82.22 | 141.24 | 267.48 | 22.60 | 55.24 | |
| 75 | 87.14 | 157.60 | 224.05 | 20.62 | 44.95 | 94.64 | 161.00 | 214.53 | 13.25 | 39.72 | 102.39 | 176.68 | 235.25 | 10.09 | 29.42 | 107.62 | 180.17 | 238.56 | 9.22 | 26.94 | |
| AGE825 | 0 | 86.28 | 129.83 | 192.11 | 24.61 | 65.70 | 83.95 | 116.96 | 185.55 | 32.27 | 70.67 | 88.94 | 136.78 | 192.08 | 20.34 | 59.82 | 86.02 | 137.18 | 209.35 | 20.40 | 60.71 |
| 30 | 87.27 | 149.52 | 200.46 | 20.23 | 50.45 | 85.87 | 125.06 | 226.99 | 24.12 | 70.38 | 91.70 | 149.68 | 310.49 | 15.73 | 50.54 | 85.30 | 146.97 | 304.38 | 20.50 | 51.58 | |
| 75 | 87.40 | 157.02 | 214.20 | 19.85 | 44.49 | 106.55 | 160.64 | 210.78 | 8.09 | 38.66 | 121.23 | 174.52 | 234.70 | 3.94 | 27.54 | 118.71 | 178.04 | 241.47 | 4.60 | 26.95 | |
| AGE809 | 0 | 88.18 | 170.71 | 230.15 | 19.54 | 44.98 | 92.84 | 176.78 | 279.32 | 13.61 | 36.35 | 88.07 | 162.42 | 260.96 | 16.95 | 42.84 | 91.80 | 194.48 | 323.27 | 14.75 | 34.76 |
| 30 | 89.85 | 171.72 | 233.08 | 11.91 | 28.94 | 92.30 | 176.67 | 241.27 | 14.24 | 33.26 | 92.15 | 162.38 | 224.52 | 14.53 | 40.36 | 89.11 | 158.86 | 228.60 | 17.55 | 44.09 | |
| 75 | 91.94 | 173.97 | 233.70 | 16.18 | 34.98 | 106.27 | 166.60 | 216.44 | 8.24 | 33.17 | 125.64 | 181.25 | 234.24 | 4.59 | 22.13 | 133.01 | 185.20 | 238.33 | 3.33 | 18.89 | |
| CCL846 | 0 | 89.69 | 168.65 | 230.46 | 16.96 | 38.54 | 96.28 | 192.61 | 514.33 | 11.53 | 29.21 | 90.24 | 170.33 | 237.47 | 15.91 | 37.52 | 89.92 | 170.44 | 259.94 | 15.91 | 38.41 |
| 30 | 123.81 | 198.39 | 268.62 | 5.13 | 18.96 | 106.64 | 184.53 | 241.44 | 9.03 | 24.09 | 94.04 | 176.40 | 233.20 | 13.05 | 30.43 | 91.72 | 179.53 | 239.14 | 14.45 | 30.03 | |
| 75 | 92.18 | 180.70 | 236.06 | 14.18 | 29.40 | 105.70 | 178.22 | 235.18 | 8.45 | 28.15 | 122.58 | 180.44 | 233.47 | 4.87 | 22.29 | 119.57 | 181.84 | 235.37 | 5.52 | 23.14 | |
| Treatment | D * (cm) | Droplet Size (µm) in Different Rotor Speeds | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 rpm | 2200 rpm | 2400 rpm | 2600 rpm | ||||||||||||||||||
| DV10 | DV50 | DV90 | V100 | V200 | DV10 | DV50 | DV90 | V100 | V200 | DV10 | DV50 | DV90 | V100 | V200 | DV10 | DV50 | DV90 | V100 | V200 | ||
| Water | 0 | 84.72 | 165.33 | 271.27 | 5.69 | 12.18 | 81.20 | 173.14 | 286.77 | 5.09 | 11.65 | 91.25 | 182.40 | 297.07 | 3.78 | 12.04 | 74.84 | 160.37 | 271.67 | 5.47 | 11.31 |
| 15 | 84.11 | 170.49 | 283.62 | 4.97 | 11.66 | 73.15 | 141.72 | 252.21 | 8.55 | 9.59 | 75.95 | 147.88 | 257.18 | 6.84 | 10.43 | 79.76 | 154.38 | 258.33 | 6.60 | 11.19 | |
| 30 | 76.22 | 150.04 | 264.63 | 7.79 | 10.19 | 77.55 | 136.60 | 233.35 | 9.91 | 9.13 | 74.05 | 133.88 | 225.57 | 9.52 | 8.56 | 74.18 | 135.08 | 229.72 | 9.35 | 8.85 | |
| 45 | 80.99 | 140.70 | 243.59 | 10.09 | 9.63 | 80.99 | 140.70 | 243.59 | 10.09 | 9.63 | 81.36 | 148.63 | 242.53 | 7.58 | 11.14 | 80.78 | 146.57 | 241.07 | 8.84 | 10.76 | |
| 60 | 84.87 | 153.87 | 241.93 | 7.20 | 12.23 | 103.35 | 202.75 | 305.63 | 2.84 | 13.21 | 103.35 | 202.75 | 305.63 | 2.84 | 13.21 | 100.96 | 203.76 | 307.00 | 1.91 | 13.27 | |
| AGE852B | 0 | 83.14 | 168.02 | 281.64 | 5.60 | 11.54 | 92.69 | 184.13 | 299.53 | 3.77 | 12.18 | 91.25 | 182.40 | 297.07 | 3.78 | 12.04 | 93.32 | 187.42 | 296.48 | 3.62 | 12.21 |
| 15 | 85.63 | 157.09 | 249.06 | 6.61 | 12.49 | 89.45 | 163.88 | 272.23 | 4.99 | 12.28 | 88.12 | 160.06 | 265.26 | 5.08 | 12.06 | 86.85 | 164.65 | 285.39 | 4.59 | 11.73 | |
| 30 | 83.14 | 168.02 | 281.64 | 5.60 | 11.54 | 83.97 | 145.41 | 232.93 | 8.28 | 11.20 | 88.14 | 152.84 | 245.43 | 6.15 | 11.92 | 84.97 | 148.43 | 243.43 | 6.74 | 11.06 | |
| 45 | 89.63 | 149.64 | 247.00 | 10.17 | 10.44 | 88.31 | 149.42 | 232.20 | 7.17 | 11.93 | 89.11 | 151.84 | 237.06 | 6.32 | 12.25 | 90.26 | 155.14 | 243.01 | 5.97 | 12.59 | |
| 60 | 86.72 | 157.84 | 256.20 | 5.50 | 12.17 | 128.98 | 202.27 | 282.72 | 1.73 | 16.09 | 119.43 | 209.18 | 315.66 | 2.10 | 13.46 | 122.48 | 212.15 | 305.25 | 1.81 | 13.44 | |
| AGE825 | 0 | 107.72 | 172.10 | 241.24 | 4.35 | 16.79 | 116.86 | 186.98 | 260.44 | 2.88 | 17.66 | 116.52 | 187.10 | 265.07 | 2.87 | 17.00 | 119.22 | 188.77 | 267.47 | 2.47 | 17.17 |
| 15 | 98.22 | 163.88 | 247.35 | 7.12 | 13.61 | 100.89 | 162.56 | 237.88 | 6.18 | 15.05 | 100.91 | 170.92 | 251.72 | 5.94 | 15.15 | 99.90 | 170.04 | 251.85 | 6.26 | 15.08 | |
| 30 | 98.06 | 164.53 | 281.36 | 7.21 | 9.91 | 96.27 | 155.81 | 279.57 | 6.95 | 10.53 | 106.19 | 192.52 | 296.54 | 4.52 | 11.01 | 96.00 | 153.05 | 270.31 | 7.73 | 10.44 | |
| 45 | 95.96 | 162.37 | 271.47 | 7.32 | 11.89 | 98.30 | 161.46 | 265.04 | 6.35 | 12.50 | 97.42 | 157.23 | 261.90 | 6.73 | 12.33 | 100.05 | 164.15 | 265.72 | 6.02 | 12.80 | |
| 60 | 89.33 | 164.21 | 252.00 | 7.46 | 13.79 | 128.70 | 190.76 | 257.18 | 2.02 | 19.52 | 118.20 | 195.19 | 283.92 | 2.85 | 15.52 | 114.01 | 198.46 | 308.19 | 3.29 | 13.85 | |
| AGE809 | 0 | 100.67 | 200.62 | 339.90 | 3.20 | 11.11 | 108.10 | 204.24 | 310.75 | 2.66 | 12.47 | 104.03 | 197.76 | 310.64 | 3.06 | 12.24 | 101.17 | 197.69 | 307.54 | 3.10 | 12.09 |
| 15 | 105.40 | 207.98 | 320.94 | 3.06 | 11.24 | 95.34 | 186.75 | 307.33 | 3.49 | 11.81 | 93.68 | 182.65 | 302.19 | 3.48 | 11.79 | 98.15 | 187.56 | 301.30 | 3.47 | 12.04 | |
| 30 | 99.68 | 197.68 | 325.87 | 3.66 | 11.39 | 89.44 | 166.84 | 276.13 | 4.65 | 12.40 | 90.03 | 164.20 | 267.88 | 5.06 | 12.56 | 91.52 | 165.42 | 269.57 | 4.76 | 12.70 | |
| 45 | 92.40 | 190.66 | 311.04 | 4.37 | 10.91 | 95.87 | 171.62 | 272.49 | 4.47 | 13.00 | 93.77 | 168.45 | 262.99 | 5.01 | 13.44 | 96.33 | 170.06 | 275.59 | 4.41 | 12.95 | |
| 60 | 97.00 | 184.02 | 301.01 | 3.96 | 12.05 | 128.98 | 202.27 | 282.72 | 1.73 | 16.09 | 133.66 | 206.78 | 290.75 | 1.31 | 15.75 | 137.75 | 214.13 | 306.10 | 1.15 | 14.67 | |
| CCL846 | 0 | 114.33 | 198.55 | 276.92 | 3.26 | 14.79 | 123.39 | 206.26 | 279.49 | 1.93 | 15.35 | 128.81 | 211.42 | 303.46 | 1.65 | 14.37 | 128.33 | 208.42 | 286.01 | 1.51 | 15.36 |
| 15 | 113.36 | 208.23 | 305.47 | 3.49 | 11.00 | 113.90 | 200.58 | 292.30 | 3.50 | 13.59 | 119.45 | 207.74 | 296.61 | 2.87 | 13.64 | 121.64 | 211.55 | 305.09 | 2.58 | 13.02 | |
| 30 | 108.95 | 217.95 | 312.25 | 4.17 | 8.79 | 104.18 | 189.60 | 297.25 | 5.03 | 10.64 | 107.34 | 183.18 | 276.16 | 4.46 | 13.90 | 107.14 | 185.74 | 274.74 | 3.96 | 13.44 | |
| 45 | 104.60 | 202.95 | 310.93 | 5.14 | 9.10 | 105.42 | 188.35 | 288.40 | 4.48 | 12.25 | 106.29 | 185.63 | 282.68 | 4.39 | 12.83 | 106.65 | 186.39 | 281.68 | 4.26 | 12.81 | |
| 60 | 89.55 | 167.18 | 254.39 | 7.62 | 14.17 | 131.44 | 206.53 | 286.04 | 1.74 | 15.49 | 123.32 | 205.21 | 292.77 | 2.52 | 14.56 | 124.10 | 212.03 | 308.76 | 2.47 | 13.40 | |
References
- He, X.; Bonds, J.; Herbst, A.; Langenakens, J. Recent Development of Unmanned Aerial Vehicle for Plant Protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.F.; Krishnamachari, B.; Ueyama, J. An Adaptive Approach for UAV-Based Pesticide Spraying in Dynamic Environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Wang, G.; Li, X.; Andaloro, J.; Chen, P.; Song, C.; Shan, C.; Chen, S.; Lan, Y. Deposition and Biological Efficacy of UAV-Based Low-Volume Application in Rice Fields. Int. J. Precis. Agric. Aviat. 2018, 1, 65–72. [Google Scholar] [CrossRef]
- Hu, P.; Zhang, R.; Yang, J.; Chen, L. Development Status and Key Technologies of Plant Protection UAVs in China: A Review. Drones 2022, 6, 354. [Google Scholar] [CrossRef]
- Giles, D.K.; Billing, R.C. Deployment and Performance of a UAV for Crop Spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar] [CrossRef]
- Sánchez-Fernández, L.; Barrera, M.; Martínez-Guanter, J.; Pérez-Ruiz, M. Drift Reduction in Orchards through the Use of an Autonomous UAV System. Comput. Electron. Agric. 2023, 211, 107981. [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Wang, S.; Li, L.; Bonds, J.; Herbst, A.; Wang, Z. Testing Method and Distribution Characteristics of Spatial Pesticide Spraying Deposition Quality Balance for Unmanned Aerial Vehicle. Int. J. Agric. Biol. Eng. 2018, 11, 18–26. [Google Scholar] [CrossRef]
- Wang, S.; Song, J.; He, X.; Song, L.; Wang, X.; Wang, C.; Wang, Z.; Ling, Y. Performances Evaluation of Four Typical Unmanned Aerial Vehicles Used for Pesticide Application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar] [CrossRef]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef]
- Wang, L.; Xia, S.; Zhang, H.; Li, Y.; Huang, Z.; Qiao, B.; Zhong, L.; Cao, M.; He, X.; Wang, C.; et al. Tank-Mix Adjuvants Improved Spray Performance and Biological Efficacy in Rice Insecticide Application with Unmanned Aerial Vehicle Sprayer. Pest Manag. Sci. 2024, 80, 4371–4385. [Google Scholar] [CrossRef]
- Herbst, A.; Bonds, J.; Wang, Z.; Zeng, A.; He, X.; Goff, P. The Influence of Unmanned Agricultural Aircraft System Design on Spray Drift. J. Für Kult. 2020, 72, 1–11. [Google Scholar]
- Zheng, L.; Cao, C.; Chen, Z.; Cao, L.; Huang, Q.; Song, B. Efficient Pesticide Formulation and Regulation Mechanism for Improving the Deposition of Droplets on the Leaves of Rice (Oryza sativa L.). Pest Manag. Sci. 2021, 77, 3198–3207. [Google Scholar] [CrossRef] [PubMed]
- Shan, C.; Wu, J.; Song, C.; Chen, S.; Wang, J.; Wang, H.; Wang, G.; Lan, Y. Control Efficacy and Deposition Characteristics of an Unmanned Aerial Spray System Low-Volume Application on Corn Fall Armyworm Spodoptera frugiperda. Front. Plant Sci. 2022, 13, 900939. [Google Scholar] [CrossRef] [PubMed]
- Huang, Z.; Wang, C.; Wongsuk, S.; Qi, P.; Liu, L.; Qiao, B.; Zhong, L.; He, X. Field Evaluation of a Six-Rotor Unmanned Agricultural Aerial Sprayer: Effects of Application Parameters on Spray Deposition and Control Efficacy against Rice Planthopper. Pest Manag. Sci. 2023, 79, 4664–4678. [Google Scholar] [CrossRef]
- Zhang, P.; Deng, L.; Lyu, Q.; He, S.L.; Yi, S.L.; De Liu, Y.; Yu, Y.X.; Pan, H.Y. Effects of Citrus Tree-Shape and Spraying Height of Small Unmanned Aerial Vehicle on Droplet Distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar] [CrossRef]
- Yan, X.; Wang, M.; Zhu, Y.; Shi, X.; Liu, X.; Chen, Y.; Xu, J.; Yang, D.; Yuan, H. Effect of Aviation Spray Adjuvant on Improving Control of Fusarium Head Blight and Reducing Mycotoxin Contamination in Wheat. Agriculture 2021, 11, 1284. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y.; Zhang, Z.; Han, L.; Li, Y.; Zhang, H.; Wongsuk, S.; Li, Y.; Wu, X.; He, X. Spray Performance Evaluation of a Six-Rotor Unmanned Aerial Vehicle Sprayer for Pesticide Application Using an Orchard Operation Mode in Apple Orchards. Pest Manag. Sci. 2022, 78, 2449–2466. [Google Scholar] [CrossRef]
- Liu, Y.; Xiao, Q.; Han, X.; Zeeshan, M.; Fang, Z.; Dou, Z. Effect of Aerial Application of Adjuvants on Pepper Defoliant Droplet Deposition and Efficacy of Defoliation Sprayed by Unmanned Aerial Vehicles. Front. Plant Sci. 2022, 13, 917462. [Google Scholar] [CrossRef]
- Zhao, R.; Sun, Z.; Bird, N.; Gu, Y.; Xu, Y.; Zhang, Z.; Wu, X. Effects of Tank-Mix Adjuvants on Physicochemical Properties and Dosage Delivery at Low Dilution Ratios for Unmanned Aerial Vehicle Application in Paddy Fields. Pest Manag. Sci. 2022, 78, 1582–1593. [Google Scholar] [CrossRef]
- Zhao, R.; Yu, M.; Sun, Z.; Li, L.; Shang, H.; Xi, W. Using Tank-Mix Adjuvant Improves the Physicochemical Properties and Dosage Delivery to Reduce the Use of Pesticides in Unmanned Aerial Vehicles for Plant Protection in Wheat. Pest Manag. Sci. 2022, 78, 2512–2522. [Google Scholar] [CrossRef]
- Guo, S.; Li, J.; Yao, W.; Hu, X.; Wei, X.; Long, B. Optimization of the Factors Affecting Droplet Deposition in Rice Fields by Rotary Unmanned Aerial Vehicles (UAVs). Precis. Agric. 2021, 22, 1918–1935. [Google Scholar] [CrossRef]
- Cavalaris, C.; Tagarakis, A.C.; Kateris, D.; Bochtis, D. Cost Analysis of Using UAV Sprayers for Olive Fruit Fly Control. AgriEngineering 2023, 5, 1925–1942. [Google Scholar] [CrossRef]
- Li, Y.; Han, L.; Liu, L.; Huang, Z.; Wang, C.; He, X. Design and Spray Performance Evaluation of an Air–Ground Cooperation Stereoscopic Plant Protection System for Mango Orchards. Agronomy 2023, 13, 2007. [Google Scholar] [CrossRef]
- Zhong, Y.; Jin, Y.; Xu, S.; Liu, X.; Song, J. Efficacy of Two Tank-Mix Adjuvants to Control Mango Thrips Using a UAV Sprayer. Agriculture 2023, 13, 1805. [Google Scholar] [CrossRef]
- Zhang, S.C.; Xue, X.Y.; Sun, Z.; Zhou, L.X.; Jin, Y.K. Downwash Distribution of Single-Rotor Unmanned Agricultural Helicopter on Hovering State. Int. J. Agric. Biol. Eng. 2017, 10, 14–24. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, W.; Fu, H.; Fu, X.; Qi, L. Distribution Regularity of Downwash Airflow under Rotors of Agricultural UAV for Plant Protection. Int. J. Agric. Biol. Eng. 2021, 14, 46–57. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, R.; Chen, L.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Numerical Simulation of the Downwash Flow Field and Droplet Movement from an Unmanned Helicopter for Crop Spraying. Comput. Electron. Agric. 2020, 174, 105468. [Google Scholar] [CrossRef]
- Guo, Q.; Zhu, Y.; Tang, Y.; Hou, C.; He, Y.; Zhuang, J.; Zheng, Y.; Luo, S. CFD Simulation and Experimental Verification of the Spatial and Temporal Distributions of the Downwash Airflow of a Quad-Rotor Agricultural UAV in Hover. Comput. Electron. Agric. 2020, 172, 105343. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Liu, A.; Mao, Y. Effect of Wind Field below Unmanned Helicopter on Droplet Deposition Distribution of Aerial Spraying. Int. J. Agric. Biol. Eng. 2017, 10, 67–77. [Google Scholar]
- Wei, X.; Zhang, Z.; Li, H.; Wu, H.; Lv, J.; Wu, L.; Zhou, M.; Li, J. Influences of Wind Vortex Intensity of Rotor UAV on Rice Morphology and Yield. Precis. Agric. 2023, 24, 1766–1791. [Google Scholar] [CrossRef]
- Zhang, R.; Hewitt, A.J.; Chen, L.; Li, L.; Tang, Q. Challenges and Opportunities of Unmanned Aerial Vehicles as a New Tool for Crop Pest Control. Pest Manag. Sci. 2023, 79, 4123–4131. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Qi, P.; Li, Y.; He, X. Visualization of Aerial Droplet Distribution for Unmanned Aerial Spray Systems Based on Laser Imaging. Drones 2024, 8, 613. [Google Scholar] [CrossRef]
- Chyrva, I.; Jermy, M.; Strand, T.; Richardson, B. Evaluation of the Pattern of Spray Released from a Moving Multicopter. Pest Manag. Sci. 2023, 79, 1483–1499. [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Bonds, J.; Qi, P.; Yang, Y.; Gao, W. Effect of Downwash Airflow Field of 8-Rotor Unmanned Aerial Vehicle on Spray Deposition Distribution Characteristics under Different Flight Parameters. Smart Agric. 2020, 2, 124–136. [Google Scholar] [CrossRef]
- Lan, Y.; Qian, S.; Chen, S.; Zhao, Y.; Deng, X.; Wang, G.; Zang, Y.; Wang, J.; Qiu, X. Influence of the Downwash Wind Field of Plant Protection UAV on Droplet Deposition Distribution Characteristics at Different Flight Heights. Agronomy 2021, 11, 2399. [Google Scholar] [CrossRef]
- Yang, F.; Xue, X.; Cai, C.; Zhou, Q. Effect of Downwash Airflow in Hover on Droplet Motion Law for Multi-Rotor Unmanned Plant Protection Machine. Trans. Chin. Soc. Agric. Eng. 2018, 34, 64–73. [Google Scholar] [CrossRef]
- Wongsuk, S.; Qi, P.; Wang, C.; Zeng, A.; Sun, F.; Yu, F.; Zhao, X.; Xiongkui, H. Spray Performance and Control Efficacy against Pests in Paddy Rice by UAV-Based Pesticide Application: Effects of Atomization, UAV Configuration and Flight Velocity. Pest Manag. Sci. 2024, 80, 2072–2084. [Google Scholar] [CrossRef]
- Wang, X. Tank-Mix Adjuvants: The Essential Tool for The Management of Resistant Small Insects. J. Agrochem. Mark. 2022, 1, 30–32. [Google Scholar]
- Cox, C.; Zeiss, M. Health, Pesticide Adjuvants, and Inert Ingredients: California Case Study Illustrates Need for Data Access. Environ. Health Perspect. 2022, 130, 085001. [Google Scholar] [CrossRef]
- Hewitt, A.J. Adjuvant Use for the Management of Pesticide Drift, Leaching and Runoff. Pest Manag. Sci. 2024, 80, 4819–4827. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, C.; Li, X. Research, Application and Development Trend of Tank-mix Adjuvant in China 2021. Mod. Agrochem. 2021, 1, 19–25. [Google Scholar] [CrossRef]
- Curran, W.S.; Mcglamery, M.D.; Liebl, R.A.A.; Lingenfelter, D.D. Adjuvants for Enhancing Herbicide Performance; Agronomy Facts 37; Penn State College of Agricultural Sciences: University Park, PA, USA, 1999. [Google Scholar]
- Xu, L.; Zhu, H.; Ozkan, H.E.; Bagley, W.E.; Derksen, R.C.; Krause, C.R. Adjuvant Effects on Evaporation Time and Wetted Area of Droplets on Waxy Leaves. Trans. ASABE 2010, 53, 13–20. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, L.; Zheng, F.; Chen, F.; Liang, W. The Effect of Adjuvants on Penetration of Beta-Cypermethrin Through the Epidermis of Cabbage Leaf. Agric. Sci. China 2002, 1, 313–318. [Google Scholar]
- Zhao, P.; Zheng, L.; Li, Y.; Wang, C.; Cao, L.; Cao, C.; Huang, Q. Tank-Mix Adjuvants Regulate the Deposition, Absorption, and Permeation Behavior of Pesticide Solutions on Rice Plant. Agriculture 2022, 12, 1119. [Google Scholar] [CrossRef]
- Meng, Y.; Lan, Y.; Mei, G.; Guo, Y.; Song, J.; Wang, Z. Effect of Aerial Spray Adjuvant Applying on the Efficiency of Small Unmanned Aerial Vehicle on Wheat Aphids Control. Int. J. Agric. Biol. Eng. 2018, 11, 46–53. [Google Scholar] [CrossRef]
- ISO 5682-1:2017; Spraying Equipment-Part 1: Test Methods for Sprayer Nozzles. ISO Copyright Office Equipment for Crop Protection: Paris, France, 2017.
- ANSI/ASAE S572.3; Spray Nozzle Classification by Droplet Spectra. American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2020.
- Zhang, R.; Zhang, Z.; Xu, G.; Chen, P.; Hewitt, A.J. Effect of Spray Adjuvant Types and Concentration on Nozzle Atomization. Trans. Chin. Soc. Agric. Eng. 2018, 34, 36–43. [Google Scholar] [CrossRef]
- Wongsuk, S.; Zhu, Z.; Zheng, A.; Qi, P.; Li, Y.; Huang, Z.; Han, H.; Wang, C.; He, X. Assessing the Potential Spray Drift of a Six-Rotor Unmanned Aerial Vehicle Sprayer Using a Test Bench and Airborne Drift Collectors under Low Wind Velocities: Impact of Atomization Characteristics and Application Parameters. Pest Manag. Sci. 2024, 80, 6053–6067. [Google Scholar] [CrossRef]
- Hu, H.; Ma, Y.; Song, X.; Wang, D.; Ren, X.; Wu, C.; Liu, C.; Ma, X.; Shan, Y.; Meng, Y.; et al. Tank-Mix Adjuvants Enhance Pesticide Efficacy by Improving Physicochemical Properties and Spraying Characteristics for Application to Cotton with Unmanned Aerial Vehicles. ACS Omega 2024, 9, 31011–31025. [Google Scholar] [CrossRef]
- Dou, Z.; Fang, Z.; Han, X.; Zeeshan, M.; Liu, Y.; Lan, Y. Effects of Spray Adjuvants and Operation Modes on Droplet Deposition and Elm Aphid Control Using an Unmanned Aerial Vehicle. Int. J. Agric. Biol. Eng. 2023, 16, 1–9. [Google Scholar] [CrossRef]





| Adjuvant | Ingredients | Contents (%) | Recommended Dosage (%V/V) |
|---|---|---|---|
| AGE852B | Ammonium sulfate | 40 | 2 |
| Methylated seed oil | 50 | ||
| Alkoxylated phosphate ester | 10 | ||
| AGE825 | Natural fatty acid | 71 | 2 |
| Guerbet alcohols, C10, ethoxylated NR | 28.2 | ||
| Calcium dodecylbenzene sulfonate | 0.8 | ||
| AGE809 | Soybean lecithins | 50 | 1 |
| Methylated seed oil | 24 | ||
| Alcohols, C11, ethoxylate (5 EO) | 26 | ||
| CCL846 | Water | 44 | 2 |
| Fatty acid methyl esters | 22 | ||
| Natural fatty acid | 14 | ||
| Alcohols, C16-18, and C18-unsaturated ethoxylated | 9 | ||
| Starch | 6 | ||
| Glycerol | 5 |
| No. | Adjuvant | Rotation Speed (rpm) | |
|---|---|---|---|
| Single-Rotor | Multi-Rotor | ||
| 1 | 2% AGE825 | 0 | 0 |
| 2 | 824 | 2200 | |
| 3 | 962 | 2400 | |
| 4 | 1072 | 2600 | |
| 5 | 2% AGE852B | 0 | 0 |
| 6 | 824 | 2200 | |
| 7 | 962 | 2400 | |
| 8 | 1072 | 2600 | |
| 9 | 1% AGE809 | 0 | 0 |
| 10 | 824 | 2200 | |
| 11 | 962 | 2400 | |
| 12 | 1072 | 2600 | |
| 13 | 2% CCL846 | 0 | 0 |
| 14 | 824 | 2200 | |
| 15 | 962 | 2400 | |
| 16 | 1072 | 2600 | |
| Source of Variance | DV50 | RS | V100 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| p Value | Sig. | Correlation Coefficient | p Value | Sig. | Correlation Coefficient | p Value | Sig. | Correlation Coefficient | |
| Rotor speed (R) | 3.630 × 10−5 | ***, †, ‡ | 0.030 | 0.039 | *, †, ‡ | 0.073 | 7.070 × 10−10 | ***, †, ‡ | −0.133 |
| Distance (D) | 2.830 × 10−37 | *** | 0.334 ** | 1.095 × 10−8 | *** | −0.323 ** | 3.540 × 10−49 | *** | −0.526 ** |
| Adjuvant (A) | 7.574 × 10−68 | *** | 0.660 ** | 0.639 | NS | 0.017 | 1.455 × 10−48 | *** | −0.542 ** |
| R × D | 4.574 × 10−24 | *** | 1.364 × 10−5 | *** | 4.440 × 10−28 | *** | |||
| R × A | 3.352 × 10−16 | *** | 0.008 | ** | 2.856 × 10−10 | *** | |||
| D × A | 7.324 × 10−30 | *** | 1.193 × 10−8 | *** | 1.680 × 10−20 | *** | |||
| R × D × A | 3.719 × 10−13 | *** | 0.002 | *** | 2.165 × 10−7 | *** | |||
| Source of Variance | DV50 | RS | V100 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| p Value | Sig. | Correlation Coefficient | p Value | Sig. | Correlation Coefficient | p Value | Sig. | Correlation Coefficient | |
| Rotor speed (R) | 2.893 × 10−6 | ***, †, ‡ | 0.070 | 6.321 × 10−21 | ***, †, ‡ | −0.130 * | 1.238 × 10−42 | ***, †, ‡ | −0.209 ** |
| Distance (D) | 5.292 × 10−91 | *** | 0.009 | 3.587 × 10−57 | *** | −0.174 ** | 5.443 × 10−105 | *** | 0.056 |
| Adjuvant (A) | 4.024 × 10−104 | *** | 0.517 ** | 1.673 × 10−80 | *** | −0.593 ** | 5.531 × 10−97 | *** | −0.393 ** |
| R × D | 2.489 × 10−63 | *** | 1.380 × 10−23 | *** | 8.232 × 10−56 | *** | |||
| R × A | 4.661 × 10−18 | *** | 1.542 × 10−6 | *** | 5.524 × 10−19 | *** | |||
| D × A | 1.038 × 10−41 | *** | 2.367 × 10−50 | *** | 1.225 × 10−47 | *** | |||
| R × D × A | 5.101 × 10−14 | *** | 2.450 × 10−13 | *** | 9.860 × 10−19 | *** | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wongsuk, S.; Li, Y.; Zhu, Z.; Yang, M.; Zhang, H.; Zhang, L.; Wang, C.; He, X. Effects of Tank-Mix Adjuvants on Spray Performance Under Downwash Airflow Fields Using an Indoor Simulated UASS Spraying Platform. Drones 2025, 9, 6. https://doi.org/10.3390/drones9010006
Wongsuk S, Li Y, Zhu Z, Yang M, Zhang H, Zhang L, Wang C, He X. Effects of Tank-Mix Adjuvants on Spray Performance Under Downwash Airflow Fields Using an Indoor Simulated UASS Spraying Platform. Drones. 2025; 9(1):6. https://doi.org/10.3390/drones9010006
Chicago/Turabian StyleWongsuk, Supakorn, Yangfan Li, Zhaoyan Zhu, Mengran Yang, Hao Zhang, Li Zhang, Changling Wang, and Xiongkui He. 2025. "Effects of Tank-Mix Adjuvants on Spray Performance Under Downwash Airflow Fields Using an Indoor Simulated UASS Spraying Platform" Drones 9, no. 1: 6. https://doi.org/10.3390/drones9010006
APA StyleWongsuk, S., Li, Y., Zhu, Z., Yang, M., Zhang, H., Zhang, L., Wang, C., & He, X. (2025). Effects of Tank-Mix Adjuvants on Spray Performance Under Downwash Airflow Fields Using an Indoor Simulated UASS Spraying Platform. Drones, 9(1), 6. https://doi.org/10.3390/drones9010006