
Optimal Coverage Path Planning for UAV-Assisted Multiple USVs: Map Modeling and Solutions


Abstract
1. Introduction
- (1)
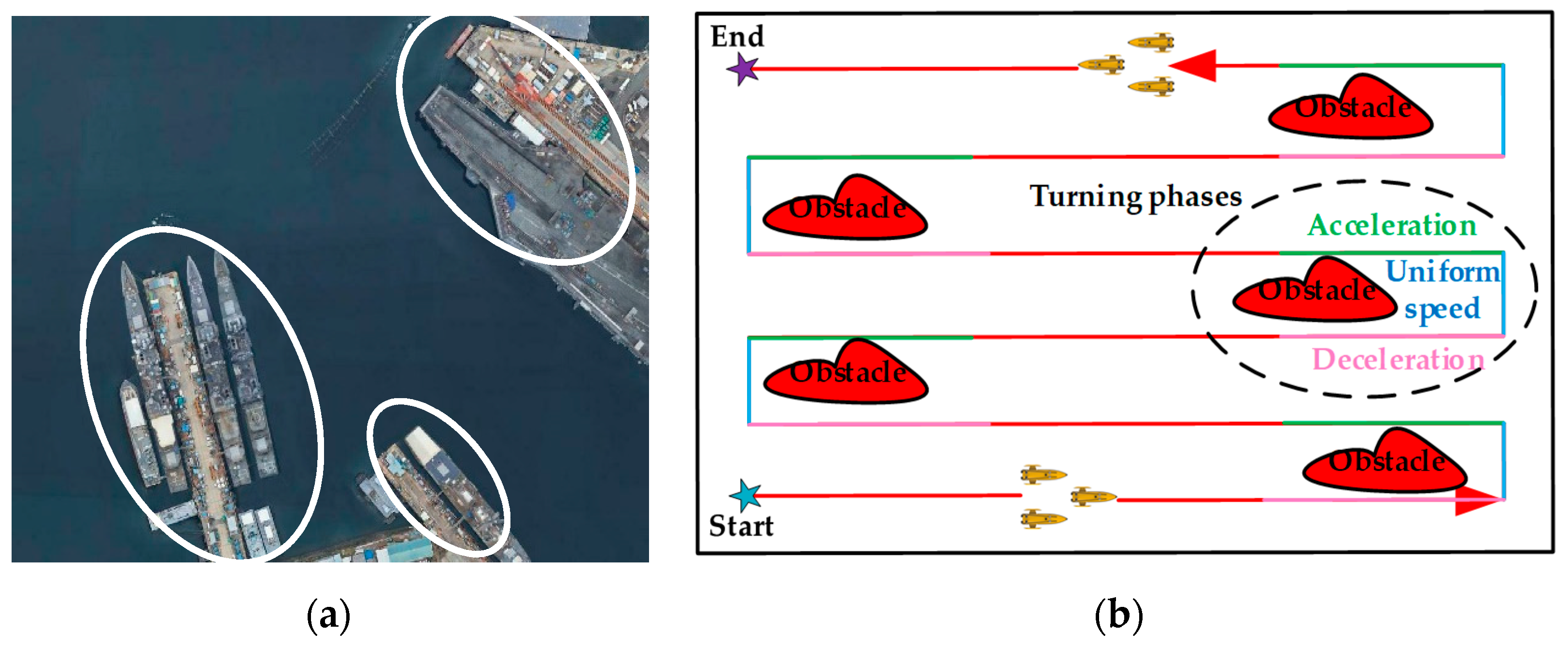
- Obstacle extraction and accurate mapping: UAV aerial images often contain static obstacles, such as coastlines with complex shapes and small-scale cargo ships with similar appearances. Traditional map modeling methods struggle to ensure the accurate extraction of these challenging obstacles.
- (2)
- Impact of turns on coverage efficiency: Obstacles can interrupt the straight paths of multiple USVs, significantly increasing the number of turns required. Each turn forces the USV to undergo a “deceleration–uniform speed–acceleration” motion phase, during which it must overcome inertia and water flow resistance. Consequently, more frequent turns lead to additional power consumption. However, current commonly used CPP algorithms only take path length and time as optimization objectives, and do not consider the influence of turns on the overall coverage efficiency.
- (1)
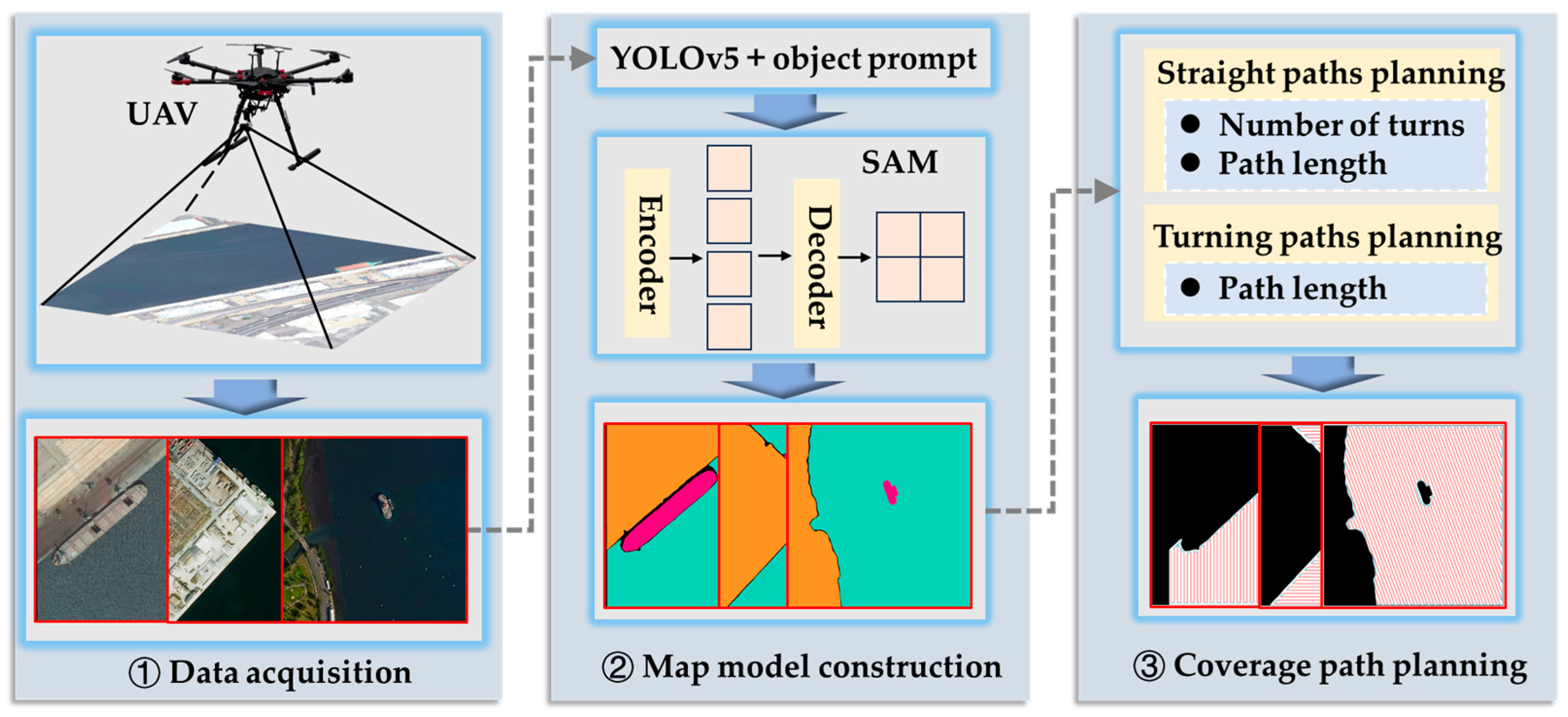
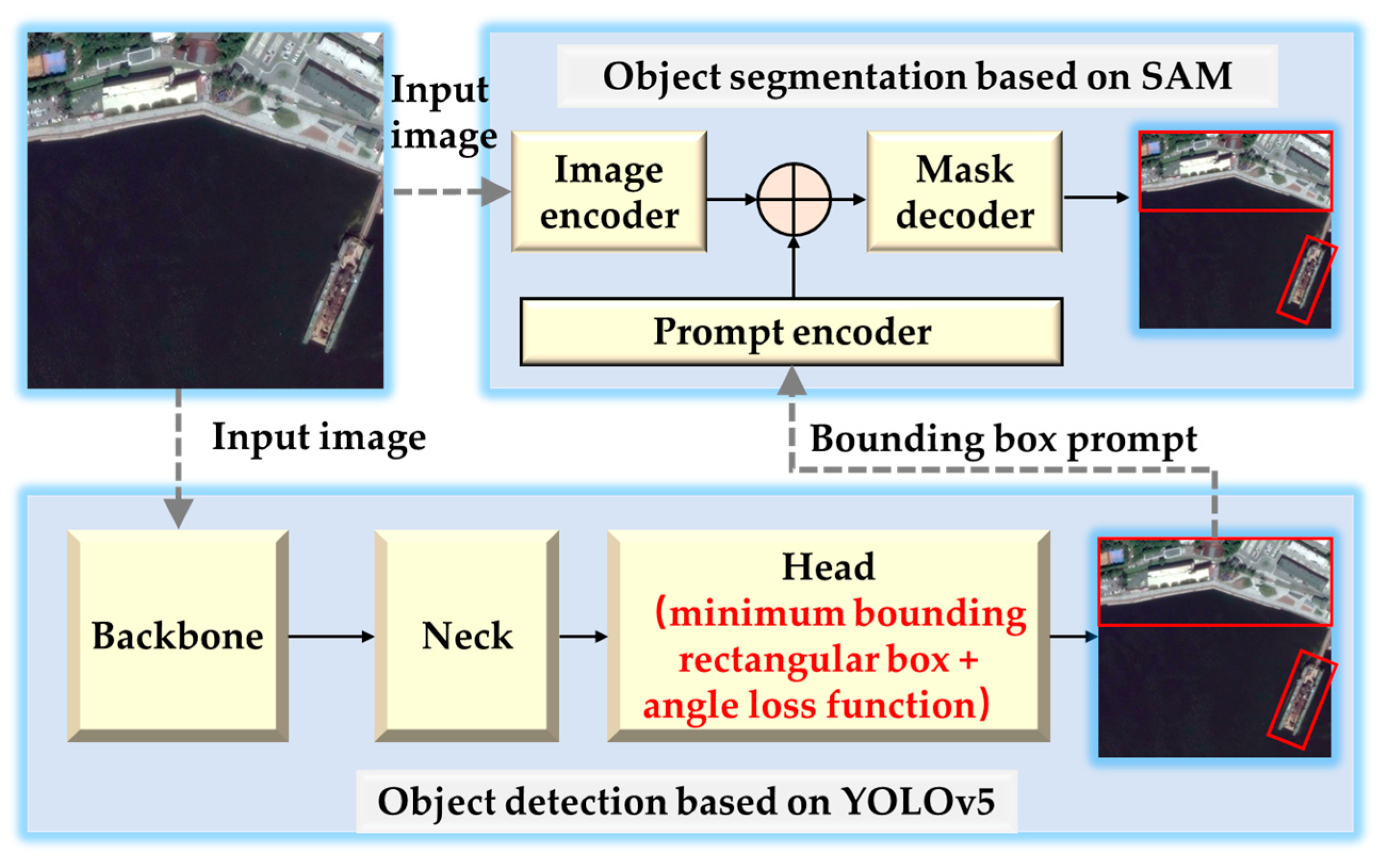
- To establish an accurate map model, a semantic segmentation algorithm based on YOLOv5-assisted SAM is proposed. By redefining the representation of the minimum bounding rectangular box and a new angle loss function, the accurate object bounding box prompt is obtained. It can guide SAM to automatically and precisely segment obstacles in UAV aerial images.
- (2)
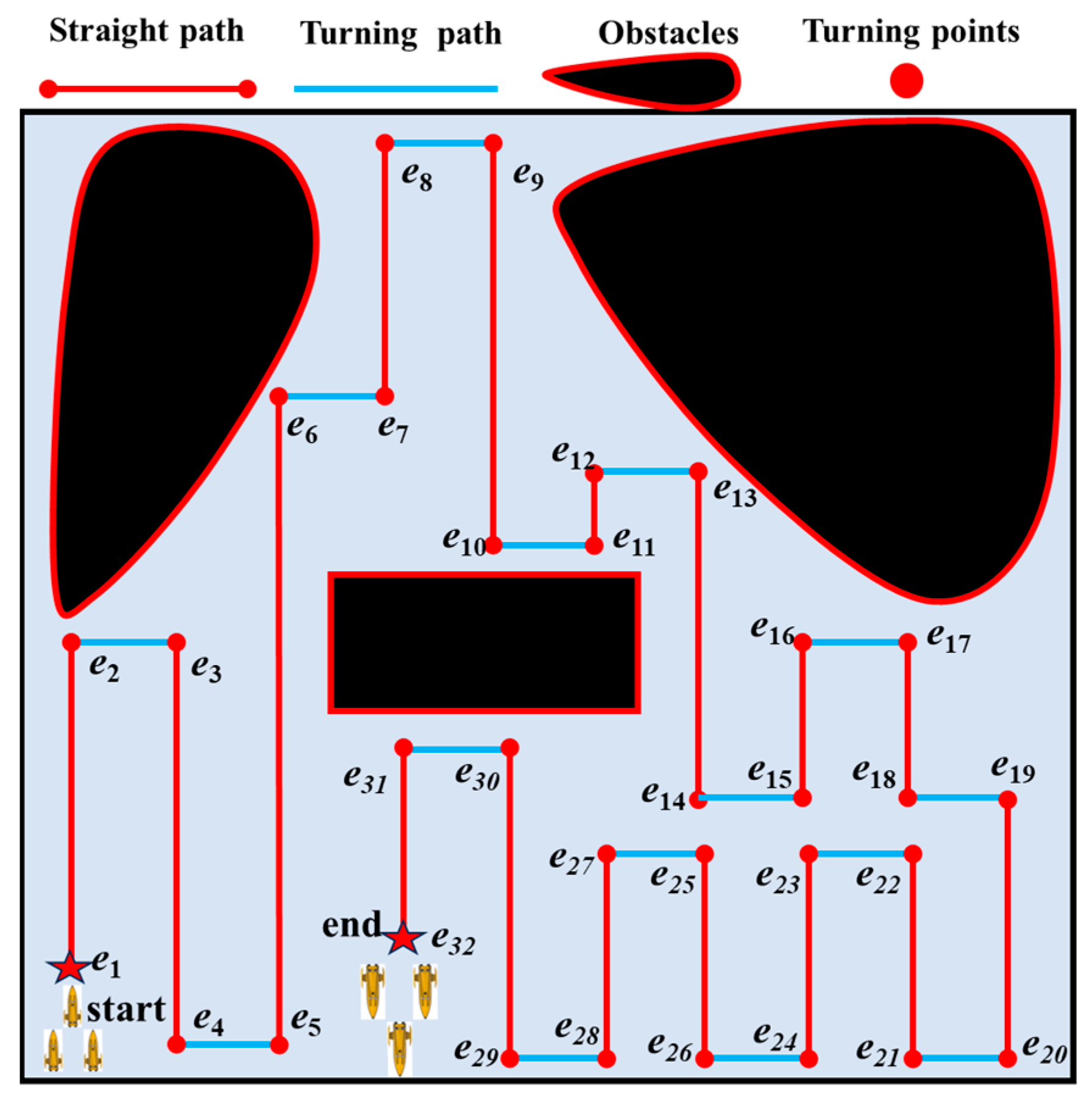
- A coverage path planning algorithm based on multi-objective stepwise optimization is proposed. The algorithm divides the complete coverage path into straight paths and turning paths. In the two path planning steps, the number of turns and the path length are used as constraints to make the generated path optimal.
- (3)
- A novel collaborative operation system of a UAV and multiple USVs is constructed. The USVs are guided to carry out marine coverage operations with the UAV aerial images as input, which provides more comprehensive and effective perception results by segmentation. The use of large language model technology for accurate map modeling is explored in this paper, and the effectiveness of the proposed coverage path planning algorithm is verified on several complex map models.
2. Related Work
2.1. Map Modeling Based on UAV Aerial Images
2.2. Centralized Coverage Path Planning for Multiple USVs
3. Proposed Methodology
3.1. Semantic Segmentation Algorithm Based on YOLOv5-Assisted Prompting SAM
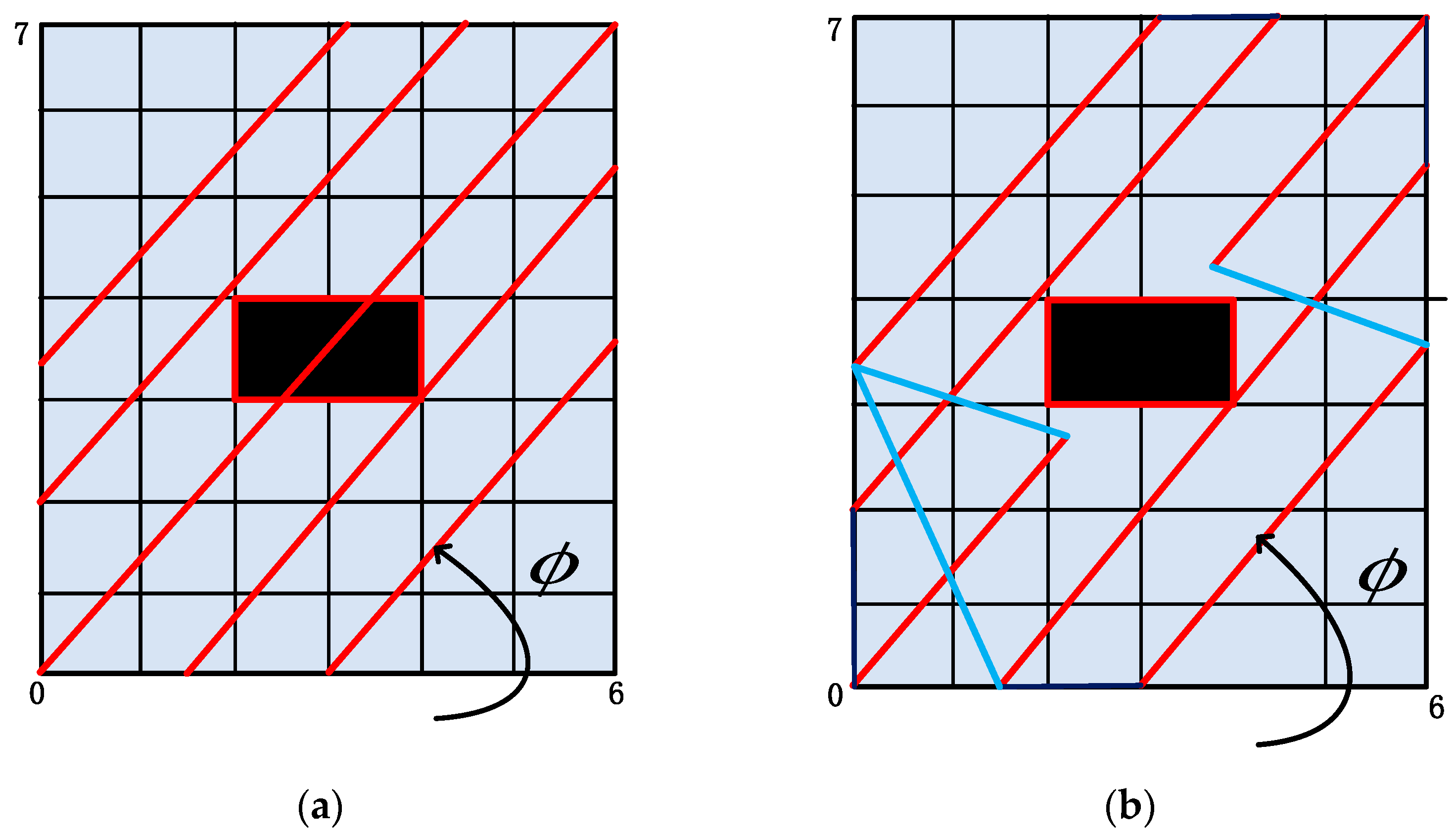
3.2. Coverage Path Planning Algorithm Based on Multi-Objective Stepwise Optimization
| Algorithm 1: Coverage path planning algorithm based on multi-objective stepwise optimization | |
| Input: Map model Map (i, j), Operational width of the USVs w | |
| Output: Optimal coverage path (straight paths and turning paths) | |
| Step1: Straight paths planning | |
| 1: | For in [−90°, 90°] Do |
| 2: | Then |
| 3: | |
| 4: | End if |
| 5: | End For |
| Step2: Turning paths planning | |
| 1: | in Do |
| 2: | Then |
| 3: | ) |
| 4: | End if |
| 5: | End For |
4. Simulation Experiments
4.1. Effect Verification of Semantic Segmentation Algorithm
4.1.1. Parameter Setting
4.1.2. Ablation Experiments
4.1.3. Comparative Experiments
4.2. Effect Verification of Coverage Path Planning Algorithm
4.2.1. Parameter Setting
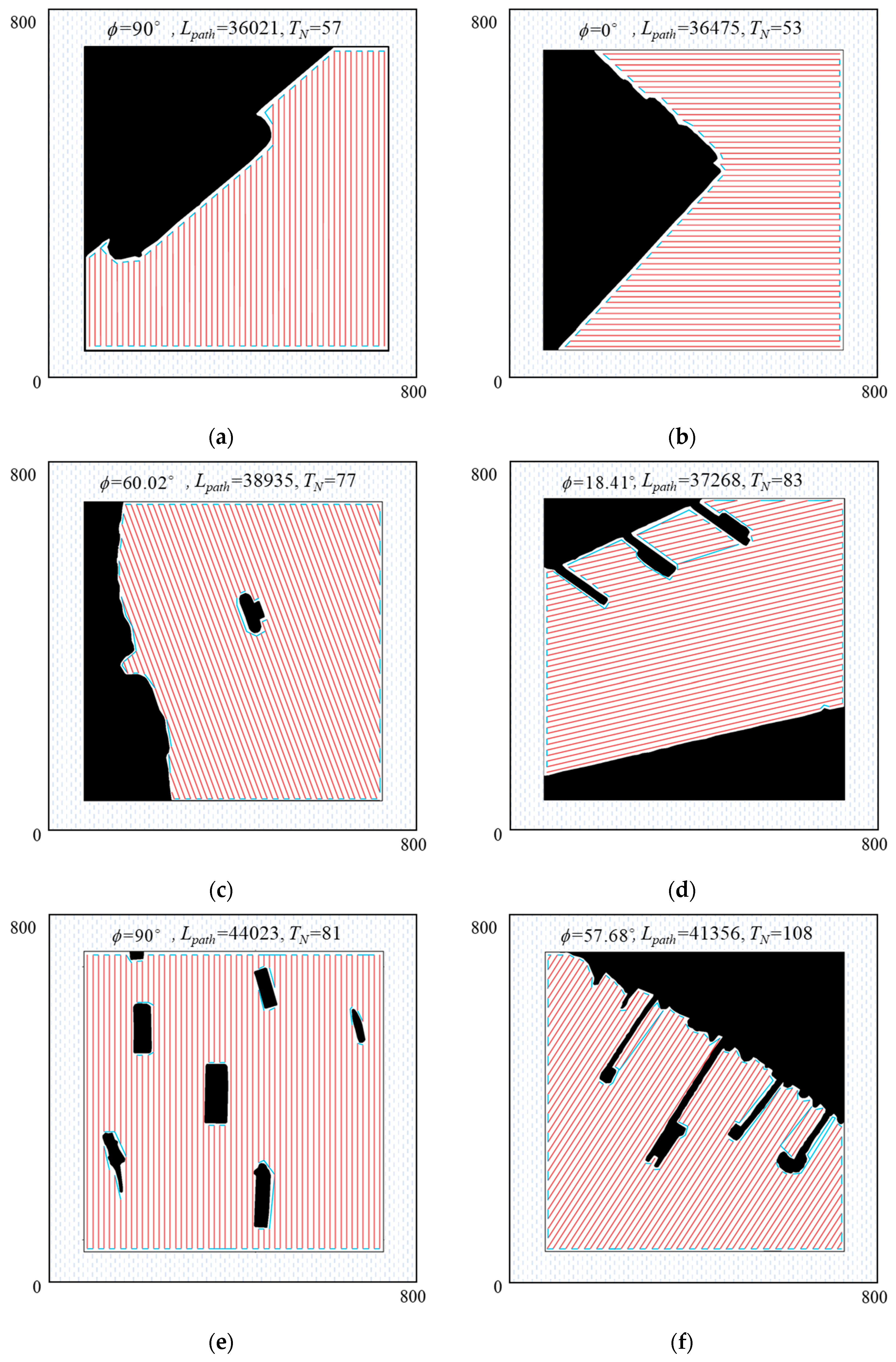
4.2.2. Coverage Path Planning Visual Result Analysis
4.2.3. Comparative Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, Z.; Li, L.; Xu, H.; Zong, L.; Dai, Y. Collaborative Obstacle Detection for Dual USVs Using MGNN-DANet with Movable Virtual Nodes and Double Attention. Drones 2024, 8, 418. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A novel cooperative design for USV–UAV systems: 3-D mapping guidance and adaptive fuzzy control. IEEE Trans. Control Netw. Syst. 2022, 10, 564–574. [Google Scholar] [CrossRef]
- Du, B.; Xie, W.; Zhang, W.; Chen, H. A target tracking guidance for unmanned surface vehicles in the presence of obstacles. IEEE Trans. Intell. Transp. Syst. 2023, 25, 4102–4115. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Jiang, C.; Zhang, W. A survey of maritime unmanned search system: Theory, applications and future directions. Ocean Eng. 2023, 285, 115359. [Google Scholar] [CrossRef]
- Jin, X.; Er, M.J. Cooperative path planning with priority target assignment and collision avoidance guidance for rescue unmanned surface vehicles in a complex ocean environment. Adv. Eng. Inform. 2022, 52, 101517. [Google Scholar] [CrossRef]
- Qian, L.P.; Zhang, H.; Wang, Q.; Wu, Y.; Lin, B. Joint multi-domain resource allocation and trajectory optimization in UAV-assisted maritime IoT networks. IEEE Internet Things J. 2022, 10, 539–552. [Google Scholar] [CrossRef]
- Bae, I.; Hong, J. Survey on the developments of unmanned marine vehicles: Intelligence and cooperation. Sensors 2023, 23, 4643. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Zhu, B.; Zhou, Y.; Yao, P.; Yu, J. Cooperative path planning of multiple unmanned surf ace vehicles for search and coverage task. Drones 2022, 7, 21. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Optimal coverage path planning for USV-assisted coastal bathymetric survey: Models, solutions, and lake trials. Ocean Eng. 2024, 296, 116921. [Google Scholar] [CrossRef]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. A review of path-planning approaches for multiple mobile robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Luo, J.; Su, Y. Path planning for Multi-USV target coverage in complex environments. Ocean Eng. 2024, 312, 119090. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, J.; Ma, Y.; Zhang, C.-Y. Derivation of bathymetry from high-resolution optical satellite imagery and USV sounding data. Mar. Geod. 2017, 40, 466–479. [Google Scholar] [CrossRef]
- Kulbacki, A.; Lubczonek, J.; Zaniewicz, G. Acquisition of Bathymetry for Inland Shallow and Ultra-Shallow Water Bodies Using PlanetScope Satellite Imagery. Remote Sens. 2024, 16, 3165. [Google Scholar] [CrossRef]
- Yang, X.; Shi, Y.; Liu, W.; Ye, H.; Zhong, W.; Xiang, Z. Global path planning algorithm based on double DQN for multi-tasks amphibious unmanned surface vehicle. Ocean Eng. 2022, 266, 112809. [Google Scholar]
- Luo, J.; Zhuang, J.; Jin, M.; Xu, F.; Su, Y. An energy-efficient path planning method for unmanned surface vehicle in a time-variant maritime environment. Ocean Eng. 2024, 301, 117544. [Google Scholar] [CrossRef]
- Li, W.; Ge, Y.; Guan, Z.; Ye, G. Synchronized motion-Based UAV–USV cooperative autonomous landing. J. Mar. Sci. Eng. 2022, 10, 1214. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, W.; Liu, J.; Sun, C. Cooperative USV–UAV marine search and rescue with visual navigation and reinforcement learning-based control. ISA Trans. 2023, 137, 222–235. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Cheng, X.; Mu, J. Concentrated coverage path planning algorithm of UAV formation for aerial photography. IEEE Sens. J. 2022, 22, 11098–11111. [Google Scholar] [CrossRef]
- Soltero, D.E.; Schwager, M.; Rus, D. Decentralized path planning for coverage tasks using gradient descent adaptive control. Int. J. Robot. Res. 2014, 33, 401–425. [Google Scholar] [CrossRef]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Zweiri, Y. Multi-robot hybrid coverage path planning for 3D reconstruction of large structures. IEEE Access 2021, 10, 2037–2050. [Google Scholar] [CrossRef]
- Hui, Y.; Zhang, X.; Shen, H.; Lu, H.; Tian, B. Dppm: Decentralized exploration planning for multi-uav systems using lightweight information structure. IEEE Trans. Intell. Veh. 2023, 9, 613–625. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, K.; Wang, Y.; Yan, L.; Wang, F.-Y. A loss-balanced multi-task model for simultaneous detection and segmentation. Neurocomputing 2021, 428, 65–78. [Google Scholar] [CrossRef]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. Unet++: Redesigning skip connections to exploit multiscale features in image segmentation. IEEE Trans. Med. Imaging 2019, 39, 1856–1867. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Chen, G.; Hao, K.; Wang, B.; Li, Z.; Zhao, X. A power line segmentation model in aerial images based on an efficient multibranch concatenation network. Expert Syst. Appl. 2023, 228, 120359. [Google Scholar] [CrossRef]
- Lin, N.; Quan, H.; He, J.; Li, S.; Xiao, M.; Wang, B.; Pan, J.; Li, N. Urban vegetation extraction from high-resolution remote sensing imagery on SD-UNet and vegetation spectral features. Remote Sens. 2023, 15, 4488. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, G.; Guo, Y.; Huang, Y.; Shibasaki, R. Learn to extract building outline from misaligned annotation through nearest feature selector. Remote Sens. 2020, 12, 2722. [Google Scholar] [CrossRef]
- Zuo, L.; Gao, S.; Li, Y.; Li, L.; Li, M.; Lu, X. A fast and robust algorithm with reinforcement learning for large UAV cluster mission planning. Remote Sens. 2022, 14, 1304. [Google Scholar] [CrossRef]
- Guo, B.; Kuang, Z.; Guan, J.; Hu, M.; Rao, L.; Sun, X. An improved a-star algorithm for complete coverage path planning of unmanned ships. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2259009. [Google Scholar] [CrossRef]
- Tan, X.; Han, L.; Gong, H.; Wu, Q. Biologically inspired complete coverage path planning algorithm based on Q-learning. Sensors 2023, 23, 4647. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Chen, Y.; Chen, Z.; Wu, H. Multi-UAV cooperative 3D coverage path planning based on asynchronous ant colony optimization. In Proceedings of the IEEE 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 4255–4260. [Google Scholar]
- Wu, G.; Wang, M.; Guo, L. Complete Coverage Path Planning Based on Improved Genetic Algorithm for Unmanned Surface Vehicle. J. Mar. Sci. Eng. 2024, 12, 1025. [Google Scholar] [CrossRef]
- Liu, C.; Mao, Q.; Chu, X.; Xie, S. An improved A-star algorithm considering water current, traffic separation and berthing for vessel path planning. Appl. Sci. 2019, 9, 1057. [Google Scholar] [CrossRef]
- Xing, B.; Yu, M.; Liu, Z.; Tan, Y.; Sun, Y.; Li, B. A review of path planning for unmanned surface vehicles. J. Mar. Sci. Eng. 2023, 11, 1556. [Google Scholar] [CrossRef]
- Xia, G.S.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A large-scale dataset for object detection in aerial images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 3974–3983. [Google Scholar]
- Cheng, B.; Misra, I.; Schwing, A.G.; Kirillov, A.; Girdhar, R. Masked-attention mask transformer for universal image segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1290–1299. [Google Scholar]
- Pan, H.; Hong, Y.; Sun, W.; Jia, Y. Deep dual-resolution networks for real-time and accurate semantic segmentation of traffic scenes. IEEE Trans. Intell. Transp. Syst. 2022, 24, 3448–3460. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bounding Box Prompts | mIoU | mIoU_s |
|---|---|---|
| YOLOv5 (Traditional bounding box) | 87.6% | 82.3% |
| Improved YOLOv5 (Minimum bounding box) | 96.4% | 93.1% |
| Type | Method | mIoU | mIoU_s |
|---|---|---|---|
| Classic semantic segmentation algorithms | U-Net [24] | 90.6% | 84.3% |
| DeeplabV3+ [23] | 91.4% | 86.1% | |
| FCN [25] | 86.2% | 78.6% | |
| Semantic segmentation algorithms in the past three years | Mask2Former [37] | 92.3% | 90.2% |
| DDRNet [38] | 91.9% | 87.6% | |
| Proposed algorithm | 96.4% | 93.1% |
| Parameter | Flight Height | Flight Speed | Vertical Field of View | Horizontal Field of View | Pitch Angle | Camera Installation Angle |
|---|---|---|---|---|---|---|
| Value | 0.1 km | 36 km/h | 70° | 94° | −90°~+30° | 0° |
| Algorithm | Evaluation Indicators | M1 | M2 | M3 | M4 | M5 | M6 |
|---|---|---|---|---|---|---|---|
| Greedy algorithm [34] | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 1.1% | 0.8% | 5.6% | 9.3% | 2.3% | 19.8% | |
| Lpath (pixel) | 36,064 | 36,541 | 39,408 | 38,389 | 45,142 | 43,325 | |
| TN | 66 | 76 | 108 | 141 | 92 | 131 | |
| Proposed CPP algorithm | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 0.1% | 0% | 1.1% | 2.0% | 0.3% | 4.1% | |
| Lpath (pixel) | 36,021 | 36,475 | 38,935 | 37,268 | 44,023 | 41,356 | |
| TN | 57 | 53 | 77 | 83 | 81 | 108 |
| Algorithm | Evaluation Indicators | M1 | M2 | M3 | M4 | M5 | M6 |
|---|---|---|---|---|---|---|---|
| A* algorithm [30] | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 0.7% | 0.5% | 6.5% | 10.4% | 1.2% | 20.5% | |
| Lpath (pixel) | 36,044 | 36,489 | 39,448 | 38,389 | 44,576 | 43,885 | |
| TN | 63 | 66 | 111 | 135 | 87 | 138 | |
| BINN [31] | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 1.2% | 1.0% | 6.0% | 8.6% | 2.1% | 16.9% | |
| Lpath (pixel) | 36,053 | 36,570 | 39,322 | 37,816 | 45,143 | 42,586 | |
| TN | 68 | 73 | 107 | 129 | 91 | 126 | |
| ACO [32] | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 1.1% | 0.7% | 5.8% | 9.0% | 1.8% | 18.9% | |
| Lpath (pixel) | 36,052 | 36,543 | 39,234 | 38,034 | 44,784 | 43,003 | |
| TN | 65 | 70 | 103 | 125 | 90 | 131 | |
| GA [33] | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 1.1% | 0.8% | 5.5% | 8.5% | 2.0% | 17.8% | |
| Lpath (pixel) | 36,054 | 36,556 | 39,198 | 37,768 | 44,987 | 42,756 | |
| TN | 67 | 71 | 98 | 117 | 93 | 129 | |
| Proposed CPP algorithm | Cr (%) | 100% | 100% | 100% | 100% | 100% | 100% |
| Rr (%) | 0.1% | 0% | 1.1% | 2.0% | 0.3% | 4.1% | |
| Lpath (pixel) | 36,021 | 36,475 | 38,935 | 37,268 | 44,023 | 41,356 | |
| TN | 57 | 53 | 77 | 83 | 81 | 108 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, S.; Xu, X.; Cao, Y.; Zhang, L. Optimal Coverage Path Planning for UAV-Assisted Multiple USVs: Map Modeling and Solutions. Drones 2025, 9, 30. https://doi.org/10.3390/drones9010030
Pan S, Xu X, Cao Y, Zhang L. Optimal Coverage Path Planning for UAV-Assisted Multiple USVs: Map Modeling and Solutions. Drones. 2025; 9(1):30. https://doi.org/10.3390/drones9010030
Chicago/Turabian StylePan, Shaohua, Xiaosu Xu, Yi Cao, and Liang Zhang. 2025. "Optimal Coverage Path Planning for UAV-Assisted Multiple USVs: Map Modeling and Solutions" Drones 9, no. 1: 30. https://doi.org/10.3390/drones9010030
APA StylePan, S., Xu, X., Cao, Y., & Zhang, L. (2025). Optimal Coverage Path Planning for UAV-Assisted Multiple USVs: Map Modeling and Solutions. Drones, 9(1), 30. https://doi.org/10.3390/drones9010030