
Safety Risk Modelling and Assessment of Civil Unmanned Aircraft System Operations: A Comprehensive Review




Abstract
1. Introduction
1.1. Background
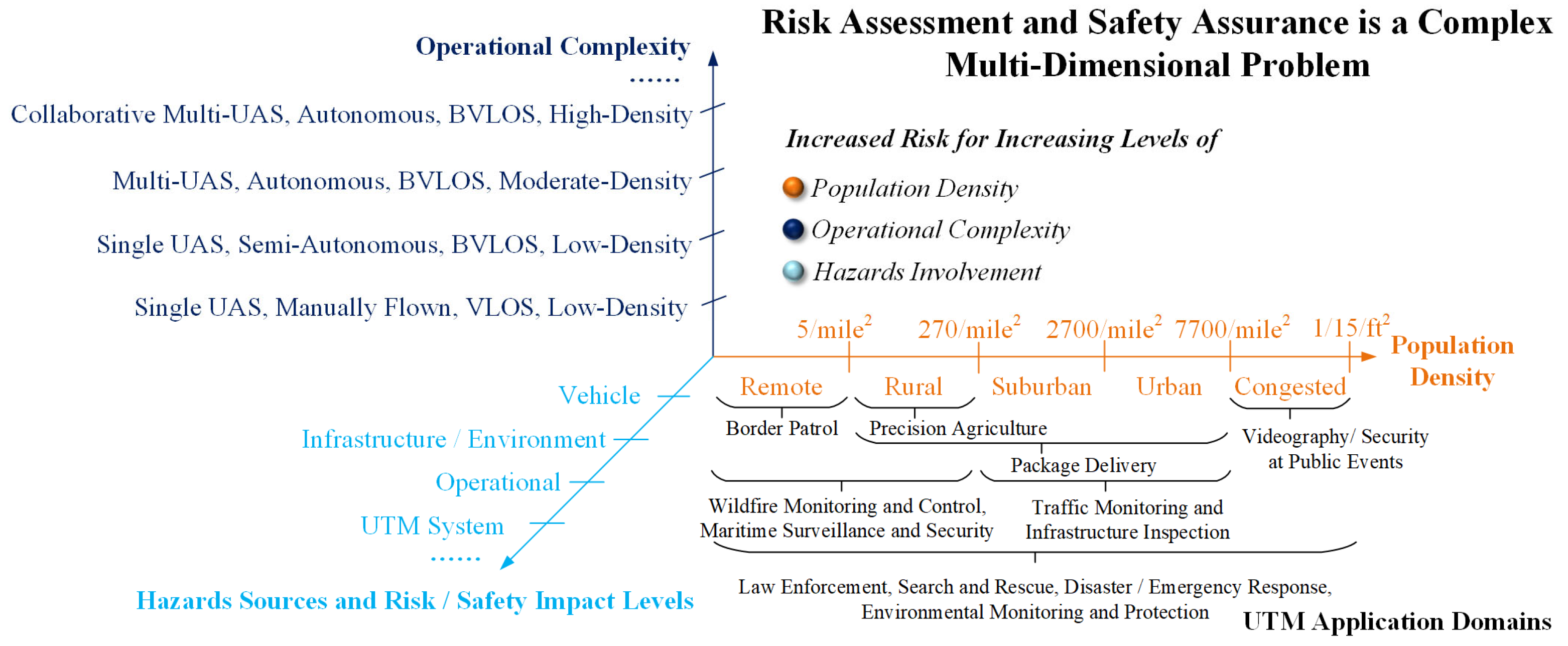
- Multi-dimensional. The escalating complexity imposes heightened requirements on technological capacity. Aiming at the evaluation from See and Avoid in uncontrolled airspace to support BVLOS operations in mature UTM, there are elevated demands on the capabilities of Detect and Avoid (DAA) for UASs that are stipulated by specified requirements [18,19]. In terms of operational risk sources, UAVs, while characterized by operational convenience and high degrees of freedom, are susceptible to influences, like weather, navigation, and managerial proficiency [20]. Additionally, the low-altitude airspace exhibits intricacy of geographical conditions which poses challenges for collision avoidance, along with impediments to data transmission [21].
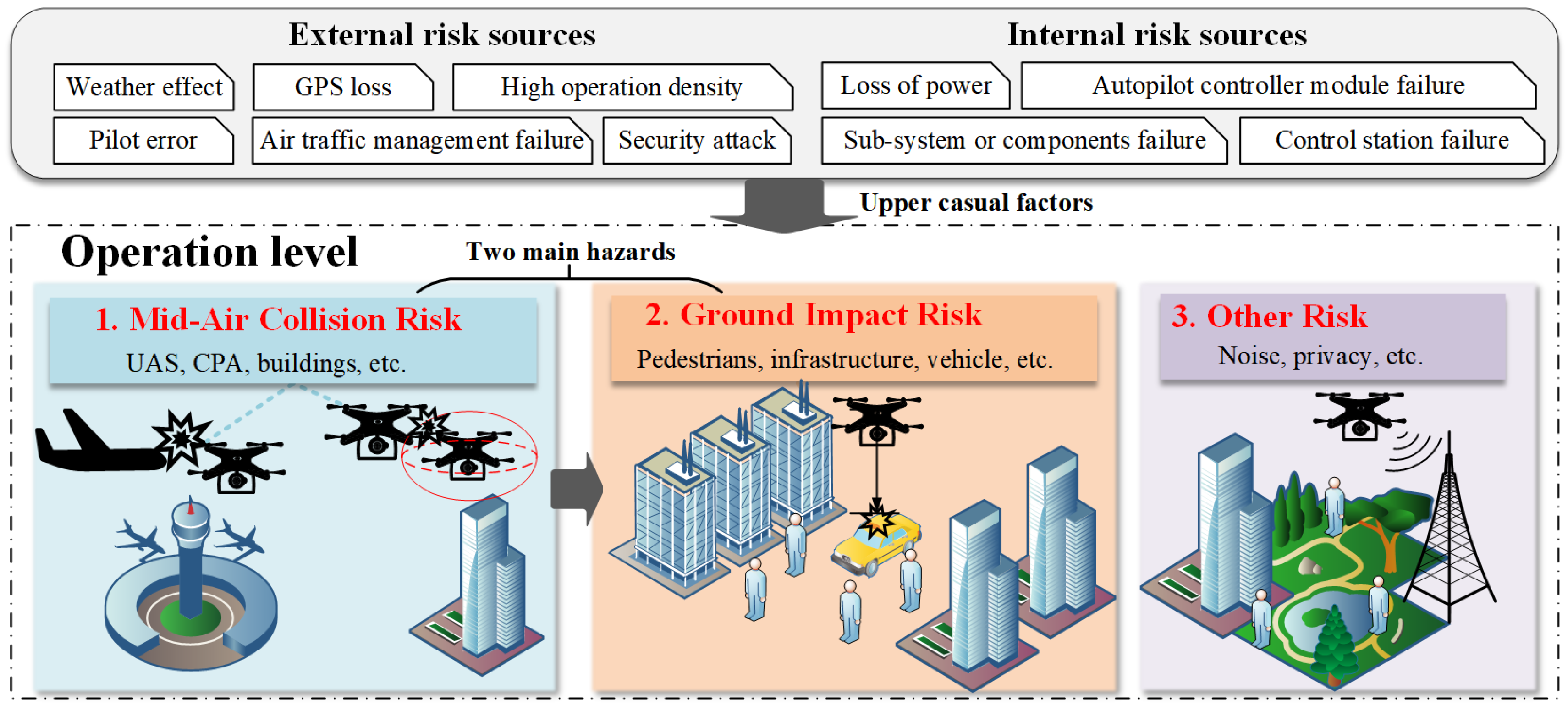
- Interdisciplinary. The technologies involved primarily encompass the safety risk management process (SRMP), reliability engineering, air transport research, etc. The different fields have distinct research objectives and scopes, resulting in diverse definitions, methodologies, and outcomes. From the perspective of the SRMP, research efforts concentrate on the identification of risk sources and hazards, as well as the formulation of mitigation measures [22]. System safety and reliability analysis focuses more on the safety assessment of operational systems and subsystems [23]. Lastly, studies center on Mid-Air Collisions (MACs) and Third-Party Risk (TPR) in air transport [24]. The consistency among the diversities of models brings new barriers in addressing inherent safety risks and associated approval for operations by regulatory bodies.
1.2. Motivation and Contributions
- From the macroscopic perspective, we categorize the research by modelling approaches and mechanisms, i.e., the SRMP, causal model, collision risk model, and ground risk model. The current research framework with explicit categories is presented, and the theoretical distinctions are illustrated with explicit definitions of risk, objectives, and stages focused on.
- From the microscopic perspective, we summarize the detailed applications of the risk outcomes in each category and explore the corresponding support to the stakeholders involved. The main pursuits of the latest advancements and technological challenges are also distilled from the decomposition of model features.
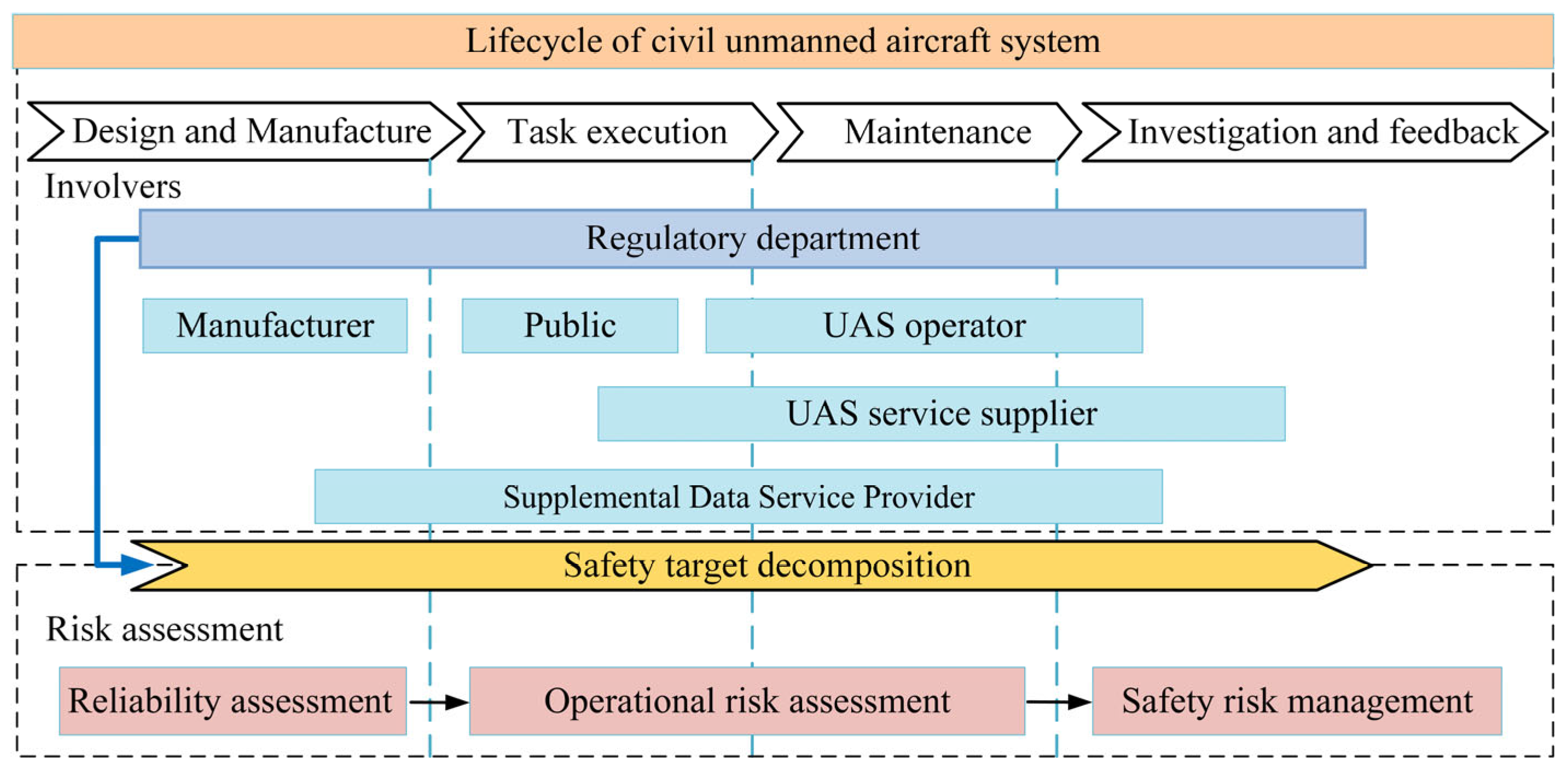
- The future directions of studies are proposed based on the common restrictions among the models. Furthermore, aiming at a tailored methodology for UAS risk assessment, an envisioned workflow through the lifecycle of a UAS is proposed, along with high-level suggestions on the development of relevant regulations for the risk assessment of UAS operations.
2. Overview of Risk Assessment of Civil UAS Operations
2.1. Definitions
2.2. Regulation Framework of UAS Safety Management
2.3. Summative Research Framework
3. Safety Risk Management Process
3.1. Review of the Workflow
3.2. Key Findings of Research
4. Causal Models
- Definitions and metrics of risk, e.g., rate of casualties.
- Focus and application scope, e.g., UAS platforms and Detect and Avoid (DAA) function.
- Assumptions and data substantiation.
4.1. Review of the Models
4.2. Key Findings of Research
- Reliability assessment of the system and sub-components, e.g., the SSPR.
- Identification of critical factors within the interplay of operational settings.
- Quantitative delineation of failure objectives at both operational and equipment levels.
5. Collision Risk Models
- Trajectory estimation and state propagation, e.g., random motion without intention or kinematical models.
- Position error or uncertainty formulation, e.g., Gaussian distribution.
- Determination of collision or conflict, e.g., Near Mid-Air Collision (NMAC).
5.1. Review of the Models
5.2. Key Findings of Research
- Separation requirement for flight schedules and air geofences.
- Design and evaluation process of DAA functions and algorithms of conflict detection and resolution.
- Requirements of standards for infrastructures such as Communication, Navigation, and Surveillance (CNS).
6. Ground Risk Models
- Impact model: what is the location and the size of the area impacted by a given failure?
- Exposure model: how many people or property could be affected in the area?
- Harm model: what is the fatality probability of the people affected with the various stress conditions ()?
6.1. Review of the Models
6.2. Key Findings of Research
- Modelling the ground risk map and assessing the risk for a given UAS trajectory;
- Risk-minimal trajectory planning by transforming into a resolution-based airspace structure;
- Design and evaluation of UAS component materials and external devices like parachutes.
7. Discussion and Future Directions
8. Conclusions
- The summative research framework is an effective method to distinguish the diversities in the developed models, not only revealing the specific risk that the model focused on but also reflecting the inherent relationship of the different categories in Figure 6. The concept of consistent assessment is suggested to establish the general guiding framework for following research.
- The emerging operation concepts and UAS types impose a higher requirement on the accuracy of the existing models. Whilst safety management should achieve the balance between safety and costs (described by conditions of an acceptable level), rigorous risk modelling and assessment could be achieved by the trend of intelligent methodologies and the highly cooperative architecture.
- Risk assessment models are increasingly developing toward the regulation formulation. To help support the decision-making process, the conservative assumptions in model uncertainties should be modified by more transparent, quantitative control variables. As well as the methodologies, more safety cases of UAS risk assessment are necessary to establish a traceable connection between explicit risk and managing points.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

| Acronym | Definition | Acronym | Definition |
|---|---|---|---|
| AAM | Advanced Air Mobility | MAC | Mid-Air Collision |
| AIC | Abbreviated Injury Scale | MC | Monte Carlo |
| ALARP | As Low as Reasonably Practicable | NAS | National Airspace System |
| BBN | Bayesian Brief Network | NASA | National Aeronautics and Space Administration |
| BBTM | Barrier Bow-Tie Model | NMAC | Near Mid-Air Collision |
| BC | Blunt Criterion | PBN | Performance-Based Navigation |
| CPA | Conventional Piloted Aircraft | RCC | Range Commanders Council |
| DAA | Detect And Avoid | SMS | Safety Management System |
| EASA | European Union Aviation Safety Agency | SORA | Specific operations risk assessment |
| ELoS | Equivalent Level of Safety | SRMP | Safety risk management process |
| ETA | Event Tree Analysis | SSPR | System Safety Performance Requirement |
| FAA | Federal Aviation Administration | STPA | System-Theoretic Process Analysis |
| FMECA | Failure Mode Effect and Criticality Analysis | TCAS | Traffic Alert and Collision Avoidance System |
| FTA | Fault Tree Analysis | TPR | Third-Party Risk |
| GRM | Ground risk model | UAM | Urban Air Mobility |
| HIC | Head Injury Criterion | UAS | Unmanned Aircraft System |
| ICAO | International Civil Aviation Organization | UAV | Unmanned Air Vehicle |
| JARUS | Joint Authorities for Rulemaking of Unmanned Systems | UTM | UAS Traffic Management |
Appendix B



Appendix C
| Reference | Risk Definition | UAV Type | Focus | Notes and Supplement Data | Main Conclusion |
|---|---|---|---|---|---|
| Kuchar et al. [61] | Collision probability | Fixed-wing (Global Hawk) | Collision avoidance system | MC simulation | Performance of TCAS is essential, and data generation with human-in-loop simulation is required. |
| Abdallah et al. [33] | Failure probability | Unspecified | Communication of UAV fleet | NPRD database | Air crashes are the major cause of communication failure. |
| Wang et al. [23] | Failure probability | Rotary UAV | UAV platform | MC simulation | Identification of critical units in UAV platform. |
| Ferreira et al. [122] | Collision and ground impact rate | Unspecified | Incidents and accidents | MC simulation | Special treatments are required to support the integration into NAS. |
| Xiao et al. [32] | Incident probability | Unspecified | Incidents and accidents | Records of accidents and incidents in China | Supervision issues are important including responsibility, laws and regulations, etc. |
| Reference | Risk Definition | UAV Type | Focus | Notes and Supplement Data | Main Conclusion |
|---|---|---|---|---|---|
| Weibel et al. [123] | Full definition in SRMP | Fixed-wing | Risk mitigation approach | Non-specific data | A systematic examination of effectiveness of mitigation measures. |
| Clothier et al. [79] | Casualty rate | Fixed-wing (Global Hawk) | Ground impact risk over inhabited areas | Constant failure rate and census data | A framework for identification of the hotspots in the given scenario. |
| Ozuncer et al. [63] | Rate of hazard occurrence | UAVs in category CS-25 | Ground impact risk by hazards | Failure by human error is set to 1 | Safety requirements are derived with root causes and mitigation directions. |
| Melnyk et al. [62] | Casualty rate | UAVs with weight of 4.4 pounds | Ground impact risk over different areas | Failure rate from [124] and census data | Failure rate standards for UAS certification based on size and operations. |
| Melnyk et al. [19] | Casualty rate | Fixed-wing | Performance standards for SAA | MC simulation | Safety requirements are required to be determined by weight and wingspan. |
| Zhang et al. [125] | Casualty rate | Six typical UAVs | Ground impact risk of different tasks | Constant failure rate and uniform distribution of population | The requirements of graded management of UAV operations. |
| Dai et al. [21] | Collision probability | Multi-rotor | Collision risk caused by tracking system failure | MC simulation | The air risk management could achieve benefits from traffic management and route design. |
| Reference | Risk Definition | UAV Type | Focus | Notes and Supplement Data | Main Conclusion |
|---|---|---|---|---|---|
| Luxhøj et al. [126] | Failure probability | UAVs for agriculture | Collision risk with CPA | Failure rate from general aviation. | Air geofencing is effective in mitigating collision risk between UASs and CPA. |
| Tyagi et al. [127] | Collision probability | Fixed-wing | Causal factors | MC simulation | A safety tool is proposed by combining collision risk model and BBN. |
| Barr et al. [25] | Rate of mishap occurrence | UAVs weighing 55 lb or below | Four typical mishaps caused by UAVs | MC simulation | UAS platform could not possess the same level of reliability as their manned counterparts. |
| Ancel et al. [66] | Probability of mishap occurrence | Multi-rotor | Ground impact risk | GIS information on population distribution | A real-time assessment framework is proposed by mishap probability, impact area prediction, and casualty estimation. |
| Allouch et al. [27] | Risk metrics | Unspecified | External and internal causality | Review of the previous research and databases | Real-time safety monitoring is required. |
| Han et al. [67] | Casualty rate | Multi-rotor (Antwork TR7S) | Ground impact risk in urban area | Statistics of the operation data and previous research [15] | Power shortage, partial rotor failure, and battery failure are the main causes. |
| Reference | Risk Definition | UAV Type | Focus | Notes and Supplement Data | Main Conclusion |
|---|---|---|---|---|---|
| Freeman et al. [69] | Risk rating of component failure | Ibis with an Ultrastick 120 airframe | Elevator surface and servo actuator | Expert opinions and NASA categories of severity | Operational envelope is provided for the elevator failures. |
| Osmic et al. [70] | Multi-rotor UAVs with moving mass system | Design of heavy payload UAV | Expert opinions and historical data | The critical failure modes are identified from the RPN, Risk Priority Number. | |
| Zhang et al. [68] | Unspecified | Power system | Fuzzy assessment method | Fuzzy assessment could overcome the irrationality and uncertainty of FMEA |
| Reference | Risk Definition | UAV Type | Focus | Notes and Supplement Data | Main Conclusion |
|---|---|---|---|---|---|
| Chen et al. [72] | Accidents in take-off stage | Subscale flying-wing | Operators and automation | Expert opinions with standardized workflow | STPA could discover additional scenarios involving component interactions. |
| Chatzimichailidou et al. [73] | Injuries and damage | Light rotary | Authority, manufacturer, operators, and automation | STPA could provide a regulatory framework for UAV operations. | |
| Zhang et al. [71] | Accidents in conflict resolution | Unspecified | Operators and automation | The mathematical basis of control feedback is required. | |
| Stádník et al. [128] | Accidents in operation | Specific category | Authority, manufacturer, operators, and service supplier | The system requirements of STPA could be utilized to modify the SORA. |
| Reference | Encounter Objects | Focus | Position Uncertainty | Main Conclusions |
|---|---|---|---|---|
| McFadyen et al. [82] | Unspecified UAS/CPA | Region around airports | Surveillance data of CPA and four typical distributions. | Navigational error should be considered in collision risk assessment. |
| Zhang et al. [87] | Small UAS/CPA | Region around airports | Surveillance data in ZUCK | The dynamic air geofencing is proposed. |
| Kim et al. [88] | UAS | UAS-specific air corridor | Double exponential distribution with 95% accuracy | A risk-based evaluation method is proposed for airspace capacity. |
| Reference | Encounter Objects | Focus | Position Uncertainty | Shapes | Trajectory Estimation |
|---|---|---|---|---|---|
| Maki et al. [129] | UAS/CPA | Non-restricted area | Gaussian | Cylinder (NMAC, 500 ft, 100 ft) | Sample UAS trajectory data with spatial–temporal offset |
| Kim et al. [92] | UAS/UAS | Structured routes | Gaussian | Cylinder (Well-Clear, 4000 ft, 450 ft) | Constant direction and speed |
| Zhang et al. [94] | UAS/CPA | Region around airports | 3-D Gaussian | Cylinder based on realistic size | Stochastic kinematic model |
| Zou et al. [30] | UAS | Region in urban area | 3-D Gaussian | Cylinder, cuboid, sphere, and ellipsoid | Constant direction and speed |
| Bijjahalli et al. [91] | UAS | All airspace classes | 3-D Gaussian | Cylinder based on CNS inflation | Kinematic model |
| Reference | Encounter Objects | Focus | Collision Determination | Trajectory Estimation |
|---|---|---|---|---|
| Weibel et al. [130] | UAS | Well-Clear separation requirements | Cylinder (NMAC, 500 ft, 100 ft) | MIT Lincoln Laboratory (MIT LL) uncorrelated encounter model |
| Belkhouche et al. [131] | UAS | Operation with free flights | Geometric determination by conditional variables | Stochastic kinematic model |
| Wang et al. [52] | UAS/CPA | Region around airports | Alert zone around CPA | Dynamic model with trust input (acceleration) |
| Weinert et al. [18] | UAS | sNMAC candidates for small UAS | Realistic size | MIT LL uncorrelated encounter model |
| Reference | Failure Modes | Type | Point or Area | Descent Model | Assumptions and Notes |
|---|---|---|---|---|---|
| la Cour-Harbo et al. [100] | Unpremeditated descent scenario (UDS), loss of control (LOC), and controlled flight into terrain (CFIT) | Fixed-wing | Aera (100 cm2, 25 cm2) | Ballistic descent, uncontrolled glide, and flyaway under control (particle dynamics) | Failure happens in the inspection path, and glide radio follows normal distribution. |
| Levasseur et al. [105] | LOC after engine failure | Fixed-wing | Point | 6DOF dynamics model with MC simulation | Uncertainties are driven by turning rate, flight path angle, control surface deflection, and wind. |
| Rudnick-Cohen et al. [107] | LOC after engine failure | Fixed-wing | Point | 6DOF dynamics model with MC simulation | Drag coefficients caused by angular velocities are ignored. |
| Primatesta et al. [104] | UDS, LOC, and CFIT | Fixed-wing and rotary-wing | Aera | Same as [100] with parachute descent | Flight directions are assumed to be distributed uniformly. |
| Lin et al. [106] | LOC | Fixed-wing and rotary-wing | Point | 6DOF dynamic model with MC | Drag coefficients are calculated by the constant frontal area. |
| Che Man et al. [103,132] | Different power propulsion failure modes | Rotary-wing | Point | 6DOF dynamic with system simulation | Crash point estimation should consider the more realistic reliability of UAV parts. |
| Liu et al. [133] | LOC | Fixed-wing and rotary-wing | Area | Same as [100] | Debris impact is considered by possible circle area. |
| Reference | Entity of Risk | Model | Substantiation Data | Assumptions and Notes |
|---|---|---|---|---|
| Yao et al. [110] | Third-party | Empirical building–population gravity model | Multi-sources of census data | The population decreases with the distances from centroids of residential buildings. |
| Awan et al. [109] | Traffic vehicles | Hybrid deep learning with LSTM and CNN | GPS data of taxis and rent bikes | Weather is used as the character for prediction. |
| Pilko et al. [134] | Third-party | Comprehensive distribution model | Census data | Spatiotemporal distribution is determined by categories of regions. |
| Sivakumar et al. [111] | Third-party | Diffusive model simulation | Public transportation data | Random walk is used to illustrate the behavior of the population. |
| Jiao et al. [108] | Third-party | Hybrid deep learning with LSTM and CNN | Census data | The uncovered observation points are calculated by the resampling of data randomly. |
| Pang et al. [40] | Third-party | Same as [110] | Census and public transportation data | The input of population density in public transportation stations is obtained by random forest regression. |
| Reference | Type | Stress Characteristic | Mechanism of Harm | Harm Measure | Assumptions and Notes |
|---|---|---|---|---|---|
| Koh et al. [51] | Quadrotor UAV | Kinetic energy | Blunt trauma | AIS-3 | Practical tests by finite elements model. |
| Rattanagraikanakorn et al. [114] | Quadrotor UAV | HIC and Viscous Criterion (VC) | Relationship between VC and HIC is derived from previous data. | ||
| Zhang et al. [135] | Small rotary UAV | Damage on platform | High-precision model based on dynamic and finite element models. | ||
| Svatý et al. [113] | Quadrotor, fixed-wing UAV | Pure energy, HIC, and AIS (Nij) | Comparison and effectiveness analysis of current safety criterion. |
References
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban Air Mobility: History, Ecosystem, Market Potential, and Challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef] [PubMed]
- Lemardelé, C.; Estrada, M.; Pagès, L.; Bachofner, M. Potentialities of drones and ground autonomous delivery devices for last-mile logistics. Transp. Res. Part E Logist. Transp. Rev. 2021, 149, 102325. [Google Scholar] [CrossRef]
- AL-Dosari, K.; Hunaiti, Z.; Balachandran, W. Systematic Review on Civilian Drones in Safety and Security Applications. Drones 2023, 7, 210. [Google Scholar] [CrossRef]
- ResearchAndMarket. 2022/2023 World Civil Unmanned Aerial Systems Market Profile & Forecast. Available online: https://www.researchandmarkets.com/reports/5685194/20222023-world-civil-unmanned-aerial-systems (accessed on 15 July 2024).
- FortuneBusineesInsights. Unmanned Aerial Vehicle (UAV) Market. Available online: https://www.fortunebusinessinsights.com/industry-reports/unmanned-aerial-vehicle-uav-market-101603 (accessed on 15 July 2024).
- Hadero, H. Amazon Gets FAA Approval to Expand Prime Air Drone Deliveries for Online Orders. Available online: https://fortune.com/2024/05/31/amazon-faa-approval-expand-prime-air-drone-deliveries-online-orders/ (accessed on 15 July 2024).
- FortuneBusineesInsights. Urban Air Mobility (UAM) Market. Available online: https://www.fortunebusinessinsights.com/urban-air-mobility-uam-market-106344 (accessed on 15 July 2024).
- ICAO. Safety Management Manual (SMM), Doc9859; International Civil Aviation Organization: Montréal, QC, Canada, 2009. [Google Scholar]
- FAA/Eurocontrol. FAA/EUROCONTROL ATM Safety Techniques and Toolbox; FAA/Eurocontrol: Brussels, Belgium, 2007. [Google Scholar]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- ICAO. Unmanned Aircraft Systems (UAS); ICAO: Montréal, QC, Canada, 2011. [Google Scholar]
- Clothier, R.A.; Williams, B.P.; Hayhurst, K.J. Managing the Risks Remotely Piloted Aircraft Operations Pose to People and Property on the Ground. Saf. Sci. 2018, 101, 33–47. [Google Scholar] [CrossRef] [PubMed]
- Clothier, R.A.; Williams, B.P.; Fulton, N.L. Structuring the safety case for unmanned aircraft system operations in non-segregated airspace. Saf. Sci. 2015, 79, 213–228. [Google Scholar] [CrossRef]
- Washington, A.; Clothier, R.A.; Silva, J. A review of unmanned aircraft system ground risk models. Prog. Aerosp. Sci. 2017, 95, 24–44. [Google Scholar] [CrossRef]
- FAA. UTM Concept of Operations Version 2.0; Federal Aviation Adminsitration: Washington, DC, USA, 2022. [Google Scholar]
- EASA. Concept of Operations for Drones A Risk Based Approach to Regulation of Unmanned Aircraft; European Aviation Safety Agency: Cologne, Germany, 2015. [Google Scholar]
- Weinert, A.; Alvarez, L.; Owen, M.; Zintak, B. Near Midair Collision Analog for Drones Based on Unmitigated Collision Risk. J. Air Transp. 2022, 30, 37–48. [Google Scholar] [CrossRef]
- Melnyk, R.; Schrage, D.; Volovoi, V.; Jimenez, H. Sense and Avoid Requirements for Unmanned Aircraft Systems Using a Target Level of Safety Approach. Risk Anal. 2014, 34, 1894–1906. [Google Scholar] [CrossRef]
- Nithya, D.S.; Quaranta, G.; Muscarello, V.; Liang, M. Review of Wind Flow Modelling in Urban Environments to Support the Development of Urban Air Mobility. Drones 2024, 8, 147. [Google Scholar] [CrossRef]
- Dai, W.; Quek, Z.H.; Low, K.H. Probabilistic modeling and reasoning of conflict detection effectiveness by tracking systems towards safe urban air mobility operations. Reliab. Eng. Syst. Saf. 2024, 244, 109908. [Google Scholar] [CrossRef]
- Clothier, R.A.; Walker, R. The Safety Risk Management of Unmanned Aircraft Systems. In Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Wang, Q.; Mao, J.; Wei, H.-Y. Reliability Analysis of Multi-rotor UAV Based on Fault Tree and Monte Carlo Simulation. In Advances in Mechanical Design; Springer: Singapore, 2018; pp. 1525–1534. [Google Scholar]
- Blom, H.A.P.; Jiang, C.; Grimme, W.B.A.; Mitici, M.; Cheung, Y.S. Third party risk modelling of Unmanned Aircraft System operations, with application to parcel delivery service. Reliab. Eng. Syst. Saf. 2021, 214, 107788. [Google Scholar] [CrossRef]
- Barr, L.; Newman, R.; Ancel, E.; Belcastro, C.; Foster, J.; Evans, J.; Klyde, D. Preliminary Risk Assessment for Small Unmanned Aircraft Systems. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Guan, X.; Lyu, R.; Shi, H.; Chen, J. A survey of safety separation management and collision avoidance approaches of civil UAS operating in integration national airspace system. Chin. J. Aeronaut. 2020, 33, 2851–2863. [Google Scholar] [CrossRef]
- Allouch, A.; Koubâa, A.; Khalgui, M.; Abbes, T. Qualitative and Quantitative Risk Analysis and Safety Assessment of Unmanned Aerial Vehicles Missions Over the Internet. IEEE Access 2019, 7, 53392–53410. [Google Scholar] [CrossRef]
- FAA. Order 8040.4B, Safety Riks Mangement Policy; Federal Aviation Administration: Washington, DC, USA, 2017. [Google Scholar]
- Netjasov, F.; Janic, M. A review of research on risk and safety modelling in civil aviation. J. Air Transp. Manag. 2008, 14, 213–220. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, H.; Zhong, G.; Liu, H.; Feng, D. Collision probability estimation for small unmanned aircraft systems. Reliab. Eng. Syst. Saf. 2021, 213, 107619. [Google Scholar] [CrossRef]
- la Cour-Harbo, A. Quantifying Risk of Ground Impact Fatalities for Small Unmanned Aircraft. J. Intell. Robot. Syst. 2019, 93, 367–384. [Google Scholar] [CrossRef]
- Xiao, Q.; Li, Y.; Luo, F.; Liu, H. Analysis and assessment of risks to public safety from unmanned aerial vehicles using fault tree analysis and Bayesian network. Technol. Soc. 2023, 73, 102229. [Google Scholar] [CrossRef]
- Abdallah, R.; Kouta, R.; Sarraf, C.; Gaber, J.; Wack, M. Fault tree analysis for the communication of a fleet formation flight of UAVs. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS), Milan, Italy, 20–22 December 2017; pp. 202–206. [Google Scholar]
- Sanz, D.; Valente, J.; del Cerro, J.; Colorado, J.; Barrientos, A. Safe operation of mini UAVs: A review of regulation and best practices. Adv. Robot. 2015, 29, 1221–1233. [Google Scholar] [CrossRef]
- Oh, S.; Yoon, Y. Urban drone operations: A data-centric and comprehensive assessment of urban airspace with a Pareto-based approach. Transp. Res. Part A Policy Pract. 2024, 182, 104034. [Google Scholar] [CrossRef]
- FAA. FAA Safety Management System Manual; Federal Aviation Administration (FAA) Air Traffic Organization, Department of Transportation: Washington, DC, USA, 2022. [Google Scholar]
- Yang, H.-H.; Chang, Y.-H.; Lin, C.-H. A combined approach for selecting drone management strategies based on the ICAO Safety Management System (SMS) components. J. Air Transp. Manag. 2022, 104, 102257. [Google Scholar] [CrossRef]
- Jiang, C. Safety Risk Assessment of Unmanned Aircraft System Operations for Urban Air Mobility. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2023. [Google Scholar]
- Wang, Z.; Li, Y.; Wu, S.; Zhou, Y.; Yang, L.; Xu, Y.; Zhang, T.; Pan, Q. A survey on cybersecurity attacks and defenses for unmanned aerial systems. J. Syst. Archit. 2023, 138, 102870. [Google Scholar] [CrossRef]
- Pang, B.; Hu, X.; Dai, W.; Low, K.H. UAV path optimization with an integrated cost assessment model considering third-party risks in metropolitan environments. Reliab. Eng. Syst. Saf. 2022, 222, 108399. [Google Scholar] [CrossRef]
- FAA. Small Unmanned Aircraft Systems (UAS) Regulations; Part 107; Federal Aviation Administration: Washington, DC, USA, 2020. Available online: https://www.faa.gov/uas/commercial_operators/part_107_airspace_authorizations (accessed on 25 April 2024).
- JARUS. AMC RPAS.1309: Safety Assessment of Remotely Piloted Aircraft Systems; Joint Authorities for Rulemaking of Unmanned System: Cologne, Germany, 2015; Available online: http://jarus-rpas.org/wp-content/uploads/2023/07/jar_04_doc_amc_rpas_1309_issue_2_2.pdf (accessed on 25 April 2024).
- JARUS. Guidelines on Specific Operations Risk Assessment 2.0; Joint Authorities for Rulemaking of Unmanned System: Cologne, Germany, 2022; Available online: http://jarus-rpas.org/wp-content/uploads/2023/07/jar_doc_06_jarus_sora_v2.0.pdf (accessed on 25 April 2024).
- FAA. Advisory Circular: Small Unmanned Aircraft Systems (sUAS). AC 107-2. 2016. Available online: https://www.faa.gov/documentLibrary/media/Advisory_Circular/AC_107-2.pdf (accessed on 25 April 2024).
- FAA. Order 8040.6, Unmanned Aircraft Systems Safety Risk Management Policy; Federal Aviation Administration: Washington, DC, USA, 2018. [Google Scholar]
- Clothier, R.A.; Palmer, J.L.; Walker, R.A.; Fulton, N.L. Definition of an airworthiness certification framework for civil unmanned aircraft systems. Saf. Sci. 2011, 49, 871–885. [Google Scholar] [CrossRef]
- Henderson, I.L. Aviation safety regulations for unmanned aircraft operations: Perspectives from users. Transp. Policy 2022, 125, 192–206. [Google Scholar] [CrossRef]
- Lockhart, A.; While, A.; Marvin, S.; Kovacic, M.; Odendaal, N.; Alexander, C. Making space for drones: The contested reregulation of airspace in Tanzania and Rwanda. Trans. Inst. Br. Geogr. 2021, 46, 850–865. [Google Scholar] [CrossRef]
- Ale, B.J.M.; Bellamy, L.J.; van der Boom, R.; Cooper, J.; Cooke, R.M.; Goossens, L.H.J.; Hale, A.R.; Kurowicka, D.; Morales, O.; Roelen, A.L.C.; et al. Further development of a Causal model for Air Transport Safety (CATS): Building the mathematical heart. Reliab. Eng. Syst. Saf. 2009, 94, 1433–1441. [Google Scholar] [CrossRef]
- Zhong, G.; Du, S.; Zhang, H.; Zhou, J.; Liu, H. Demarcation method of safety separations for sUAV based on collision risk estimation. Reliab. Eng. Syst. Saf. 2024, 242, 109738. [Google Scholar] [CrossRef]
- Koh, C.H.; Low, K.H.; Li, L.; Zhao, Y.; Deng, C.; Tan, S.K.; Chen, Y.; Yeap, B.C.; Li, X. Weight threshold estimation of falling UAVs (Unmanned Aerial Vehicles) based on impact energy. Transp. Res. Part C Emerg. Technol. 2018, 93, 228–255. [Google Scholar] [CrossRef]
- Wang, C.H.J.; Tan, S.K.; Low, K.H. Collision risk management for non-cooperative UAS traffic in airport-restricted airspace with alert zones based on probabilistic conflict map. Transp. Res. Part C Emerg. Technol. 2019, 109, 19–39. [Google Scholar] [CrossRef]
- ISO 31000; Risk Management—Principles and Guidelines. International Organization for Standardization: Geneva, Switzerland, 2018.
- Wang, N.; Mutzner, N.; Blanchet, K. Societal acceptance of urban drones: A scoping literature review. Technol. Soc. 2023, 75, 102377. [Google Scholar] [CrossRef]
- Pyrgies, J. The UAVs threat to airport security: Risk analysis and mitigation. J. Airl. Airpt. Manag. 2019, 9, 63. [Google Scholar] [CrossRef]
- Lin, X.; Fulton, N.L.; Horn, M.E.T. Quantification of High Level Safety Criteria for Civil Unmanned Aircraft Systems. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014; pp. 1–13. [Google Scholar]
- Clothier, R.A.; Williams, B.; Washington, A. Development of a Template Safety Case for Unmanned Aircraft Operations over Populous Areas. In Proceedings of the SAE AeroTech 2015 Congress and Exhibit, Seattle, WA, USA, 22–24 September 2015. [Google Scholar]
- Denney, E.; Pai, G.; Johnson, M. Towards a Rigorous Basis for Specific Operations Risk Assessment of UAS. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar]
- Pang, B.; Zhang, M.; Deng, C.; Low, K.H. Investigation of Flight Technical Error for UAV Separation Requirement Based on Flight Trajectory Data. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar]
- Francis Enomoto, D.B.; Denney, E.; Pai, G.; Schumann, J. Preliminary Recommendations for the Collection, Storage, and Analysis of UAS Safety Data; NASA: Boston, CA, USA, 2013. [Google Scholar]
- Kuchar, J.K. Safety Analysis Methodology for Unmanned Aerial Vehicle (UAV) Collision Avoidance System. In Proceedings of the USA/Europe Air Traffic Management Seminar, Baltimore, MD, USA, 27–30 June 2005. [Google Scholar]
- Melnyk, R.; Schrage, D.; Volovoi, V.; Jimenez, H. A third-party casualty risk model for unmanned aircraft system operations. Reliab. Eng. Syst. Saf. 2014, 124, 105–116. [Google Scholar] [CrossRef]
- Ozuncer, D.; Speijker, L.; Stoop, J.A.; Curran, R. Development of a Safety Assessment Methodology for the Risk of Collision of an Unmanned Aircraft System with the Ground. In Proceedings of the Aerospace Technology Conference and Exposition, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Gonçalves, P.; Sobral, J.; Ferreira, L.A. Unmanned aerial vehicle safety assessment modelling through petri Nets. Reliab. Eng. Syst. Saf. 2017, 167, 383–393. [Google Scholar] [CrossRef]
- Vileiniskis, M.; Remenyte-Prescott, R. Quantitative risk prognostics framework based on Petri Net and Bow-Tie models. Reliab. Eng. Syst. Saf. 2017, 165, 62–73. [Google Scholar] [CrossRef]
- Ancel, E.; Capristan, F.M.; Foster, J.V.; Condotta, R.C. Real-time Risk Assessment Framework for Unmanned Aircraft System (UAS) Traffic Management (UTM). In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Han, P.; Yang, X.; Zhao, Y.; Guan, X.; Wang, S. Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network. Sustainability 2022, 14, 5733. [Google Scholar] [CrossRef]
- Zhang, Z.; Hao, M. Failure Mode and Effects Analysis of UAV Power System Based on Generalized Dempster-Shafer Structures. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 334–339. [Google Scholar]
- Freeman, P.; Balas, G.J. Actuation failure modes and effects analysis for a small UAV. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1292–1297. [Google Scholar]
- Osmic, N.; Tahirbegovic, A.; Tahirovic, A.; Bogdan, S. Failure Mode and Effects Analysis for large scale multirotor Unmanned Aerial Vehicle Controlled by Moving Mass System. In Proceedings of the 2018 IEEE International Systems Engineering Symposium (ISSE), Rome, Italy, 1–3 October 2018; pp. 1–8. [Google Scholar]
- Zhang, H.; Gan, X.; Sun, J. Analysis of low alititude UAV conflict resolution safety based on STPA-TOPAZ. Chin. J. Aeronaut. 2022, 43, 262–274. [Google Scholar]
- Chen, J.; Zhang, S.; Lu, Y.; Tang, P. STPA-based hazard analysis of a complex UAV system in take-off. In Proceedings of the 2015 International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 25–28 June 2015; pp. 774–779. [Google Scholar]
- Chatzimichailidou, M.; Karanikas, N.; Plioutsias, A. Application of STPA on Small Drone Operations: A Benchmarking Approach. In Proceedings of the 4th European STAMP Workshop 2016, Zurich, Switzerland, 13–15 September 2017; Volume 179, pp. 13–22. [Google Scholar]
- Lu, Y.; Zhang, S.; Zhang, Z.; Zhang, X.; Tang, P.; Fu, S. Multiple hierarchy risk assessment with hybrid model for safety enhancing of unmanned subscale BWB demonstrator flight test. Chin. J. Aeronaut. 2019, 32, 2612–2626. [Google Scholar] [CrossRef]
- Bandeira, M.C.G.S.P.; Correia, A.R.; Martins, M.R. General model analysis of aeronautical accidents involving human and organizational factors. J. Air Transp. Manag. 2018, 69, 137–146. [Google Scholar] [CrossRef]
- Lu, Y.; Huangfu, H.; Zhang, S.; Fu, S. Organizational Risk Dynamics Archetypes for Unmanned Aerial System Maintenance and Human Error Shaping Factors. In Advances in Human Error, Reliability, Resilience, and Performance; Boring, R.L., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 75–87. [Google Scholar]
- Belzer, J.A. Unmanned Aircraft Systems in the National Airspace System: Establishing Equivalencyin Safety and Training Through a Fault Tree Analysis Approach. Master’s Thesis, Ohio University, Athens, OH, USA, 2017. [Google Scholar]
- Chen, R.C.T.; Mohamed, A.; Badawy, R. An Experimental Study of Human Performance in Controlling Micro Aerial Vehicles in Turbulent Environment. In Proceedings of the Fourth Australasian Unmanned Systems Conference, Melbourne, Australia, 15–16 December 2014. [Google Scholar]
- Clothier, R.A.; Walker, R.A.; Fulton, N.L.; Campbell, D.A. A Casualty Risk Analysis For Unmanned Aerial System (UAS) Operations Over Inhabited Areas. In Proceedings of the Twelfth Australian International Aerospace Congress (AIAC-12), 2nd Australasian Unmanned Air Vehicles Conference, Melbourne, Australia, 19–22 March 2007. [Google Scholar]
- Zhong, J.; Zhang, Y.; Wang, J.; Luo, C.; Miao, Q. Unmanned Aerial Vehicle Flight Data Anomaly Detection and Recovery Prediction Based on Spatio-Temporal Correlation. IEEE Trans. Reliab. 2022, 71, 457–468. [Google Scholar] [CrossRef]
- Mendes, N.; Geraldo Vidal Vieira, J.; Patrícia Mano, A. Risk management in aviation maintenance: A systematic literature review. Saf. Sci. 2022, 153, 105810. [Google Scholar] [CrossRef]
- McFadyen, A.; Martin, T. Understanding Vertical Collision Risk and Navigation Performance for Unmanned Aircraft. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar]
- Mitici, M.; Blom, H.A.P. Mathematical Models for Air Traffic Conflict and Collision Probability Estimation. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1052–1068. [Google Scholar] [CrossRef]
- Reich, P.G. Analysis of Long-Range Air Traffic Systems: Separation Standards—I. J. Navig. 1966, 19, 88–98. [Google Scholar] [CrossRef]
- McFadyen, A.; Martin, T.; Perez, T. Low-level collision risk modelling for unmanned aircraft integration and management. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–10. [Google Scholar]
- McFadyen, A. Probabilistic Determination of Maximum Safe Altitudes for Unmanned Traffic Management. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–10. [Google Scholar]
- Zhang, J.; Zou, X.; Wu, Q.; Xie, F.; Liu, W. Empirical study of airport geofencing for unmanned aircraft operation based on flight track distribution. Transp. Res. Part C Emerg. Technol. 2020, 121, 102881. [Google Scholar] [CrossRef]
- Kim, Y.; Bae, J. Risk-Based UAV Corridor Capacity Analysis above a Populated Area. Drones 2022, 6, 221. [Google Scholar] [CrossRef]
- Paielli, R.A.; Erzberger, H. Conflict Probability Estimation for Free Flight. J. Guid. Control Dyn. 1997, 20, 588–596. [Google Scholar] [CrossRef]
- Bijjahalli, S.; Gardi, A.; Pongsakornsathien, N.; Sabatini, R. A Unified Collision Risk Model for Unmanned Aircraft Systems. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–10. [Google Scholar]
- Bijjahalli, S.; Gardi, A.; Pongsakornsathien, N.; Sabatini, R.; Kistan, T. A Unified Airspace Risk Management Framework for UAS Operations. Drones 2022, 6, 184. [Google Scholar] [CrossRef]
- Kim, S.H. Conflict Risk Assessment of Structured and Unstructured Traffic of Small Unmanned Aircraft Systems. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Zou, Y.; Zhang, H.; Dikun, F.; Liu, H.; Zhong, G. Fast Collision Detection for Small Unmanned Aircraft Systems in Urban Airspace. IEEE Access 2021, 9, 16630–16641. [Google Scholar] [CrossRef]
- Zhang, N.; Liu, H.; Ng, B.F.; Low, K.H. Collision probability between intruding drone and commercial aircraft in airport restricted area based on collision-course trajectory planning. Transp. Res. Part C Emerg. Technol. 2020, 120, 102736. [Google Scholar] [CrossRef]
- Wang, C.H.J.; Tan, S.K.; Low, K.H. Three-dimensional (3D) Monte-Carlo modeling for UAS collision risk management in restricted airport airspace. Aerosp. Sci. Technol. 2020, 105, 105964. [Google Scholar] [CrossRef]
- Lester, E.T.; Weinert, A. Three Quantitative Means to Remain Well Clear for Small UAS in the Terminal Area. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–17. [Google Scholar]
- RCTA. SC-147, Traffic Alert & Collision Avoidance System (TCAS); Radio Technical Commission for Aeronautics: Washington, DC, USA, 2023. [Google Scholar]
- la Cour-Harbo, A.; Schioler, H. Probability of Low-Altitude Midair Collision Between General Aviation and Unmanned Aircraft. Risk Anal. 2019, 39, 2499–2513. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.H.J.; Ng, E.M.; Low, K.H. Investigation and Modeling of Flight Technical Error (FTE) Associated With UAS Operating With and Without Pilot Guidance. IEEE Trans. Veh. Technol. 2021, 70, 12389–12401. [Google Scholar] [CrossRef]
- la Cour-Harbo, A. Quantifying risk of ground impact fatalities of power line inspection BVLOS flight with small unmanned aircraft. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1352–1360. [Google Scholar]
- Levasseur, B.; Bertrand, S.; Raballand, N. Efficient Generation of Ground Impact Probability Maps by Neural Networks for Risk Analysis of UAV Missions. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1398–1406. [Google Scholar]
- Morio, J.; Levasseur, B.; Bertrand, S. Drone Ground Impact Footprints with Importance Sampling: Estimation and Sensitivity Analysis. Appl. Sci. 2021, 11, 3871. [Google Scholar] [CrossRef]
- Che Man, M.H.; Kumar Sivakumar, A.; Hu, H.; Huat Low, K. Ground Crash Area Estimation of Quadrotor Aircraft Under Propulsion Failure. J. Air Transp. 2023, 31, 98–112. [Google Scholar] [CrossRef]
- Primatesta, S.; Rizzo, A.; la Cour-Harbo, A. Ground Risk Map for Unmanned Aircraft in Urban Environments. J. Intell. Robot. Syst. 2020, 97, 489–509. [Google Scholar] [CrossRef]
- Levasseur, B.; Bertrand, S.; Raballand, N.; Viguier, F.; Goussu, G. Accurate Ground Impact Footprints and Probabilistic Maps for Risk Analysis of UAV Missions. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar]
- Lin, C.E.; Shao, P.-C. Failure Analysis for an Unmanned Aerial Vehicle Using Safe Path Planning. J. Aerosp. Inf. Syst. 2020, 17, 358–369. [Google Scholar] [CrossRef]
- Rudnick-Cohen, E.; Herrmann, J.W.; Azarm, S. Modeling Unmanned Aerial System (UAS) Risks via Monte Carlo Simulation. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 1296–1305. [Google Scholar]
- Jiao, Q.; Liu, Y.; Zheng, Z.; Sun, L.; Bai, Y.; Zhang, Z.; Sun, L.; Ren, G.; Zhou, G.; Chen, X.; et al. Ground Risk Assessment for Unmanned Aircraft Systems Based on Dynamic Model. Drones 2022, 6, 324. [Google Scholar] [CrossRef]
- Awan, N.; Ali, A.; Khan, F.; Zakarya, M.; Alturki, R.; Kundi, M.; Alshehri, M.D.; Haleem, M. Modeling Dynamic Spatio-Temporal Correlations for Urban Traffic Flows Prediction. IEEE Access 2021, 9, 26502–26511. [Google Scholar] [CrossRef]
- Yao, Y.; Liu, X.; Li, X.; Zhang, J.; Liang, Z.; Mai, K.; Zhang, Y. Mapping fine-scale population distributions at the building level by integrating multisource geospatial big data. Int. J. Geogr. Inf. Sci. 2017, 31, 1220–1244. [Google Scholar] [CrossRef]
- Sivakumar, A.K.; Che Man, M.H.; Low, K.H. Spatiotemporal Population Movement for Ground Risk of Unmanned Aerial Vehicles (UAVs) in Urbanized Environments using Public Transportation Data. In AIAA AVIATION 2022 Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar]
- Arterburn, D.; Ewing, M.; Prabhu, R.; Zhu, F.; Francis, D. FAA UAS Center of Excellence Task A4: UAS Ground Collision Severity Evaluation; Federal Aviation Administration: Washington, DC, USA, 2017. [Google Scholar]
- Svatý, Z.; Nouzovský, L.; Mičunek, T.; Frydrýn, M. Evaluation of the drone-human collision consequences. Heliyon 2022, 8, e11677. [Google Scholar] [CrossRef] [PubMed]
- Rattanagraikanakorn, B.; Blom, H.A.; Sharpanskykh, A.; de Wagter, C.; Jiang, C.; Schuurman, M.J.; Gransden, D.I.; Happee, R. Modeling and Simulating Human Fatality due to Quadrotor UAS Impact. In AIAA AVIATION 2020 FORUM; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020. [Google Scholar]
- Rubio-Hervas, J.; Gupta, A.; Ong, Y.-S. Data-driven risk assessment and multicriteria optimization of UAV operations. Aerosp. Sci. Technol. 2018, 77, 510–523. [Google Scholar] [CrossRef]
- Kasprzyk, P.J.; Konert, A. Reporting and Investigation of Unmanned Aircraft Systems (UAS) Accidents and Serious Incidents. Regulatory Perspective. J. Intell. Robot. Syst. 2021, 103, 3. [Google Scholar] [CrossRef]
- EUdroneport. SORA 2.5 Methodology—Specific Operation Risk Assessment. Available online: https://eudroneport.com/blog/sora-2-5/ (accessed on 25 April 2024).
- Ziakkas, D.; Pechlivanis, K. Artificial intelligence applications in aviation accident classification: A preliminary exploratory study. Decis. Anal. J. 2023, 9, 100358. [Google Scholar] [CrossRef]
- EASA. Artificial Intelligence Roadmap 2.0; European Union Aviation Safety Agency: Cologne, Germany, 2023. [Google Scholar]
- Aláez, D.; Lopez-Iturri, P.; Celaya-Echarri, M.; Azpilicueta, L.; Falcone, F.; Villadangos, J.; Astrain, J.J. Digital twin modeling of open category UAV radio communications: A case study. Comput. Netw. 2024, 242, 110276. [Google Scholar] [CrossRef]
- Tepylo, N.; Straubinger, A.; Laliberte, J. Public perception of advanced aviation technologies: A review and roadmap to acceptance. Prog. Aerosp. Sci. 2023, 138, 100899. [Google Scholar] [CrossRef]
- Ferreira, R.B.; Baum, D.M.; Neto, E.C.P.; Martins, M.R.; Almeida, J.R.; Cugnasca, P.S.; Camargo, J.B. A Risk Analysis of Unmanned Aircraft Systems (UAS) Integration into non-Segregate Airspace. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 42–51. [Google Scholar]
- Weibel, R.; John, H.R. An Integrated Approach to Evaluating Risk Mitigation Measures for UAV Operational Concepts in the NAS. In Proceedings of the AIAA’s 4th Infotech@Aerospace Conference, Arlington, VA, USA, 26–29 September 2005. [Google Scholar]
- Clothier, R.A.; Walker, R.A. Determination and Evaluation of UAV Safety Objectives. In Proceedings of the 21st International Unmanned Air Vehicle Systems Conference, Bristol, UK, 9–12 May 2006. [Google Scholar]
- Zhang, Y.; Zhang, S.; Liu, X. Estimated method of target level of safety for unmanned aircraft system. J. Aerosp. Power 2018, 33, 1017–1024. [Google Scholar]
- Luxhøj, J.T. A Socio-technical Model for Analyzing Safety Risk of Unmanned Aircraft Systems (UAS): An Application to Precision Agriculture. Procedia Manuf. 2015, 3, 928–935. [Google Scholar] [CrossRef]
- Tyagi, A.; Zhang, Y.; Toussaint, S.; Luxhoj, J.T. Strategies to Model System Risk Using UAS Safety Analysis Model (USAM). In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Stádník, J.; Hulínská, Š.; Kraus, J. Comparison of Methods for the Safety Evaluation of UAS Operation. Transp. Res. Procedia 2022, 65, 78–85. [Google Scholar] [CrossRef]
- Maki, E.; Weinert, A.; Kochenderfer, M. Efficiently Estimating Ambient Near Mid-Air Collision Risk for Unmanned Aircraft*. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar]
- Weibel, R.; Edwards, M.; Fernandes, C. Establishing a Risk-Based Separation Standard for Unmanned Aircraft Self Separation. In Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Virginia Beach, VA, USA, 20–22 September 2011. [Google Scholar]
- Belkhouche, F. Modeling and Calculating the Collision Risk for Air Vehicles. IEEE Trans. Veh. Technol. 2013, 62, 2031–2041. [Google Scholar] [CrossRef]
- Che Man, M.H.; Haoliang, H.; Low, K.H. Crash Area Estimation for Ground Risk of Small Unmanned Aerial Vehicles Due to Propulsion System Failures. In AIAA SCITECH 2022 Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar]
- Liu, Y.; Zhu, Y.; Wang, Z.; Zhang, X.; Li, Y. Ground Risk Estimation of Unmanned Aerial Vehicles Based on Probability Approximation for Impact Positions with Multi-Uncertainties. Electronics 2023, 12, 829. [Google Scholar] [CrossRef]
- Pilko, A.; Sóbester, A.; Scanlan, J.P.; Ferraro, M. Spatiotemporal Ground Risk Mapping for Uncrewed Aerial Systems operations. In AIAA SCITECH 2022 Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar]
- Zhang, Y.; Huang, Y.; Liang, K.; Cao, K.; Wang, Y.; Liu, X.; Guo, Y.; Wang, J. High-precision modeling and collision simulation of small rotor UAV. Aerosp. Sci. Technol. 2021, 118, 106977. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| Literature | Focus | Categorization Method | Content Type | Quantitative |
|---|---|---|---|---|
| Clothier et al. [22] | High-level introduction of the normative workflow of SRMP | Sub-process of SRMP | Theoretical | 🗴 |
| Sanz et al. [34] * | Global assessment approach of SRMP with integral rationales | Origin-oriented or relation-oriented analytical perspective | Theoretical and analytical | 🗴 |
| Washington et al. [15] | UAS ground risk modelling and supports for regulations | Sub-models based on ground risk propagation | Theoretical and analytical | ✓ |
| Allouch et al. [27] * | Combination of SRMP and quantitative causal model (Bayesian network) | Qualitative and quantitative risk metrics | Theoretical and empirical | ✓ |
| Guan et al. [26] | UAS air risk modelling for separation and conflict management | Modelling approaches of collision probability | Analytical | ✓ |
| Low Risk | Medium Risk | High Risk | |
|---|---|---|---|
| EASA/JARUS | Open (not required) | Specific (SORA) [43] | Certified (AMC RPAS.1309) [42] |
| FAA | Recreational (not required) | Work/business (advisory circular 107-2) [44] | Advanced (Order 8040.4B, 8040.6, ATO SMS manual) [28,36,45] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, S.; Zhong, G.; Wang, F.; Pang, B.; Zhang, H.; Jiao, Q. Safety Risk Modelling and Assessment of Civil Unmanned Aircraft System Operations: A Comprehensive Review. Drones 2024, 8, 354. https://doi.org/10.3390/drones8080354
Du S, Zhong G, Wang F, Pang B, Zhang H, Jiao Q. Safety Risk Modelling and Assessment of Civil Unmanned Aircraft System Operations: A Comprehensive Review. Drones. 2024; 8(8):354. https://doi.org/10.3390/drones8080354
Chicago/Turabian StyleDu, Sen, Gang Zhong, Fei Wang, Bizhao Pang, Honghai Zhang, and Qingyu Jiao. 2024. "Safety Risk Modelling and Assessment of Civil Unmanned Aircraft System Operations: A Comprehensive Review" Drones 8, no. 8: 354. https://doi.org/10.3390/drones8080354
APA StyleDu, S., Zhong, G., Wang, F., Pang, B., Zhang, H., & Jiao, Q. (2024). Safety Risk Modelling and Assessment of Civil Unmanned Aircraft System Operations: A Comprehensive Review. Drones, 8(8), 354. https://doi.org/10.3390/drones8080354