A Distributed Task Allocation Method for Multi-UAV Systems in Communication-Constrained Environments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation and Baseline PI Algorithm
2.1. Problem Formulation
2.2. Baseline PI Algorithm
| Algorithm 1 Task allocation procedure for the baseline PI algorithm running on UAV i. |
| Initilize |
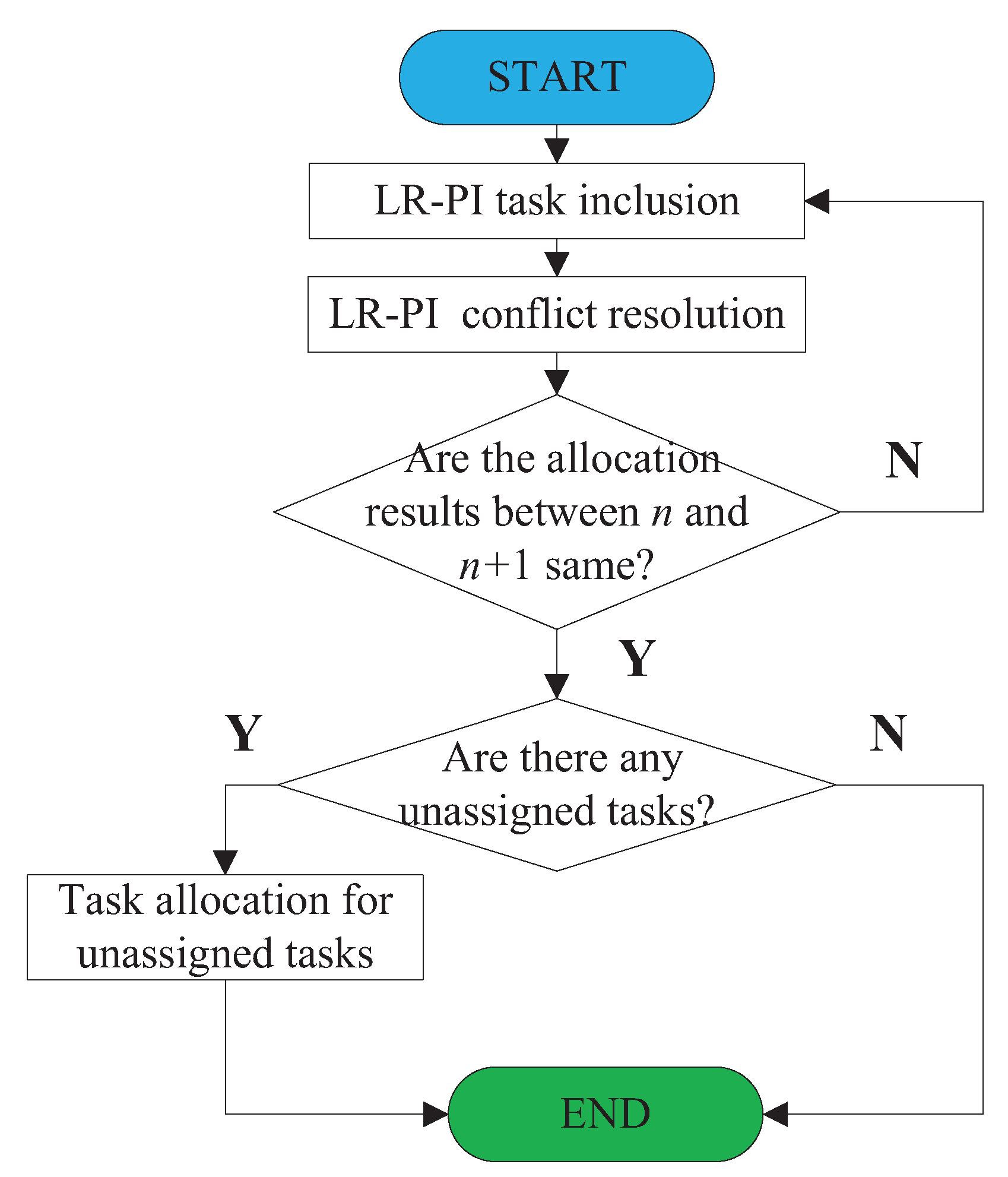
3. Local Reassignment PI Algorithm
3.1. LR-PI Task Inclusion Phase
| Algorithm 2 LR-PI task inclusion phase for UAV. |
3.2. LR-PI Communication and Conflict Resolution Phase
| Algorithm 3 LR-PI conflict resolution phase for UAV. |
3.3. Reassignment for Unallocated Tasks
3.4. Communication Model
3.4.1. Package Loss Model
3.4.2. Bit Error Model
3.4.3. Time Delay Model
3.5. Convergence Analysis
4. Simulations
4.1. Feasibility of LR-PI Algorithm
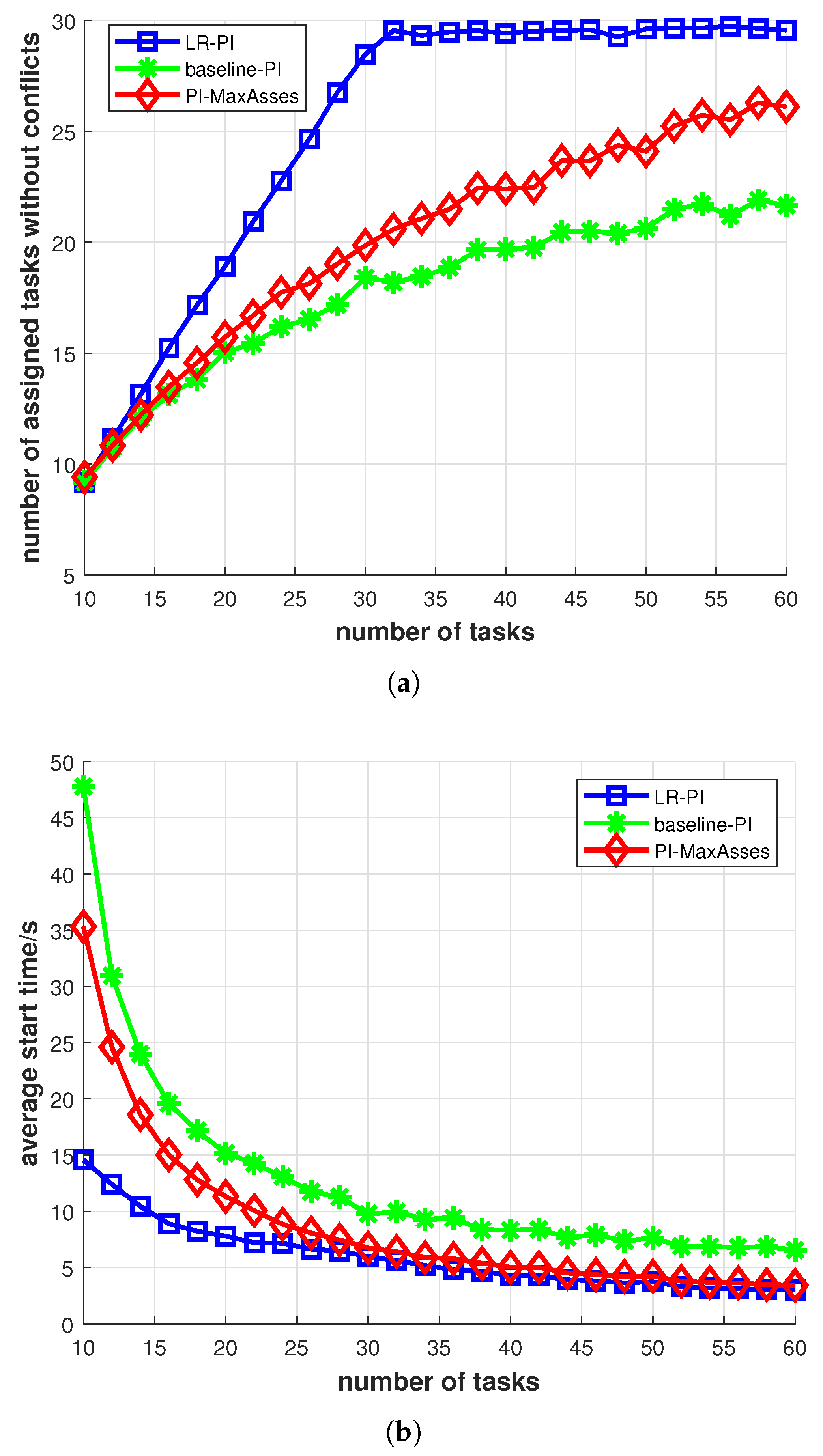
4.2. Validation of LR-PI Algorithm
4.3. The Influence of Package Loss
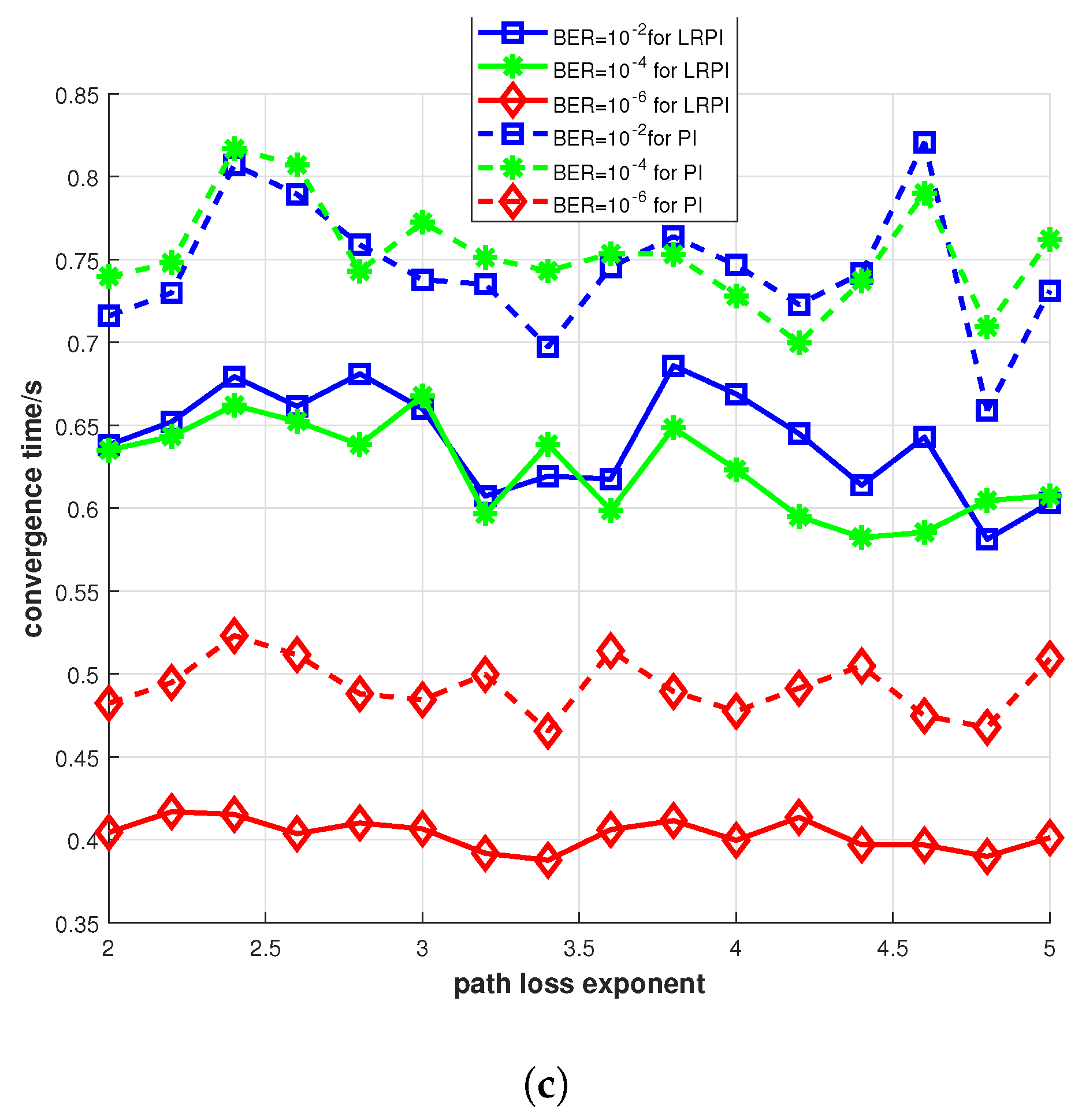
4.4. The Influence of Bit Error Rate
4.5. The Influence of Max Bid Wait Time
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hunt, S.; Meng, Q.; Hinde, C.; Huang, T. A Consensus-Based Grouping Algorithm for Multi-agent Cooperative Task Allocation with Complex Requirements. Cogn. Comput. 2014, 6, 338–350. [Google Scholar] [CrossRef] [PubMed]
- Qamar, R.A.; Sarfraz, M.; Ghauri, S.A.; Mahmood, A. TRMaxAlloc: Maximum task allocation using reassignment algorithm in multi-UAV system. Comput. Commun. 2023, 206, 110–123. [Google Scholar] [CrossRef]
- Wang, J.; Duan, S.; Ju, S.; Lu, S.; Jin, Y. Evolutionary task allocation and cooperative control of unmanned aerial vehicles in air combat applications. Robotics 2022, 11, 124. [Google Scholar] [CrossRef]
- Zhao, W.; Meng, Q.; Chung, P.W. A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans. Cybern. 2015, 46, 902–915. [Google Scholar] [CrossRef]
- Qamar, R.A.; Sarfraz, M.; Rahman, A.; Ghauri, S.A. Multi-criterion multi-UAV task allocation under dynamic conditions. J. King Saud Univ.-Comput. Inf. Sci. 2023, 35, 101734. [Google Scholar] [CrossRef]
- Yan, S.; Xia, Y. Research on Collaborative Task Allocation of Heterogeneous UAVs with Complex Constraints. IEEE Access 2023, 11, 112451–112469. [Google Scholar] [CrossRef]
- Turner, J.; Meng, Q.; Schaefer, G.; Whitbrook, A.; Soltoggio, A. Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Trans. Cybern. 2017, 48, 2583–2597. [Google Scholar] [CrossRef]
- Cao, Y.; Long, T.; Sun, J.; Wang, Z.; Xu, G. Comparison of Distributed Task Allocation Algorithms Considering Non-ideal Communication Factors for Multi-UAV Collaborative Visit Missions. IEEE Robot. Autom. Lett. 2023; early access. [Google Scholar]
- Yan, Y.; Mostofi, Y. Robotic router formation in realistic communication environments. IEEE Trans. Robot. 2012, 28, 810–827. [Google Scholar] [CrossRef]
- Peng, Q.; Wu, H.; Xue, R. Review of dynamic task allocation methods for UAV swarms oriented to ground targets. Complex Syst. Model. Simul. 2021, 1, 163–175. [Google Scholar] [CrossRef]
- Seenu, N.; RM, K.C.; Ramya, M.M.; Janardhanan, M.N. Review on state-of-the-art dynamic task allocation strategies for multiple-robot systems. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 929–942. [Google Scholar]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912–926. [Google Scholar] [CrossRef]
- Whitbrook, A.; Meng, Q.; Chung, P.W. A novel distributed scheduling algorithm for time-critical multi-agent systems. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 6451–6458. [Google Scholar]
- Whitbrook, A.; Meng, Q.; Chung, P.W.H. Reliable, Distributed Scheduling and Rescheduling for Time-Critical, Multiagent Systems. IEEE Trans. Autom. Sci. Eng. 2017, 15, 732–747. [Google Scholar] [CrossRef]
- Li, J.; Chen, R. A Distributed Task Scheduling Method Based on Conflict Prediction for Ad Hoc UAV Swarms. Drones 2022, 6, 356. [Google Scholar] [CrossRef]
- Li, J.; Chen, R.; Wang, C.; Chen, Y.; Huang, Y.; Wang, X. A performance-impact based multi-task distributed scheduling algorithm with task removal inference and deadlock avoidance. Auton. Agents Multi-Agent Syst. 2023, 37, 30. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Qiu, Y.; Zhou, J. Consensus-Based Decentralized Task Allocation for Multi-Agent Systems and Simultaneous Multi-Agent Tasks. IEEE Robot. Autom. Lett. 2022, 7, 12593–12600. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Qiu, Y.; Li, S.; Zhou, J. An Efficient Distributed Task Allocation Method for Maximizing Task Allocations of Multirobot Systems. IEEE Trans. Autom. Sci. Eng. 2023; early access. [Google Scholar]
- Yang, M.; Zhang, A.; Bi, W.; Wang, Y. A resource-constrained distributed task allocation method based on a two-stage coalition formation methodology for multi-UAVs. J. Supercomput. 2022, 78, 10025–10062. [Google Scholar] [CrossRef]
- Chakraa, H.; Guérin, F.; Leclercq, E.; Lefebvre, D. Optimization techniques for Multi-Robot Task Allocation problems: Review on the state-of-the-art. Robot. Auton. Syst. 2023, 168, 104492. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Luo, H.; Wu, Y.; Sun, G.; Yu, H.; Guizani, M. ESCM: An efficient and secure communication mechanism for UAV networks. IEEE Trans. Netw. Serv. Manag. 2024, 21, 3124–3139. [Google Scholar] [CrossRef]
- Nayak, S.; Yeotikar, S.; Carrillo, E.; Rudnick-Cohen, E.; Jaffar, M.K.M.; Patel, R.; Azarm, S.; Herrmann, J.W.; Xu, H.; Otte, M. Experimental Comparison of Decentralized Task Allocation Algorithms Under Imperfect Communication. IEEE Robot. Autom. Lett. 2020, 5, 572–579. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, G. A survey on UAV-assisted wireless communications: Recent advances and future trends. Comput. Commun. 2023, 208, 44–78. [Google Scholar] [CrossRef]
- Zhai, W.; Liu, L.; Ding, Y.; Sun, S.; Gu, Y. ETD: An Efficient Time Delay Attack Detection Framework for UAV Networks. IEEE Trans. Inf. Forensics Secur. 2023, 18, 2913–2928. [Google Scholar] [CrossRef]
- Omoniwa, B.; Galkin, B.; Dusparic, I. Communication-enabled deep reinforcement learning to optimise energy-efficiency in UAV-assisted networks. Veh. Commun. 2023, 43, 100640. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, S.; Feng, J.; Pan, F. A Distributed Task Allocation Method for Multi-UAV Systems in Communication-Constrained Environments. Drones 2024, 8, 342. https://doi.org/10.3390/drones8080342
Yan S, Feng J, Pan F. A Distributed Task Allocation Method for Multi-UAV Systems in Communication-Constrained Environments. Drones. 2024; 8(8):342. https://doi.org/10.3390/drones8080342
Chicago/Turabian StyleYan, Shaokun, Jingxiang Feng, and Feng Pan. 2024. "A Distributed Task Allocation Method for Multi-UAV Systems in Communication-Constrained Environments" Drones 8, no. 8: 342. https://doi.org/10.3390/drones8080342
APA StyleYan, S., Feng, J., & Pan, F. (2024). A Distributed Task Allocation Method for Multi-UAV Systems in Communication-Constrained Environments. Drones, 8(8), 342. https://doi.org/10.3390/drones8080342