
Physics-Informed Neural Networks for Unmanned Aerial Vehicle System Estimation

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
1.1. Context
- No need to establish the model structure of the actual system, as the neural network itself serves as a model for network identification.
- It is capable of identifying any linear or nonlinear model.
- The neural network not only serves as a model but is also an actual system achievable through physics.
- The local minimum problem.
- Lengthy training time and slow learning speed.
- Difficulty in extracting ideal training samples.
- Challenges in optimizing the network structure.
- Difficulty in completely solving the convergence problem theoretically for the neural network algorithm.
1.2. Relevant and Related Work
1.3. Original Contributions and Organization
2. Mathematical Model of a Quadrotor
3. System Identification Methods
3.1. Extended Kalman Filter
3.2. Physics-Informed Neural Networks
4. Simulation Results
4.1. PINNs Hyperparameters Tuning
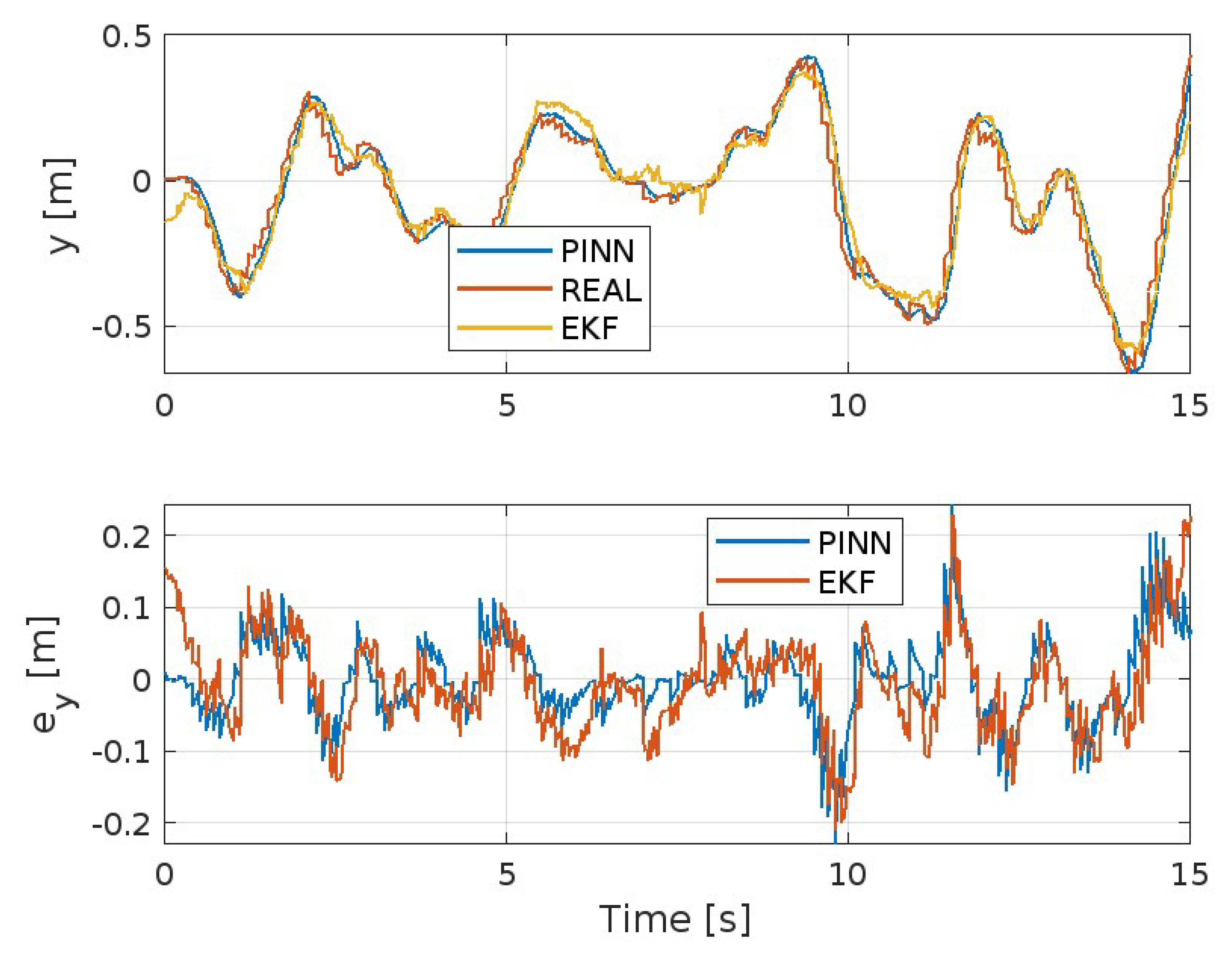
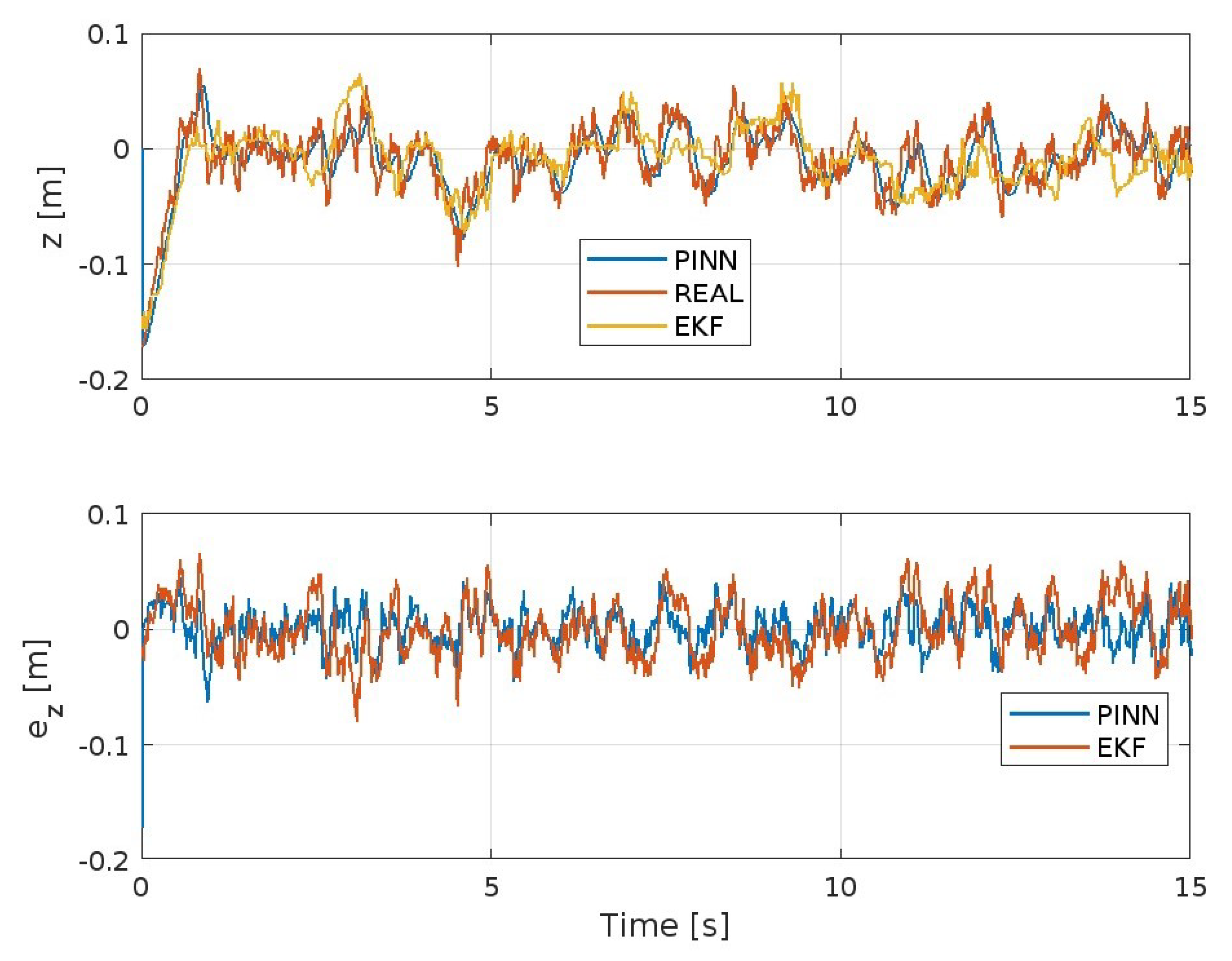
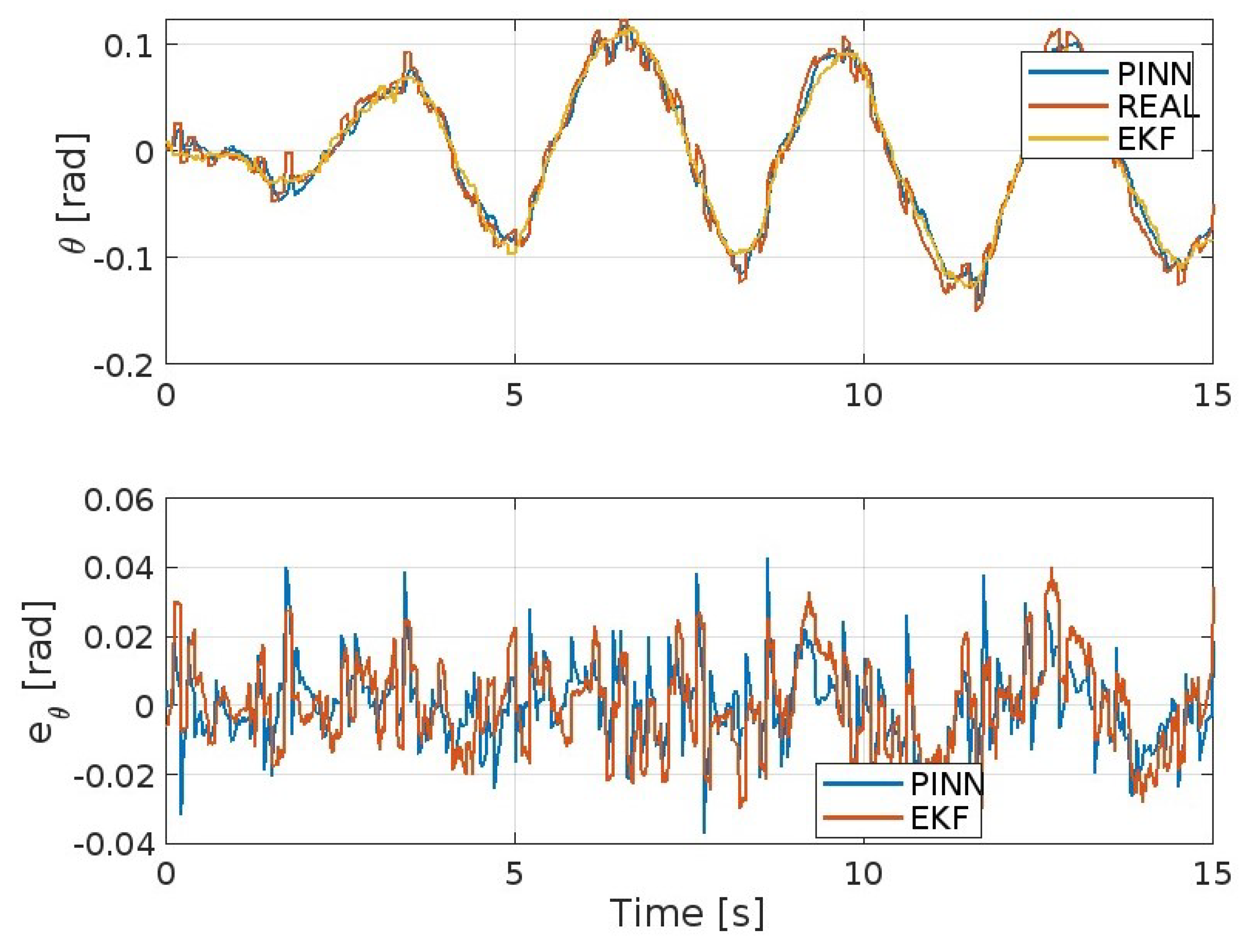
4.2. Model and Performance Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Ricardo, A.R.M.; Jorge, J.L.S. Introducing system identification strategy into Model Predictive Control. J. Syst. Sci. Complex. 2020, 33, 1402–1421. [Google Scholar] [CrossRef]
- Forssell, U.; Lindskog, P. Combining Semi-Physical and Neural Network modeling: An example of its usefulness. IFAC Proc. Vol. 1997, 30, 767–770. [Google Scholar] [CrossRef]
- Fu, L.; Li, P. The Research Survey of System Identification Method. In Proceedings of the 5th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2013; pp. 397–401. [Google Scholar] [CrossRef]
- Gueho, D.; Singla, P.; Majji, M.; Juang, J.-N. Advances in System Identification: Theory and Applications. In Proceedings of the 60th IEEE Conference on Decision and Control, Austin, TX, USA, 14–17 December 2021; pp. 22–30. [Google Scholar] [CrossRef]
- Ho, B.L.; Kalman, R.E. Editorial: Effective construction of linear state-variable models from input/output functions: Die Konstruktion von linearen Modeilen in der Darstellung durch Zustandsvariable aus den Beziehungen für Ein-und Ausgangsgrößen. Automatisierungstechnik 1966, 14, 545–548. [Google Scholar] [CrossRef]
- Kalman, R.E. Mathematical Description of Linear Dynamical Systems. J. Soc. Ind. Appl. Math. Ser. A Control. 1963, 1, 152–192. [Google Scholar] [CrossRef]
- Chen, C.W.; Lee, G.; Juang, J.-N. Several recursive techniques for observer/Kalman filter system identification from data. In Proceedings of the Guidance, Navigation and Control Conference, Hilton Head Island, SC, USA, 10–12 August 1992. [Google Scholar] [CrossRef]
- Germani, A.; Manes, C.; Palumbo, P. Polynomial extended Kalman filter. IEEE Trans. Autom. Control. 2005, 50, 2059–2064. [Google Scholar] [CrossRef]
- Peyada, N.K.; Sen, A.; Ghosh, A.K. Aerodynamic characterization of HANSA-3 aircraft using equation error, maximum likelihood and filter error methods. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, 19–21 March 2008. [Google Scholar] [CrossRef]
- Bianchi, D.; Borri, A.; Di Benedetto, M.D.; Di Gennaro, S. Active Attitude Control of Ground Vehicles with Partially Unknown Model. IFAC-PapersOnLine 2020, 53, 14420–14425. [Google Scholar] [CrossRef]
- Rodrigues, L.; Givigi, S. System Identification and Control Using Quadratic Neural Networks. IEEE Control. Syst. Lett. 2023, 7, 2209–2214. [Google Scholar] [CrossRef]
- Cavone, G.; Epicoco, N.; Carli, R.; Del Zotti, A.; Ribeiro Pereira, J.P.; Dotoli, M. Parcel delivery with drones: Multi-criteria analysis of trendy system architectures. In Proceedings of the 29th Mediterranean Conference on Control and Automation, Puglia, Italy, 22–25 June 2021; pp. 693–698. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Epicoco, N.; Di Ferdinando, M.; Scarabaggio, P.; Dotoli, M. Consensus-Based Algorithms for Controlling Swarms of Unmanned Aerial Vehicles; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; Volume 12338, pp. 84–99. [Google Scholar] [CrossRef]
- Bianchi, D.; Borri, A.; Di Gennaro, S.; Preziuso, M. UAV trajectory control with rule-based minimum-energy reference generation. In Proceedings of the European Control Conference, London, UK, 12–15 July 2022; pp. 1497–1502. [Google Scholar] [CrossRef]
- Stiasny, J.; Misyris, G.S.; Chatzivasileiadis, S. Physics-Informed Neural Networks for Non-linear System Identification for Power System Dynamics. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June–2 July 2021. [Google Scholar] [CrossRef]
- Liu, X.; Cheng, W.; Xing, J.; Chen, X.; Zhao, Z.; Zhang, R.; Huang, Q.; Lu, J.; Zhou, H.; Zheng, W.X.; et al. Physics-Informed Neural Network for system identification of rotors. IFAC-PapersOnLine 2024, 58, 307–312. [Google Scholar] [CrossRef]
- Liu, T.; Meidani, H. Physics-Informed Neural Networks for System Identification of Structural Systems with a Multiphysics Damping Model. J. Eng. Mech. 2023, 149, 04023079. [Google Scholar] [CrossRef]
- Li, H.W.X.; Lu, L.; Cao, Q. Motion estimation and system identification of a moored buoy via Physics-Informed Neural Network. Appl. Ocean. Res. 2023, 138, 103677. [Google Scholar] [CrossRef]
- Malinzi, J.; Gwebu, S.; Motsa, S. Determining COVID-19 Dynamics Using Physics Informed Neural Networks. Axioms 2022, 11, 121. [Google Scholar] [CrossRef]
- D’Ambrosio, A.; Furfaro, R. Learning Fuel-Optimal Trajectories for Space Applications via Pontryagin Neural Networks. Aerospace 2024, 11, 228. [Google Scholar] [CrossRef]
- Singh, V.; Harursampath, D.; Dhawan, S.; Sahni, M.; Saxena, S.; Mallick, R. Physics-Informed Neural Network for Solving a One-Dimensional Solid Mechanics Problem. Modelling 2024, 5, 1532–1549. [Google Scholar] [CrossRef]
- Li, Y.; Liu, L. Physics-Informed Neural Network-Based Nonlinear Model Predictive Control for Automated Guided Vehicle Trajectory Tracking. World Electr. Veh. J. 2024, 15, 460. [Google Scholar] [CrossRef]
- Trahan, C.; Loveland, M.; Dent, S. Quantum Physics-Informed Neural Networks. Entropy 2024, 26, 649. [Google Scholar] [CrossRef] [PubMed]
- Güven, K.; Şamiloğlu, A.T. System Identification of an Aerial Delivery System with a Ram-Air Parachute Using a NARX Network. Aerospace 2022, 9, 443. [Google Scholar] [CrossRef]
- Zheng, X.; Liu, S.; Yu, Z.; Luo, C. A New Method for Dynamical System Identification by Optimizing the Control Parameters of Legendre Multiwavelet Neural Network. Mathematics 2023, 11, 4913. [Google Scholar] [CrossRef]
- Peña-García, R.; Velázquez-Sánchez, R.D.; Gómez-Daza-Argumedo, C.; Escobedo-Alva, J.O.; Tapia-Herrera, R.; Meda-Campaña, J.A. Physics-Based Aircraft Dynamics Identification Using Genetic Algorithms. Aerospace 2024, 11, 142. [Google Scholar] [CrossRef]
- Gu, W.; Primatesta, S.; Rizzo, A. Physics-Informed Neural Network for Quadrotor Dynamical Modeling. Robot. Auton. Syst. 2024, 171, 104569. [Google Scholar] [CrossRef]
- Bianchi, D.; Borri, A.; Cappuzzo, F.; Di Gennaro, S. Quadrotor Trajectory Control Based on Energy-Optimal Reference Generator. Drones 2024, 8, 29. [Google Scholar] [CrossRef]
- Bianchi, D.; Di Gennaro, S.; Di Ferdinando, M.; Lua, C.A. Robust Control of UAV with Disturbances and Uncertainty Estimation. Machines 2023, 11, 352. [Google Scholar] [CrossRef]
- Hughes, P.C. Spacecraft Attitude Dynamics; Dover Publications, Inc.: Mineola, NY, USA, 1986. [Google Scholar]
- Nagaty, A.; Saeedi, S.; Thibault, C.; Seto, M.; Li, H. Control and Navigation Framework for Quadrotor Helicopters. J. Intell. Robot. Syst. 2013, 70, 1–12. [Google Scholar] [CrossRef]
- Fujii, K. Extended Kalman Filter; Refernce Manual; The ACFA-Sim-J Group: Tokyo, Japan, 2013. [Google Scholar]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-Informed Neural Networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Kumar, P.; Batra, S.; Raman, B. Deep neural network hyper-parameter tuning through twofold genetic approach. Soft Comput. 2021, 25, 8747–8771. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyper-Parameter | Hyper-Parameter Values |
|---|---|
| Number of layers | 1, 2, 3, 4, 5 |
| Number of neurons | 32, 64, 128, 256, 512 |
| Activation function | linear, sigmoid, tanh, tanh, relu |
| Learning rate | 0.015 |
| Batch size | 250 |
| Epochs | 1000 |
| Parameter | Value | Units | Known for EKF | Known for PINNs |
|---|---|---|---|---|
| m | 0.65 | kg | YES | NO |
| d | 0.165 | m | YES | NO |
| 0.03 | kg·m2 | NO | NO | |
| 0.025 | kg·m2 | NO | NO | |
| 0.045 | kg·m2 | NO | NO | |
| b | 3.50 | N/rad/s | NO | NO |
| k | 0.06 | N·m/rad/s | NO | NO |
| MAE | MSE | ISE | IAE | ITAE | |
|---|---|---|---|---|---|
| EKF | 0.0514 | 0.0039 | 5.8711 | 77.17 | 599.94 |
| PINNs | 0.0367 | 0.0022 | 3.3427 | 55.07 | 432.52 |
| MAE | MSE | ISE | IAE | ITAE | |
|---|---|---|---|---|---|
| EKF | 0.0533 | 0.0047 | 7.0927 | 79.96 | 638.23 |
| PINNs | 0.0426 | 0.0033 | 4.8822 | 64 | 543.46 |
| MAE | MSE | ISE | IAE | ITAE | |
|---|---|---|---|---|---|
| EKF | 0.0198 | 5.85 | 0.8786 | 29.71 | 229.05 |
| PINNs | 0.0135 | 2.99 | 0.4491 | 20.3 | 147.99 |
| MAE | MSE | ISE | IAE | ITAE | |
|---|---|---|---|---|---|
| EKF | 0.0133 | 4.4527 | 0.4204 | 20.02 | 163.38 |
| PINNs | 0.0103 | 2.801 | 0.2656 | 15.44 | 128.97 |
| MAE | MSE | ISE | IAE | ITAE | |
|---|---|---|---|---|---|
| EKF | 0.0107 | 1.81 | 0.2718 | 16.11 | 130.64 |
| PINNs | 0.0085 | 1.27 | 0.1838 | 12.78 | 102.45 |
| MAE | MSE | ISE | IAE | ITAE | |
|---|---|---|---|---|---|
| EKF | 0.0234 | 8.92 | 0.7541 | 35.07 | 269.87 |
| PINNs | 0.0149 | 5.53 | 0.5828 | 22.39 | 170.66 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bianchi, D.; Epicoco, N.; Di Ferdinando, M.; Di Gennaro, S.; Pepe, P. Physics-Informed Neural Networks for Unmanned Aerial Vehicle System Estimation. Drones 2024, 8, 716. https://doi.org/10.3390/drones8120716
Bianchi D, Epicoco N, Di Ferdinando M, Di Gennaro S, Pepe P. Physics-Informed Neural Networks for Unmanned Aerial Vehicle System Estimation. Drones. 2024; 8(12):716. https://doi.org/10.3390/drones8120716
Chicago/Turabian StyleBianchi, Domenico, Nicola Epicoco, Mario Di Ferdinando, Stefano Di Gennaro, and Pierdomenico Pepe. 2024. "Physics-Informed Neural Networks for Unmanned Aerial Vehicle System Estimation" Drones 8, no. 12: 716. https://doi.org/10.3390/drones8120716
APA StyleBianchi, D., Epicoco, N., Di Ferdinando, M., Di Gennaro, S., & Pepe, P. (2024). Physics-Informed Neural Networks for Unmanned Aerial Vehicle System Estimation. Drones, 8(12), 716. https://doi.org/10.3390/drones8120716