



Acoustic SLAM Based on the Direction-of-Arrival and the Direct-to-Reverberant Energy Ratio
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
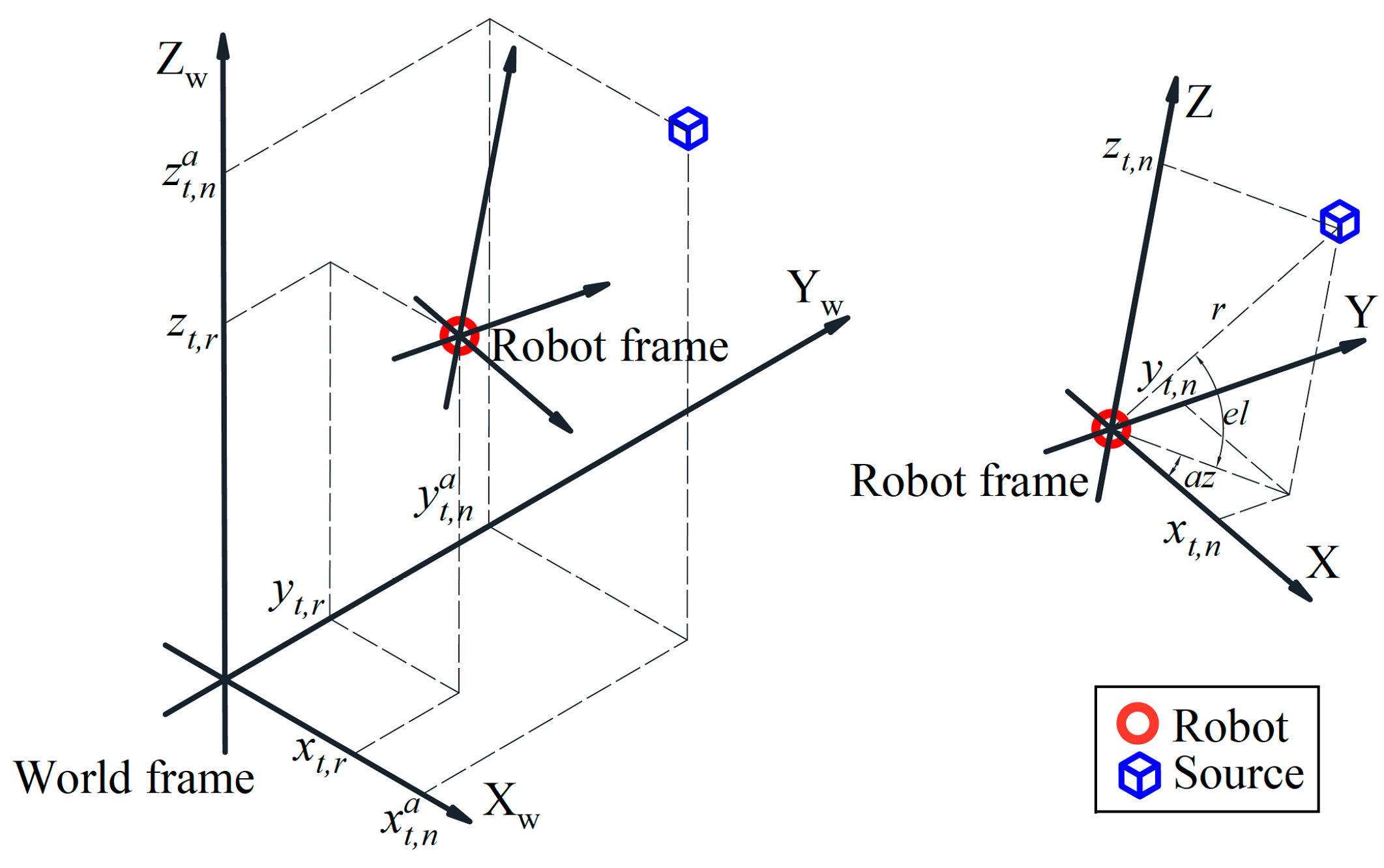
2. Problem Formulation
- (1)
- (2)
- The velocity and orientation are measured using an IMU, whose velocity measurement noise is non-Gaussian and nonlinear. This kind of noise is common in real instruments and cannot be simply removed with a traditional Kalman filter or even an extended Kalman filter (EKF) by fusing DoA measurements due to its strong nonlinearity.
- (3)
- The distance estimation and the DoA measurement usually intermingle with strong noise and disturbances, causing a few incorrect estimations of the sound source position, leading to no convergence.
- (4)
- The critical distance, which is essential for the estimation of the distance from the DRR, is usually calculated with the acoustic coefficients and geometry of the room. However, these parameters are unknown in our situation.
3. Background Knowledge about IMU Preintegration and DRR
3.1. IMU Preintegration
3.2. DRR Computing and Distance Estimator
4. Mapping and Locating
4.1. Mapping
4.2. Locating
4.3. Posterior PDF of the D-D SLAM
| Algorithm 1: D-D SLAM | ||||||||
| Data: DoAs Ωt, DRR ηt, IMU Measure yt | ||||||||
| for i = 1, …, I do | ||||||||
| Compute using (13)(14)(15); | ||||||||
| Compute KeyFrame factor using (21)(22); | ||||||||
| if KeyFrame then | ||||||||
| Compute , using (34)(33)(32); | ||||||||
| for m = 1, …, Mt do | ||||||||
| Predict , using (35); | ||||||||
| Compute using (36); | ||||||||
| for µ = 1, …, B do | ||||||||
| Evaluate , using (37)(38); | ||||||||
| Compute using (41); | ||||||||
| end | ||||||||
| end | ||||||||
| Update Covt,m using (45); | ||||||||
| Update , using (42)(43); | ||||||||
| Evaluate using (46); | ||||||||
| Compute using the mapping method [7] by feeding the date of keyframe; | ||||||||
| GM reduction of mapping [27]; | ||||||||
| Evaluate (Ωt | rt, dc) using (26); | ||||||||
| Evaluate using (50); | ||||||||
| Update particle state; | ||||||||
| else | ||||||||
| Update , using (34)(33)(32); | ||||||||
| end | ||||||||
| end | ||||||||
| Resampling [28]; | ||||||||
5. Simulation and Experiment Setup
5.1. Simulation Setup
5.2. Experiment Setup
5.3. Performance Metric
6. The Results
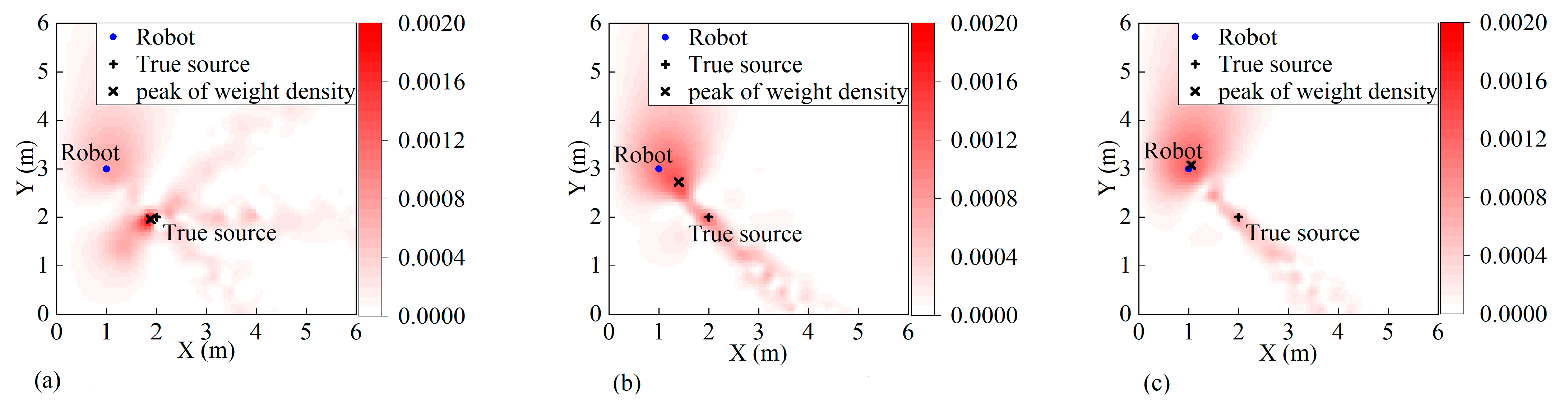
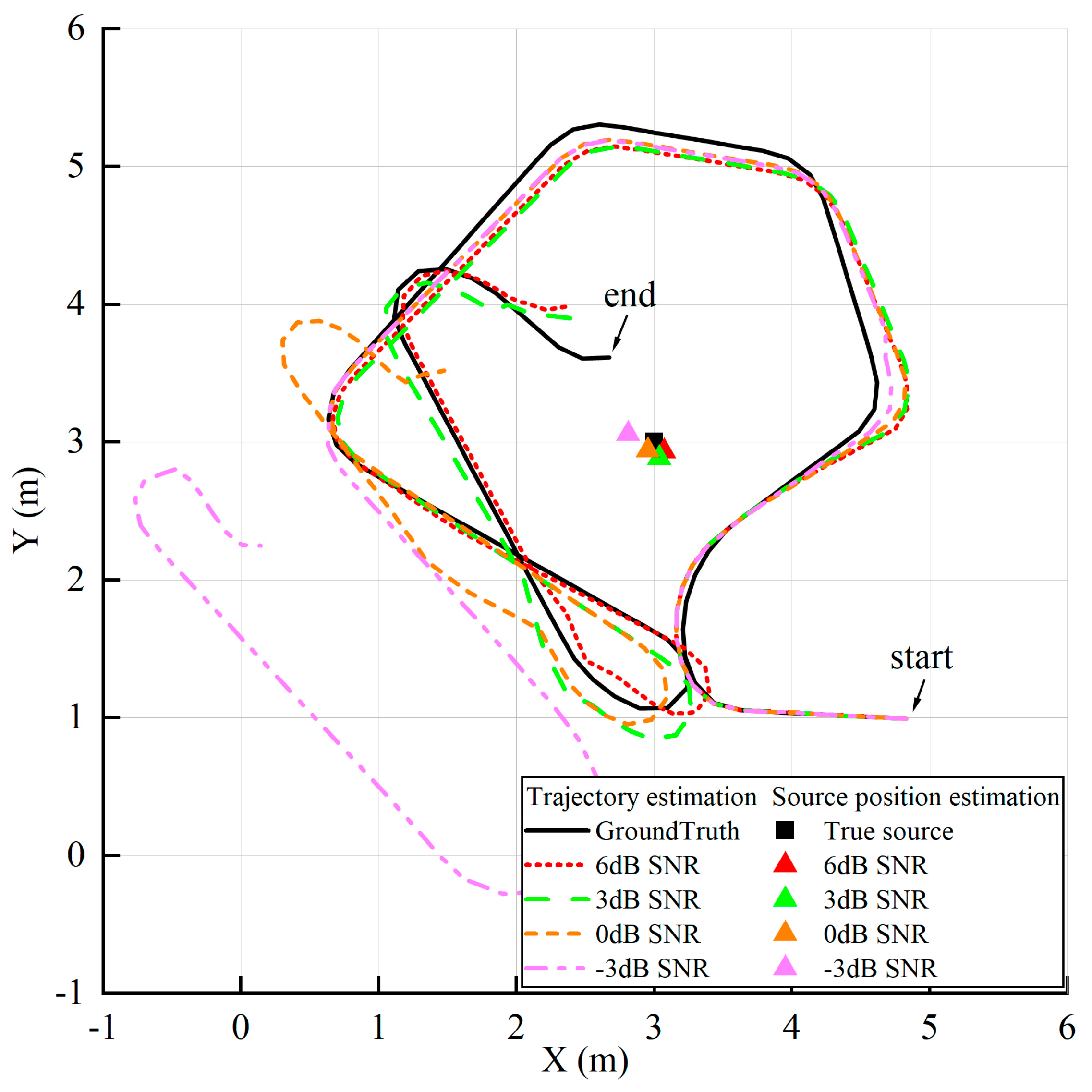
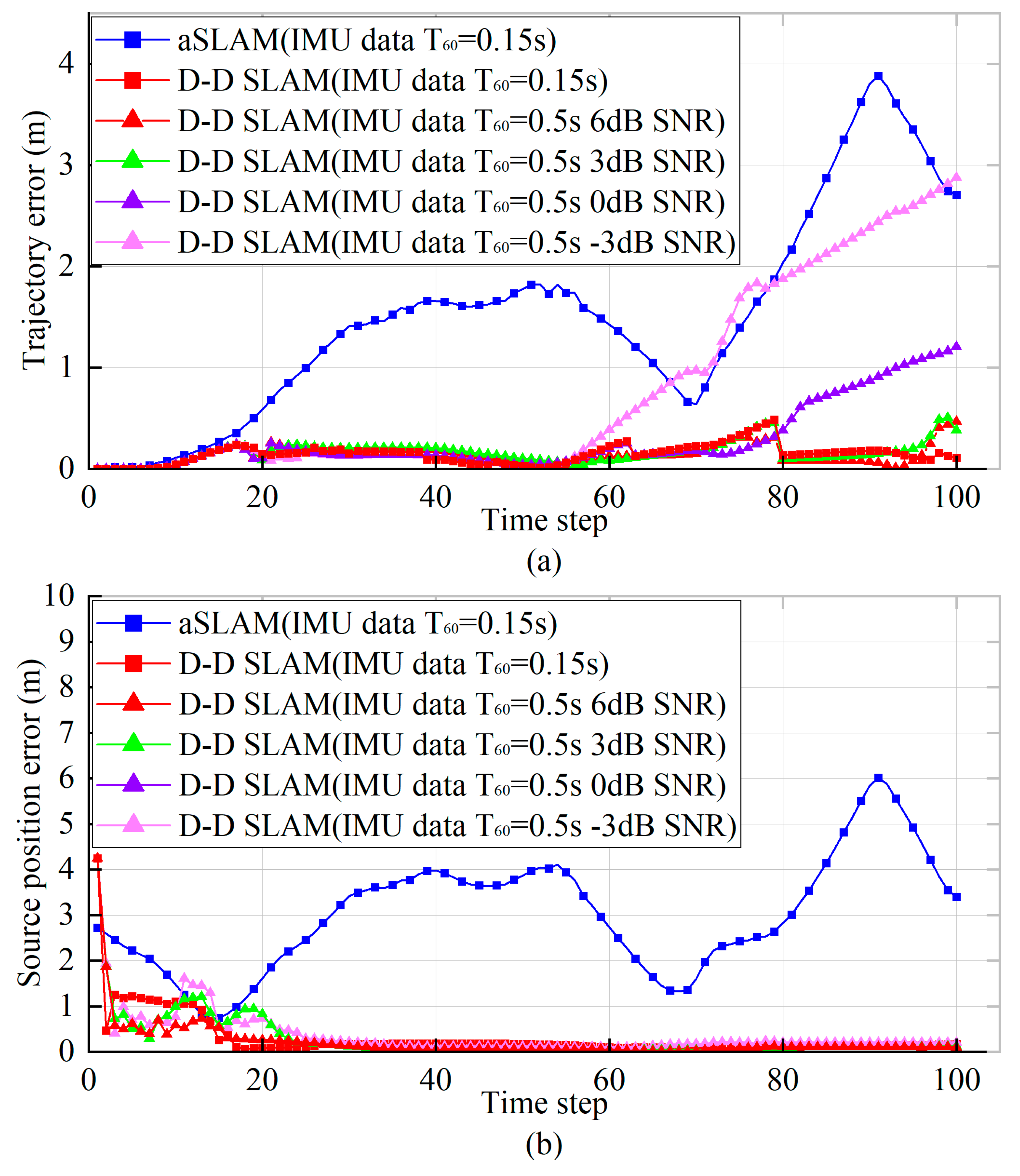
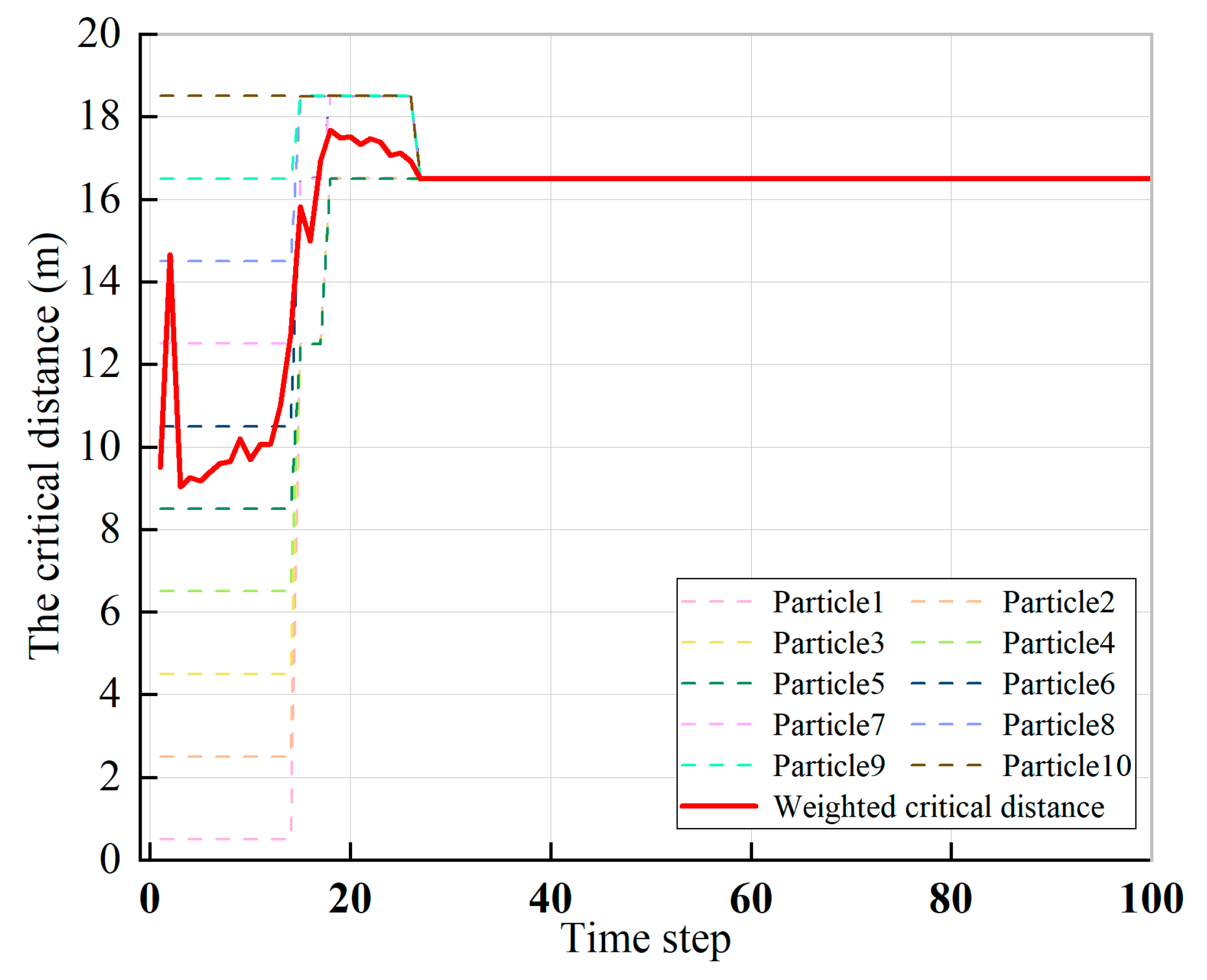
6.1. Simulation Results
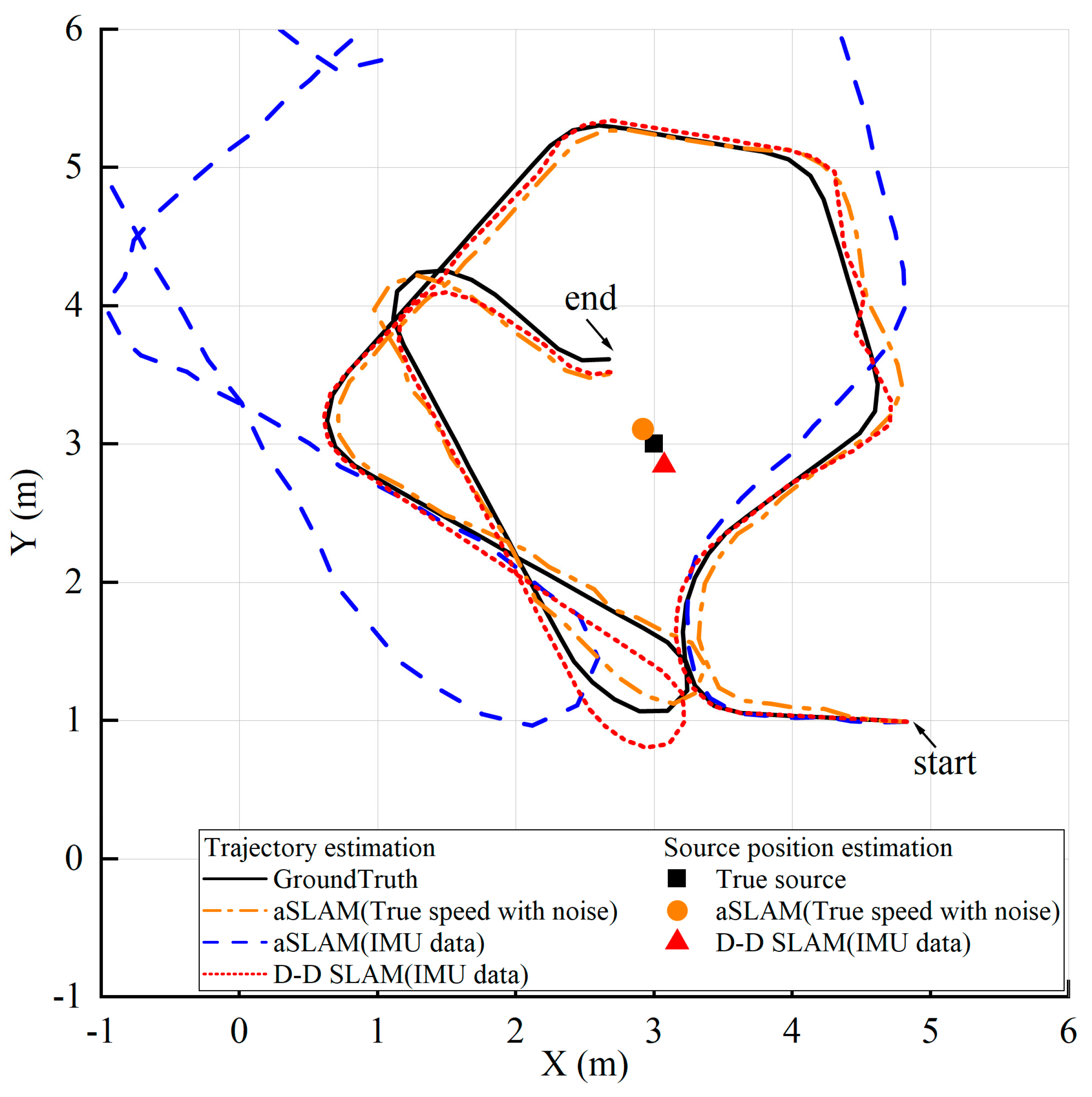
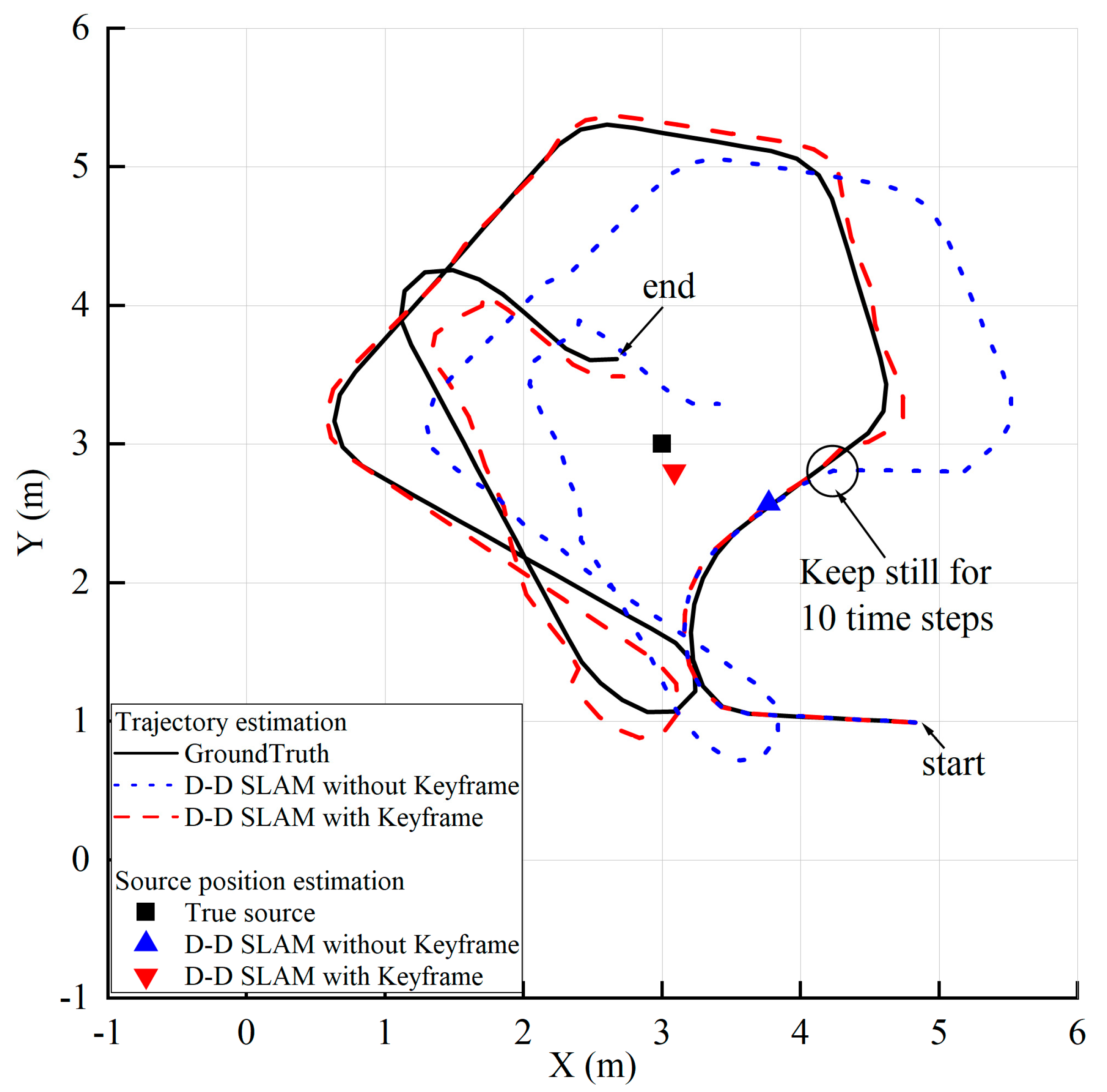
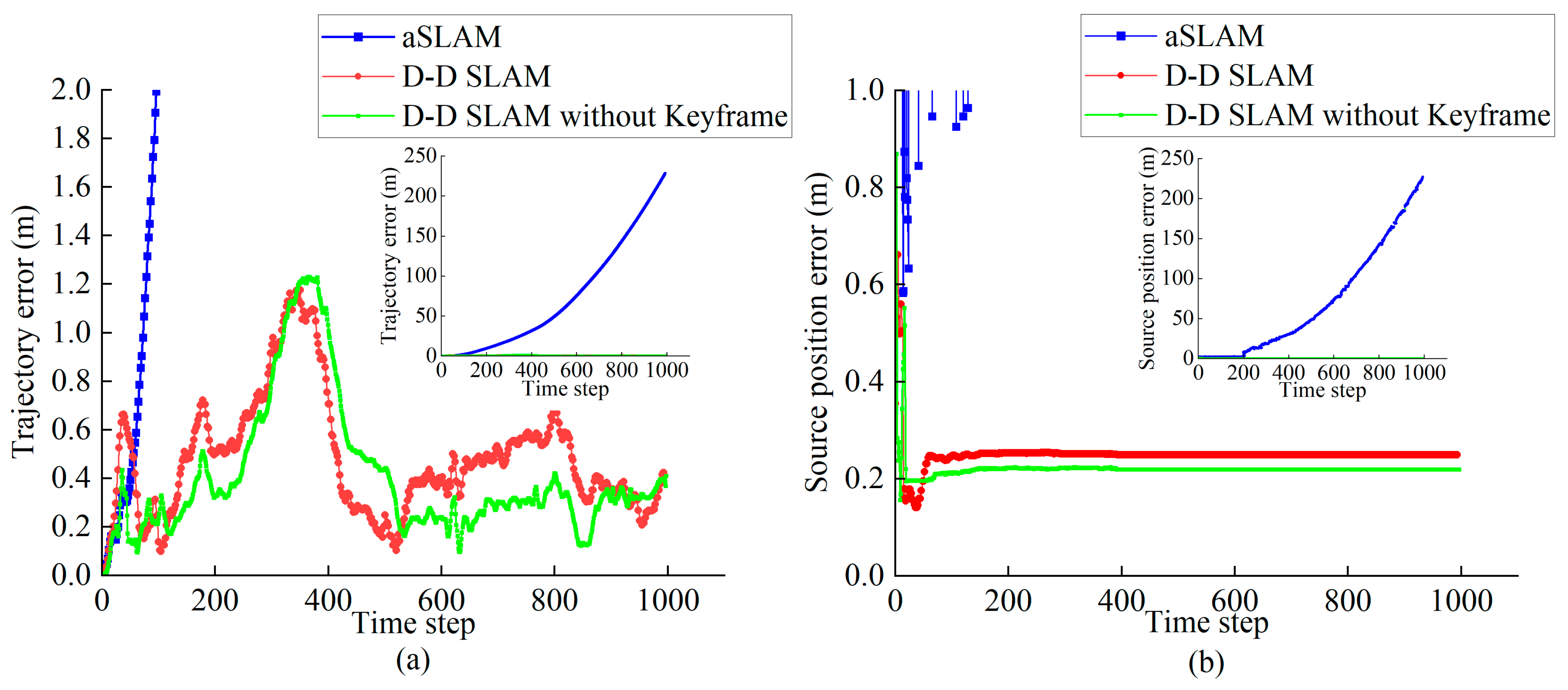
6.2. Experimental Results
6.3. Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Chen, L.; Yang, A.; Hu, H.; Naeem, W. RBPF-MSIS: Toward Rao-Blackwellized Particle Filter SLAM for Autonomous Underwater Vehicle With Slow Mechanical Scanning Imaging Sonar. IEEE Syst. J. 2020, 14, 3301–3312. [Google Scholar] [CrossRef]
- Shim, Y.; Park, J.; Kim, J. Relative navigation with passive underwater acoustic sensing. In Proceedings of the 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Goyang, Republic of Korea, 28–30 October 2015; pp. 214–217. [Google Scholar]
- Ribas, D.; Ridao, P.; Tardós, J.D.; Neira, J. Underwater SLAM in Man-Made Structured Environments. J. Field Robot. 2008, 25, 898–921. Available online: https://onlinelibrary.wiley.com/doi/abs/10.1002/rob.20249 (accessed on 3 July 2021). [CrossRef]
- Hu, J.S.; Chan, C.Y.; Wang, C.K.; Lee, M.T.; Kuo, C.Y. Simultaneous Localization of a Mobile Robot and Multiple Sound Sources Using a Microphone Array. Adv. Robot. 2011, 25, 135–152. [Google Scholar] [CrossRef]
- Kallakuri, N.; Even, J.; Morales, Y.; Ishi, C.; Hagita, N. Probabilistic Approach for Building Auditory Maps with a Mobile Microphone Array. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 2270–2275. [Google Scholar]
- Evers, C.; Naylor, P.A. Acoustic SLAM. IEEE/ACM Trans. Audio Speech Lang. Process. 2018, 26, 1484–1498. [Google Scholar] [CrossRef]
- Evers, C.; Naylor, P.A. Optimized Self-Localization for SLAM in Dynamic Scenes Using Probability Hypothesis Density Filters. IEEE Trans. Signal Process. 2018, 66, 863–878. [Google Scholar] [CrossRef]
- Joly, C.; Rives, P. Bearing-only sam using a minimal inverse depth parametrization—Application to Omnidirectional SLAM. In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, Funchal, Portugal, 15–18 June 2010; pp. 281–288. [Google Scholar] [CrossRef]
- Rascon, C.; Meza, I. Localization of sound sources in robotics: A review. Robot. Auton. Syst. 2017, 96, 184–210. [Google Scholar] [CrossRef]
- Sobhdel, A.; Shahrivari, S. Few-Shot Sound Source Distance Estimation Using Relation Networks. arXiv 2019, arXiv:2109.10561. [Google Scholar] [CrossRef]
- Yiwere, M.; Rhee, E.J. Sound Source Distance Estimation Using Deep Learning: An Image Classification Approach. Sensors 2019, 20, 172. [Google Scholar] [CrossRef]
- Portello, P.; Danès, P.; Argentieri, S. Acoustic models and Kalman filtering strategies for active binaural sound localization. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 137–142. [Google Scholar] [CrossRef]
- Zahorik, P. Direct-to-reverberant energy ratio sensitivity. J. Acoust. Soc. Am. 2002, 112, 2110–2117. [Google Scholar] [CrossRef]
- Strauss, M.; Mordel, P.; Miguet, V.; Deleforge, A. DREGON: Dataset and Methods for UAV-Embedded Sound Source Localization. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Zohourian, M.; Martin, R. Binaural Direct-to-Reverberant Energy Ratio and Speaker Distance Estimation. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 28, 92–104. [Google Scholar] [CrossRef]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation. Robotics Sci. Syst. 2015. [Google Scholar] [CrossRef]
- Le Gentil, C.; Vidal-Calleja, T.A.; Huang, S. Gaussian Process Preintegration for Inertial-Aided State Estimation. IEEE Robot. Autom. Lett. 2020, 5, 2108–2114. [Google Scholar] [CrossRef]
- Communication Acoustics; Springer: Berlin/Heidelberg, Germany. Available online: https://link.springer.com/book/10.1007/b139075 (accessed on 7 July 2021).
- Schwartz, O.; Plinge, A.; Habets, E.A.P.; Gannot, S. Blind microphone geometry calibration using one reverberant speech event. In Proceedings of the 2017 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 15–18 October 2017; pp. 131–135. [Google Scholar] [CrossRef]
- Khairuddin, R.; Talib, M.; Haron, H. Review on simultaneous localization and mapping (SLAM). In Proceedings of the 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–29 November 2015; pp. 85–90. [Google Scholar] [CrossRef]
- Vo, B.-N.; Ma, W.-K. The Gaussian Mixture Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.-N.; Clark, D. A Metric for Performance Evaluation of Multi-Target Tracking Algorithms. IEEE Trans. Signal Process. 2011, 59, 3452–3457. [Google Scholar] [CrossRef]
- Casella, G.; Robert, C.P. Rao-Blackwellisation of Sampling Schemes. Biometrika 1996, 83, 81–94. [Google Scholar] [CrossRef]
- Schon, T.; Gustafsson, F.; Nordlund, P.-J. Marginalized particle filters for mixed linear/nonlinear state-space models. IEEE Trans. Signal Process. 2005, 53, 2279–2289. [Google Scholar] [CrossRef]
- Jwo, D.-J.; Cho, T.-S. Critical remarks on the linearised and extended Kalman filters with geodetic navigation examples. Measurement 2010, 43, 1077–1089. [Google Scholar] [CrossRef]
- Salmond, D.J. Mixture Reduction Algorithms for Point and Extended Object Tracking in Clutter. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 667–686. [Google Scholar] [CrossRef]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Johansson, A.M. Diffuse Reverberation Model for Efficient Image-Source Simulation of Room Impulse Responses. IEEE Trans. Audio Speech Lang. Process. 2010, 18, 1429–1439. [Google Scholar] [CrossRef]
- Vincent, C.E.; Roomsimove, A. Matlab Toolbox for the Computation of Simulated Room Impulses Responses for Moving Sources. Available online: http://www.irisa.fr/metiss/members/evincent/software (accessed on 27 October 2020).
- DiBiase, J.H.; Silverman, H.; Brandstein, M.S. Robust localization in reverberant rooms. In Microphone Arrays: Signal Processing Techniques and Applications; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Liang, Y.; Feng, Y.; Quan, P.; Yan, L. Adaptive Particle Filter: Tuning Particle Number and Sampling Interval. In Proceedings of the 24th Chinese Control Conference, Guangzhou, China, 15 June–18 July 2005; Volumes 1 and 2, pp. 803–807. [Google Scholar]
- Kuptametee, C.; Aunsri, N. A review of resampling techniques in particle filtering framework. Measurement 2022, 193, 110836. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, W.; Wang, G.; Zhang, W. Acoustic SLAM Based on the Direction-of-Arrival and the Direct-to-Reverberant Energy Ratio. Drones 2023, 7, 120. https://doi.org/10.3390/drones7020120
Qiu W, Wang G, Zhang W. Acoustic SLAM Based on the Direction-of-Arrival and the Direct-to-Reverberant Energy Ratio. Drones. 2023; 7(2):120. https://doi.org/10.3390/drones7020120
Chicago/Turabian StyleQiu, Wenhao, Gang Wang, and Wenjing Zhang. 2023. "Acoustic SLAM Based on the Direction-of-Arrival and the Direct-to-Reverberant Energy Ratio" Drones 7, no. 2: 120. https://doi.org/10.3390/drones7020120
APA StyleQiu, W., Wang, G., & Zhang, W. (2023). Acoustic SLAM Based on the Direction-of-Arrival and the Direct-to-Reverberant Energy Ratio. Drones, 7(2), 120. https://doi.org/10.3390/drones7020120