
Medium-Scale UAVs: A Practical Control System Considering Aerodynamics Analysis

 ,
,  , ,
, ,  ,
,  ,
,
Abstract
:1. Introduction
2. Medium-Scale Multicopters
2.1. Fan Hopper, a Novel Design for Medium-Scale Hexacopters
2.2. Aerodynamics Considerations
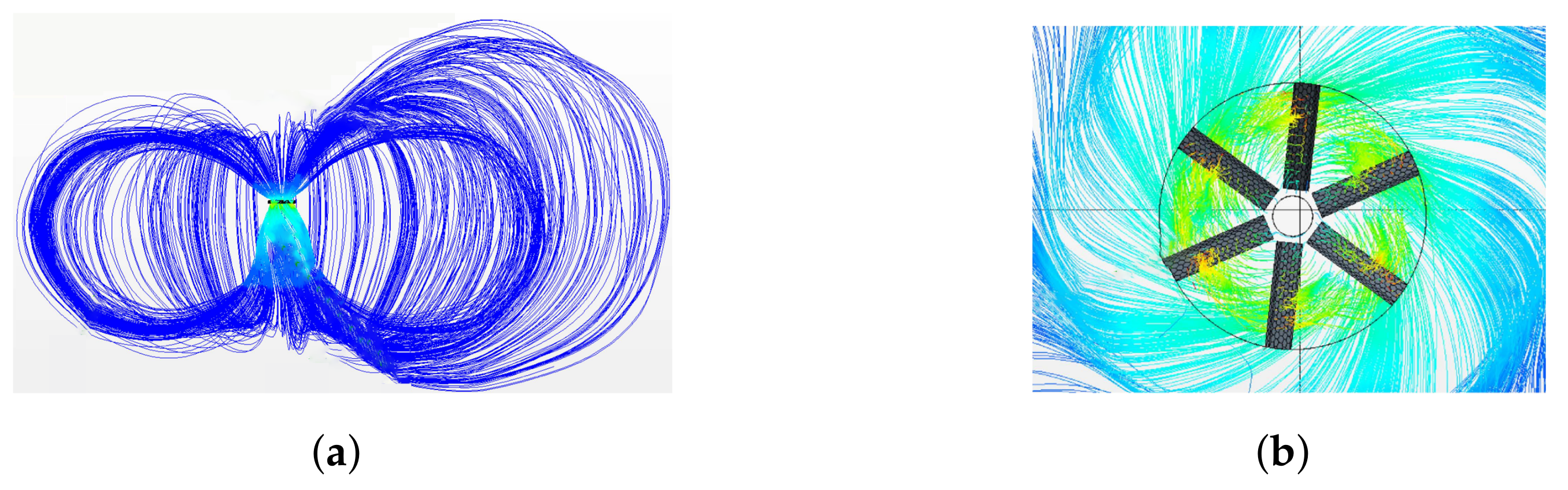
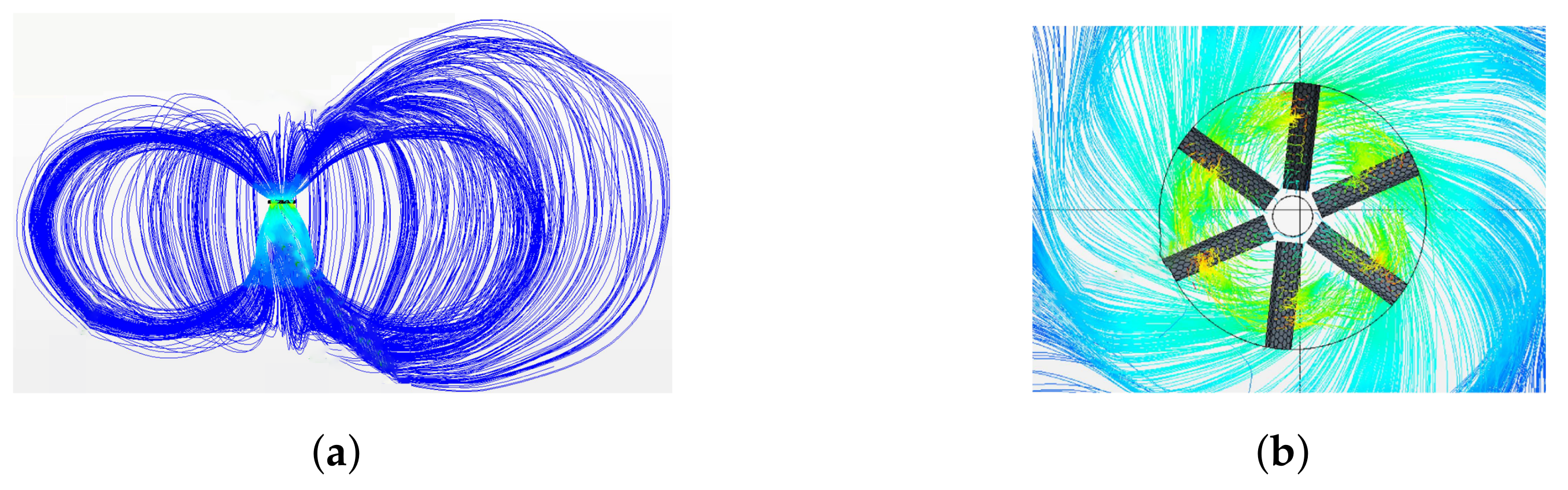
- Firstly, a single rotor with a 1 m diameter, 5 m/s inlet air velocity, and 300 rad/s rotor tangential velocity was considered. Obviously, due to the self-feeding toroidal vortex, asymmetry of the streamline aft and forward of the duct (triggered by the velocity of the rotor), high pressure down the rotor, disperse the droplets, as shown in Figure 3a, and the backflow area of the efficiency faced reduction; meanwhile, a huge stream rotation was observed, as shown in Figure 3b.Figure 3. Analysis of a single propeller; (a) asymmetry streamlines around the rotor; (b) the stream rotation.Figure 3. Analysis of a single propeller; (a) asymmetry streamlines around the rotor; (b) the stream rotation.
![Drones 06 00244 g003]()
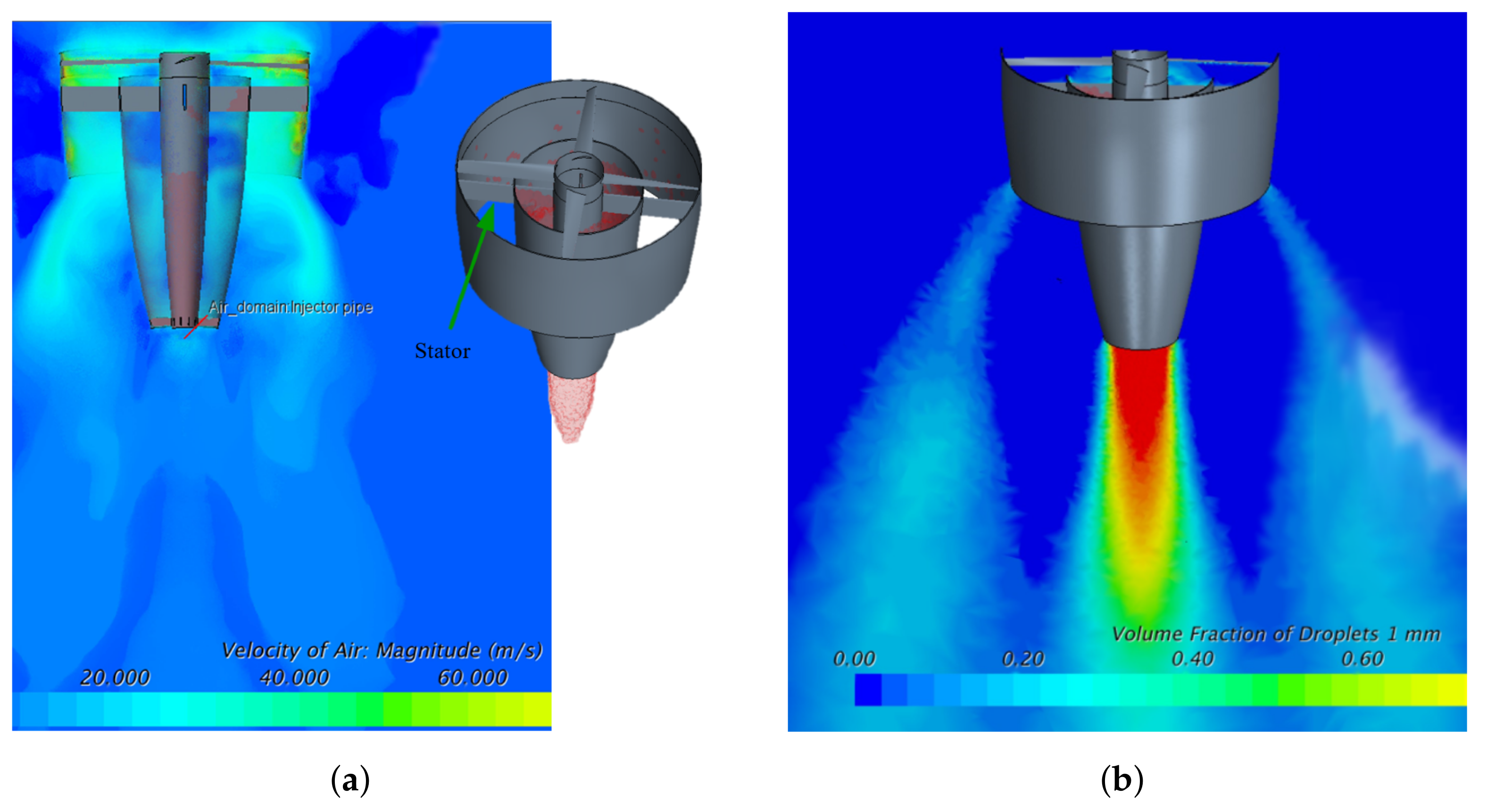
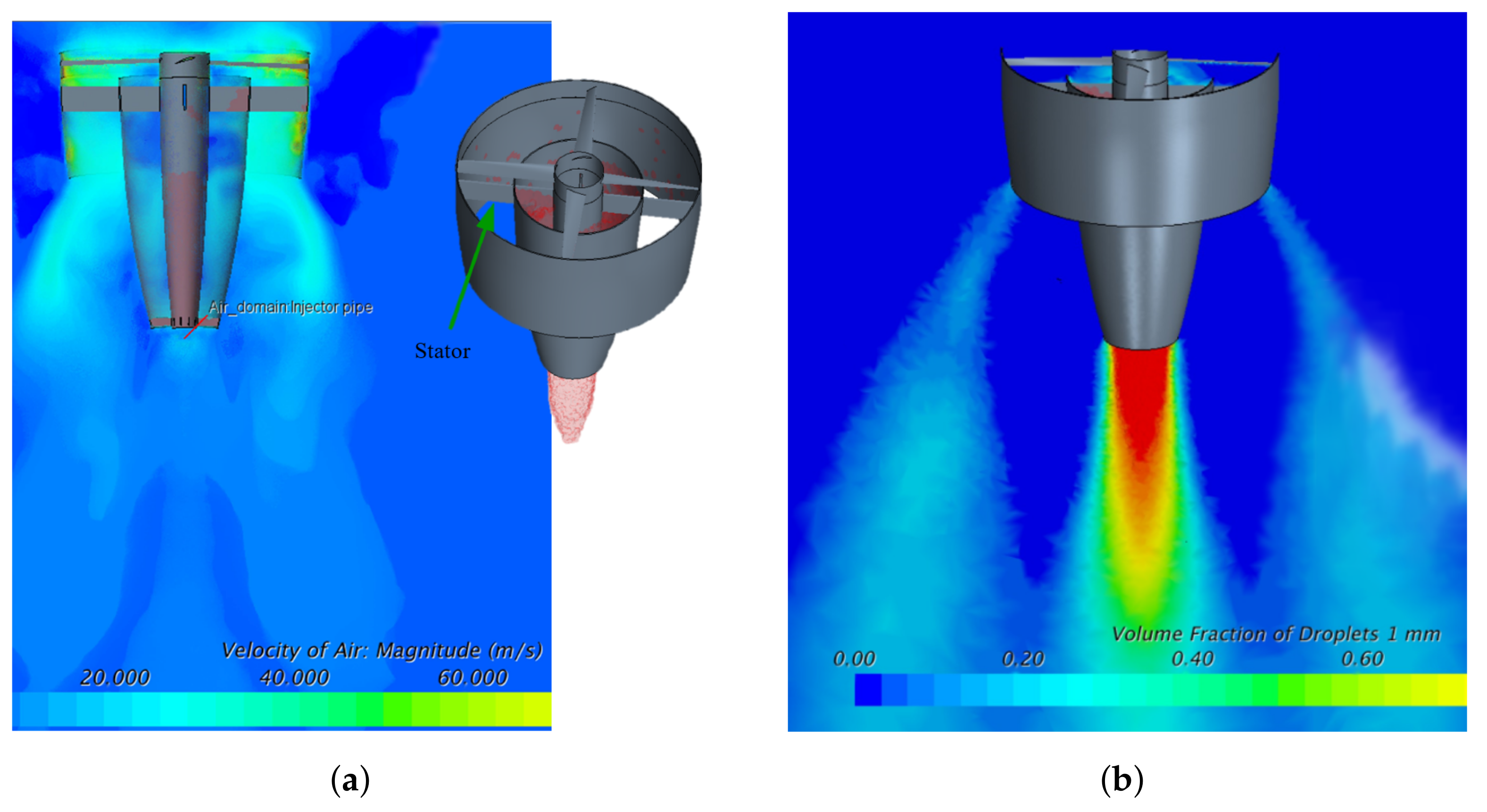
- Secondly, the stator was added to eliminate the stream rotation, as shown in Figure 4a; this added a shrouded design which led the stream downwards and avoided vortex formation much better, as well as the backflow area; however, convergence of the stream was still complicated. As shown in Figure 4b, the droplet distribution was unrealistic due to lack of an actual injector. Additionally, the multiphase observed was adequate but complicated to match the transient approach.
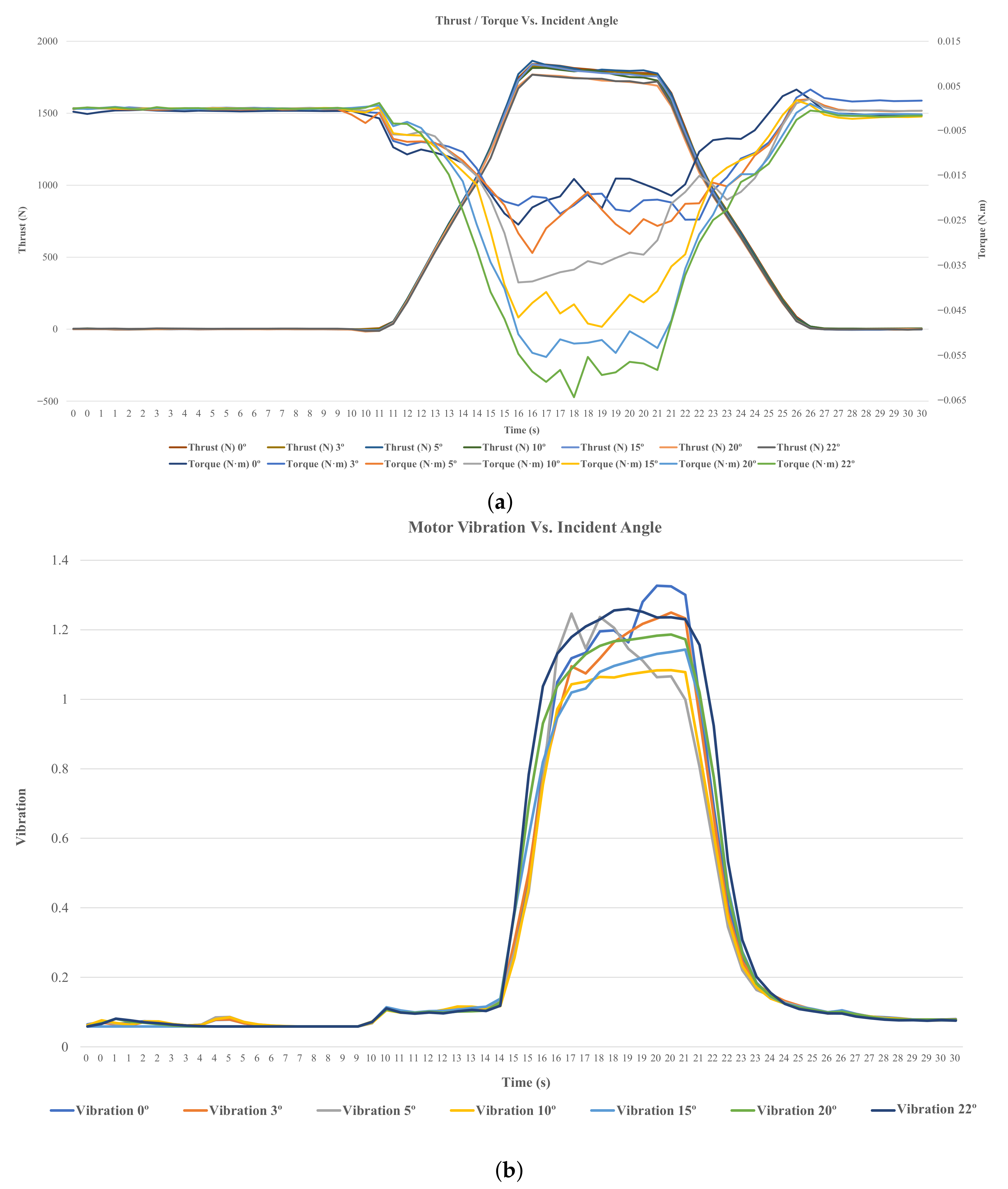
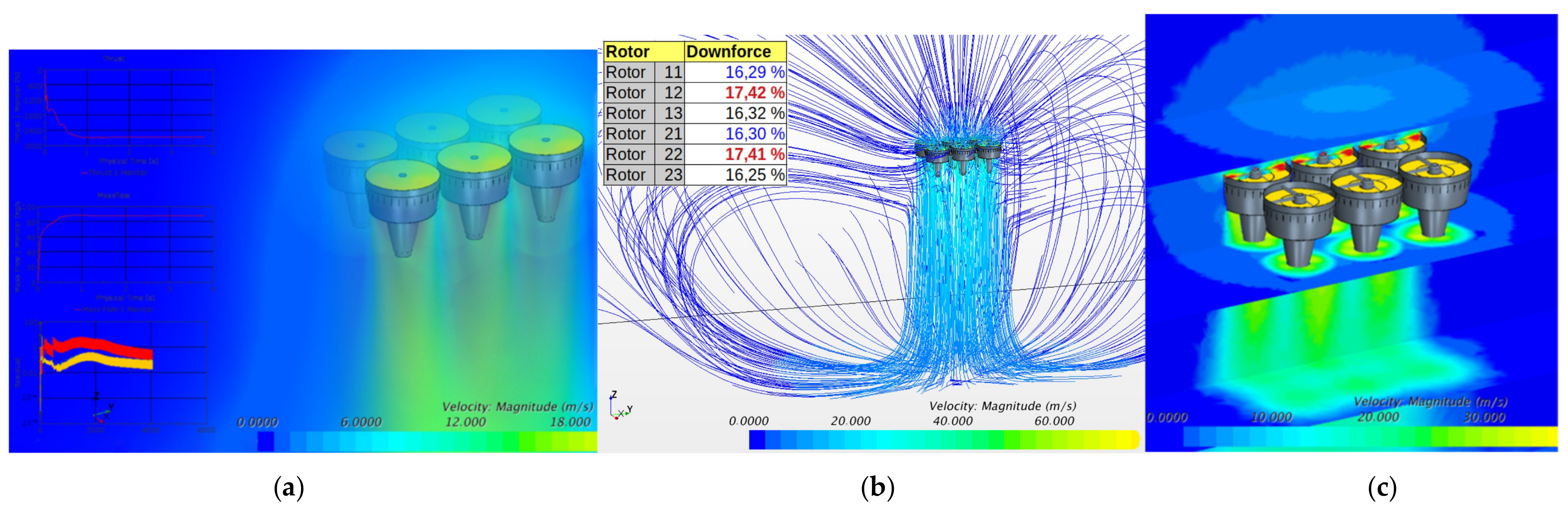
- Thirdly, multiple ducts are concatenated to compensate for the instabilities in the transient mode and investigate the interaction between the ducts and the ground effects. Additionally, the propeller design was improved to give a realistic downstream, as shown in Figure 5a. Moreover, considering the airspeed as m/s, the blade tangential tip speed as rad/s, and the propeller diameter as m, Equation (1) could be solved as follows:where TSR represents the tip speed ratio that equals 2.5, which is sufficient for a propeller of 5–6 blades. In addition, the total thrust diagram of different rotors was evaluated, which went up to 2700 N at the steady-state level; also, the medium mass flow reached 90 kg/s. Meanwhile, the absence of a multiphase model gave a better convergence, the downwash was realistic without the presence of backflow, and droplet ground impingement was corrected, as shown in Figure 5c. Furthermore, according to the table in Figure 5b, rotor 12 and rotor 22 had higher downforce than others, which overall stated the improved configuration of multiple rotors rather than a single one. The different rotor behaviors suggest a distinct injector strategy that even influences the UAV control.Figure 4. Analysis of a single propeller; (a) the rotor and shroud; (b) unrealistic droplet distribution due to no real injector.Figure 4. Analysis of a single propeller; (a) the rotor and shroud; (b) unrealistic droplet distribution due to no real injector.
![Drones 06 00244 g004]() Figure 5. Analysisof 6 propeller engines; (a) (upper-left part) rotor thrust; (right part) mass flow of the stream passing through the engines; (b) streamlines around the model; (c) absence of multiphase model gave better convergence.Figure 5. Analysisof 6 propeller engines; (a) (upper-left part) rotor thrust; (right part) mass flow of the stream passing through the engines; (b) streamlines around the model; (c) absence of multiphase model gave better convergence.
Figure 5. Analysisof 6 propeller engines; (a) (upper-left part) rotor thrust; (right part) mass flow of the stream passing through the engines; (b) streamlines around the model; (c) absence of multiphase model gave better convergence.Figure 5. Analysisof 6 propeller engines; (a) (upper-left part) rotor thrust; (right part) mass flow of the stream passing through the engines; (b) streamlines around the model; (c) absence of multiphase model gave better convergence.![Drones 06 00244 g005]()
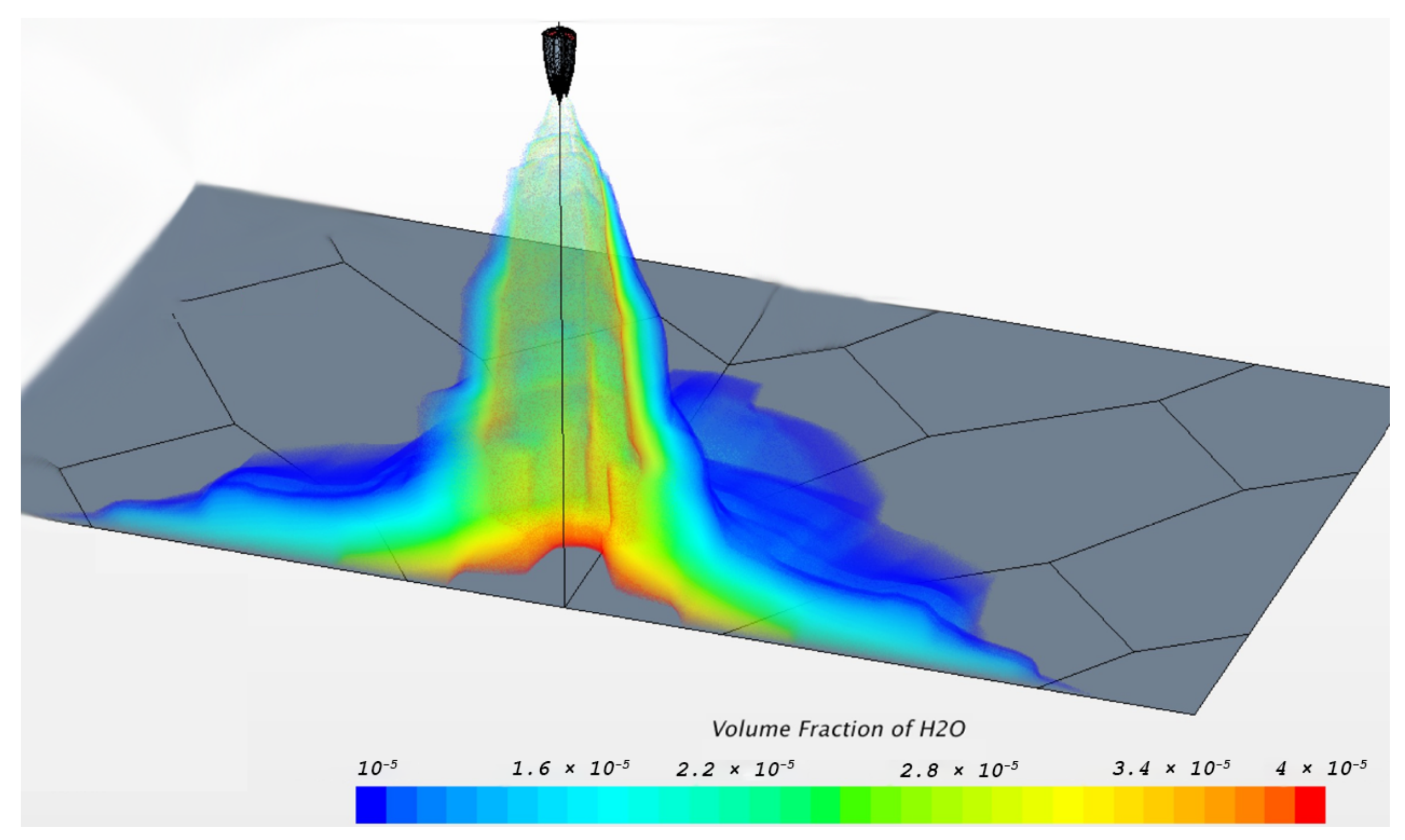
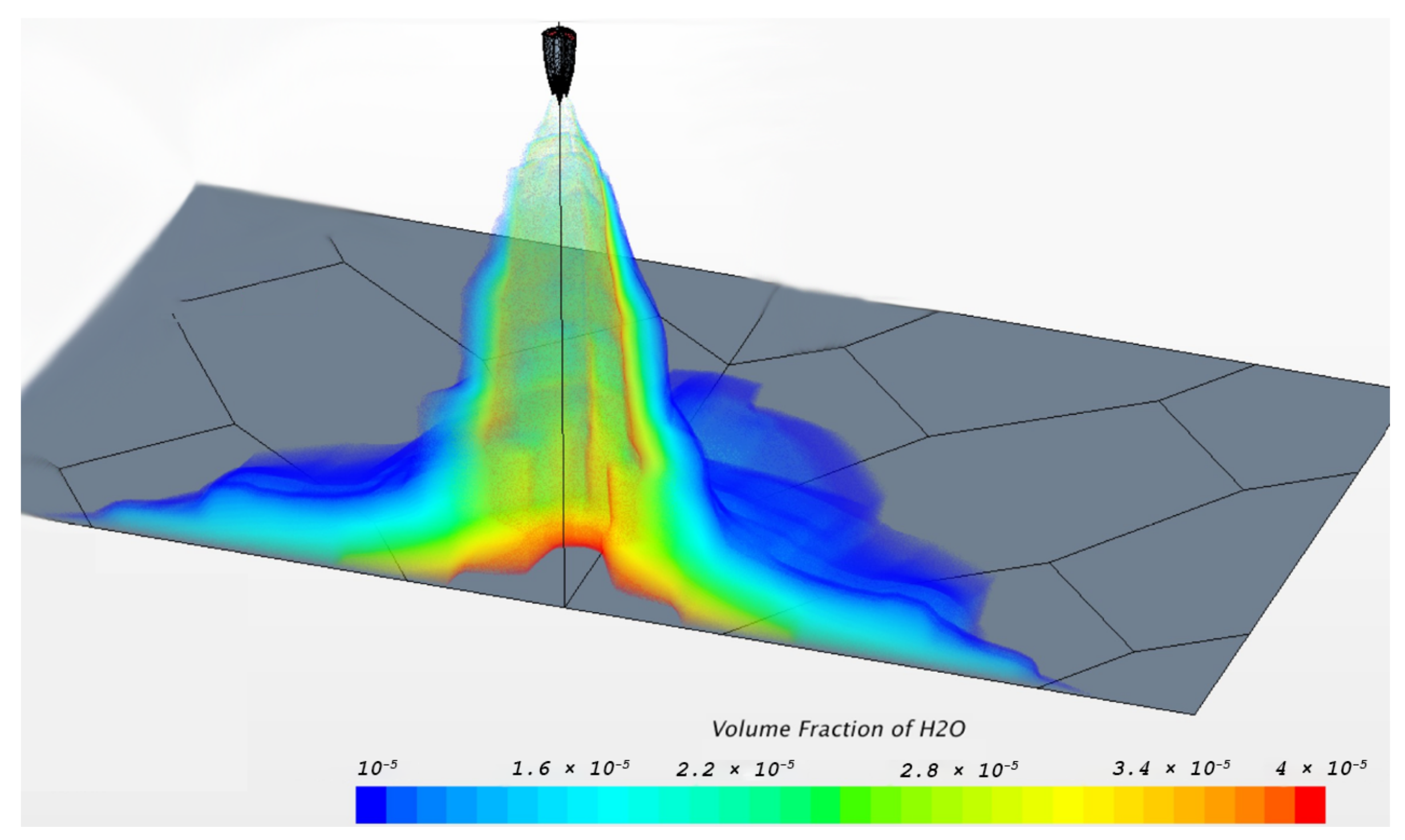
- Finally, regarding the volume fraction of vapors () exhausted from the tube, as shown in Figure 6, numerous iterations were carried out, multiple injector models were developed, excellent results were obtained due to several multiphase calculations, different droplet sizes were evaluated, and the ground impregnation was improved.
3. Hexacopter Time-Varying Dynamics
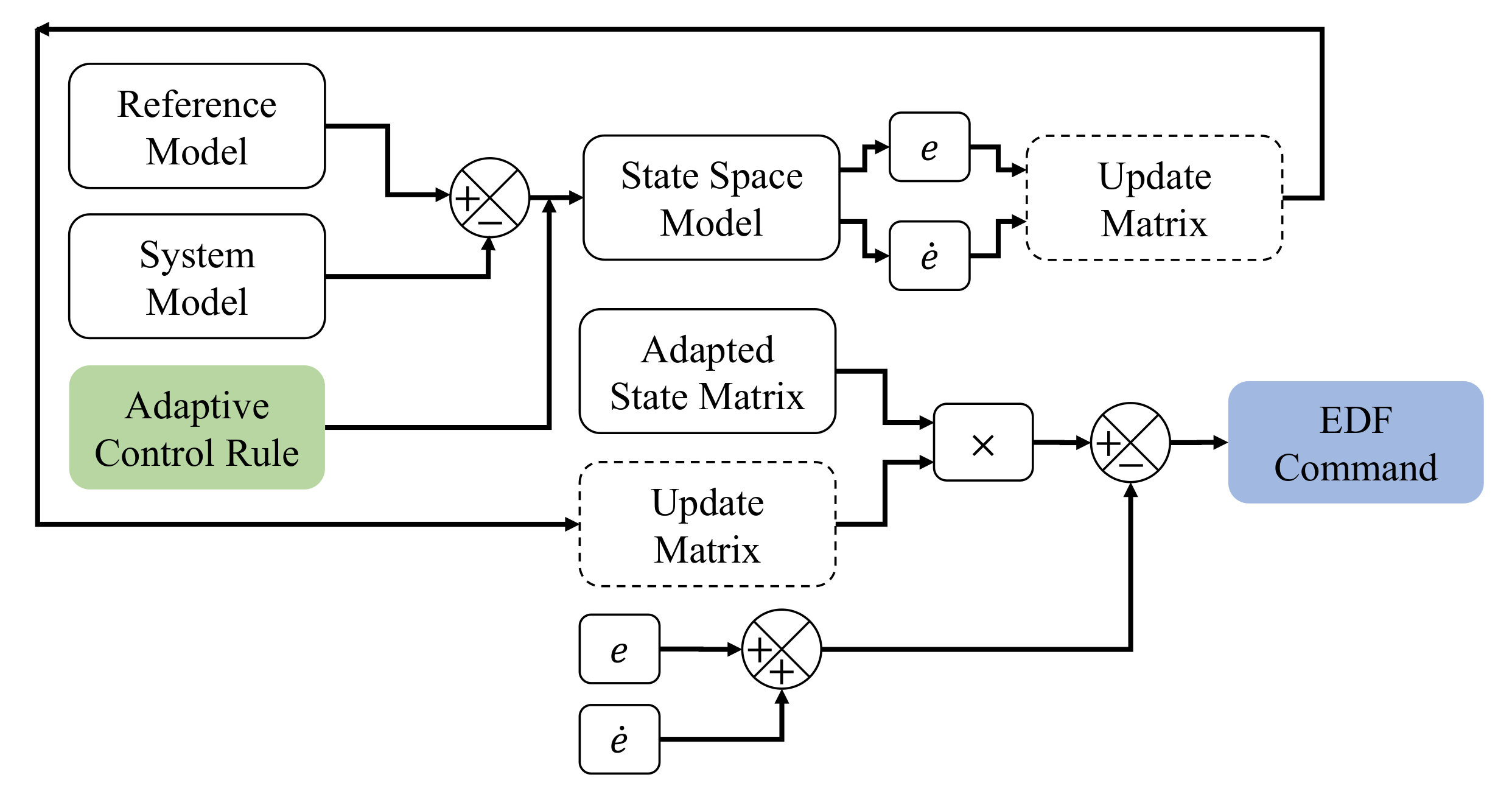
4. The Proposed Control Strategy
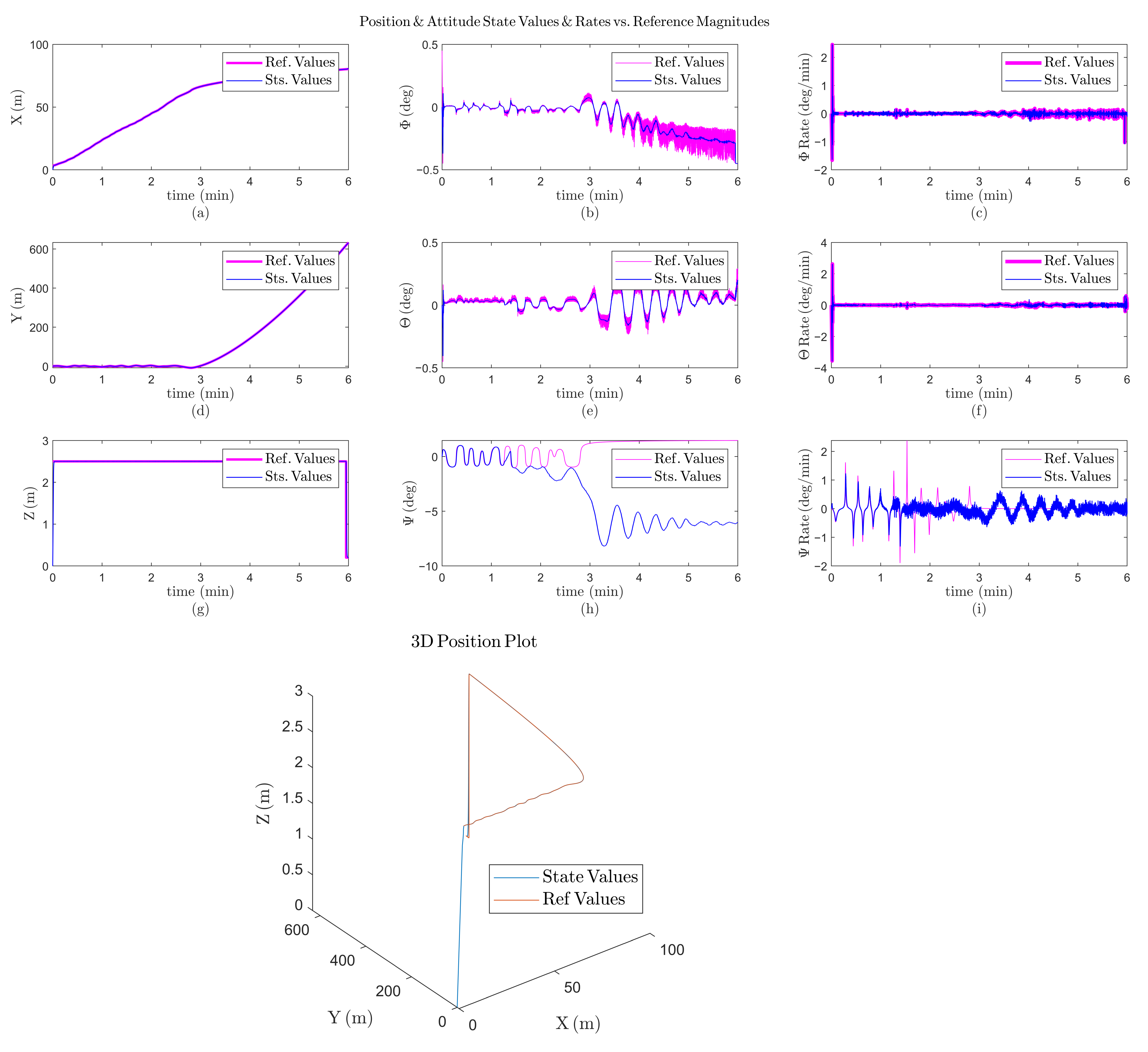
5. Simulation Results
| Algorithm 1 FanHopper URDF Configuration. |
| Require: geometric params. |
| Ensure: the mathematical model |
| ▹ six propellers |
| ▹ IMU, forces, moments, and camera controllers |
6. Hardware Design
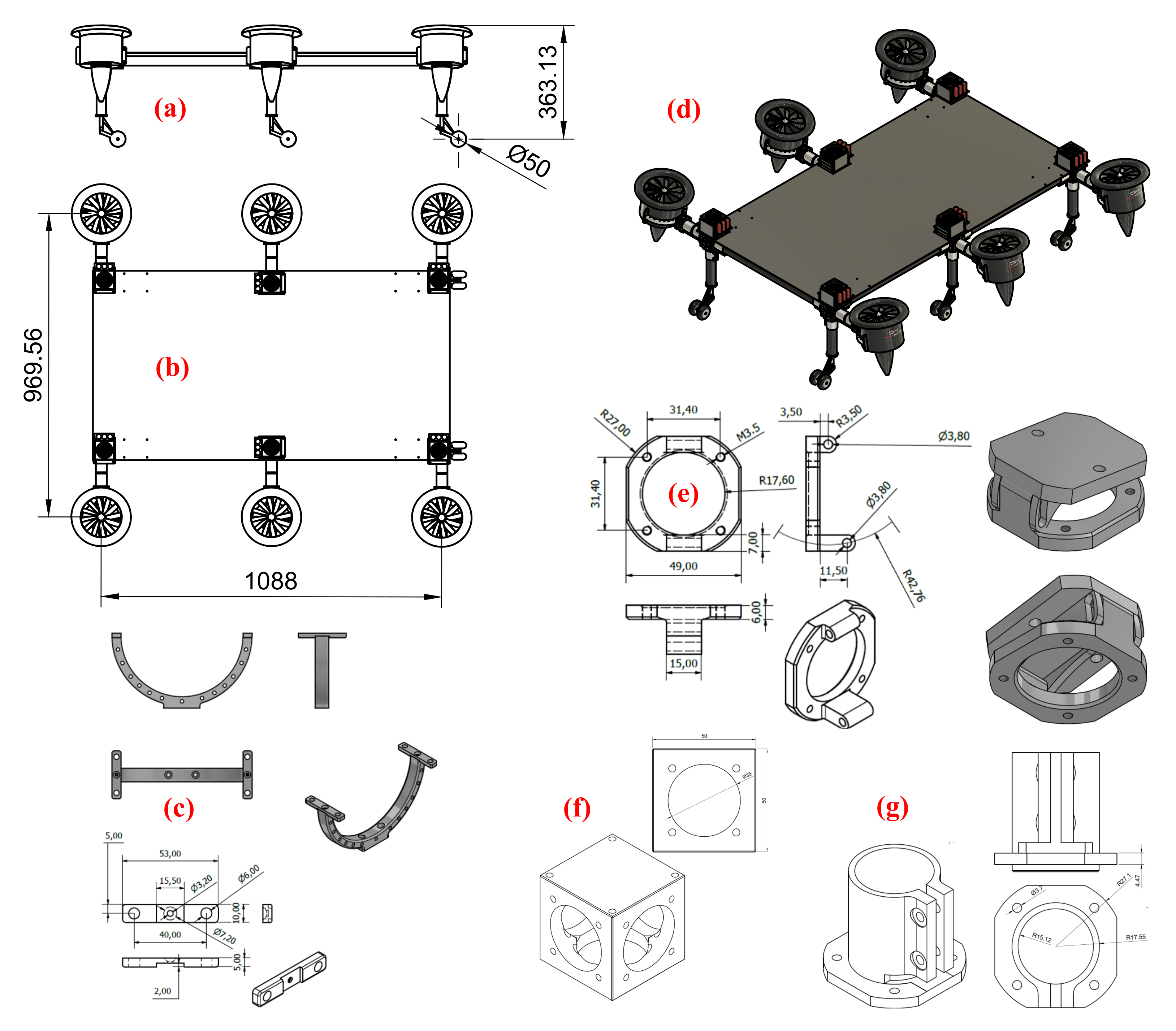
6.1. Model Design and Assembly
6.2. System Integration
7. Practical Results
8. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AoA | Angle of attack. |
| ANCF | Absolute nodal coordinate formulation. |
| AP | Autopilot. |
| CoG | Center of gravity. |
| CoM | Center of mass. |
| ECEF | Earth centered Earth fixed frame. |
| EDF | Electric ducted fan. |
| EKF | Extended Kalman filter. |
| ESC | Electrical speed controller. |
| FAFSMC | Fuzzy adaptive fixed-time sliding mode controller. |
| FE | Final element. |
| MRAC | Model reference adaptive controller. |
| NED | North east down. |
| SPR | Strictly positive real. |
| TSR | Tip speed ratio. |
| VTOL | Vertical takeoff and landing. |
References
- Fahlstrom, P.G.; Gleason, T.J.; Sadraey, M.H. Introduction to UAV Systems; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Crouch, C.C. Integration of Mini-UAVs at the Tactical Operations Level: Implications of Operations, Implementation, and Information Sharing; Technical Report; Naval Postgraduate School: Monterey, CA, USA, 2005. [Google Scholar]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- DeSmidt, H. Conceptual Design: Optimization of Medium Scale Unmanned Aerial Vehicle Propulsion System; Technical Report; University of Tennessee: Knoxville, TN, USA, 2020. [Google Scholar]
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819. [Google Scholar] [CrossRef]
- Achtelik, M.; Doth, K.M.; Gurdan, D.; Stumpf, J. Design of a multi rotor MAV with regard to efficiency, dynamics and redundancy. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4779. [Google Scholar]
- Vu, N.A.; Dang, D.K.; Le Dinh, T. Electric propulsion system sizing methodology for an agriculture multicopter. Aerosp. Sci. Technol. 2019, 90, 314–326. [Google Scholar] [CrossRef]
- Luna, M.A.; Ale Isaac, M.S.; Ragab, A.R.; Campoy, P.; Flores Peña, P.; Molina, M. Fast Multi-UAV Path Planning for Optimal Area Coverage in Aerial Sensing Applications. Sensors 2022, 22, 2297. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Yonezawa, K.; Liu, H. Effect of Ducted Multi-Propeller Configuration on Aerodynamic Performance in Quadrotor Drone. Drones 2021, 5, 101. [Google Scholar] [CrossRef]
- Miwa, M.; Uemura, S.; Ishihara, Y.; Imamura, A.; Shim, J.h.; Ioi, K. Evaluation of quad ducted-fan helicopter. Int. J. Intell. Unmanned Syst. 2013, 2, 187–198. [Google Scholar] [CrossRef]
- Moaad, Y.; Alaaeddine, J.; Jawad, K.; Tarik, B.; Lekman, B.; Hamza, J.; Patrick, H. Design and optimization of a ducted fan VTOL MAV controlled by Electric Ducted Fans. In Proceedings of the 8th European Conference for Aeronautics and Space Sciences, Madrid, Spain, 1–4 July 2019; pp. 1–4. [Google Scholar]
- Chen, C.; Dong, T.; Fu, W.; Liu, N. On dynamic characteristics and stability analysis of the ducted fan unmanned aerial vehicles. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419867018. [Google Scholar] [CrossRef]
- Jin, Y.; Qian, Y.; Zhang, Y.; Zhuge, W. Modeling of ducted-fan and motor in an electric aircraft and a preliminary integrated design. SAE Int. J. Aerosp. 2018, 11, 115–126. [Google Scholar] [CrossRef]
- Ohanian, O.J. Ducted Fan Aerodynamics and Modeling, with Applications of Steady and Synthetic Jet Flow Control. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2011. [Google Scholar]
- Longbottom, J. Investigation into the Reduction of the Drag Area of a Paramotor. Bachelor’s Thesis, University of New South Wales, Sydney, Australia, 2006. [Google Scholar]
- Zuo, X.; Liu, J.W.; Wang, X.; Liang, H.Q. Adaptive PID and model reference adaptive control switch controller for nonlinear hydraulic actuator. Math. Probl. Eng. 2017, 2017, 6970146. [Google Scholar] [CrossRef]
- Gai, H.; Li, X.; Jiao, F.; Cheng, X.; Yang, X.; Zheng, G. Application of a New Model Reference Adaptive Control Based on PID Control in CNC Machine Tools. Machines 2021, 9, 274. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Xuan Mung, N.; Ha, L.N.N.T.; Hong, S.K. Fault-Tolerant Control for Hexacopter UAV Using Adaptive Algorithm with Severe Faults. Aerospace 2022, 9, 304. [Google Scholar] [CrossRef]
- Rosales, C.; Soria, C.M.; Rossomando, F.G. Identification and adaptive PID Control of a hexacopter UAV based on neural networks. Int. J. Adapt. Control Signal Process. 2019, 33, 74–91. [Google Scholar] [CrossRef]
- Abadi, A.S.S.; Hosseinabadi, P.A.; Mekhilef, S. Fuzzy adaptive fixed-time sliding mode control with state observer for a class of high-order mismatched uncertain systems. Int. J. Control. Autom. Syst. 2020, 18, 2492–2508. [Google Scholar] [CrossRef]
- Bartsch, R.; Coyne, J.; Gray, K. Drones in Society: Exploring the Strange New World of Unmanned Aircraft; Routledge: Oxfordshire, UK, 2016. [Google Scholar]
- Ranasinghe, K.; Bijjahalli, S.; Gardi, A.; Sabatini, R. Intelligent Health and Mission Management for Multicopter UAS Integrity Assurance. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–9. [Google Scholar]
- Ragab, A.R.; Isaac, M.S.A.; Luna, M.A.; Flores Peña, P. WILD HOPPER Prototype for Forest Firefighting. Int. J. Online Biomed. Eng. 2021, 17, 148–168. [Google Scholar] [CrossRef]
- Bresciani, T. Modelling, Identification and Control of a Quadrotor Helicopter. Master’s Thesis, Lund University, Lund, Sweden, 2008. [Google Scholar]
- Isaac, M.S.A.; Ragab, A.R.; Garcés, E.C.; Luna, M.A.; Peña, P.F.; Cervera, P.C. Mathematical Modeling and Designing a Heavy Hybrid-Electric Quadcopter, Controlled by Flaps. In Proceedings of the International Conference of Autonomous Systems (IEEE ICAS), Montreal, QC, Canada, 11–13 August 2021. [Google Scholar]
- Ahmed, S.; Xin, H.; Faheem, M.; Qiu, B. Stability Analysis of a Sprayer UAV with a Liquid Tank with Different Outer Shapes and Inner Structures. Agriculture 2022, 12, 379. [Google Scholar] [CrossRef]
- Wang, H.; Dong, X.; Xue, J.; Liu, J.; Wang, J. Modeling and simulation of a time-varying inertia aircraft in aerial refueling. Chin. J. Aeronaut. 2016, 29, 335–345. [Google Scholar] [CrossRef]
- Spencer, A.J.M. Continuum Mechanics; Courier Corporation: Chelmsford, MA, USA, 2004. [Google Scholar]
- Shabana, A.A. Computational Continuum Mechanics; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Andrievsky, B.R.; Churilov, A.N.; Fradkov, A.L. Feedback Kalman-Yakubovich lemma and its applications to adaptive control. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; Volume 4, pp. 4537–4542. [Google Scholar]
- Dydek, Z.T.; Annaswamy, A.M.; Lavretsky, E. Adaptive control of quadrotor UAVs: A design trade study with flight evaluations. IEEE Trans. Control Syst. Technol. 2012, 21, 1400–1406. [Google Scholar] [CrossRef]
- Murray, R.M.; Li, Z.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Weight (kg) |
|---|---|---|
| AP | Pixhawk Standard Set Cube Orange + ADS-B | 0.32 |
| EDF | SCHUBELER, DS-98-DIA HST | 1330 × 6 |
| GCS | modified QGroundControl, using Qt15.5.2 | - |
| ESC & Fan | 0.52 × 6 | |
| Battery | Quantum 5000 mAh | 2.215 × 6 |
| Base link | Wood and flexible materials | 5 |
| Cabling | - | 1 |
| Fluid tank | Containing the spray system and the regulator | 3 |
| TOTAL empty weight | 35 |
| EDF | Roll Moment | Pitch Moment | Yaw Moment | Configuration |
|---|---|---|---|---|
| R1 | 0.5 | −1 | 0.5 | |
| R2 | 0.5 | 0 | 0 | 1 ⥀ ⸺ ⥁ 6 |
| R3 | 0.5 | 1 | −0.5 | 2 ⥁ ⸺ ⥀ 5 |
| R4 | −0.5 | 1 | 0.5 | 3 ⥀ ⸺ ⥁ 4 |
| R5 | −0.5 | 0 | 0 | |
| R6 | −0.5 | −1 | −0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ale Isaac, M.S.; Luna, M.A.; Ragab, A.R.; Ale Eshagh Khoeini, M.M.; Kalra, R.; Campoy, P.; Flores Peña, P.; Molina, M. Medium-Scale UAVs: A Practical Control System Considering Aerodynamics Analysis. Drones 2022, 6, 244. https://doi.org/10.3390/drones6090244
Ale Isaac MS, Luna MA, Ragab AR, Ale Eshagh Khoeini MM, Kalra R, Campoy P, Flores Peña P, Molina M. Medium-Scale UAVs: A Practical Control System Considering Aerodynamics Analysis. Drones. 2022; 6(9):244. https://doi.org/10.3390/drones6090244
Chicago/Turabian StyleAle Isaac, Mohammad Sadeq, Marco Andrés Luna, Ahmed Refaat Ragab, Mohammad Mehdi Ale Eshagh Khoeini, Rupal Kalra, Pascual Campoy, Pablo Flores Peña, and Martin Molina. 2022. "Medium-Scale UAVs: A Practical Control System Considering Aerodynamics Analysis" Drones 6, no. 9: 244. https://doi.org/10.3390/drones6090244
APA StyleAle Isaac, M. S., Luna, M. A., Ragab, A. R., Ale Eshagh Khoeini, M. M., Kalra, R., Campoy, P., Flores Peña, P., & Molina, M. (2022). Medium-Scale UAVs: A Practical Control System Considering Aerodynamics Analysis. Drones, 6(9), 244. https://doi.org/10.3390/drones6090244