1. Introduction
According to the Federal Aviation Administration, as of 13 April 2021, there were 368,508 commercial and 500,601 recreational Unmanned Aircraft Systems (UAS) or drones registered in the US [
1]. The drone industry is expanding rapidly. They are growing increasingly more accessible to the public and at cheaper prices [
2]. According to their payload capability, drones can be used for various purposes, such as inspection, delivery, monitoring, photography, and among other uses [
3]. However, drones can also be misused, generating safety concerns [
3]. There is an increasing potential for small drones to be misused, especially by hobbyists, as well as for illegal activities such as drug smuggling, terrorist attacks, or even interfering in emergency services such as fire prevention and disaster response. Drones can also be converted into dangerous weapons by loading them with explosive materials [
2]. Examples of drones being used in terrorist attacks can be found in [
4,
5].
It is important that the illegal use of drones be controlled in order to prevent security breaches and to ensure public safety. However, they are not easy to detect when in the air. Small drones transmit very limited electromagnetic signals, making it very difficult for conventional radar to detect them [
2]. Acoustic and radio frequency detection are expensive [
6] and cannot deal with the Doppler effect well [
6]. Conversely, object detection using deep learning has achieved substantial success due to its high accuracy and available computing power [
6]. In fact, the “You Only Look Once” (YOLO) algorithm has surpassed other object detection algorithms such as the Region-Based Convolutional Neural Network (R-CNN) and the Single-Shot Multi-box Detector (SSD) because of its highly precise real-time detection capability [
6]. YOLO is superior in terms of both accuracy and speed [
7]. Though it has various versions, YOLOv4 is one of the latest, achieving 10% more average precision (AP) on the Microsoft Common Objects in Context (MS COCO) dataset than the previous version, YOLOv3 [
8]. In this research, the YOLOv4 algorithm was used to detect drones because of its real-time detection capability and high level of precision.
2. Background
Deep learning is a state-of-the-art technique that has shown great promise in computer vision and pattern recognition. Techniques based on convolutional neural networks (CNNs) can predict class and bounding boxes by extracting deep high-level features from an object, a process known as object detection. CNNs are useful for performing detection, recognition, and segmentation tasks [
2]. They follow layer-based approaches, where the lower layers extract low-level features such as edges, the mid-level layers extract droplet-like structures, and the top-level layers define the object [
9]. Deep learning-based object detection techniques can be divided into two types: two stage and one stage. Two-stage object detectors are basically R-CNNs. R-CNNs first use a selective search algorithm to generate a large number of region proposals. Then, a CNN is used for feature extraction from each region proposal. Finally, the R-CNN classifies various classes and defines bounding boxes [
10]. To speed up such calculations, Fast R-CNNs [
11], Faster R-CNNs [
12], and Mask R-CNNs [
13] have all been proposed.
To overcome the slowness of R-CNNs, [
11] developed an algorithm called the Fast R-CNN. The Fast R-CNN is different from the R-CNN in that it does not split regions into any region proposals; rather, it first applies a CNN and then allocates region estimation to the neural network’s property map. For final classification, it uses Softmax rather than a support vector machine (SVM). If a CNN is used only once, the speed of the algorithm increases. To further improve the estimation time, [
12] proposed Faster R-CNN. Like Fast R-CNN, it applies the CNN first and then creates a feature map. Faster R-CNN does not conduct any region recommendations (much like Fast R-CNN). Instead, it uses a selective search algorithm, and the rest of the approaches are similar to Fast R-CNN.
Unlike region-based approaches, one-stage techniques look at an image only once. YOLO is a popular example of this kind of approach. It involves a single neural network trained end-to-end, which takes an image as input and directly predicts bounding boxes and class labels. The technique offers lower predictive accuracy (e.g., more localization errors) but operates at 45 to 155 frames per second (FPS), providing a speed-optimized version of the model [
14]. Two-stage object detection methods spend comparatively more time on receiving proposals. Thus, one-stage object detectors and SSDs are used in various real-time object detection applications such as in traffic scenes [
15], high voltage insulators [
16], and airplane detection [
17]. The authors of [
14] proposed the first version of YOLO, which provides class prediction with bounding boxes and class probabilities. Later, [
18] proposed YOLOv2, which outperformed the first version of YOLO in terms of speed and accuracy. To further improve the accuracy, [
7] proposed a bigger YOLO network known as YOLOv3, which achieved higher accuracy than the previous versions. The authors of [
8] proposed YOLOv4, which considers universal parameters such as weighted residual connections, cross-stage partial (CSP) connections, cross mini-batch normalization (CmBN), self-adversarial training (SAT), Mish activation, mosaic data augmentation, DropBlock regularization, and CIoU loss, combining some to achieve state-of-the-art results: 43.5% AP (65.7% AP50) for the MS COCO dataset at a real-time speed of ~65 FPS on the Tesla V100. In fact, YOLOv4 outperforms its previous versions in terms of both accuracy and speed. For example, YOLOv4 improved upon YOLOv3’s AP and FPS by 10% and 12%, respectively.
Tracking and detecting drones is challenging and a critical issue where preventing security breaches is a priority. A drone attack at London Gatwick Airport resulted in the airport being shut down for 18 h, delaying 760 flights and affecting 120,000 passengers [
19]. Deep learning is a promising means of detecting and identifying drones [
3]. The authors of [
20] used CNN-based network architectures such as Zeiler and Fergus (ZF) and the Visual Geometry Group (VGG16) to transfer learning and to detect drones. Their results showed that VGG16 with Faster R-CNN performed better than other architectures did on a training dataset containing five MPEG4-coded videos taken at different times. The authors of [
21] proposed an audio-based drone detection technique using CNN, a recurrent neural network, convolutional recurrent neural network algorithms, and the unique acoustic fingerprints of flying drones. Their dataset consisted of audio recorded samples of drone activities. The authors of [
3] used YOLOv2 to detect loaded and unloaded UAVs. The authors of [
2] used YOLOv3 and 150 epochs to detect and classify various types of drones. Their dataset contained more than 10,000 images of different categories of drones. The authors of [
22] proposed an OpenCV-based drone detection system, achieving 89% accuracy. Their dataset contained 2088 positive and 3019 negative examples. Reference [
10] used YOLOv3 to achieve better detection accuracy and obtained more accurate bounding boxes. Their experimental configurations were as follows: a 64-bit Ubuntu 16.04 operating system with a hardware configuration comprising an Intel Xeon E5-2630 v4 processor, a GPU model NVIDIA GeForce GTX 1080 Ti, and memory for 11G. The experiment was run on the Darknet framework. The authors of [
19] achieved 88.9% average accuracy in detecting drones. These researchers used input images that were 416 × 416 in size on YOLOv3, pre-trained weights, and transfer learning. The researchers integrated their trained model on a NVIDIA Jetson TX2 for real-time detection. A total of 1500 drone images were manually sorted to remove those that were irrelevant; a total of 1435 were prepared for training. Reference [
6] used YOLOv4 to detect low-altitude UAVs, finding that YOLOv4 performed better than YOLOv3 in terms of accuracy and speed. Due to a lack of public low-altitude data, they built their own dataset by flying three types of drones in various conditions: the DJI-Phantom, DJI-Inspire, and XIRO-Xplorer. Later, they mixed their dataset with drone images collected from the internet. Their comparison results consisted only of these three drones. The experiment was conducted using a NVIDIA RTX2060 OC and 6G RAM. The maximum number of iterations was 100,000, the momentum and decay were 0.9 and 0.0005, respectively, and the batch size was 64. YOLOv4 achieved an accuracy of 89.32%, 5.18% higher than YOLOv3.
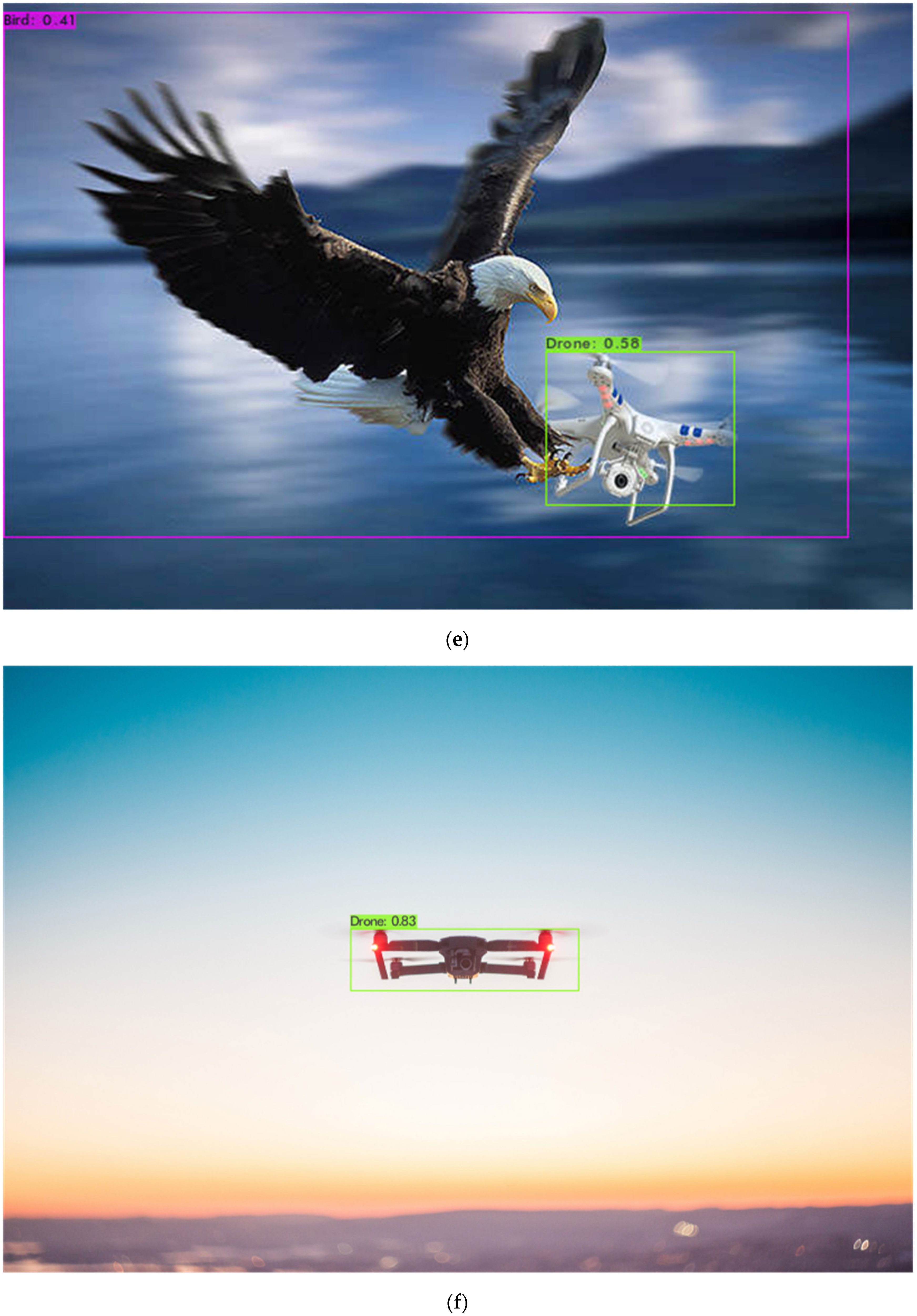
Due to shape similarities while in the air, drone and bird images are often used in combination. The authors of [
23] trained a combined drone-bird dataset using three machine learning models: CNN, SVM, and k-nearest neighbor. The authors achieved the highest accuracy using the CNN model, achieving an accuracy of 93%. The authors of [
24] presented a second edition of “drone-vs-bird” detection, in which they summarized the four best-performing models. All four were based on the CNN algorithm, and the best achieved a 0.73 F1-score. Reference [
25] prepared a drone-bird dataset in order to detect drones using the YOLOv2 object detector algorithm. The authors in [
26] created a large database of drones and birds in order to classify them using a CNN algorithm, achieving 99.6% validation and 94.4% test accuracy.
In this study, we chose to use the state-of-the-art in object detection, the YOLO-v4 algorithm, because of its real-time detection capabilities, high speed, and accuracy. To train this neural network architecture, we collected 479 images of 300 species of birds and 1916 images of drones from public resources. We prepared our own drone dataset to verify the drone detection capability. We chose to use bird images due to their similarity to drones. We used mean average precision (mAP) as our evaluation metric to evaluate the object detector’s performance. Using the collected and prepared dataset, the trained YOLOv4 neural network was evaluated in terms of its detection ability, location precision, and mAP. The next section discusses the YOLOv4, our chosen methodology, in detail.
3. Materials and Methods
YOLOv4 [
8] introduces new universal features (i.e., WRD, CSP, CmBN, SAT, Mish activation, mosaic data augmentation, DropBlock regularization, and CIoU loss) in combination to achieve high AP and FPS. YOLOv4 follows a one-stage detector architecture comprised of four parts: input, backbone, neck, and dense prediction or head. The input is the set of data we want to detect. The backbone is responsible for extracting features and uses the image dataset to make the object detector scalable and robust. It is comprised three parts: bag of freebies (BoF), bag of specials (BoS), and CSPDarknet53. The head uses same strategy as YOLOv3 [
7].
3.1. Bag of Freebies
BoF is a strategy used to train the object detector offline without increasing inference cost. There are various strategies available in computer vision to achieve the goal of BoF, but YOLOv4 uses specific techniques for both the backbone and the detector. Important BoF strategies used in YOLOv4 include CutMix, mosaic data augmentation, label smoothing, IoU loss, and DropBlock regularization.
Data augmentation is used to improve the robustness of the object detection model. The result is an increase in the variability of images so that an unknown environment will not create any issues for the detector model. Adjusting the brightness, contrast, hue, saturation, and noise of an image assists with overcoming photometric distortion. Random flipping, scaling, cropping, and rotating are used to overcome geometric distortions. Other than such pixel-wise adjustments, random erase, MixUp, CutMix, style transfer, GAN, etc., can also be used.
BoF uses focal loss (FL) to deal with the issue of data imbalance. In classification problems, the cross entropy (CE) loss function is used; however, it cannot smoothly handle misclassified targets. Thus, FL is introduced, which is basically a modified version of CE. In FL, an additional co-efficient
is used.
Label smoothing is introduced in YOLOv4, which is basically the concept of distillation. Label smoothing converts hard labels into soft
, producing robustness in the model. Another important improvement in YOLOv4 is the inclusion of IoU loss. In conventional object detection models, l
1 or l
2 losses are calculated in order to evaluate the bounding box prediction; this tends to minimize errors on small objects and large bounding boxes. IoU loss overcomes this issue in YOLOv4 because of its mathematical representation.
3.2. Bag of Specials
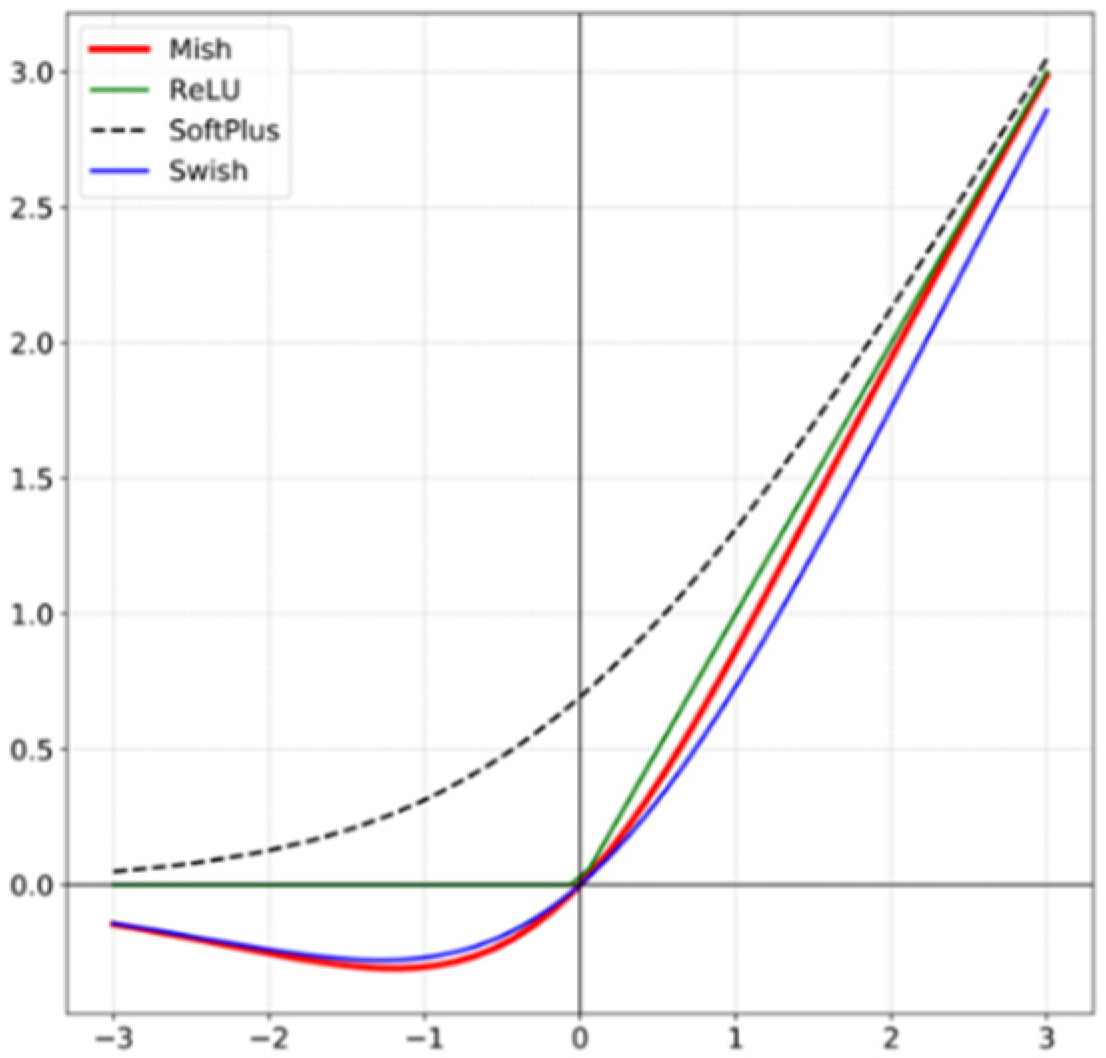
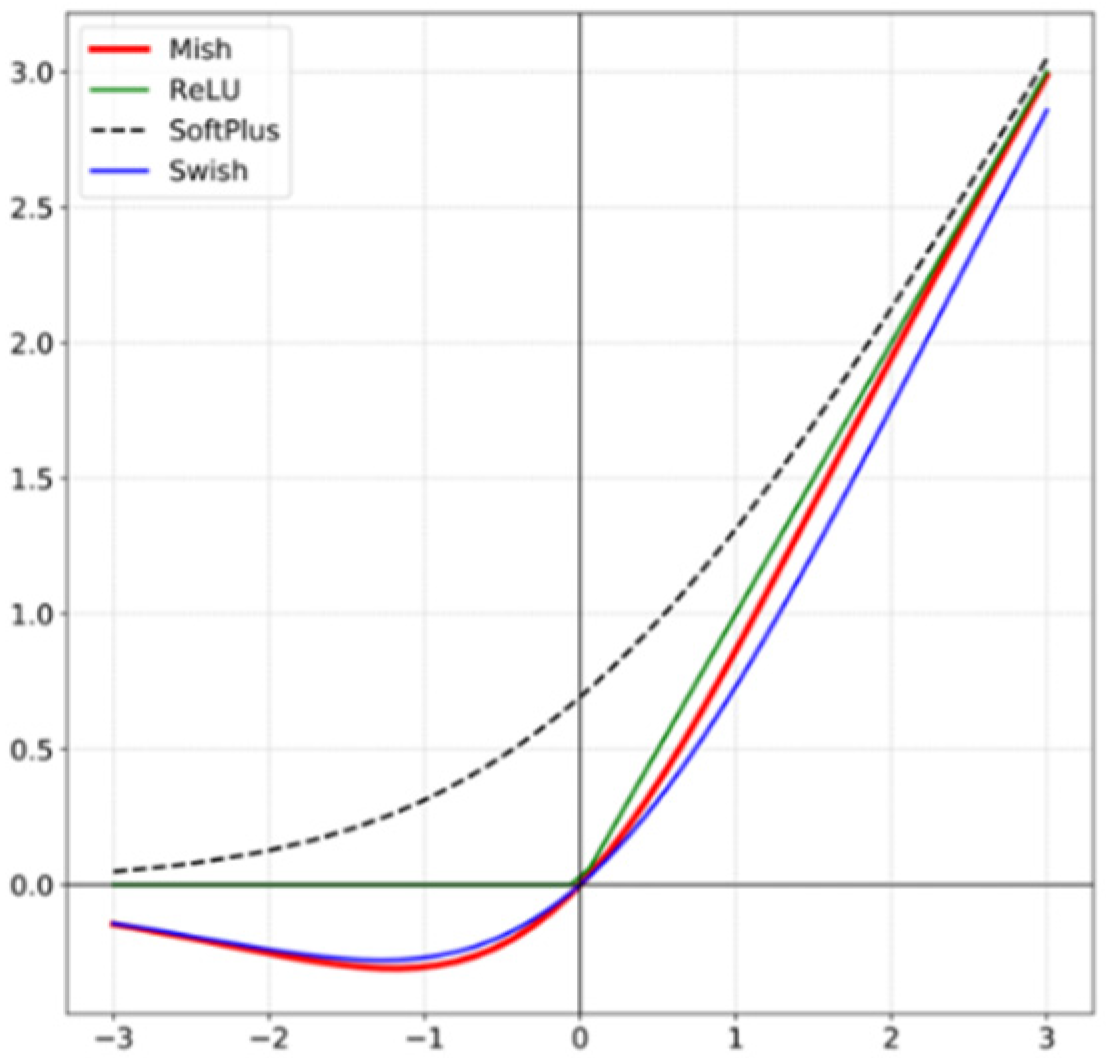
YOLOv4 introduces a set of strategies called BoS to improve object detection accuracy by increasing a small amount of inference costs. Various techniques are incorporated in order to implement BoS, but the most significant improvements include Mish activation, CSP connections, SPP-block, and PAN path-aggregation block. Mish activation considers the negative information, thus solving the dying ReLU phenomenon and providing strong regularization effects during training to overcome the overfitting issue. The Mish activation function is shown in
Figure 1.
3.3. CSPDarknet53
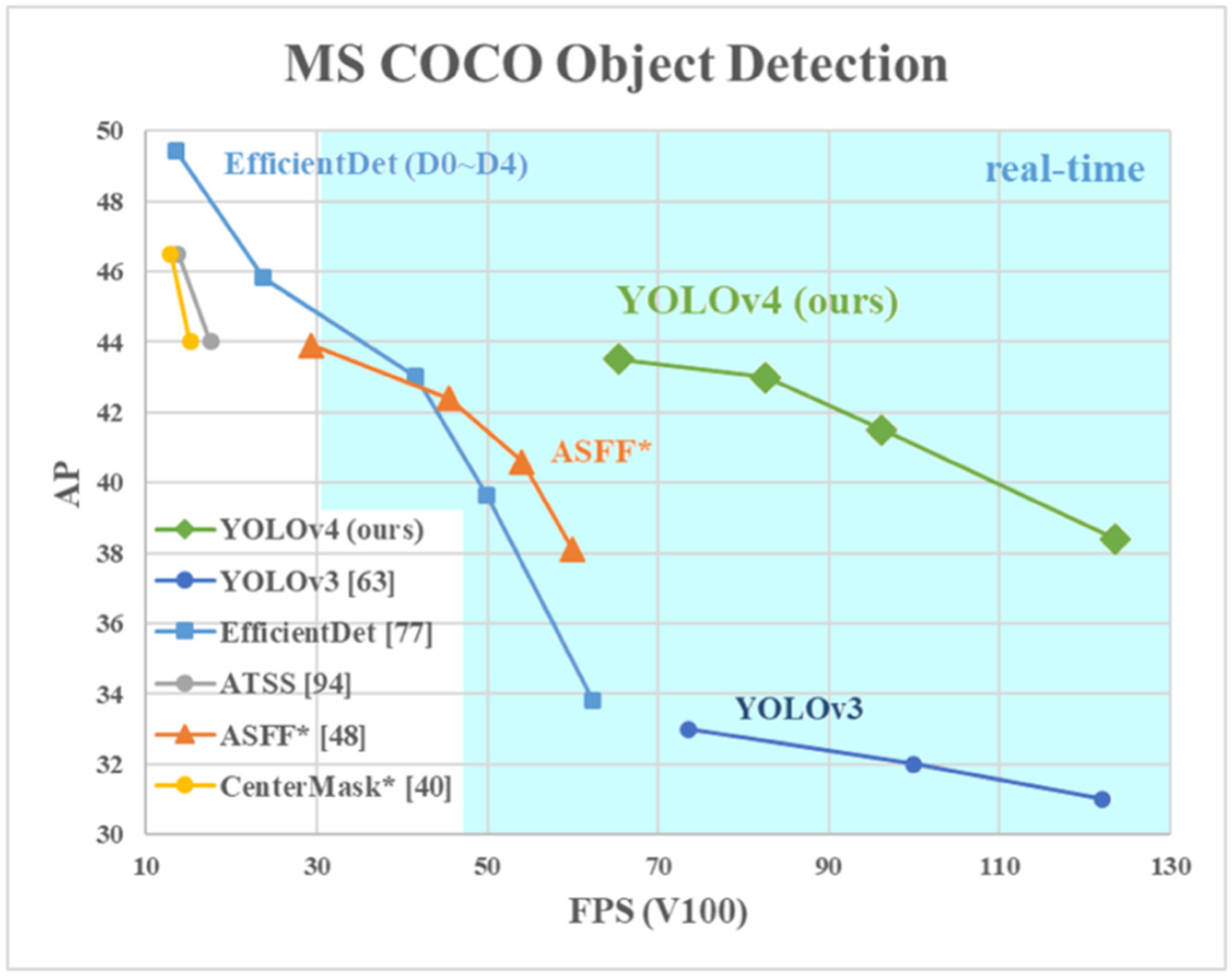
YOLOv4 uses CSPDarknet53 as its detection architecture. Though CSPResNext50 performs better for classifying objects in ILSVRC20212 (ImageNet), CSPDarknet53 performs better when detecting objects in the MS COCO datasets [
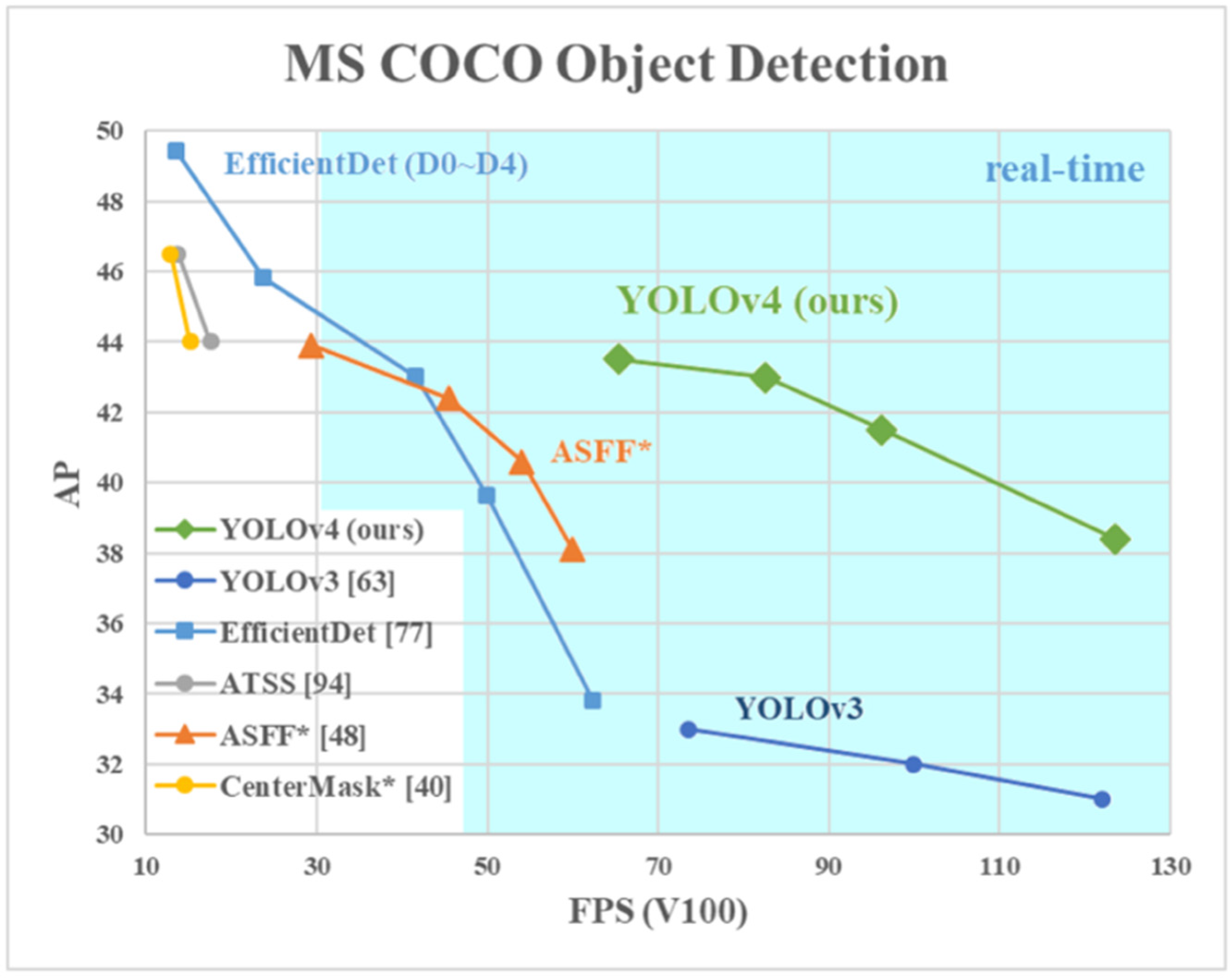
8]. A performance graph of the original YOLOv4 can be found in
Figure 2. In
Figure 2, performance evaluation metrics, fps, and AP, are compared with other methods. The performance of YOLOv4 is shown in green, and it is labeled as “YOLOv4 (ours)”.
Figure 2 from the original YOLOv4 paper shows superior performance compared to the other object detection methodologies and was one of the reasons behind our choice to use YOLOv4 for detection purposes. CSPDarknet53 consists of 29 layers of 3 × 3 filters, 725 × 725 receptive fields, and 27.6 M parameters. This architecture has proven to be superior to its competitor architecture, CSPResNext50 [
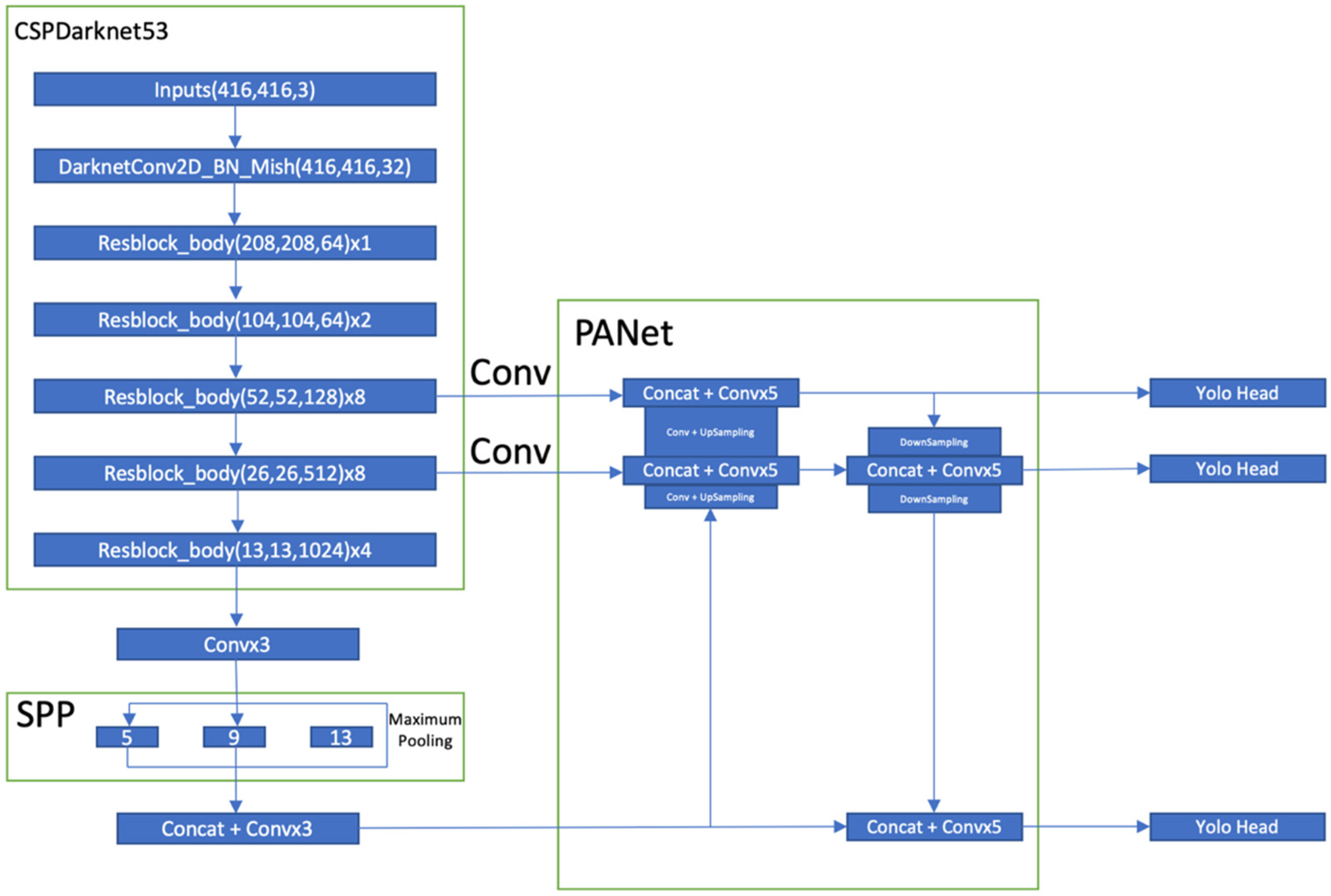
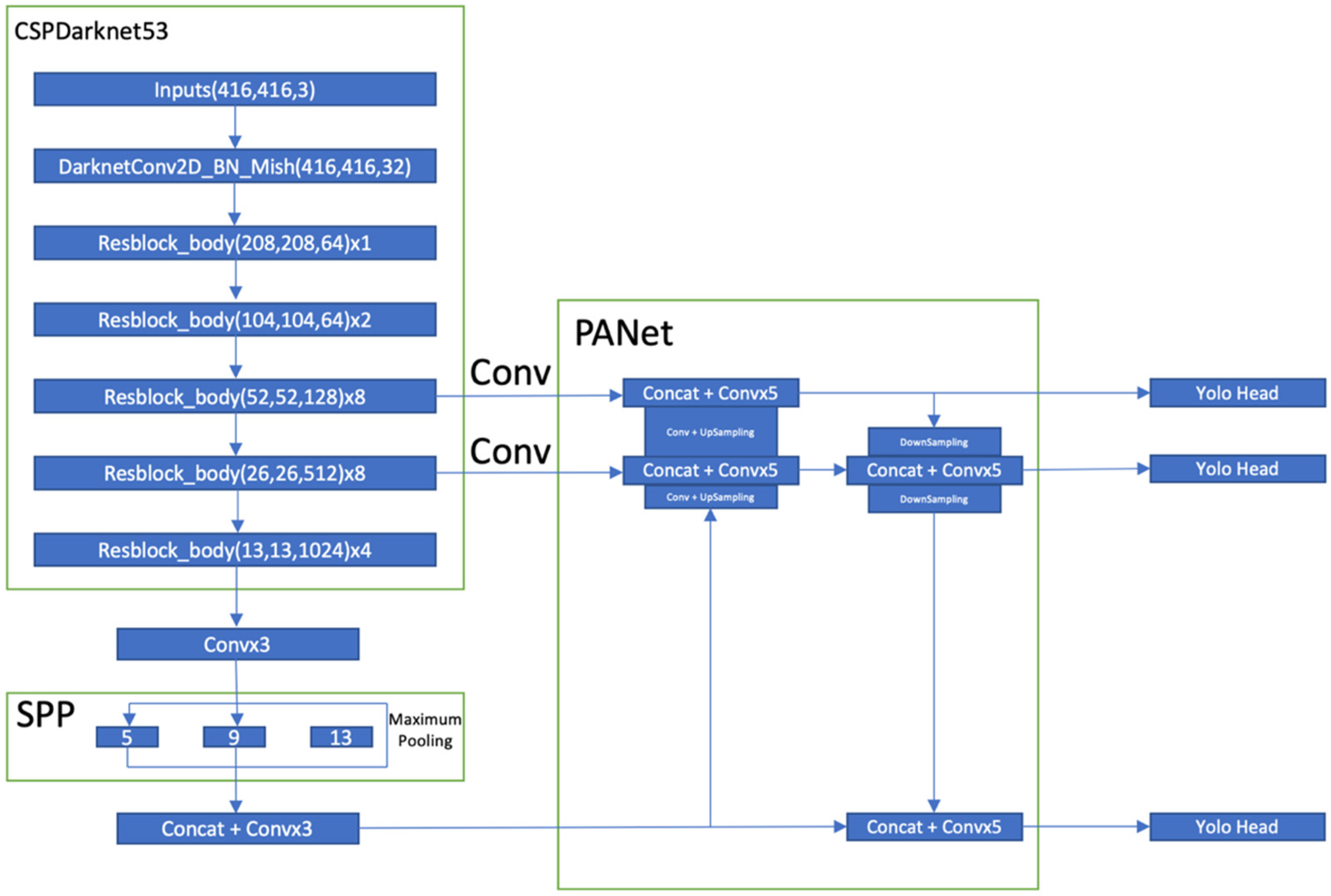
8]. The addition of an SPP block over the CSPDarknet53 significantly increases the receptive field performance by bringing out contextual features. YOLOv3’s FPN is replaced by PANet in YOLOv4 as a parameter aggregation method. The final YOLO head is based on the strategy of YOLOv3. In short, the YOLO head works in three steps. First, it divides the entire image into N × N grids. Each grid has five parameters (i.e., x, y, w, h, and c; object_confidenc_score), where (x, y) is the offset value between the prediction box and the respective grid cell bound, (w, h) is the width and height from the prediction box to the entire image, and object_confidence_score expresses the probability of the class object. A CNN extracts the feature and predicts classes with class probability scores. Finally, non-maximum suppression is used to eliminate the repetitive bounding boxes and to produce a single bounding box for each class. The overall detection architecture for YOLOv4 is given below in
Figure 3.
5. Discussion
Previous studies on this topic have mostly focused on drone detection. Few have considered both drones and birds as detection classes. In fact, “Drone vs. Bird” is a popular challenge competition in which participants are asked to design object detectors to detect drone and bird classes [
24]. Our main goal was to detect drones and drone-like objects such as birds in order to compare our work with previous studies such as [
20,
24]. In [
20], the researchers used various deep CNN architectures. Their methodology employed Faster RCNN for object detection, an anchor-based algorithm similar to YOLO. Using ZF, VGG16, and VGG_M_1024, the authors achieved mAP values of 0.61, 0.66, and 0.60, respectively. Their proposed methodology successfully detected both drones and birds. VGG16 performed better because they fine-tuned the architecture and trained their dataset on top of the ImageNet model. In our methodology, a trained YOLOv4 weighted on the MS-COCO dataset was used. Our neural network architecture was tuned to only fit our custom dataset. In addition, our model considered drone detection at three defined altitudes, and the trained model was evaluated using our own drone videos. In addition to mAP, FPS, precision, recall, and F1-score were used as evaluation metrics. Our methodology outperformed the highest mAP of 0.66, achieving a mAP of 0.7436. The authors of [
24] compared the top four teams’ neural network models in the Drone vs. Bird detection challenge. The authors found that the top four teams achieved F-1 scores of 0.12, 0.41, 0.68, and 0.73. In our methodology, an F-1 score of 0.79 was achieved.
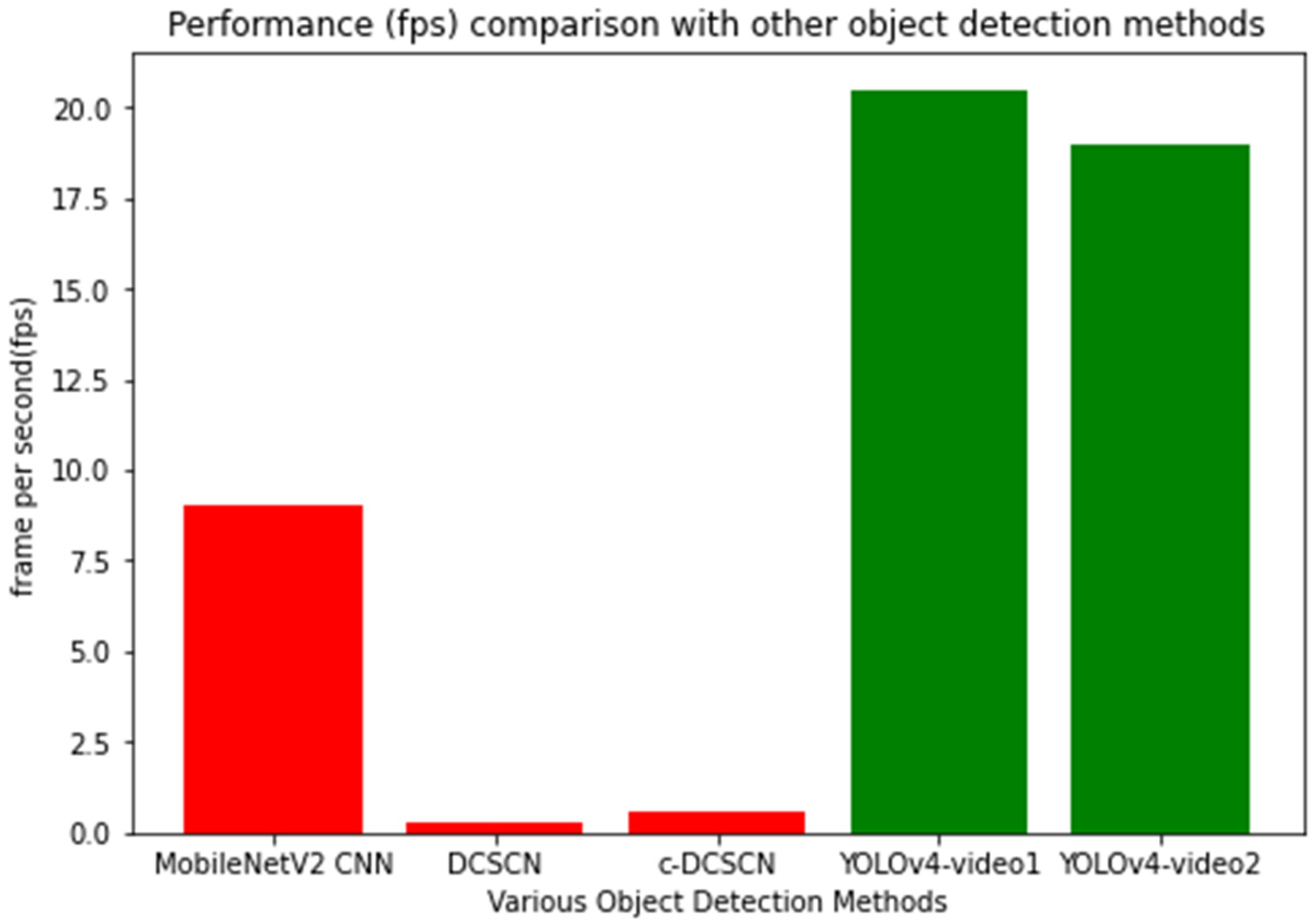
In our study, fps was one of the key parameters to be considered while evaluating the performance of the detector. This parameter is widely used for testing the speed of detection in videos. Depending on the available computing resources, such as random-access memory (RAM), graphical processing unit (GPU), or central processing unit (CPU), this parameter varies a lot. Even the length of the video may play a role while comparing fps. Here, we considered similar research for comparison purposes only. The authors of [
28,
29] performed drone and bird detection in real time. Their methodologies calculated the fps while evaluating their performances. In [
28], they introduced two methodologies, Deep Residual CNN with Skip Connection and Network in Network (DCSCN) and a compact version of DCSCN (c-DCSCN), for “drone”, “bird”, and “rest” classes detection. They incorporated a super-resolution technique for long range video surveillance. Using the methodologies, they successfully detected drones in videos, and their average fps was 0.32 and 0.58, respectively, for DCSCN and c-DCSCN. In their techniques, a Faster-RCNN was trained for 70k iterations. Other hyperparameters were learning rate (0.001) and stochastic gradient descent (momentum: 0.9 and weight decay: 0.0004). They used a NVIDIA GeForce TITAN XP with 12 GB memory. Their fps is shown in
Figure 9 with red bars. Similarly, in [
29], they trained a MobileNetV2 CNN to detect drone and objects similar to drones such as birds or airplanes. They incorporated a background subtraction technique to increase the accuracy and speed. They achieved an average detection speed of 9 fps. They used the SGD optimization algorithm with a learning rate of 0.05, a momentum of 0.9, and weight decay of 0.001. They used a NVIDIA GeForce GT 1030 2 GB GPU for training and detection. Only the fps of their performance is shown in
Figure 9, which is depicted in red and is labeled as MobileNetV2 CNN. In terms of fps, our performance is shown in green bars for two videos. Comparing other methodologies, we used free and publicly available Google CoLab RAM of 12 GB. We used free GPU from Google, which was dynamic in nature, i.e., based on the availability that Google provides the configuration. At the time of implementation, we used a Tesla T4 with unknown memory. Using these low-cost resources, our fps was 20.5 and 19.0 for video 1 and video 2, respectively. A comparison of the fps parameter is shown in
Figure 9.
In this study, YOLOv4 performed better due to the capability of detecting objects in real-time. The YOLO algorithm predicts a class with localization using only a single pass over an image. Further, YOLOv4 introduces various new features such as WRC, CSP, CmBN, mish activation, mosaic data augmentation, and complete intersection over union loss (CIoU loss), and these new features make it fast. In our case, we fine-tuned the original architecture and trained on top of the YOLOv4 weights, which made it accurate. MOSAIC = 1 performed the data augmentation and provided an artificial augmented dataset on top of our collected dataset. Using the bird dataset further strengthened the classifier while detecting drones against similar objects. The training time was long enough, which also helped to ensure accurate prediction.
6. Conclusions
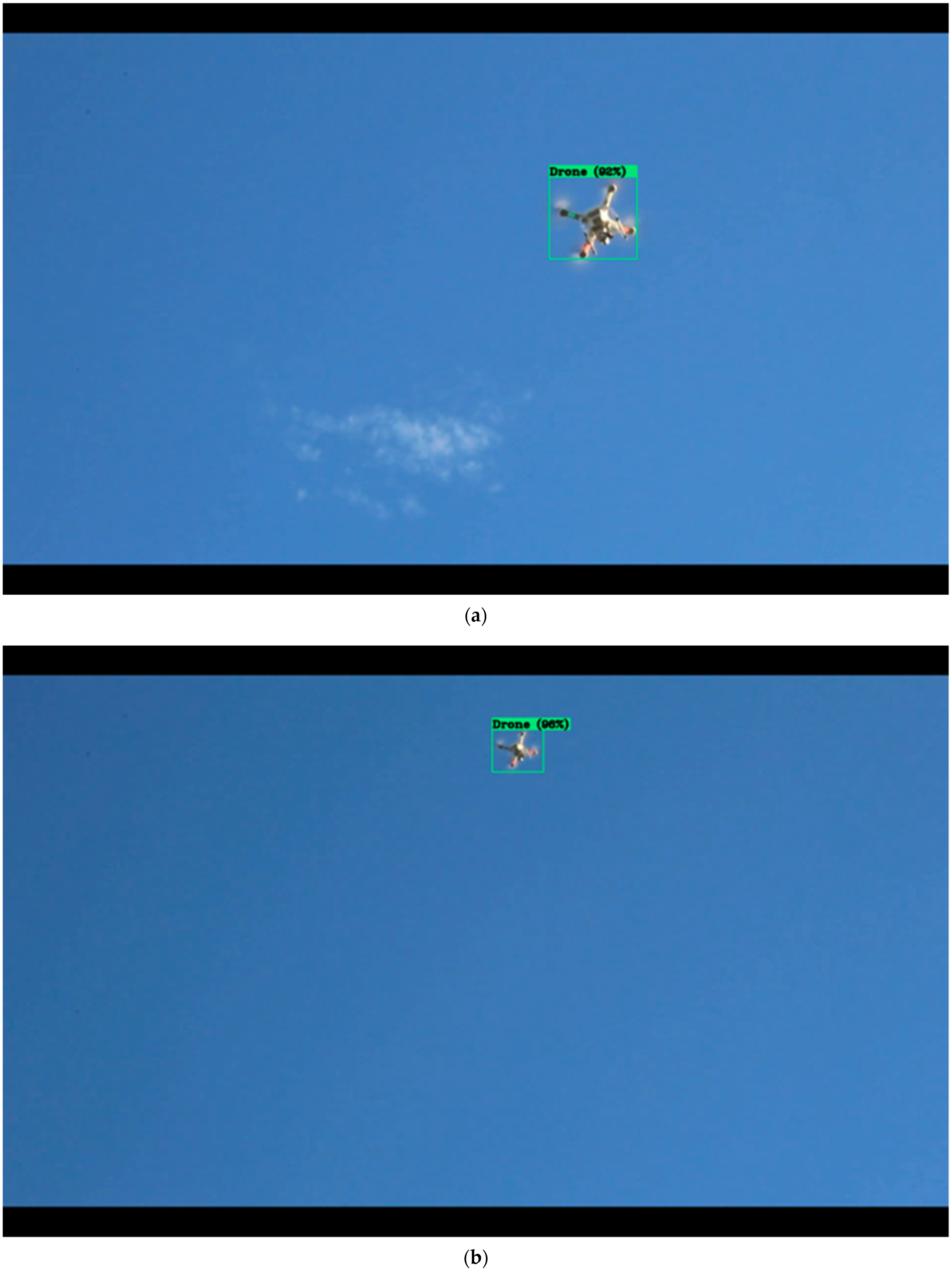
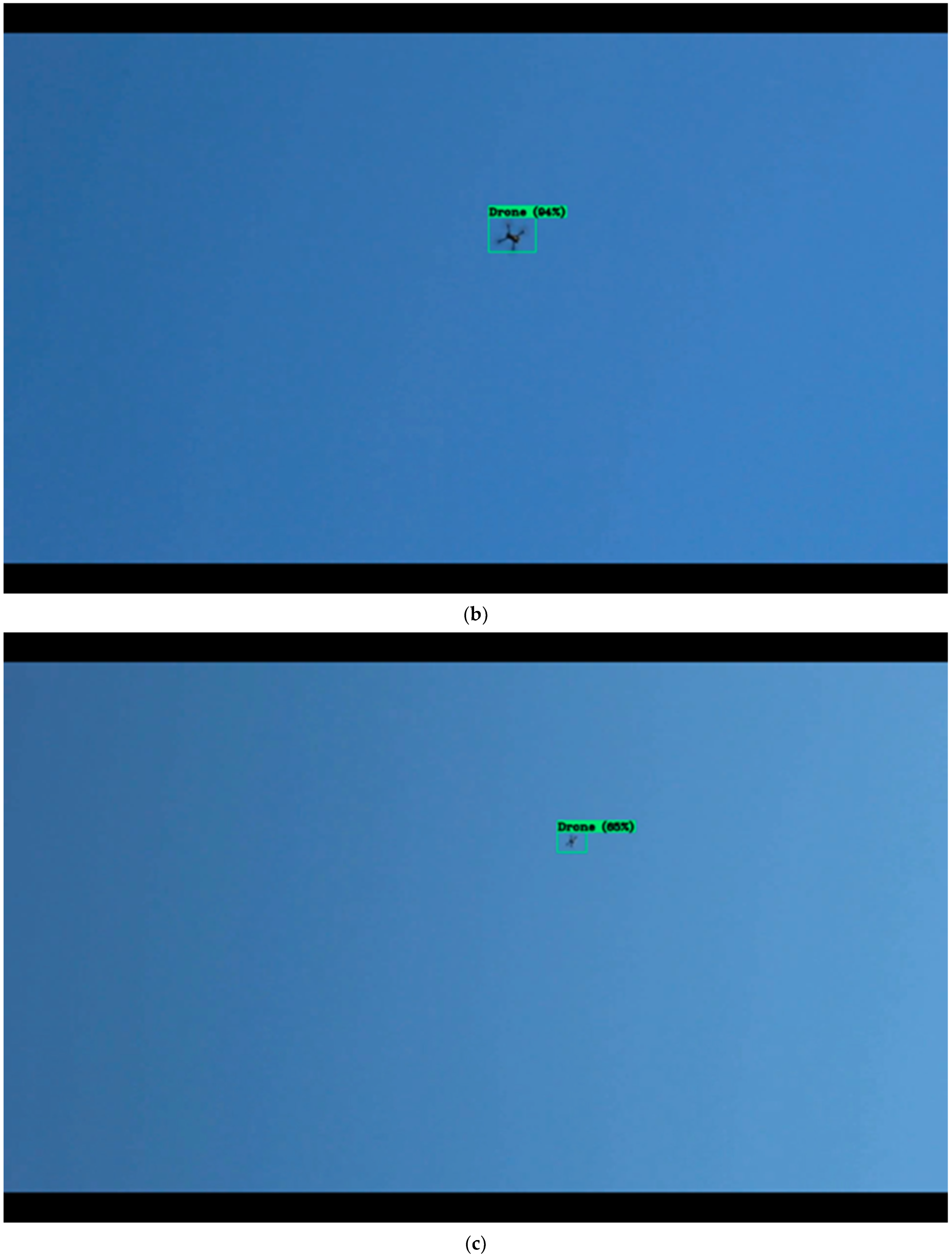
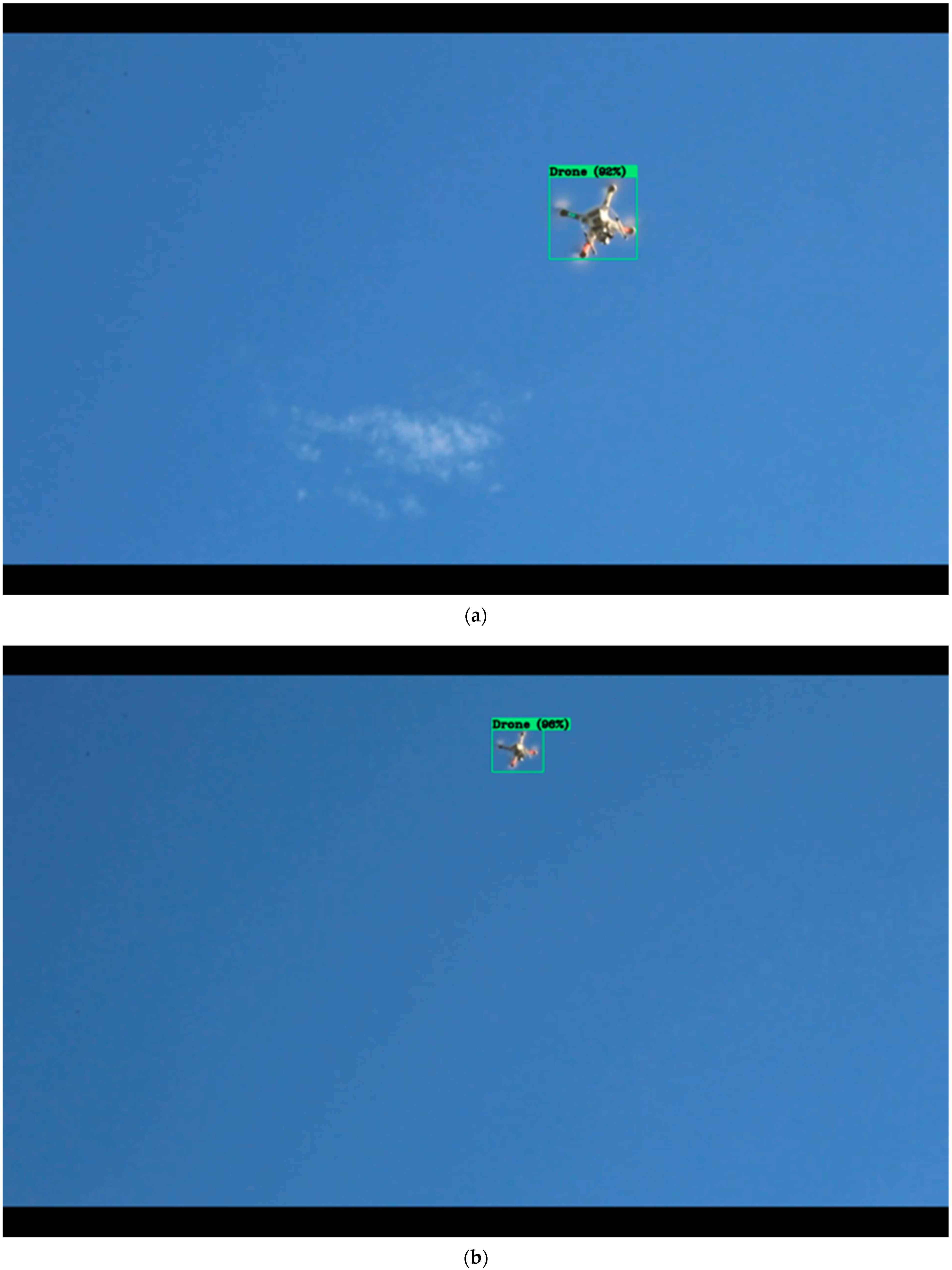
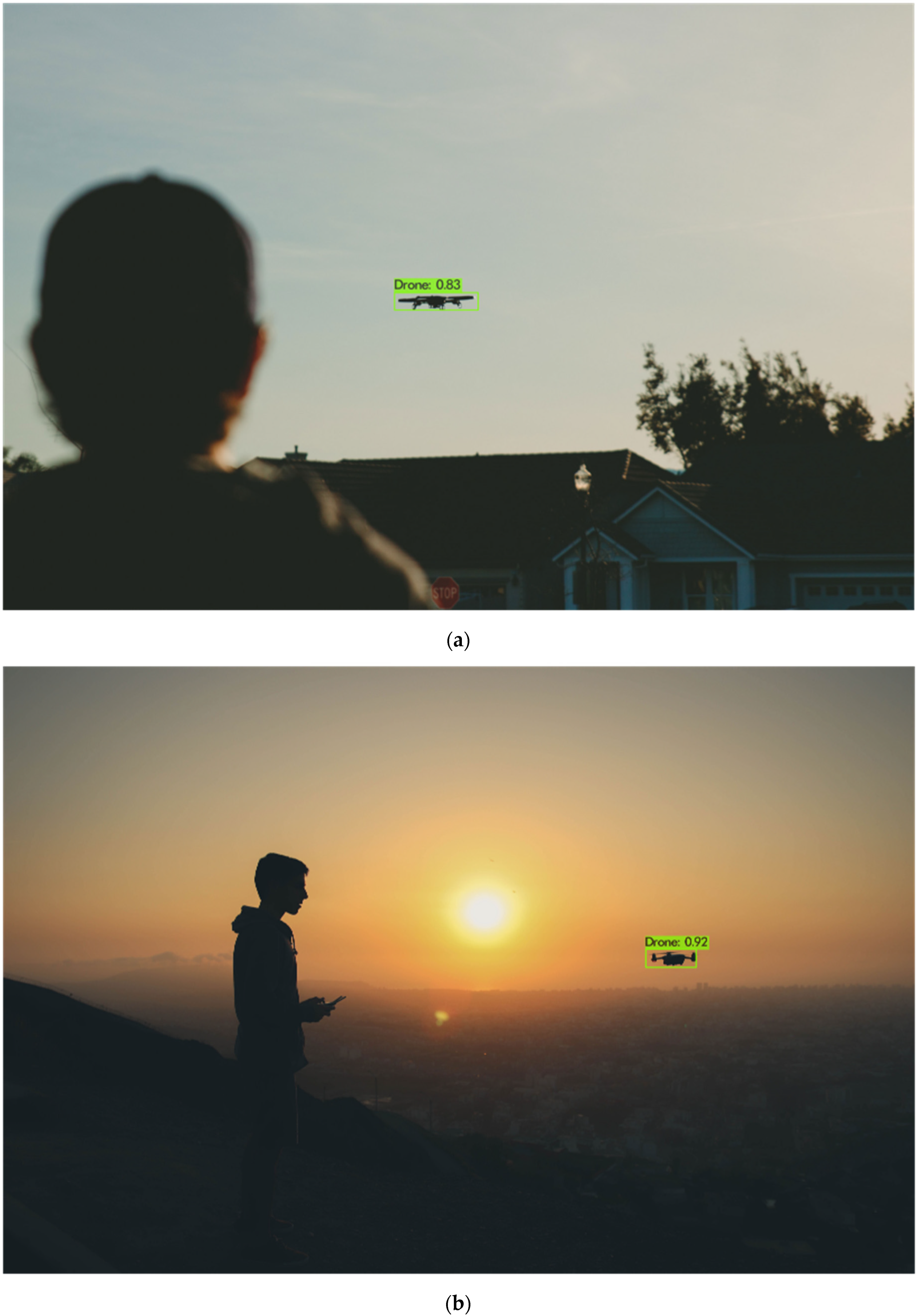
In this research, YOLOv4 was trained to detect drones and drone-like objects (i.e., birds). Our model performed better than those of previous similar studies. Drone detection is necessary, considering that drone intervention is frequent in unauthorized and emergency tasks. However, detecting drones at various altitudes can be difficult, especially due to their small size and high altitude and speed as well as the existence of drone-like objects. Drone and bird image databases were compiled in this research by collecting images from available public resources. Using those collected images, a YOLOv4 model was trained and evaluated via our own drone videos. The performance of the trained YOLOv4 was tested in real time at three different altitudes: 20 ft, 40 ft, and 60 ft. The mAP and FPS evaluation metrics were then calculated to check the performance. Using a Tesla T4 GPU and OpenCV (3.2.0), the YOLOv4 achieved a mAP of 74.36% at an IoU of 50 and FPS of 19.0 for the DJI MAVIC Pro and an FPS of 20.5 for the DJI Phantom III. This study was limited to YOLO implementation only since various object detection algorithms require datasets to be labeled in certain formats, which is time consuming. In addition, speed was one of our considerations while choosing algorithms. In future work, a more diverse image dataset will be used to further improve the results. In addition, other object detection algorithms such as R-CNN, mobilenet, SSD, etc., will be trained and compared. YOLOv5 has already been released; thus, we will further use this version to see if the speed and accuracy improve. More objects will be added alongside the drone and bird images.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}