Unmanned Aerial Systems for Civil Applications: A Review




Abstract
:1. Introduction
2. UAS Classification
3. UAS Subsystems
3.1. Frame
3.2. Propellers
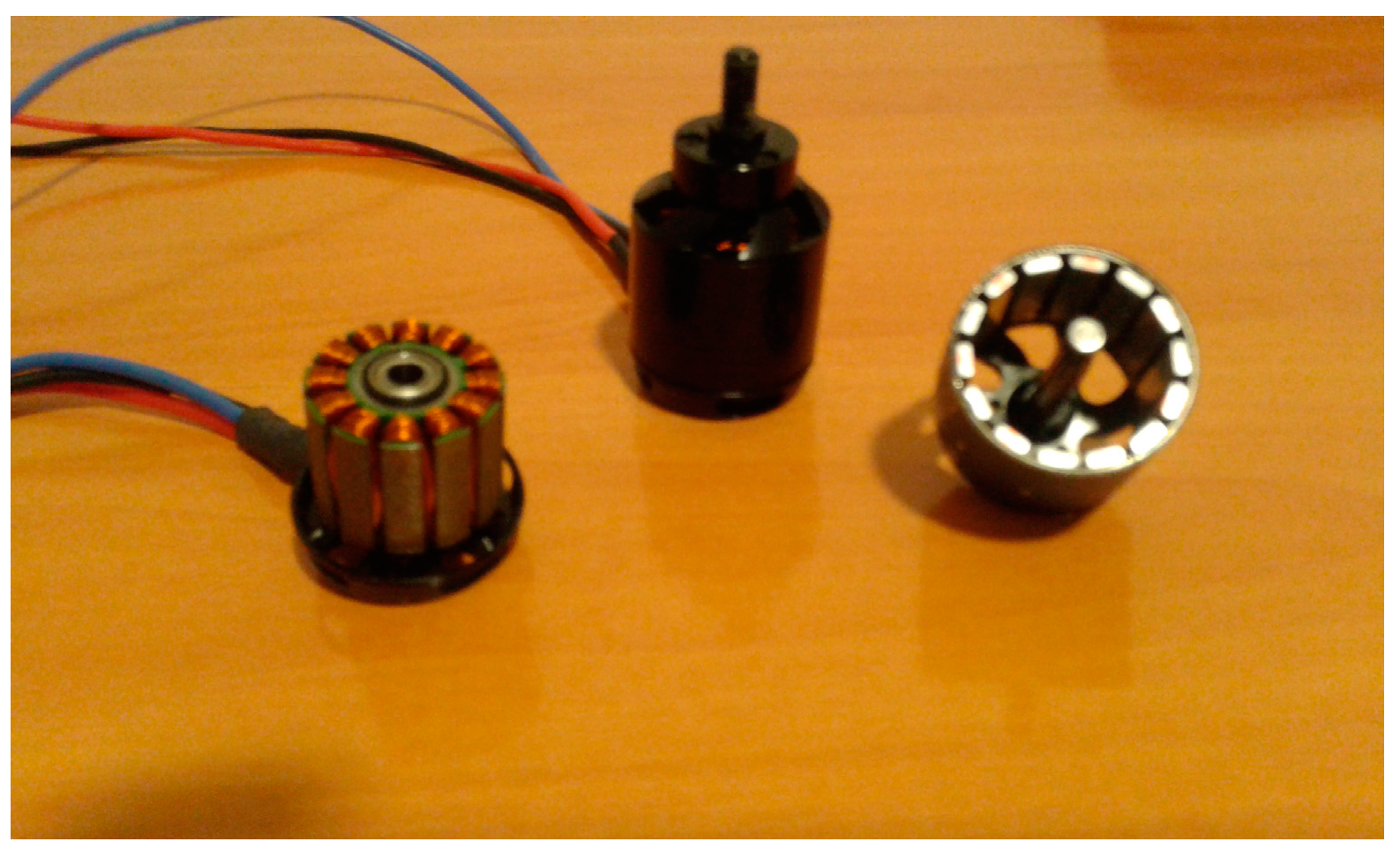
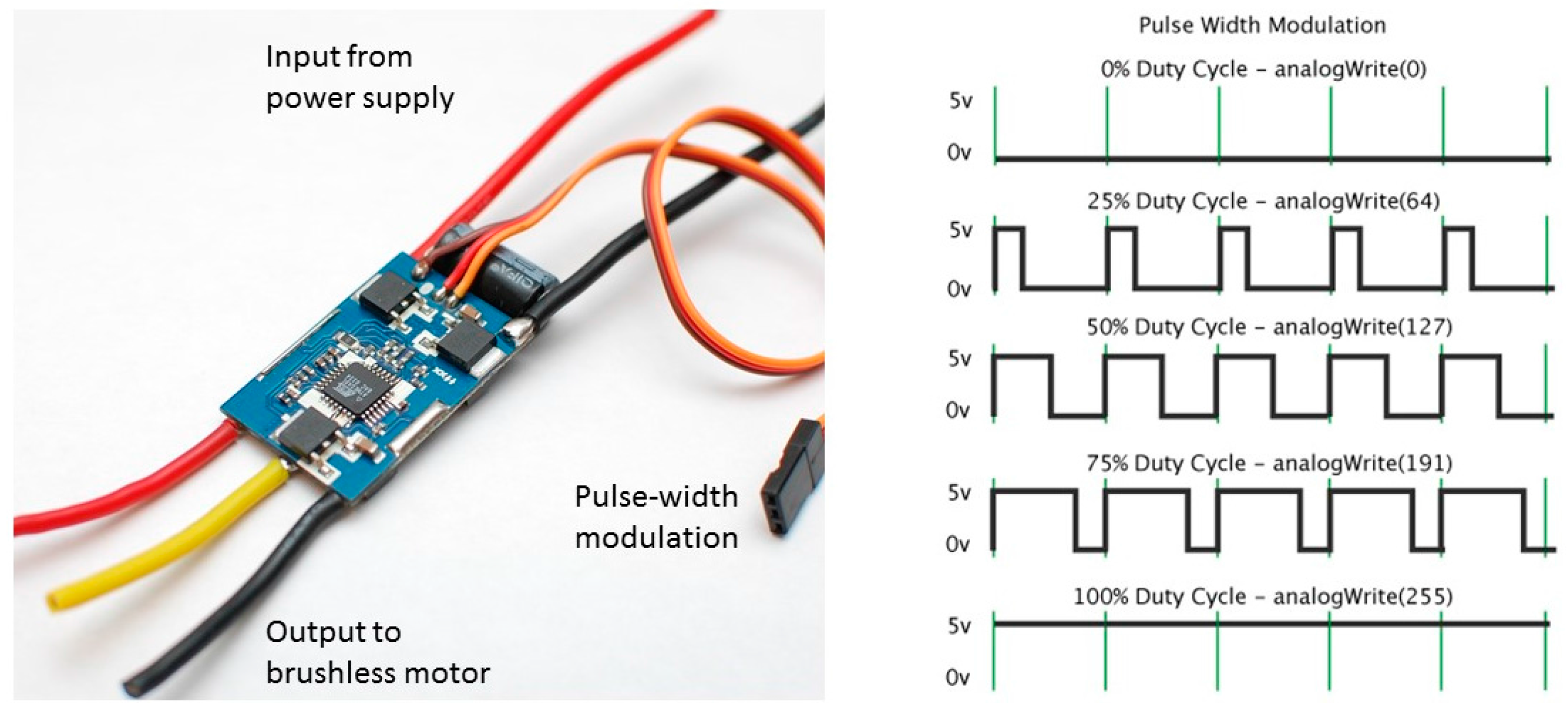
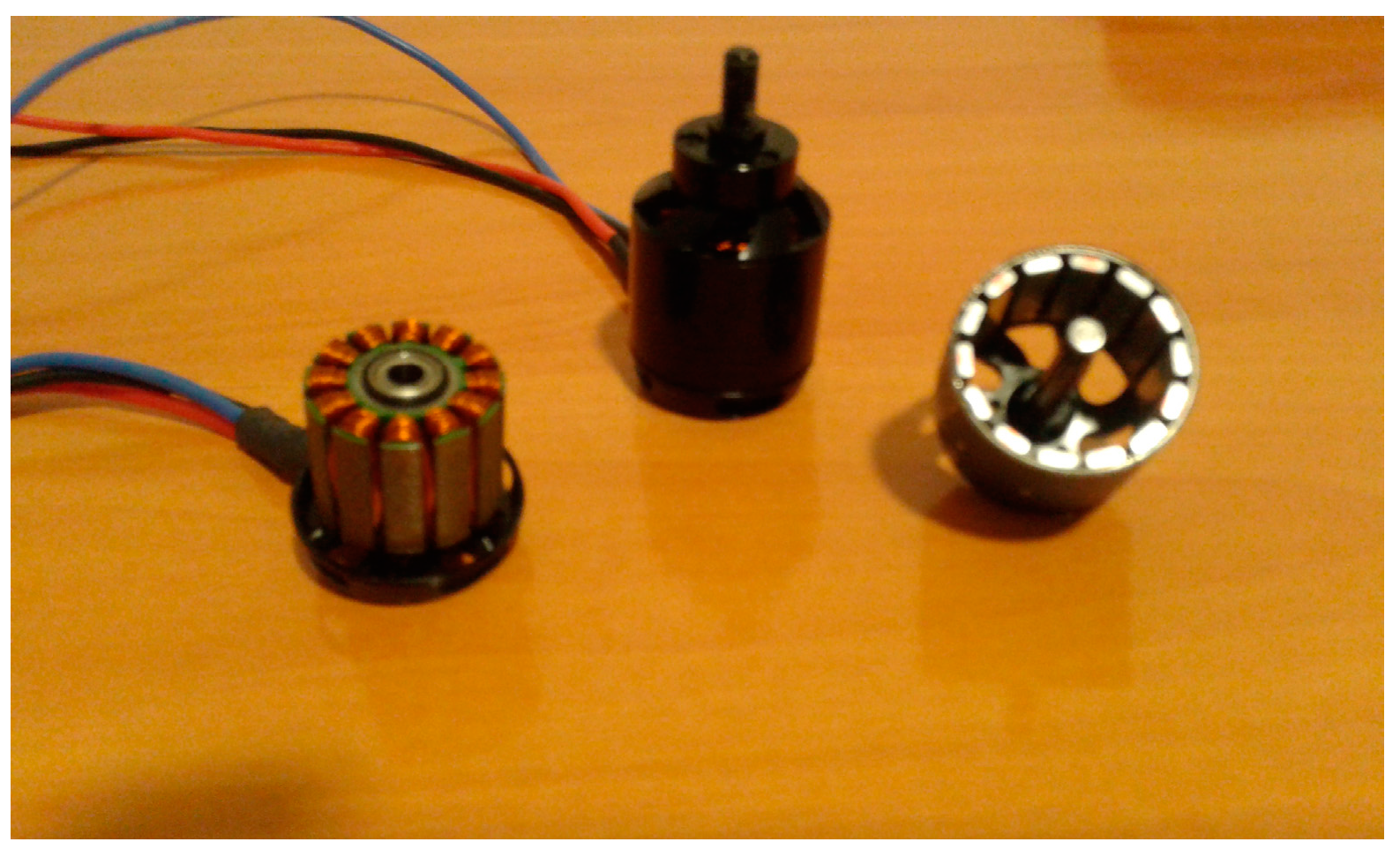
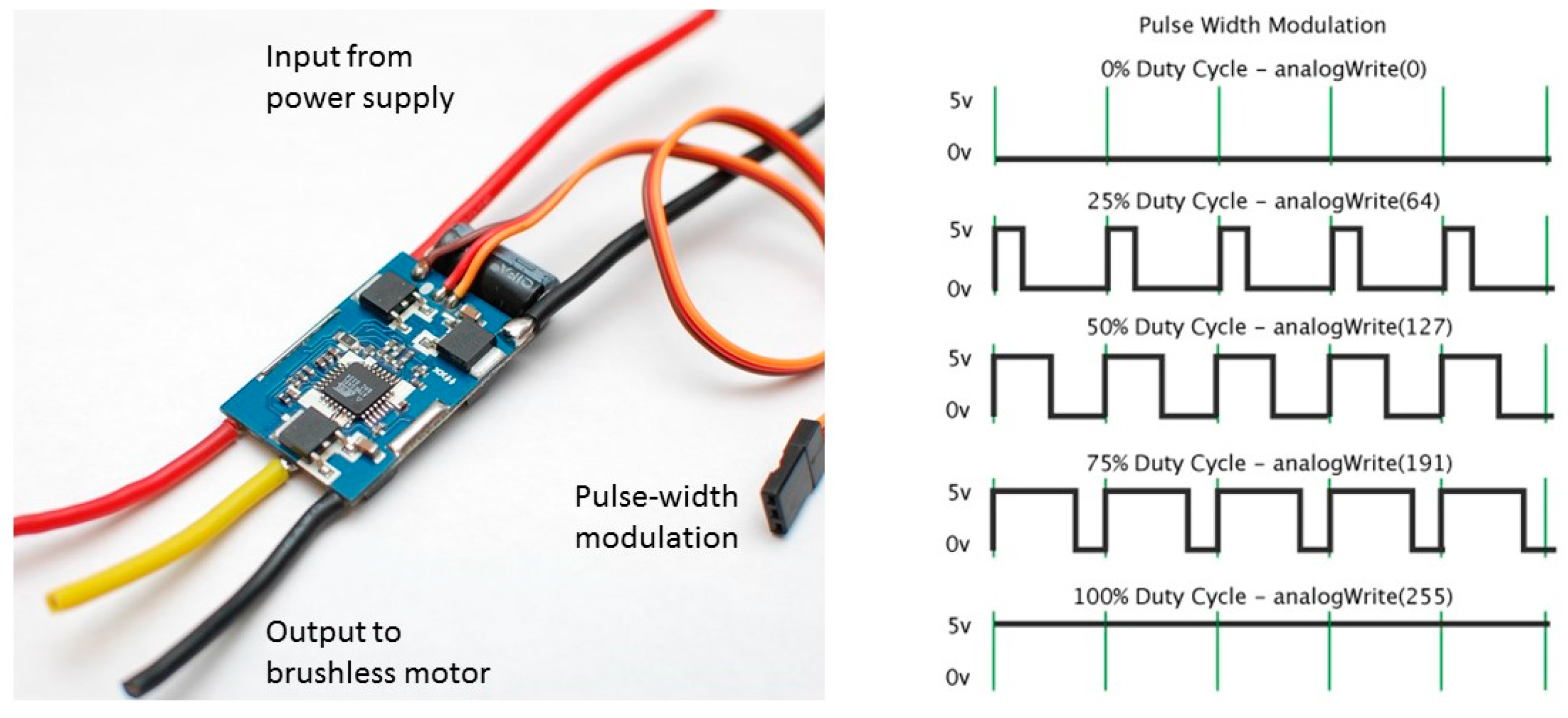
3.3. Motors and Batteries
3.4. Flight Time
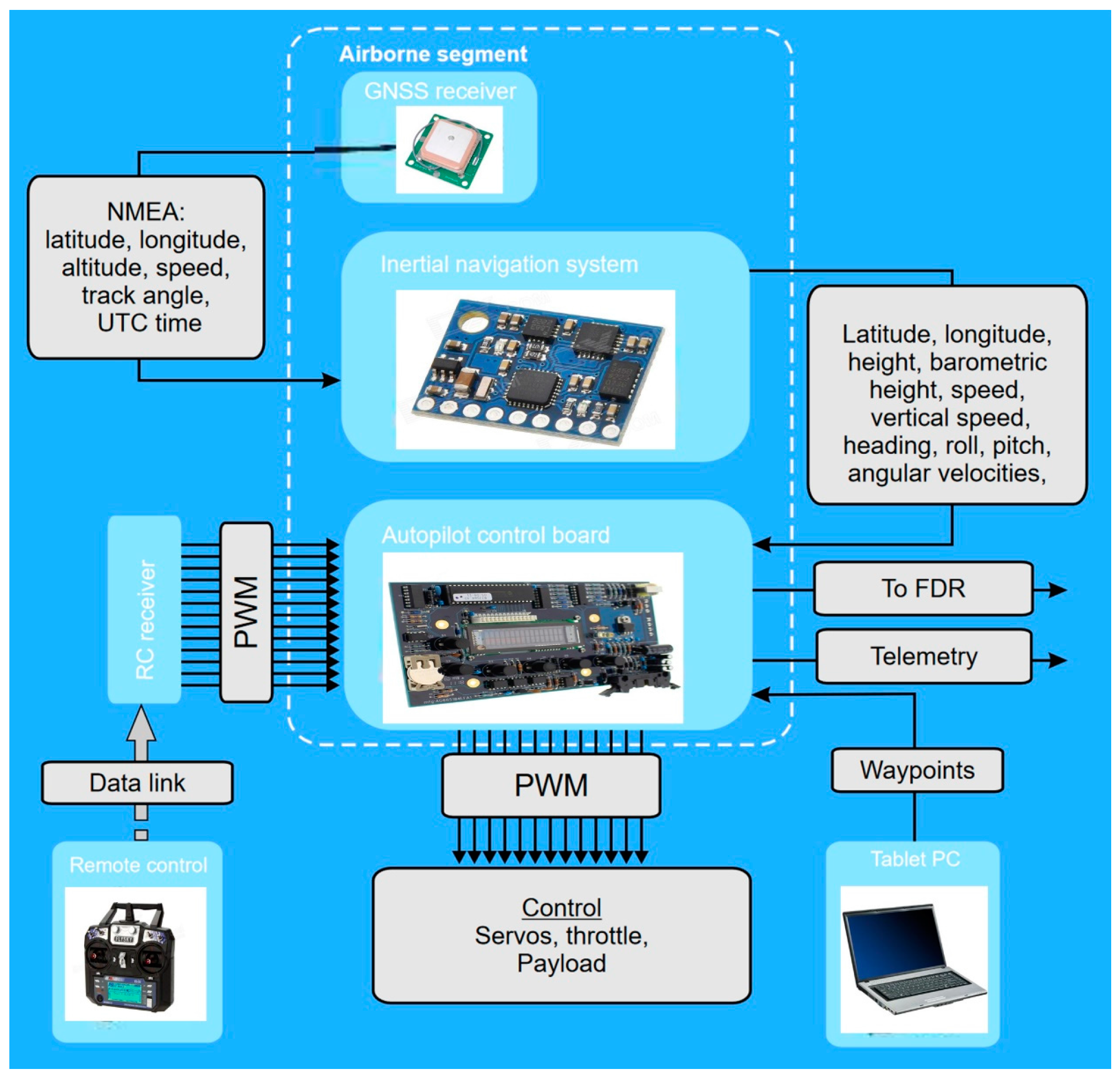
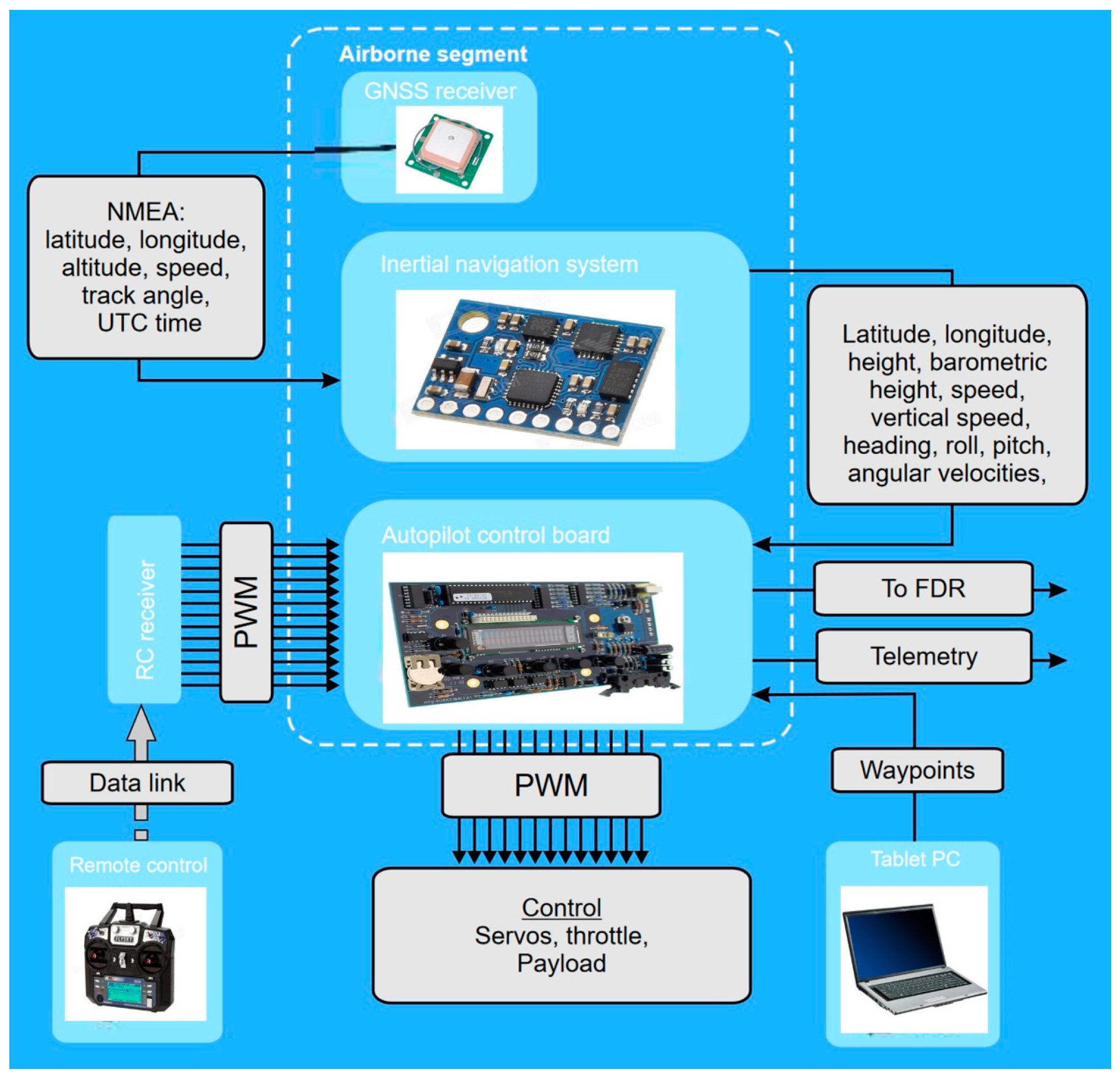
3.5. Flight Control
3.6. Payloads and Data Processing
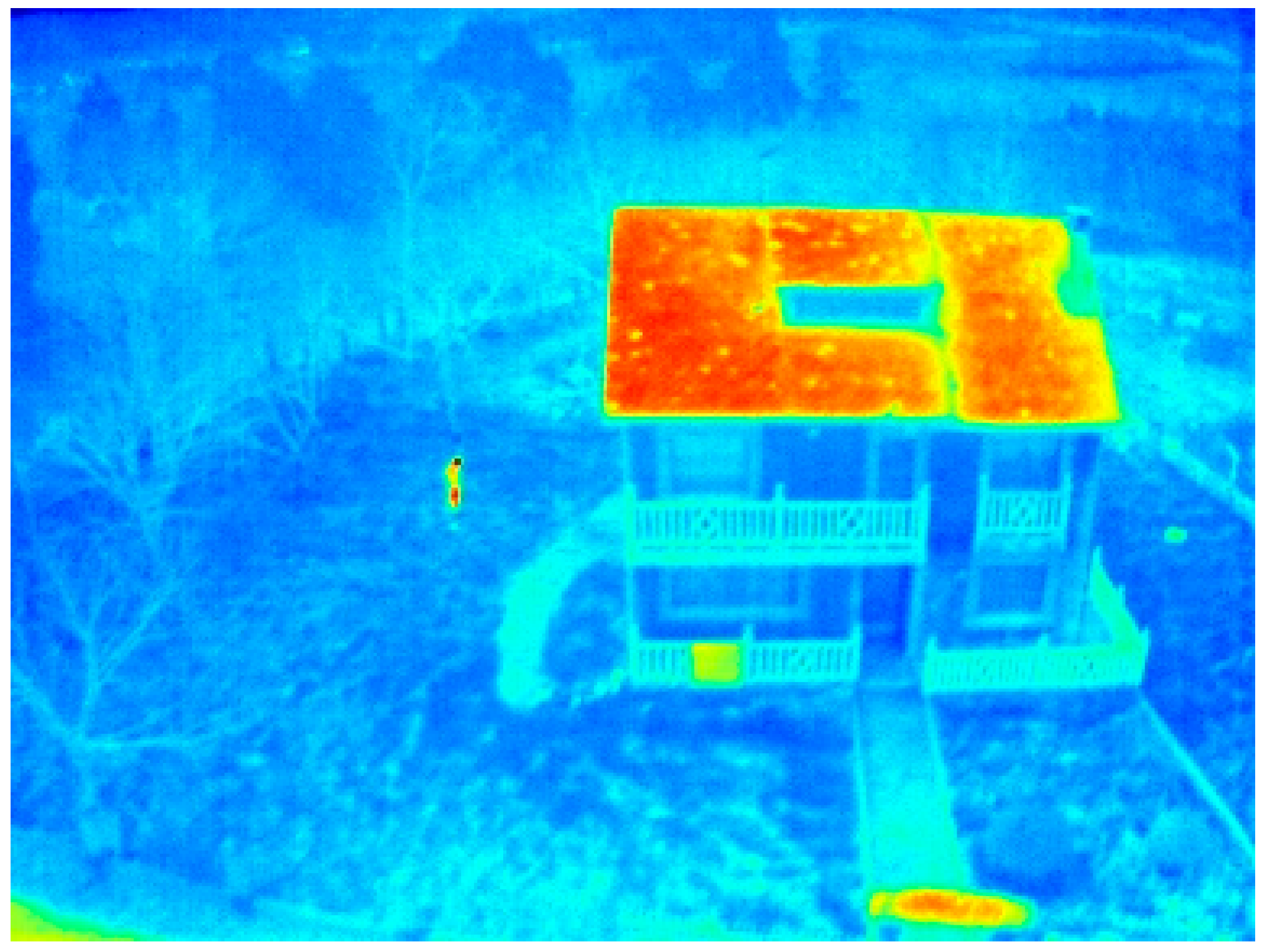
3.6.1. Remote Sensing
3.6.2. Spraying Systems for Precision Agriculture.
3.6.3. Logistics Systems
4. Regulations
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chiesa, S.; Fioriti, M.; Fusaro, R. Male UAV and its systems as a basis of future definitions. Aircr. Eng. Aerosp. Technol. 2016, 88, 771–782. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E. The international GNSS service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Gendt, G. The international GPS service: Celebrating the 10th anniversary and looking to the next decade. Adv. Space Res. 2005, 36, 320–326. [Google Scholar] [CrossRef]
- Sukkarieh, S.; Nebot, E.M.; Durrant-Whyte, H.F. A high integrity IMU/GPS navigation loop for autonomous land vehicle applications. IEEE Trans. Robot. Autom. 1999, 15, 572–578. [Google Scholar] [CrossRef]
- Mirzaei, F.M.; Roumeliotis, S.I. A Kalman filter-based algorithm for IMU-camera calibration: Observability analysis and performance evaluation. IEEE Trans. Robot. 2008, 24, 1143–1156. [Google Scholar] [CrossRef]
- Wendel, J.; Meister, O.; Schlaile, C.; Trommer, G.F. An integrated GPS/MEMS-IMU navigation system for an autonomous helicopter. Aerosp. Sci. Technol. 2006, 10, 527–533. [Google Scholar] [CrossRef]
- Feliz, R.; Zalama, E.; García-Bermejo, J.G. Pedestrian tracking using inertial sensors. J. Phys. Agents 2009, 3, 35–42. [Google Scholar]
- Herissé, B.; Hamel, T.; Mahony, R.; Russotto, F.X. Landing a VTOL unmanned aerial vehicle on a moving platform using optical flown. IEEE Trans. Robot. 2012, 28, 77–89. [Google Scholar] [CrossRef]
- Filgueira, A.; González-Jorge, H.; Lagüela, S.; Díaz-Vilariño, L.; Arias, P. Quantifying the influence of rain in LiDAR performance. Measurement 2017, 95, 143–148. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point clouds: LiDAR versus 3D vision. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar] [CrossRef]
- Chan, Y.K.; Koo, V.C. An introduction to synthetic aperture radar (SAR). Prog. Electromagn. Res. B 2008, 3, 27–60. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Meng, P.; Wu, J.; Schwager, K.L.; Zhao, F.; Dennison, P.E.; Cook, B.C.; Brewster, K.; Green, T.M.; Serbin, S.P. Using high spatial resolution satellite imagery to map forest burn severity across spatial scales in a Pine Barrens ecosystem. Remote Sens. Environ. 2017, 191, 95–109. [Google Scholar] [CrossRef]
- Luo, X.; Wang, M.; Dai, G.; Song, Z. Constellation design for earth observation based on the characteristics of the satellite ground track. Adv. Space Res. 2017, 59, 1740–1750. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Ozesmi, S.L.; Bauer, M.E. Satellite remote sensing of wetlands. Wetl. Ecol. Manag. 2002, 10, 381–402. [Google Scholar] [CrossRef]
- Scarpa, F. Unmanned aerial vehicles. In Aircraft Engineering and Aerospace Technology; Emerald Group Publishing Limited: Bingley, UK, 2001; Volume 73. [Google Scholar]
- Everaerts, J. The use of unmanned aerial vehicles (UAVs) for remote sensing and mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1187–1192. [Google Scholar]
- Gupte, S.; Mohandas, P.I.T.; Conrad, J.M. A survey of quadrotor unmanned aerial vehicles. In Proceedings of the IEEE Southeaston, Orlando, FL, USA, 15–18 March 2012; pp. 1–6. [Google Scholar]
- Ollero, A.; Merino, L. Control and perception techniques for aerial robotics. Annu. Rev. Control. 2004, 28, 167–178. [Google Scholar] [CrossRef]
- Szantoi, Z.; Smith, S.E.; Strona, G.; Koh, L.P.; Wich, S.A. Mapping orangutan habitat and agricultural areas using Landsat OLI imagery augmented with unmanned aircraft system aerial photography. Int. J. Remote Sens. 2017, 38, 2231–2245. [Google Scholar] [CrossRef]
- Blon, J.D. Unmanned Aerial Systems: A Historical Perspective; Combat Studies Institute Press: Fort Leavenworth, KS, USA, 2010; Available online: http://usacac.army.mil/cac2/cgsc/carl/download/csipubs/OP37.pdf (accessed on 1 February 2017).
- Keane, J.F.; Carr, S.S. A brief history of early unmanned aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. Available online: http://www.jhuapl.edu/techdigest/TD/td3203/32_03-Keane.pdf (accessed on 1 February 2017).
- Microdrones. Available online: https://www.microdrones.com/en/team/our-story/ (accessed on 1 February 2017).
- Parrot Sensefly eBee. Available online: https://www.sensefly.com/drones/ebee.html (accessed on 1 February 2017).
- Drone Classification. Available online: http://www.rohde-schwarz-usa.com/rs/324-UVH-477/images/Drone_Monitoring_Whitepaper.pdf (accessed on 1 February 2017).
- Dalamagkidis, K. Classification of UAVs. In Handbook of Unmanned Aerial Vehicles; Springer: Houten, The Netherlands, 2014; pp. 83–91. [Google Scholar]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- DJI Inspire 2. Available online: http://www.dji.com/es/inspire-2 (accessed on 1 February 2017).
- DJI Phantom 4. Available online: https://www.dji.com/es/phantom-4 (accessed on 1 February 2017).
- DJI S1000. Available online: http://www.dji.com/es/spreading-wings-s1000-plus (accessed on 1 February 2017).
- Mikrokopter Okto XL. Available online: http://wiki.mikrokopter.de/en/MK-OktoXL (accessed on 1 February 2017).
- UAV Instruments Ons 2500. Available online: http://www.uav-instruments.com/ons-2500/ (accessed on 1 February 2017).
- UAV Instruments Cies 2000. Available online: http://www.uav-instruments.com/cies-2000/ (accessed on 1 February 2017).
- Erle-Copter. Available online: http://erlerobotics.com/blog/erle-copter/ (accessed on 1 February 2017).
- Aibotix X6. Available online: https://www.aibotix.com/ (accessed on 1 February 2017).
- Riegl Ricopter. Available online: http://riegl.com/products/unmanned-scanning/riegl-ricopter (accessed on 1 February 2017).
- 3DR Solo Drone. Available online: https://3dr.com/solo-drone/ (accessed on 1 February 2017).
- Walkera QT X800. Available online: http://www.walkeraonline.com/walkera-qr-x800-gps-quadcopter.html (accessed on 1 February 2017).
- Elimco E300. Available online: http://www.elimco.com/eng/p_UAV-E300_24.html (accessed on 1 February 2017).
- Drone Dynamics Sky Eye. Available online: http://www.dronedynamics.com/skyeye-sentinel-x4/ (accessed on 1 February 2017).
- AscTec Falcon 8. Available online: http://www.asctec.de/en/asctec-professional-uav/intel-falcon-8-plus/ (accessed on 1 February 2017).
- MMC F6. Available online: http://en.mmcuav.com/ProductsSt/197.html (accessed on 1 February 2017).
- MMC A6 Plus. Available online: http://en.mmcuav.com/ProductsSt/199.html (accessed on 1 February 2017).
- Microdrones MD4 3000. Available online: https://www.microdrones.com/en/products/md4-3000/ (accessed on 1 February 2017).
- Microdrones MD4 1000. Available online: https://www.microdrones.com/en/mdsolutions/mdmapper1000dg/ (accessed on 1 February 2017).
- Microdrones MD4 200. Available online: https://www.microdrones.com/en/mdsolutions/mdmapper200/ (accessed on 1 February 2017).
- Quaternium Spidex Pro. Available online: http://www.quaternium.com/portfolio/spidex-pro-uav/ (accessed on 1 February 2017).
- Quaternium Hybrix. Available online: http://www.quaternium.com/portfolio/hybrix-uav/ (accessed on 1 February 2017).
- Kumar, V.; Michael, N. Opportunities and challenges with autonomous micro aerial vehicles. Robot. Res. 2016, 100, 41–58. [Google Scholar]
- Tripolitsotis, A.; Prokas, N.; Kyritsis, S.; Dollas, A.; Papaefstathiou, I.; Partsinevelos, P. Dronesourcing: A modular, expandable multi-sensor UAV platform for combined, real-time environmental monitoring. Int. J. Remote Sens. 2017, 38, 2757–2770. [Google Scholar] [CrossRef]
- Anemaat, W.A.J.; Schuurman, M.; Liu, W.; Karwas, A. Aerodynamic design, analysis and testing of propellers for small unmanned aerial vehicles. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 7–10 January 2017. [Google Scholar]
- Patel, Y.; Gaurav, A.; Srinivas, K.; Singh, Y. A review on design and analysis of the propeller used in UAV. Int. J. Adv. Prod. Ind. Eng. 2017, 605, 20–23. [Google Scholar]
- Lizuka, K.; Uzuhashi, H.; Kano, M. Microcomputer control for sensorless brushless motor. IEEE Trans. Ind. Appl. 1985, IA-21, 595–601. [Google Scholar]
- Shen, J.X.; Iwasaki, S. Sensorless control of ultrahigh-speed PM brushless motor using PLL and third harmonic back EMF. IEEE Trans. Ind. Appl. 2006, 53, 421–428. [Google Scholar] [CrossRef]
- Dudek, M.; Tomczyk, P.; Wygonik, P.; Korkosz, M.; Bogusz, P.; Lis, B. Hybrid fuel cell–battery system as a main power unit for small unmanned aerial vehicles (UAV). Int. J. Electrochem. Sci. 2013, 8, 8442–8463. [Google Scholar]
- Shiau, J.K.; Ma, D.M.; Yang, P.Y.; Wang, G.F.; Gong, J.H. Design of solar power management system for an experimental UAV. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 11071094. [Google Scholar] [CrossRef]
- Abdilla, A.; Richards, A.; Burrow, S. Power and endurance modelling of battery-powered rotorcraft. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Criado, R.M.; Rubio, F. Autonomous path tracking control design for a commercial quadcopter. IFAC Workshop Adv. Control Navig. Auton. Aerosp. Veh. 2015, 48, 73–78. [Google Scholar]
- Lienard, J.; Vogs, A.; Gatziolis, D.; Strigul, N. Embedded, real-time UAV control for improved, image based 3D scene reconstruction. Measurement 2016, 81, 264–269. [Google Scholar] [CrossRef]
- Varga, M.; Zufferey, J.C.; Heitz, G M.H.M.; Floreano, D. Evaluation of control strategies for fixed-wing drones following slow-moving ground agents. Robot. Auton. Syst. 2015, 72, 285–294. [Google Scholar] [CrossRef]
- Pixhawk Autopilot. Available online: http://www.pixhawk.org/ (accessed on 1 February 2017).
- Pixhawk 2 Autopilot. Available online: http://www.proficnc.com/ (accessed on 1 February 2017).
- Pixracer Autopilot. Available online: http://px4.io/docs/pixracer/ (accessed on 1 February 2017).
- Navio + Autopilot. Available online: https://emlid.com/navio-plus/ (accessed on 1 February 2017).
- Navio 2 Autopilot. Available online: https://emlid.com/shop/navio2/ (accessed on 1 February 2017).
- Parrot Bebop Autopilot. Available online: http://ardupilot.org/copter/docs/parrot-bebop-autopilot.html (accessed on 1 February 2017).
- Intel Aero Autopilot. Available online: http://ardupilot.org/copter/docs/common-intel-aero-overview.html (accessed on 1 February 2017).
- Qualcomm Snapdragon Flight Kit. Available online: http://ardupilot.org/copter/docs/common-qualcomm-snapdragon-flight-kit.html (accessed on 1 February 2017).
- Zongjian, L. UAV for mapping—Low altitude photogrammetric survey. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1183–1186. [Google Scholar]
- Xiang, H.; Tian, L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform. Biosyst. Eng. 2011, 108, 104–113. [Google Scholar] [CrossRef]
- Niethammer, U.; Rothmund, S.; James, M.R.; Travelletti, J.; Joswig, M. UAV-based remote sensing of landslides. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 496–501. [Google Scholar]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Bendea, H.; Boccardo, P.; Dequal, S.; Giulio Tonolo, F.; Marenchino, D.; Piras, M. Low cost UAV for post-disaster assessment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1373–1380. [Google Scholar]
- Smith, S.; Szantoi, Z.; Perry, J.; Percival, F.; Evers, B. Design considerations for remote sensing payloads on inexpensive unmanned autonomous aerial vehicles. Surv. Land Inf. Sci. 2010, 70, 131–137. [Google Scholar]
- Xing, M.; Jiang, X.; Wu, R.; Zhou, F.; Bao, Z. Motion compensation for UAV SAR based on raw radar data. IEEE Trans. Geosci. 2009, 47, 2870–2883. [Google Scholar] [CrossRef]
- Essen, H.; Johannes, W.; Stanko, S.; Sommer, R.; Wahlen, A.; Wilcke, J. High resolution W-band UAV SAR. In Proceedings of the IEEE International Geoscience and Remote Sensing, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Wallace, L. Assessing the stability of canopy maps produced from UAV-LiDAR data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2013. [Google Scholar]
- Salamí, E.; Barrad, C.; Pastor, E. UAV flight experiments applied to the remote sensing of vegetated áreas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef]
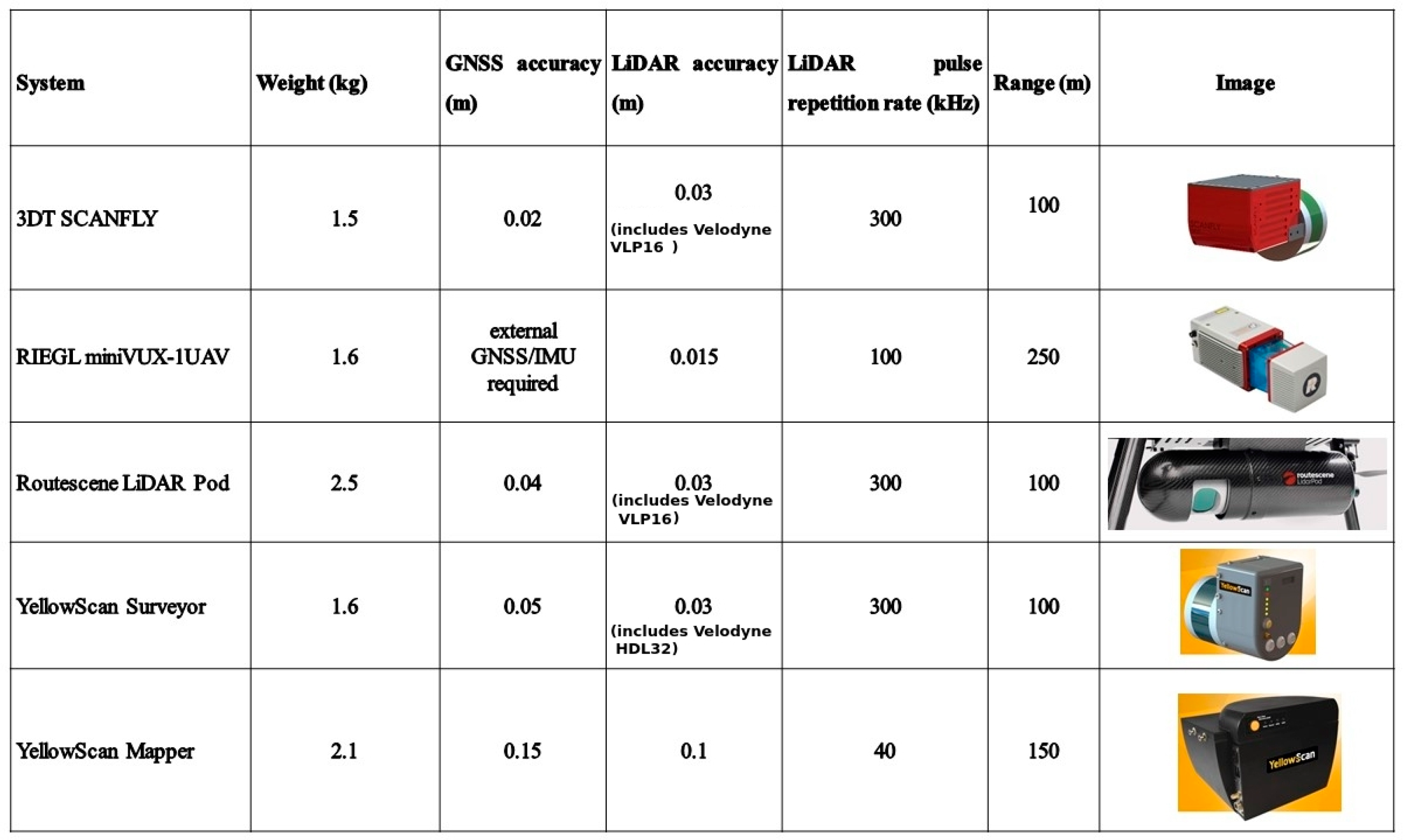
- 3DT Scanfly. Available online: http://www.3dtarget.it/eu/en/uav/uav-products/lidar/velodyne-vlp-16-puck-848-1632-2050-detail.html (accessed on 1 February 2017).
- Riegl MiniVUX-1UAV. Available online: http://www.riegl.com/products/unmanned-scanning/new-riegl-minivux-1uav/ (accessed on 1 February 2017).
- Routescene LiDAR Pod. Available online: http://www.routescene.com/products/product/uav-lidarpod/ (accessed on 1 February 2017).
- YellowScan Surveyor. Available online: http://www.yellowscan.fr/products/yellowscan-surveyor (accessed on 1 February 2017).
- YellowScan Mapper. Available online: http://www.yellowscan.fr/products/yellowscan-mapper (accessed on 1 February 2017).
- Faical, B.; Costa, F.G.; Pessin, G.; Ueyama, J.; Freitas, H.; Colombo, A.; Fini, P.H.; Villas, L.; Osório, F.S.; Vargas, P.A.; et al. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Arch. 2014, 60, 393–404. [Google Scholar] [CrossRef]
- Pederi, Y.A.; Cheporniuk, H.S. Unmanned aerial vehicles and new technological methods of monitoring and crop protection in precision agriculture. Actual problems of unmanned aerial vehicles developments. In Proceedings of the IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kiev, Ukraine, 13–15 October 2015. [Google Scholar]
- Ehmke, T. Unmanned aerial systems for field scouting and spraying. Crops Soils 2013, 46, 4–9. [Google Scholar] [CrossRef]
- Mckinnon, A.C. The possible impact of 3D printing and drones on last-mile logistics: An exploratory study. Built Environ. 2016, 42, 617–629. [Google Scholar] [CrossRef]
- Cordova, F.; Olivares, V. Design of drone fleet management model in a production system of customized products. In Proceedings of the 6th International Conference on Computers Communications and Control, Oradea, Romania, 10–14 May 2016. [Google Scholar]
- Tavana, M.; Khalili-Damghani, K.; Santos-Arteaga, F.J.; Zandi, M.H. Drone shipping versus truck delivery in a cross-docking system with multiple fletes and products. Expert Syst. Appl. 2017, 72, 93–107. [Google Scholar] [CrossRef]
- DHL Drone Logistics. Available online: http://www.dhl.com/content/dam/downloads/g0/about_us/logistics_insights/DHL_TrendReport_UAV.pdf (accessed on 1 February 2017).
- Ambulance Drone. Available online: https://www.tudelft.nl/en/ide/research/research-labs/applied-labs/ambulance-drone/ (accessed on 1 February 2017).
- EASA. Available online: https://www.easa.europa.eu/ (accessed on 1 February 2017).
- Single European Sky. Available online: http://www.eurocontrol.int/dossiers/single-european-sky (accessed on 1 February 2017).
- Standardized European Rules of the Air. Available online: https://www.eurocontrol.int/sites/default/files/article/content/documents/single-sky/mandates/20090814-sera-parta-ec-mandate.pdf (accessed on 1 February 2017).
- Aviation Authorities. Available online: https://en.wikipedia.org/wiki/List_of_civil_aviation_authorities (accessed on 1 February 2017).
- Federal Aviation Administration. Available online: www.faa.gov (accessed on 1 February 2017).
- Agência Nacional de Aviação Civil. Available online: www.anac.gov.br (accessed on 1 February 2017).
- Transport Canada. Available online: www.tc.gc.ca/eng/civilaviation/menu.htm (accessed on 1 February 2017).
- USA Regulation for UAS. Available online: https://www.faa.gov/uas/ (accessed on 1 February 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Autopilot | Processor | Sensors | Interfaces |
|---|---|---|---|
| Pixhawk Weight 38 g Size 50 × 81.5 mm | 32-bit ARM Cortex M4 core with FPU 168 Mhz/256 KB RAM/2 MB Flash. 32-bit failsafe co-processor. | MPU6000 as main accel and gyro. ST Micro 16-bit gyroscope. ST Micro 14-bit accelerometer/compass (magnetometer). MEAS barometer. | 5x UART serial ports, 1 high-power capable, 2 with HW flow control Spektrum DSM/DSM2/DSM-X Satellite input. Futaba S.BUS input (output not yet implemented). PPM sum signal. RSSI (PWM or voltage) input. I2C, SPI, 2x CAN, USB. 3.3 V and 6.6 V ADC inputs. |
| Pixhawk2 (TheCube) | 32-bit ARM. Cortex M4 core with FPU. 168 Mhz/256 KB RAM/2 MB Flash. 32-bit failsafe co-processor. | Three redundant IMUs (accels, gyros and compass). InvenSense MPU9250, ICM20948 and/or ICM20648 as first and third IMU (accel and gyro). ST Micro L3GD20 + LSM303D or InvenSense ICM2076xx as backup IMU (accel and gyro). Two redundant MS5611 barometers. | 14x PWM servo outputs (8 from IO, 6 from FMU). S.Bus servo output. R/C inputs for CPPM, Spektrum/DSM and S.Bus. Analogue/PWM RSSI input. 5x general purpose serial ports, 2 with full flow control. 2x I2C ports. SPI port (un-buffered, for short cables only not recommended for use). 2x CAN Bus interface. 3x Analogue inputs (3.3 V and 6.6 V). High-powered piezo buzzer driver (on expansion board). High-power RGB LED (I2C driver compatible connected externally only). Safety switch/LED. Optional carrier board for Intel Edison. |
| Pixracer Weight— Size 36 × 36 mm | MCU—STM32F427VIT6 rev.3. Ultra low noise LDOs for sensors and FMU FRAM—FM25V02-G | Gyro/Accelerometer: Invensense MPU9250 Accel/Gyro/Mag (4 KHz). Gyro/Accelerometer: Invensense ICM-20608 Accel/Gyro (4 KHz). Barometer: MS5611. Compass: Honeywell HMC5983 magnetometer with temperature compensation. | Wifi: ESP-01 802.11bgn Flashed with MavESP8266. MicroSD card reader. Micro USB. RGB LED. GPS (serial + I2C). TELEM1/TELEM2. Wifi serial. FrSky Telemetry serial. Dronecode Debug connector (serial + SWD). Connectors: GPS + I2C, RC-IN, PPM-IN, RSSI, SBus-IN, Spektrum-IN, USART3 (TxD, RxD, CTS, RTS), USART2 (TxD, RxD, CTS, RTS), FRSky-IN, FRSky-OUT, CAN, USART8 (TxD, RxD), ESP8266 (full set), SERVO1-SERVO6, USART7 (TxD, RxD), JTAG (SWDIO, SWCLK), POWER-BRICK (VDD, Voltage, Current, GND), BUZZER-LED_BUTTON. |
| Autopilot | Processor | Sensors | Interfaces |
|---|---|---|---|
| Navio+ Weight 12 g (shield) + 54 g (RPi2) Size 55 × 65 mm (shield only) | Raspberry PI 2 900 Mhz quad-core ARM Cortext-A7 CPU 1 GB RAM. | MPU9250 as main accel, gyro and compass. MS5611 barometer. U-Blox M8N GPS. | UART, SPI, I2C. PWM Sum input. Futaba S.BUS input. 13 PWM servo outputs. |
| Navio 2 Weight 23 g (shield) + 54 g (RPi2) Size 55 × 65 mm (shield only) | Raspberry PI 3 1.2 GHz 64-bit quad-core ARMv8 CPU 1 GB RAM | MPU9250 9DOF IMU. LSM9DS1 9DOF IMU. MS5611 Barometer. U-blox M8N. Glonass/GPS/Beidou. RC I/O co-processor. | UART, I2C, ADC for extensions. PWM/S.Bus input. 14 PWM servo outputs. |
| Parrot Bebop Weight 400 g (with hull) Size 33 × 38 mm | Parrot P7 dual-core CPU Cortex 9 with quad core GPU 8 GB flash | MPU6050 for accelerometers and gyroscope (I2C). AKM 8963 compass. MS5607 barometer. Furuno GN-87F GPS. Sonar. Optical-flow. HD camera. | 1x UART serial ports. USB. Built-in Wifi. |
| Intel Aero Weight 30 g (without heatsink), 60 g (with heatsink) Size 88 × 63 mm | Intel® Atom™ x7-Z8700. Processor—2.4 GHz burst, quad core, 2 M cache, 64 bit 4 GB RAM LPDDR3-1600—32 GB eMMC | Bosch BMI160 6-Axis IMU. Bosch BMC150 6-axis compass. MS5611 Barometer. | I2C × 2. UART. SPI. CAN. 5 analog inputs. 25 programmable GPIO pins. Wi-Fi (802.11ac). 1 micro HDMI 1.4b. 1 USB 3.0 On-the-Go (OTG) connector. MIPI (CSI-2) 4-lanes + 1 lane connector. microSD memory card slot. M.2 connector 1 lane PCIe for SSD. |
| Qualcomm Snapdragon Flight Kit Weight- Size 68 × 52 mm | CPU: Quad-core 2.26 GHz Krait. DSP: Hexagon DSP (QDSP6 V5A)—801 MHz + 256KL2 (running the flight code). GPU: Qualcomm® Adreno™ 330 GPU. RAM: 2 GB LPDDR3 PoP @931 MHz. Storage: 32 GB eMMC Flash. | MPU: Invensense MPU-9250 9-Axis Sensor, 3 × 3 mm QFN. Barometer: Bosch BMP280 barometric pressure sensor. Optical Flow: Omnivision OV7251 on Sunny Module MD102A-200 Video: Sony IMX135 on Liteon Module 12P1BAD11 (4k@30fps 3840 × 2160 video capture to SD card with H.264 @ 100 Mbits (1080p/60 with parallel FPV), 720p FPV). GPS: Telit Jupiter SE868 V2 module. | Wifi: Qualcomm® VIVE™ 1-stream 802.11n/ac with MU-MIMO Integrated digital core. BT/WiFi: BT 4.0 and 2 G/5 G WiFi via QCA6234. 802.11n, 2 × 2 MIMO with 2 uCOAX connectors on-board for connection to external antenna. uCOAX connector on-board for connection to external GPS patch antenna. CSR SiRFstarV @ 5 Hz via UART One USB 3.0 OTG port (micro-A/B) Micro SD card slot. Gimbal connector (PWB/GND/BLSP). ESC connector (2W UART). I2C. 60-pin high speed Samtec QSH-030-01-L-D-A-K expansion connector. 2x BLSP (BAM Low Speed Peripheral). |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, A.P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. https://doi.org/10.3390/drones1010002
González-Jorge H, Martínez-Sánchez J, Bueno M, Arias AP. Unmanned Aerial Systems for Civil Applications: A Review. Drones. 2017; 1(1):2. https://doi.org/10.3390/drones1010002
Chicago/Turabian StyleGonzález-Jorge, Higinio, Joaquin Martínez-Sánchez, Martín Bueno, and And Pedor Arias. 2017. "Unmanned Aerial Systems for Civil Applications: A Review" Drones 1, no. 1: 2. https://doi.org/10.3390/drones1010002
APA StyleGonzález-Jorge, H., Martínez-Sánchez, J., Bueno, M., & Arias, A. P. (2017). Unmanned Aerial Systems for Civil Applications: A Review. Drones, 1(1), 2. https://doi.org/10.3390/drones1010002