
Integration of Printed PVDF-Based Force Sensors into a Printed Circuit Board Stack †


{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
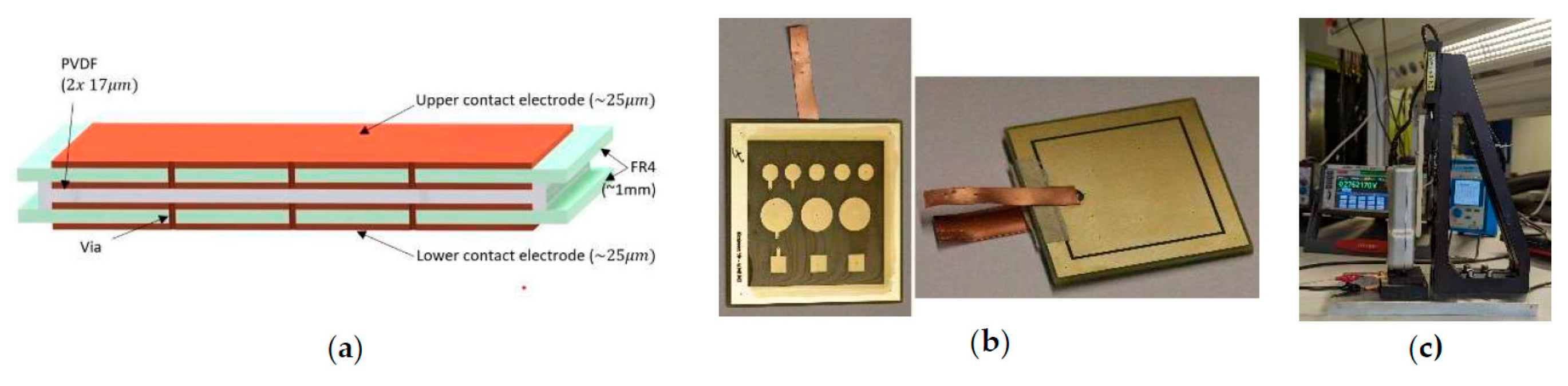
2.1. Fabrication
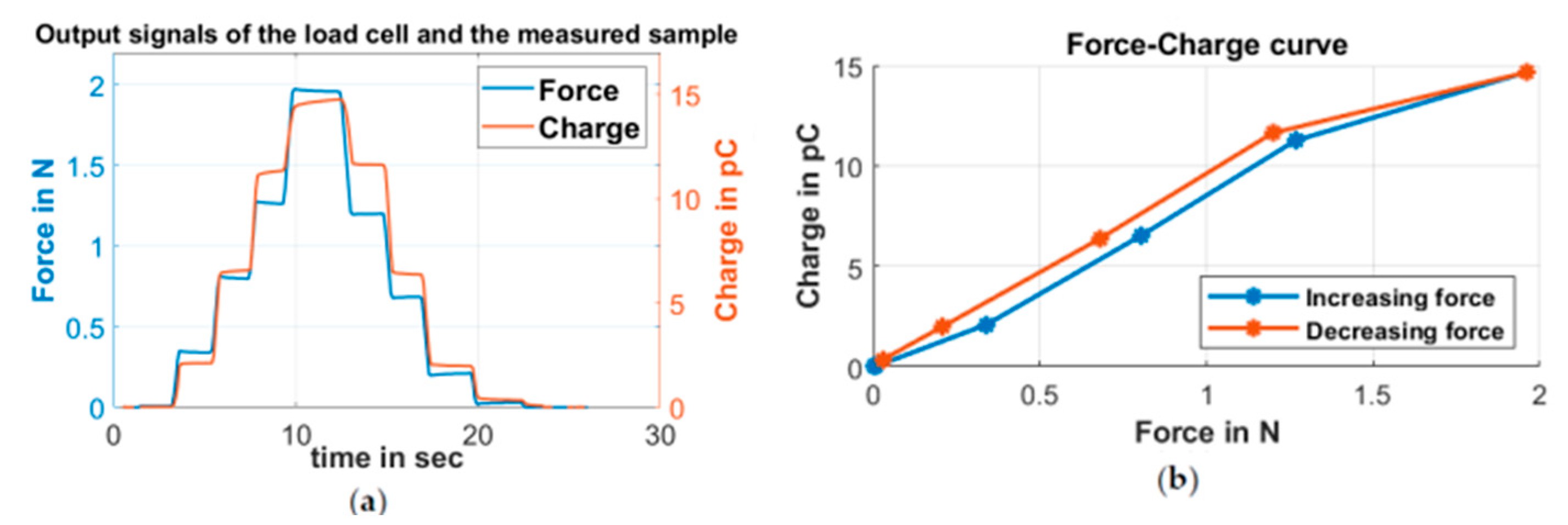
2.2. Evaluation
2.3. Results
3. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schrüfer, E.; Reindl, L.; Zagar, B. Elektrische Messtechnik; Carl Hanser Verlag GmbH & Co. KG: Munich, Germany, 2018; pp. 1–13. ISBN 978-3-446-45654-9. [Google Scholar]
- Enser, H.; Sell, J.K.; Krause, M.; Schatzl-Linder, M.; Strauß, B.; Jakoby, B.; Hilber, W. Concept for Printed Ferroelectric Sensors on Coated Metallic Substrates. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, S.; Hilber, W.; Enser, H.; Jakoby, B. Integration of Printed PVDF-Based Force Sensors into a Printed Circuit Board Stack. Proceedings 2024, 97, 84. https://doi.org/10.3390/proceedings2024097084
Lang S, Hilber W, Enser H, Jakoby B. Integration of Printed PVDF-Based Force Sensors into a Printed Circuit Board Stack. Proceedings. 2024; 97(1):84. https://doi.org/10.3390/proceedings2024097084
Chicago/Turabian StyleLang, Sebastian, Wolfgang Hilber, Herbert Enser, and Bernhard Jakoby. 2024. "Integration of Printed PVDF-Based Force Sensors into a Printed Circuit Board Stack" Proceedings 97, no. 1: 84. https://doi.org/10.3390/proceedings2024097084
APA StyleLang, S., Hilber, W., Enser, H., & Jakoby, B. (2024). Integration of Printed PVDF-Based Force Sensors into a Printed Circuit Board Stack. Proceedings, 97(1), 84. https://doi.org/10.3390/proceedings2024097084