Multi-Objective Optimization Design of a 30 kW Electro-Hydrostatic Actuator †



Abstract
:1. Introduction
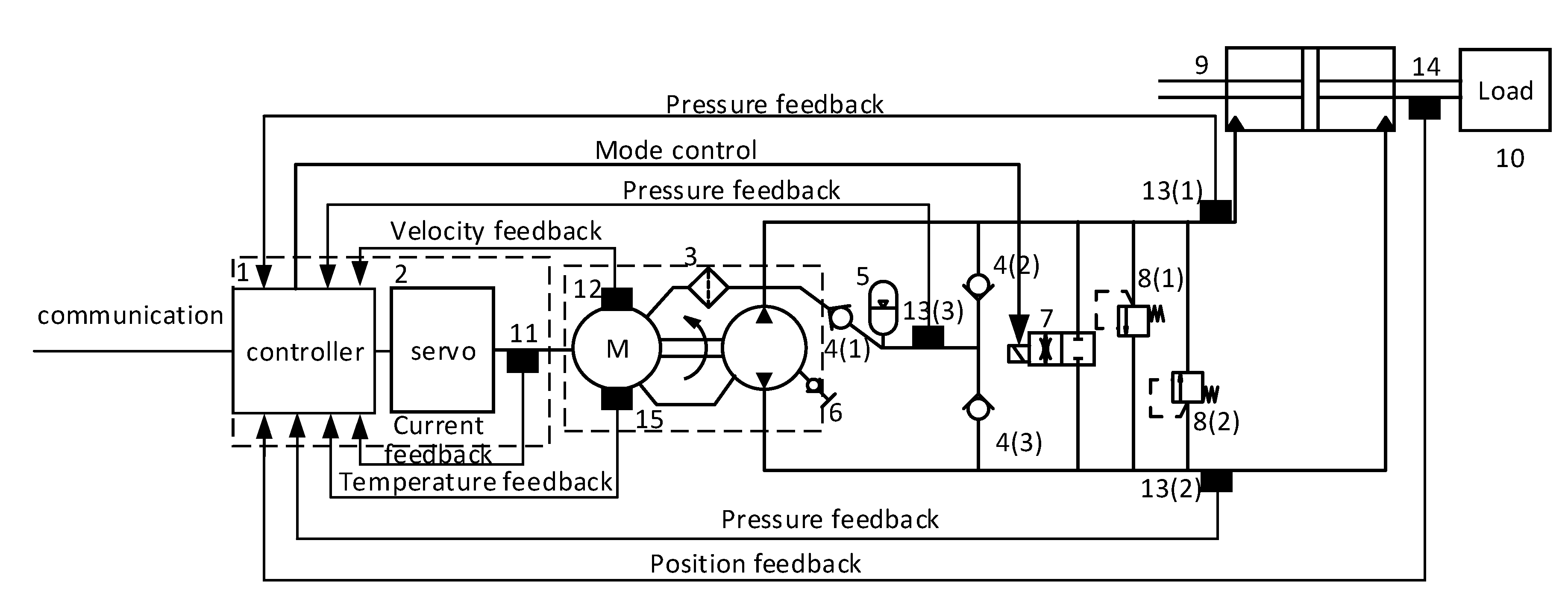
2. The Preliminary Design Task of the 30 kW EHA
3. Evaluation Models for the Objectives and Constraints
3.1. Evaluation Model of the EHA Mass
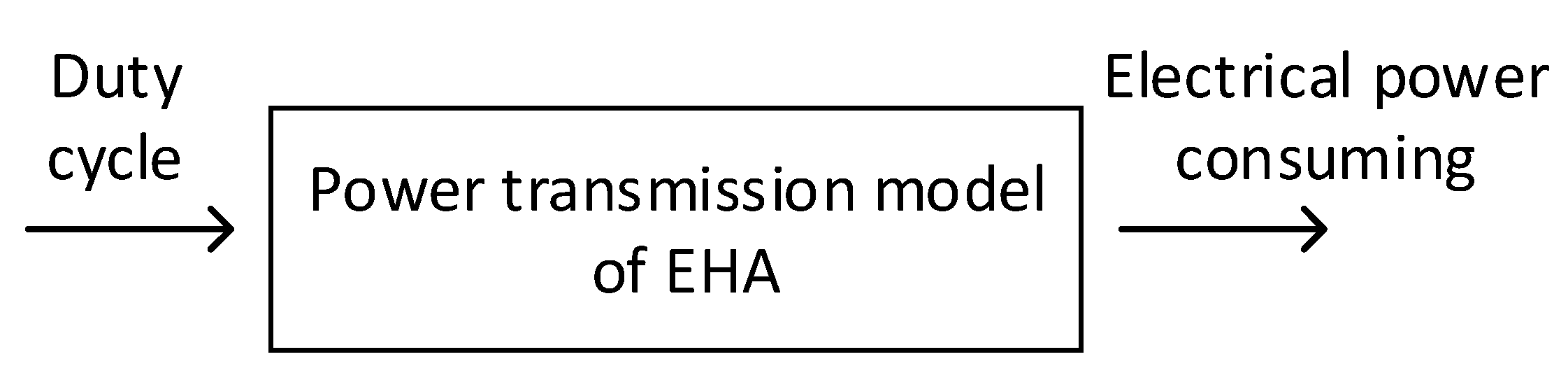
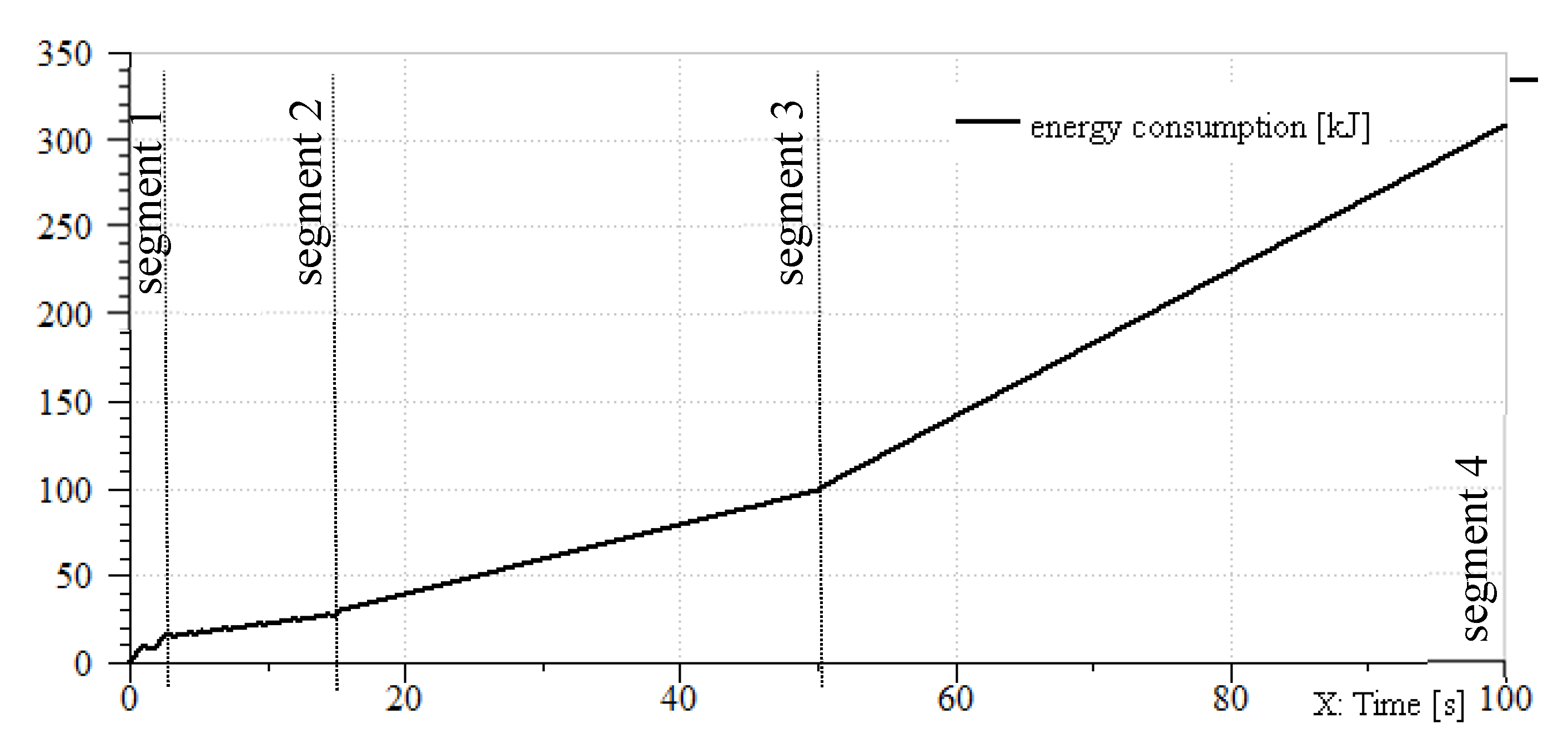
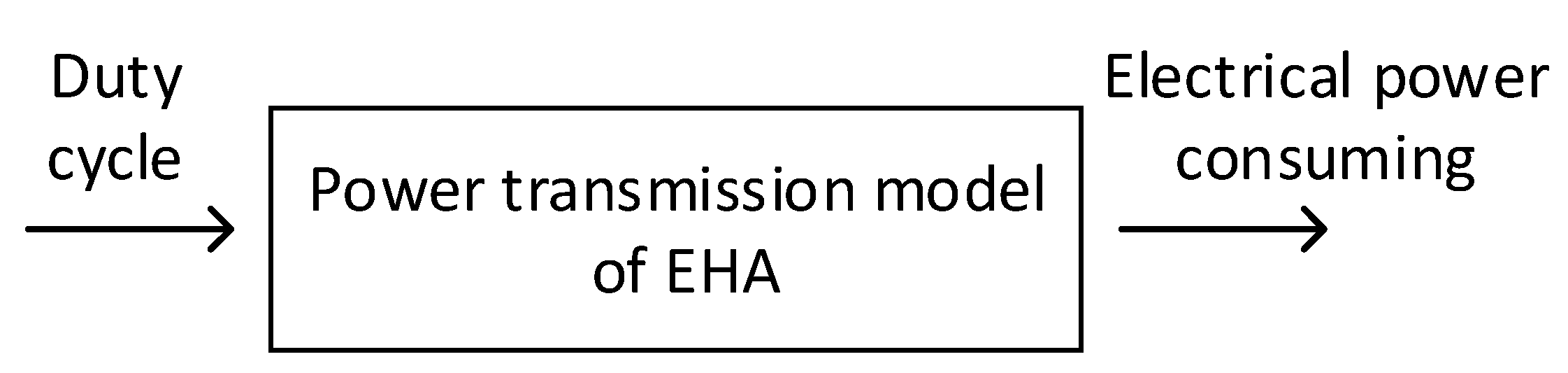
3.2. Evaluation Model of the EHA Efficiency
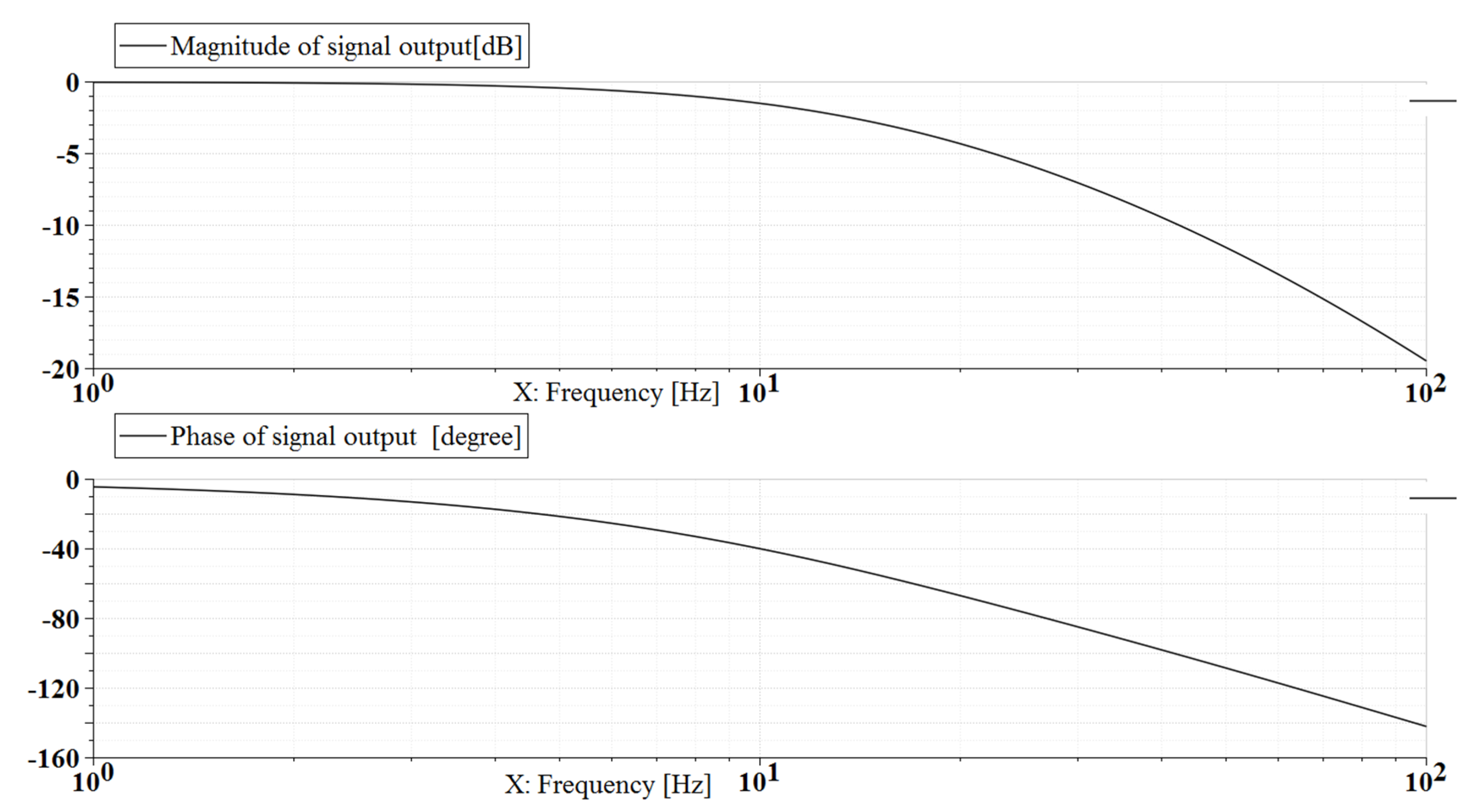
3.3. Evaluation Model of the EHA Bandwidth
3.4. Evaluation Models of the Constraints
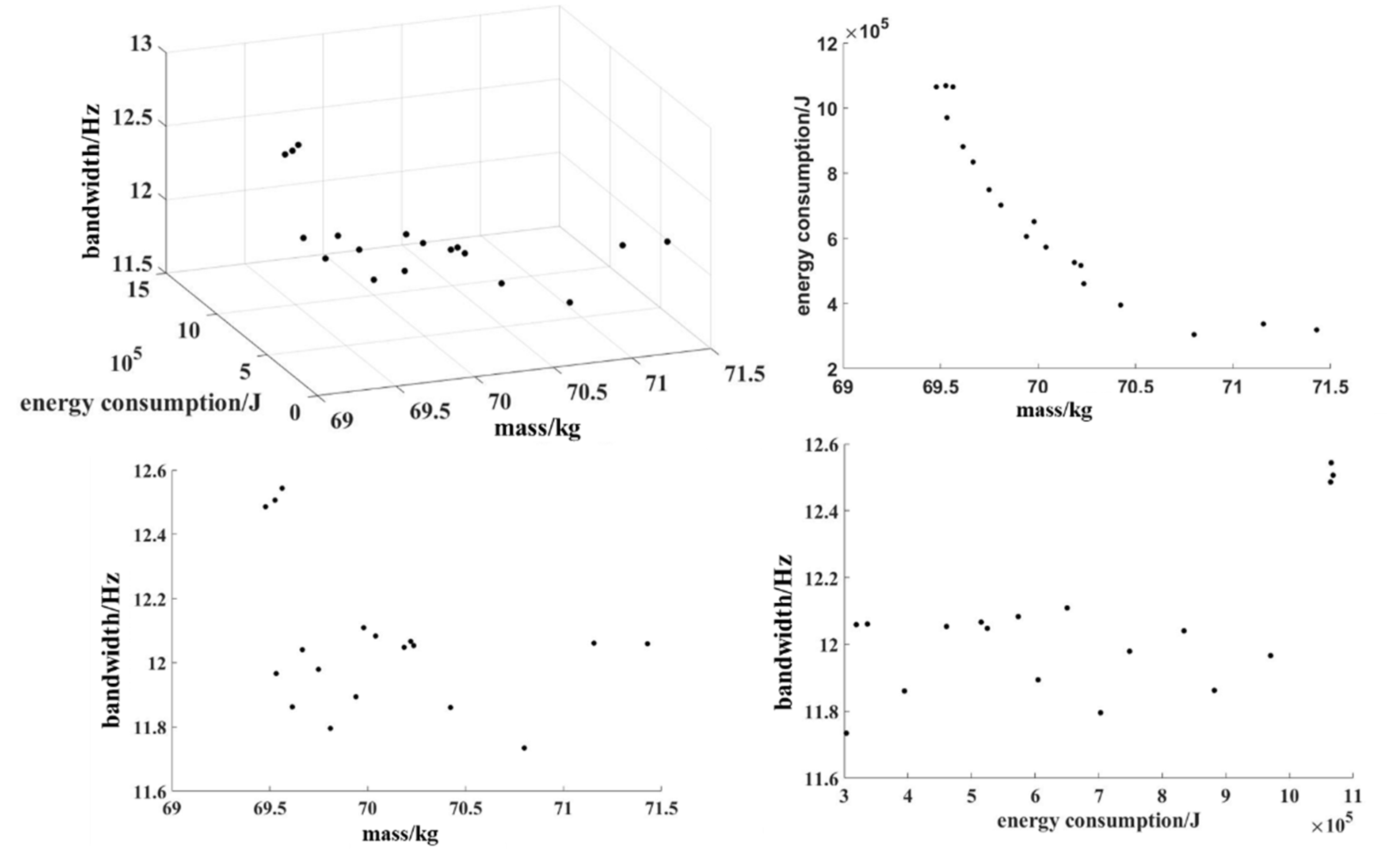
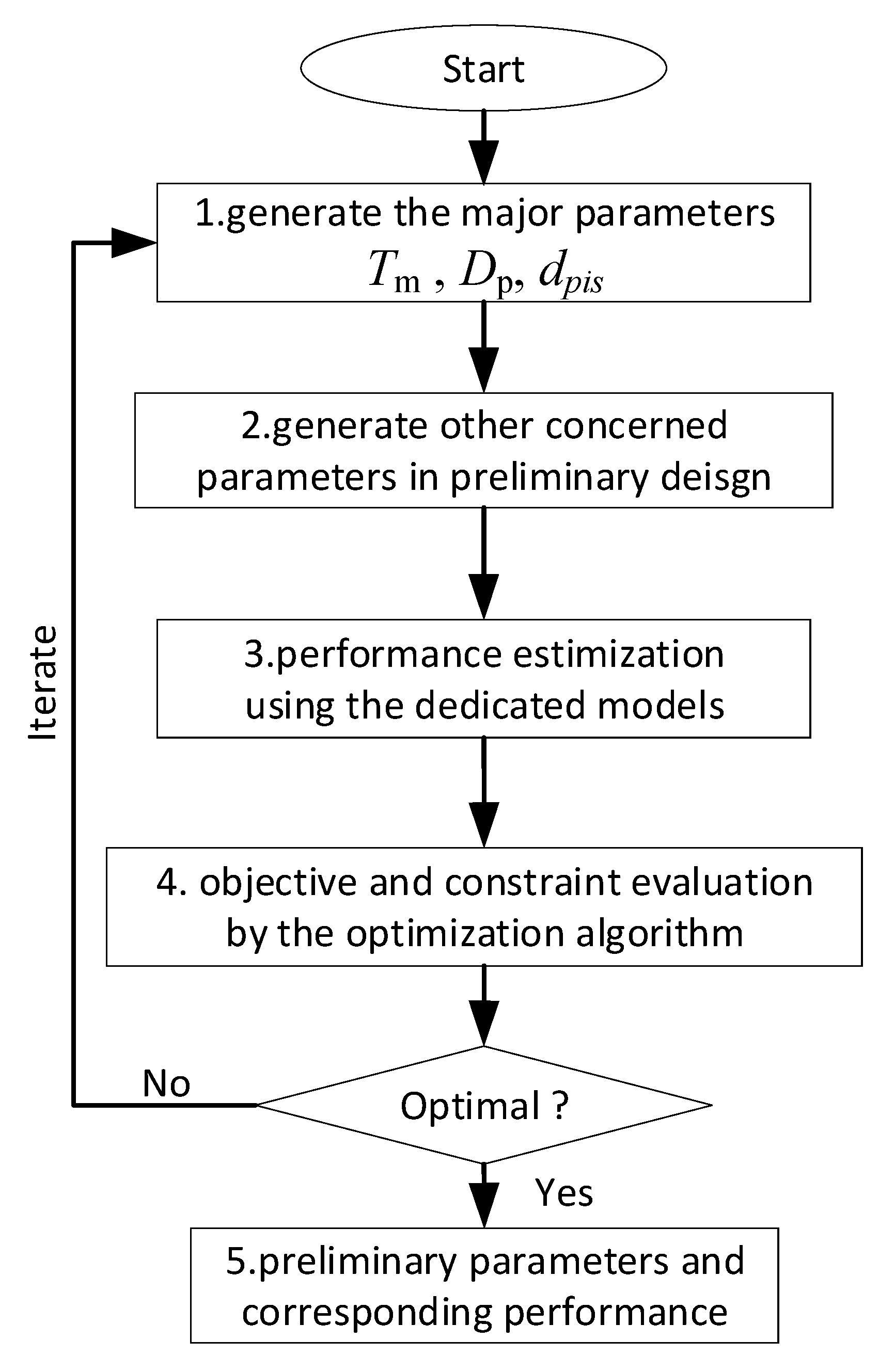
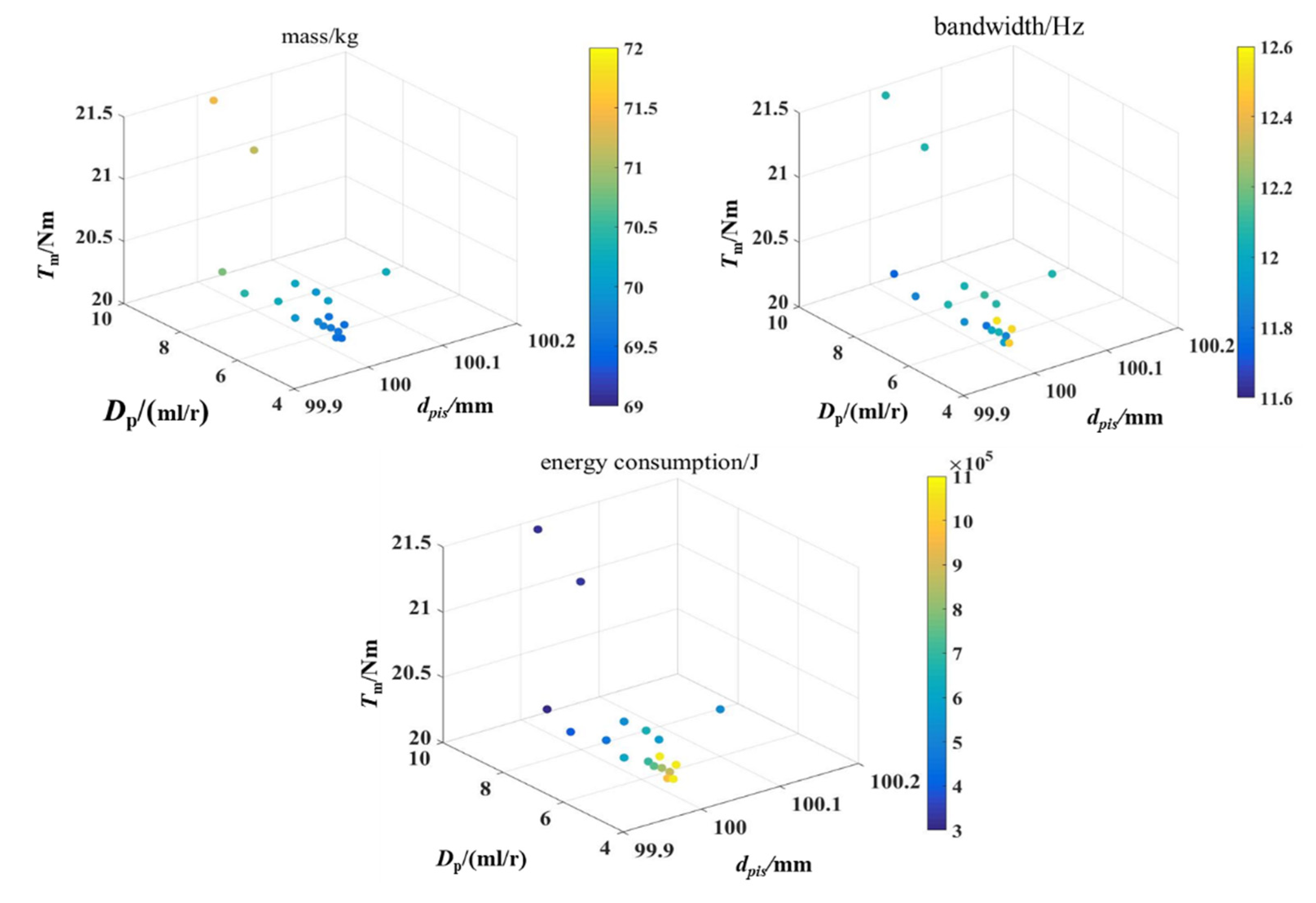
4. Optimization Design Implementation
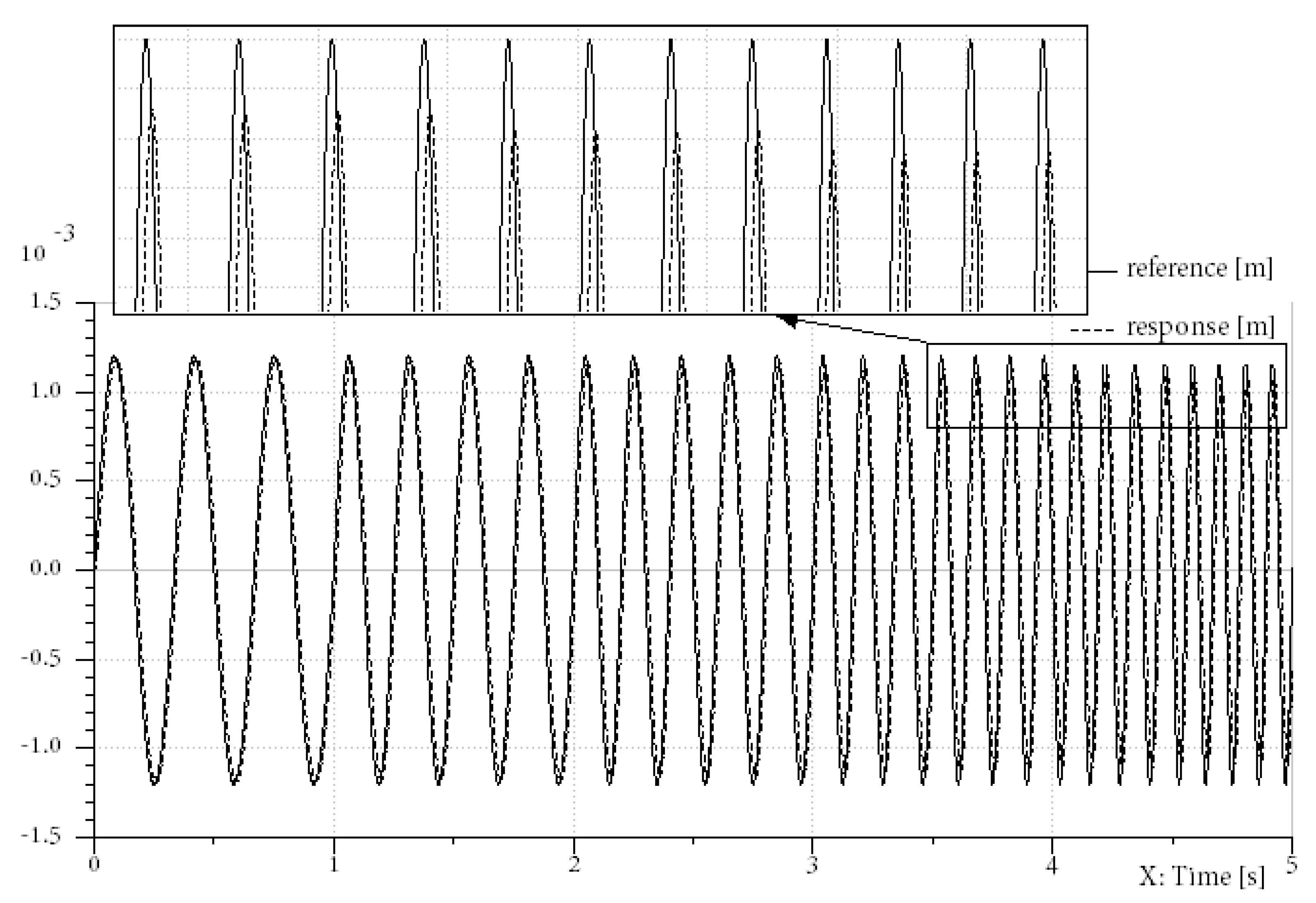
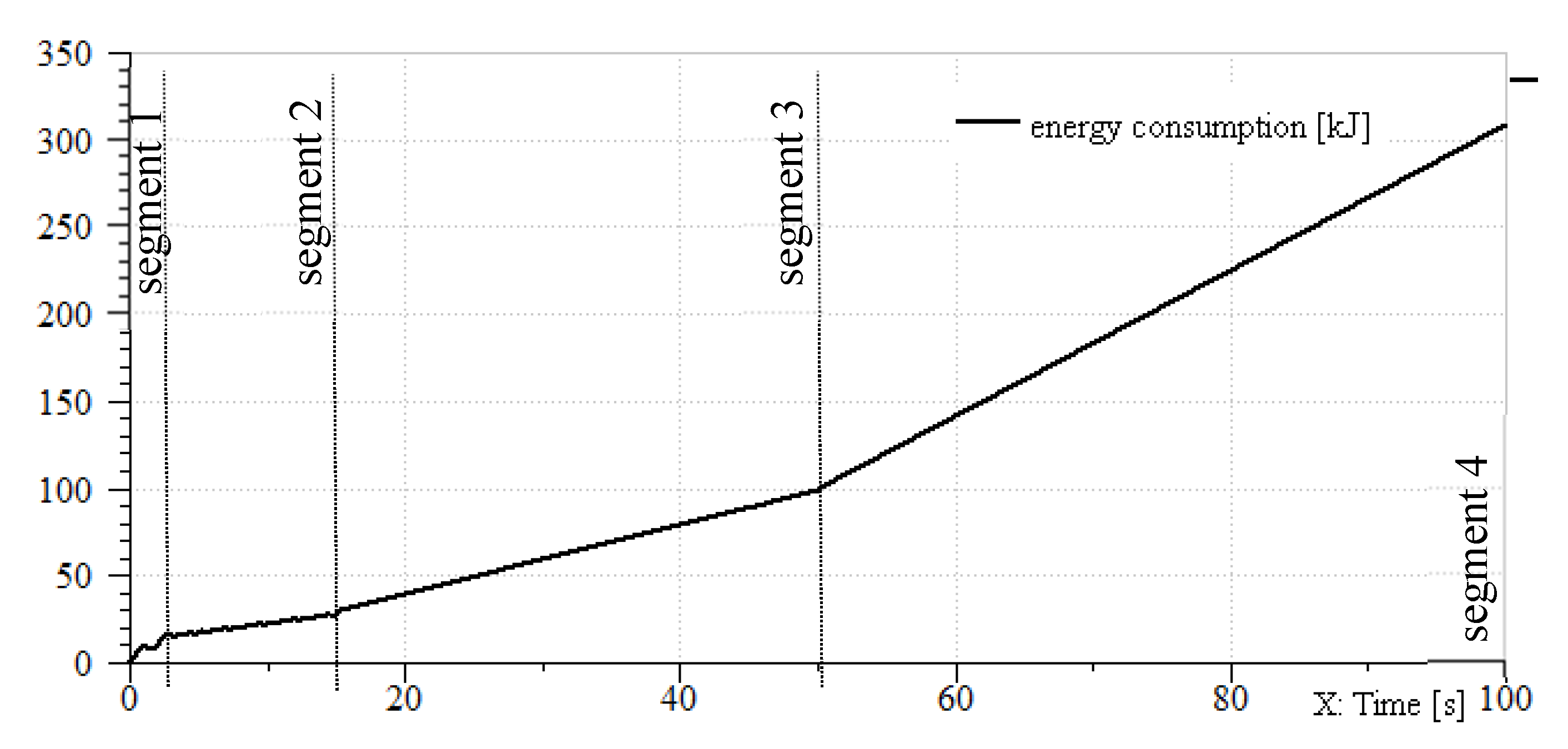
5. Simulation Analysis of the Design Solution
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Budinger, M.; Reysset, A.; Halabi, T.E.; Vasiliu, C.; Maré, J.C. Optimal preliminary design of electromechanical actuators. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 1598–1616. [Google Scholar] [CrossRef]
- Lei, G.; Wang, T.; Zhu, J.; Guo, Y.; Wang, S. System-level design optimization method for electrical drive systems—Robust approach. IEEE Trans. Ind. Electron. 2015, 62, 4702–4713. [Google Scholar] [CrossRef]
- Roos, F. Towards a Methodology for Integrated Design of Mechatronic Servo Systems. Ph.D. Thesis, KTH, Stokholm, Sweden, 2007. [Google Scholar]
- Andersson, J. Multiobjective Optimization in Engineering Design: Applications to Fluid Power Systems. Ph.D. Thesis, Linköpings universitet, Linköping, Sweden, 2001. [Google Scholar]
- Kim, K.C.; Lee, J.; Kim, H.J.; Koo, D.H. Multiobjective optimal design for interior permanent magnet synchronous motor. IEEE Trans. Magn. 2009, 45, 1780–1783. [Google Scholar] [CrossRef]
- Golovanov, D.; Papini, L.; Gerada, D.; Xu, Z.; Gerada, C. Multidomain optimization of high-power-density PM electrical machines for system architecture selection. IEEE Trans. Ind. Electron. 2017, 65, 5302–5312. [Google Scholar] [CrossRef]
- Xue, L.; Wu, S.; Xu, Y.; Ma, D. A simulation-based multi-objective optimization design method for pump-driven electro-hydrostatic actuators. Processes 2019, 7, 274. [Google Scholar] [CrossRef]
- ISO 22072. Aerospace—Electrohydrostatic Actuator (EHA)—Characteristics to be Defined in Procurement Specifications; ISO: Geneva, Switzerland, 2011. [Google Scholar]
- Garrison, M.; Steffan, S. Two-fault tolerant electric actuation systems for space applications. In Proceedings of the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Sacramento, CA, USA, 9–12 July 2006; AIAA: Reston, VA, USA, 2006. [Google Scholar]
- Navarro, R. Performance of an Electro-Hydrostatic Actuator on the F-18 Systems Research Aircraft; NASA Technical Report 1997, NASA/TM-97-206224; NASA: Washington, DC, USA, 1997. [Google Scholar]
- Liscouët, J.; Budinger, M.; Maré, J.C.; Orieux, S. Modelling approach for the simulation-based preliminary design of power transmissions. Mech. Mach. Theory 2011, 46, 276–289. [Google Scholar] [CrossRef]
- Wei, S.; Honglei, H.; Yang, L.; Dijia, Z.; Jihai, J. Work characteristic analysis of single-rod symmetric cylinders. High Technol. Lett. 2017, 23, 286–292. [Google Scholar] [CrossRef]
- Yeaple, F. Hydraulic and electrohydraulic cylinders and actuators. In Fluid Power Design Handbook; CRC Press: Boca Raton, FL, USA, 1995; pp. 111–137. [Google Scholar]
- Ritari, A.; Vepsäläinen, J.; Kivekäs, K.; Tammi, K.; Laitinen, H. Energy Consumption and Lifecycle Cost Analysis of Electric City Buses with Multispeed Gearboxes. Energies 2020, 13, 2117. [Google Scholar] [CrossRef]
- Habibi, S.; Goldenberg, A. Design of a new high-performance electrohydraulic actuator. IEEE/ASME Trans. Mechatron. 2000, 5, 158–164. [Google Scholar] [CrossRef]
- Yang, R. Research on Control Strategy for Electro-hydrostatic Actuation System Based on a Novel Integrated Electrohydraulic Pump. Ph.D. Thesis, Beihang University, Beijing, China, 2019. [Google Scholar]
- McCullough, K. Design and characterization of a dual electro-hydrostatic actuator. Master’s Thesis, McMaster University, Hamilton, ON, Canada, 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| Maximum output force | 200 | kN |
| Rated output force | 100 | kN |
| Maximum output velocity | 150 | mm/s |
| Rated output velocity | 100 | mm/s |
| Stroke | ±55 | mm |
| Bandwidth of the position control loop | 8 | Hz |
| Control accuracy | ±0.1 | mm |
| Maximum mass | 115 | kg |
| Static stiffness | 9 × 107 | N/m |
| Ambient temperature | −40~80 | ℃ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Han, X.; Minav, T.; Fu, Y. Multi-Objective Optimization Design of a 30 kW Electro-Hydrostatic Actuator. Proceedings 2020, 64, 5. https://doi.org/10.3390/IeCAT2020-08525
Zhang C, Han X, Minav T, Fu Y. Multi-Objective Optimization Design of a 30 kW Electro-Hydrostatic Actuator. Proceedings. 2020; 64(1):5. https://doi.org/10.3390/IeCAT2020-08525
Chicago/Turabian StyleZhang, Chi, Xu Han, Tatiana Minav, and Yongling Fu. 2020. "Multi-Objective Optimization Design of a 30 kW Electro-Hydrostatic Actuator" Proceedings 64, no. 1: 5. https://doi.org/10.3390/IeCAT2020-08525
APA StyleZhang, C., Han, X., Minav, T., & Fu, Y. (2020). Multi-Objective Optimization Design of a 30 kW Electro-Hydrostatic Actuator. Proceedings, 64(1), 5. https://doi.org/10.3390/IeCAT2020-08525