1. Introduction
Nowadays, there is a growing demand for sensor-based fault detection techniques. In the industrial sector, there is an effort to develop reliable solutions for failure detection in three-phase induction motors (TIMs), since this equipment corresponds to the main applications and consume approximately 60% of all energy produced [
1]. Among the known alternatives, the use of micro-electro-mechanical systems (MEMS) sensors stands out as a low-cost application that has improved in recent years. The combination of this type of sensor with non-destructive techniques (NDT) such as vibration analysis, has already demonstrated satisfactory results for TIM diagnosis [
2,
3,
4,
5].
Moreover, the early fault diagnosis is an ideal application for the industry. It allows the creation of predictive maintenance plans to avoid unwanted shutdowns as well as irreversible damage to the motors. As TIMs are typically involved in the main production line steps, these shutdowns have an extremely high operational cost [
1]. Consequently, the application of low-cost MEMS-based sensors enhances the financial aspect of this approach. In the three-phase motor stators, winding insulation faults are one of the most commonly observed. Inter-turn failures cause current rise and reduce the lifespan of the electric machine. If these faults occur without being detected, it can lead to a phase to phase short-circuit and to permanent damage to the coils [
6].
Based on the evidences, the main goal of this paper is to evaluate the performance of a MEMS accelerometer to identify insulation faults in the stator windings by vibration analysis. To achieve this scope, two MEMS accelerometers were attached on both sides of a 1.5 hp TIM that has external electrical access to segments of the stator windings. Different levels of insulation faults were emulated by resistors applied in parallel to the windings segments and the vibration signals were acquired. Finally, the collected data were processed using different metrics, such as root mean square (RMS), kurtosis, and skewness to estimate a correspondence between vibrations and fault level.
This paper is divided in six sections.
Section 2 and
Section 3 present, respectively, the MEMS-based accelerometer and the signal processing techniques based on RMS, kurtosis, and skewness measures. The experimental setup is described in
Section 4. In
Section 5, the results are discussed. Then, the article is finalized in
Section 6.
2. MEMS Accelerometer
There are two main types of MEMS accelerometers: piezo resistive and capacitive [
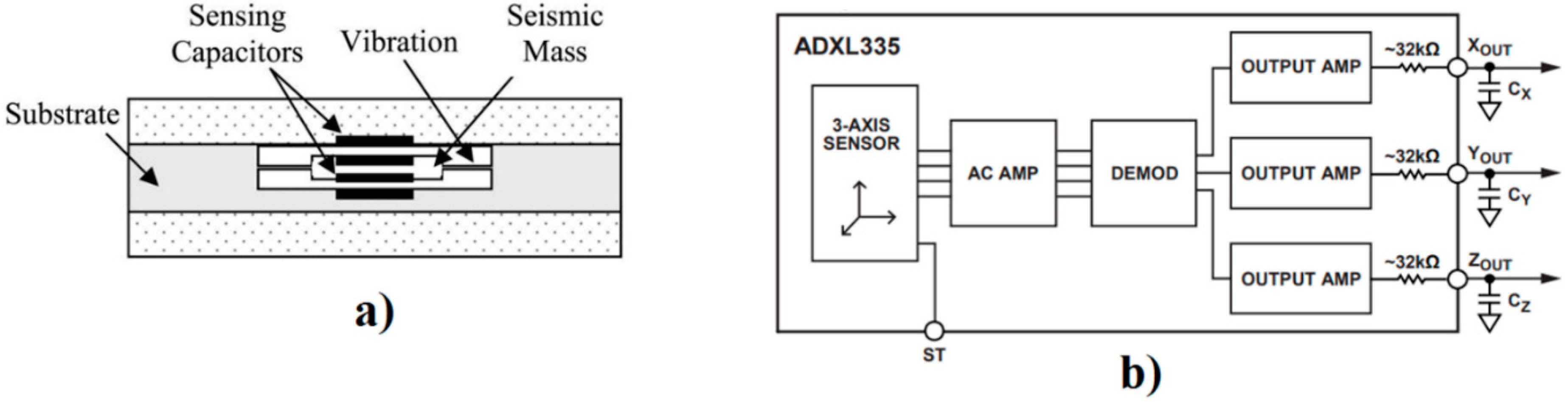
7]. In this work, the focus will be on capacitive-based MEMS accelerometer. The sensor operation is based on the test mass movement, which causes a change in capacitance between the mass and a fixed conductive electrode. This acceleration unbalances the differential capacitor used for measurement. The sensor output is proportional to the acceleration applied to the test mass [
6,
7,
8]. The typical construction of a capacitive-based MEMS accelerometer is shown in
Figure 1a. Accelerometers can be approximated to a mass-spring-damper system as seen in [
8]:
where
is the movement of test mass,
is an external input acceleration,
is the suspension stiffness, and
is the damping coefficient. Assuming natural resonance frequency
and the quality factor
, Equation 1 can be expressed in Laplace domain as:
For this work, the accelerometer used was the ADXL335 from Analog Devices. ADXL335 is a three-axis accelerometer and minimum full-scale range of ±3 g. The bandwidth for the X and Y axes is between 0.5 Hz and 1600 Hz, while for the Z axis it is 0.5 Hz to 500 Hz [
9]. The basic block diagram of ADXL335 is shown in
Figure 1b.
Understanding the operating principle allows us to evaluate the potential of this sensor for a wide range of applications, such as earthquake early warning systems [
10], to detect peak particle velocity in explosions [
11], motion monitoring [
12], and finally, the use for fault diagnosis by means of vibration analysis in TIMs [
2,
3,
4].
3. Signal Processing Analysis Applied to Vibration Signals
The following section will present and formulate the techniques used to process the acquired data. Beyond the traditional root mean square (RMS) analysis, two statistical analyses were also applied: kurtosis and skewness.
3.1. RMS Measure
The RMS technique is a method that has been proven successful when applied for vibration analysis. Previous work has shown that this technique is effective not only in characterization and diagnosis, but also in monitoring and estimating indicators of TIM faults [
13]. Furthermore, the Equation:
is described for discrete sampling, with
being the number of samples collected and
the value for the nth sample of the signal [
13].
3.2. Kurtosis Measure
Kurtosis is a dimensionless measure that describes the deviation of a
signal from the probability density function (PDF). When the signal approaches the Gaussian distribution, its value tends to 3. In previous works, this parameter was applied and proved to be a very sensitive tool to study the characteristics of the vibration signal [
14,
15]. The kurtosis can be expressed as:
where, in the Equation (4),
is the kurtosis,
is the expected value of the signal
,
m, and
are, respectively the mean and standard deviation of the signal
[
15].
3.3. Skewness Measure
Skewness is a statistical measure that evaluates the asymmetry of the signal distribution. It can be negative, positive, or zero, indicating, respectively, an asymmetry to the left, right, or a symmetrical distribution [
16]. Previous work has shown that this measure is extremely useful in identifying statistical patterns or filtering [
17]. Skewness is computed through the equation following:
where, in the Equation 5,
is the skewness factor and
, m, and s are, respectively, the expected value, the mean, and standard deviation of the signal
[
16].
4. Methods
In this section, the steps adopted for signal acquisition and the assembly of electrical machines will be detailed.
4.1. Machines Setup
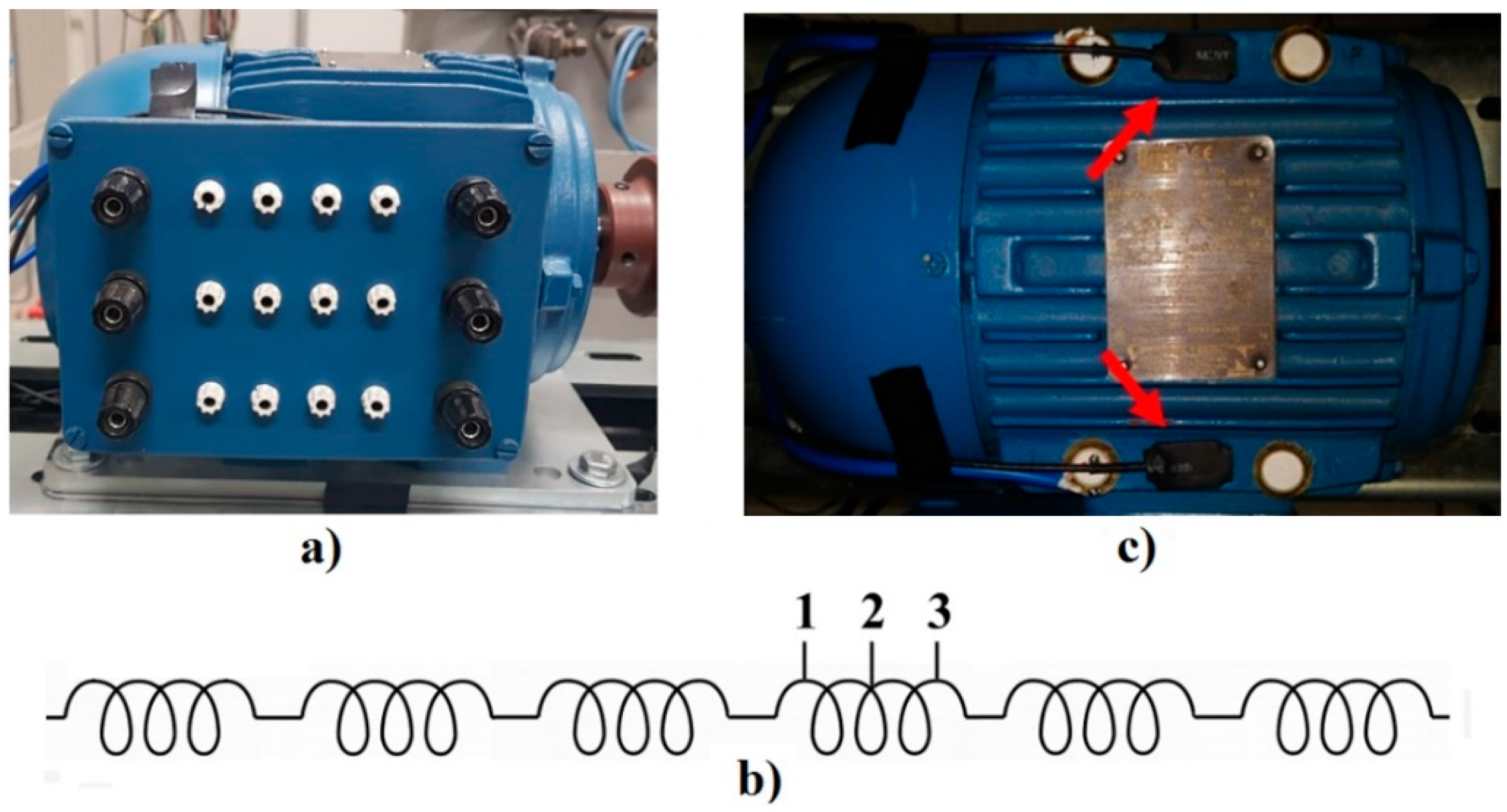
First, the 1.5 hp TIM was coupled to a DC machine and both of them were aligned and firmly bolted to the test bench. The induction motor was powered at its nominal voltage using a software-controlled AC power source. Additionally, the DC machine was set up as a generator and connected to a resistor bank in order to request the nominal mechanical power from the motor, simulating real operational conditions. The TIM was especially modified to allow electrical access to sections of its windings
Figure 2a. The winding of each phase consists of six coils. One of these coils was divided into two sections
Figure 2b, equivalent to 5.5% and 11% of the winding. Aiming to reproduce the insulation faults effects on the TIM, five different resistors (2.5, 5, 10, 12.5, 15 Ω) were connected, one at a time, to one of the two sections, representing different levels of fault. This procedure was repeated for each of the three phases, resulting in thirty different experiments. A baseline experiment was also performed without any resistors connected to the windings.
4.2. Data Acquisition
The signal acquisition was performed by two ADXL335 3-axis accelerometers attached to the left and right side of the TIM using cyanoacrylate adhesive (
Figure 2c). Its outputs bandwidths were limited to 500 Hz by
CX, CY, and
CZ capacitors. To avoid the effects of aliasing, the signals were sampled at 25 kS/s by a 16-channel Yokogawa DL850 DSO. Shielded cables were used to connect the sensors to the oscilloscope probes in order to prevent unwanted noise. Moreover, the test bench and the voltage sources were grounded with the same purpose. Thus, the acquired signals were transferred from the oscilloscope memory to a personal computer where the signal processing was accomplished. Furthermore, an additional 2 kHz digital low-pass filter was applied aiming to limit the frequencies to a range that is usually observed in vibration analysis [
1]. The values of RMS, kurtosis, and skewness measures were achieved using MATLAB® software.
5. Results and Discussion
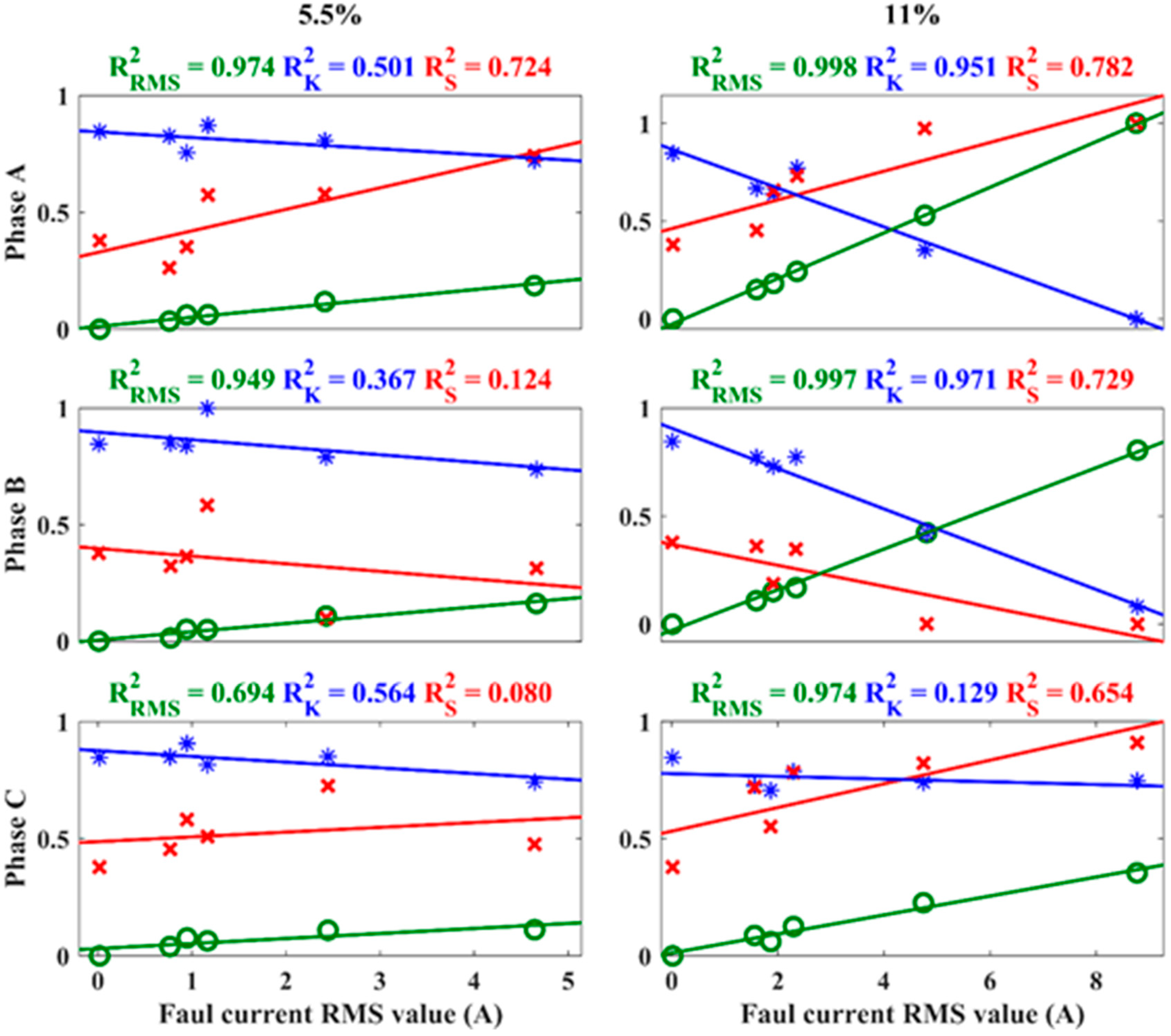
Aiming to correlate the RMS, kurtosis, and skewness measures to the insulation failures, its values were plotted as a function of the fault current.
Figure 3 presents the values of the three measures for the
Y-axis of the right sensor, as well as their coefficients of determination
. The RMS values are represented by the “circle” marks, the kurtosis values are represented by the “asterisk” marks, and the skewness values are represented by the “cross” marks. The
Y-axis was chosen due its better performance, although the
X-axis and
Z-axis also presented satisfactory results. The graphs in the same column refer to the experiments with the same percentage of winding on failure, while the graphs in the same row refer to the experiments along the same phase. Moreover, the values were normalized between 0 and 1 for better data visualization.
Figure 3 shows that the RMS measure presented R
2 coefficients very close to 1 for all the experiments, pointing to a directly proportional linear behavior between the RMS value and the fault current. The increase in RMS values denotes that insulation faults can cause an intensification of vibration activity in the induction motor.
Figure 3 also indicates that kurtosis values did not present R
2 values as close to 1 as RMS for 5.5% faults. However, they were satisfactory for phases A and B for 11% of winding failure. Skewness values also showed unsatisfactory values for 5.5% failures. Nevertheless, they presented acceptable values for all the three phases in a failure situation of 11%. The experiments with winding failure of 11% presented higher values of fault currents. This explains the best performances of all techniques for this case.
Finally, the three techniques demonstrated some degree of sensitivity for identifying insulation failures in the stator winding. However, it is important to emphasize that the measure that showed the best results was the RMS. In addition, the RMS value is the measure that requires the least computational effort to be achieved.
6. Conclusions
The operational relevance and massive implementation of TIM justify the development of reliable systems for early fault identification. Low-cost sensors and non-destructive techniques ensure the feasibility of these systems and stand out as alternatives for the high-cost commercial products. Given the context, this work presented an approach based on low cost MEMS sensors and vibration analysis to identify insulation faults in the TIM.
Based on the results, it is possible to confirm the success of the proposed signal processing techniques in the identification of the different levels of insulation failures. The RMS, kurtosis, and skewness measures were capable to identify the faults. However, the RMS presented the best results for all scenarios. Future work should use more advanced signal processing techniques. Further, new approaches may cover the classification of failure levels in the insulation of stator windings.



{kind=link}
{kind=link}
{kind=link}