Millimeter Wave Spatial Channel Characterization for Vehicular Communications †


 ,
,  ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
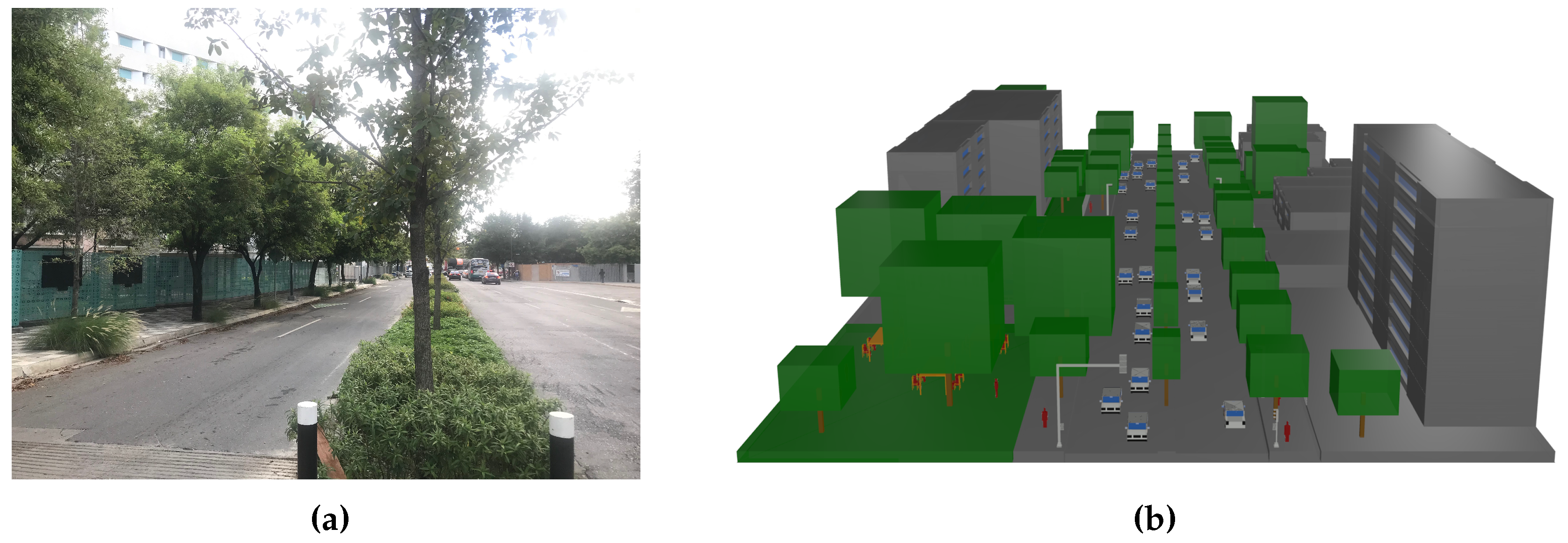
2. Scenario Description
3. Results
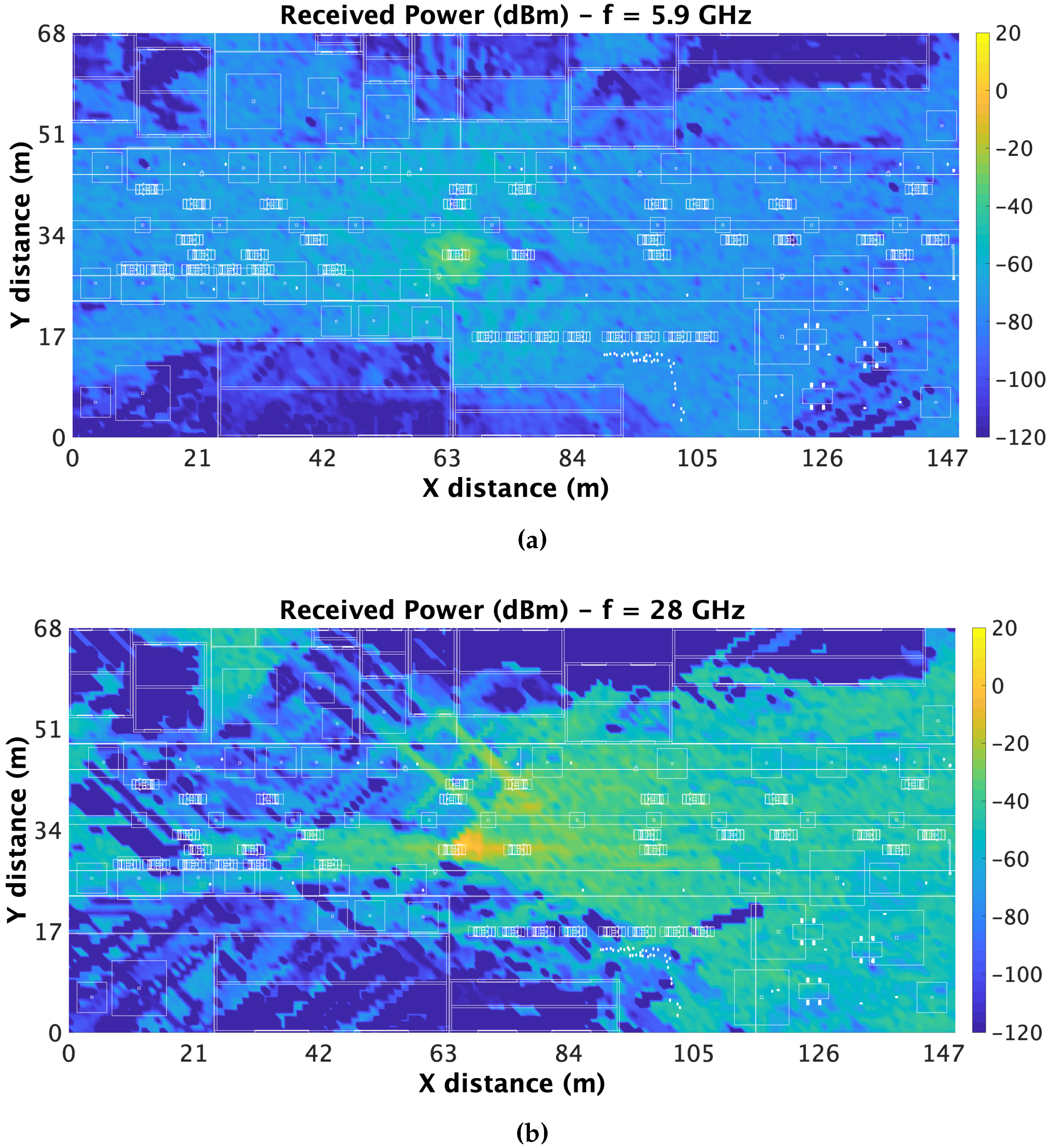
3.1. Received Power
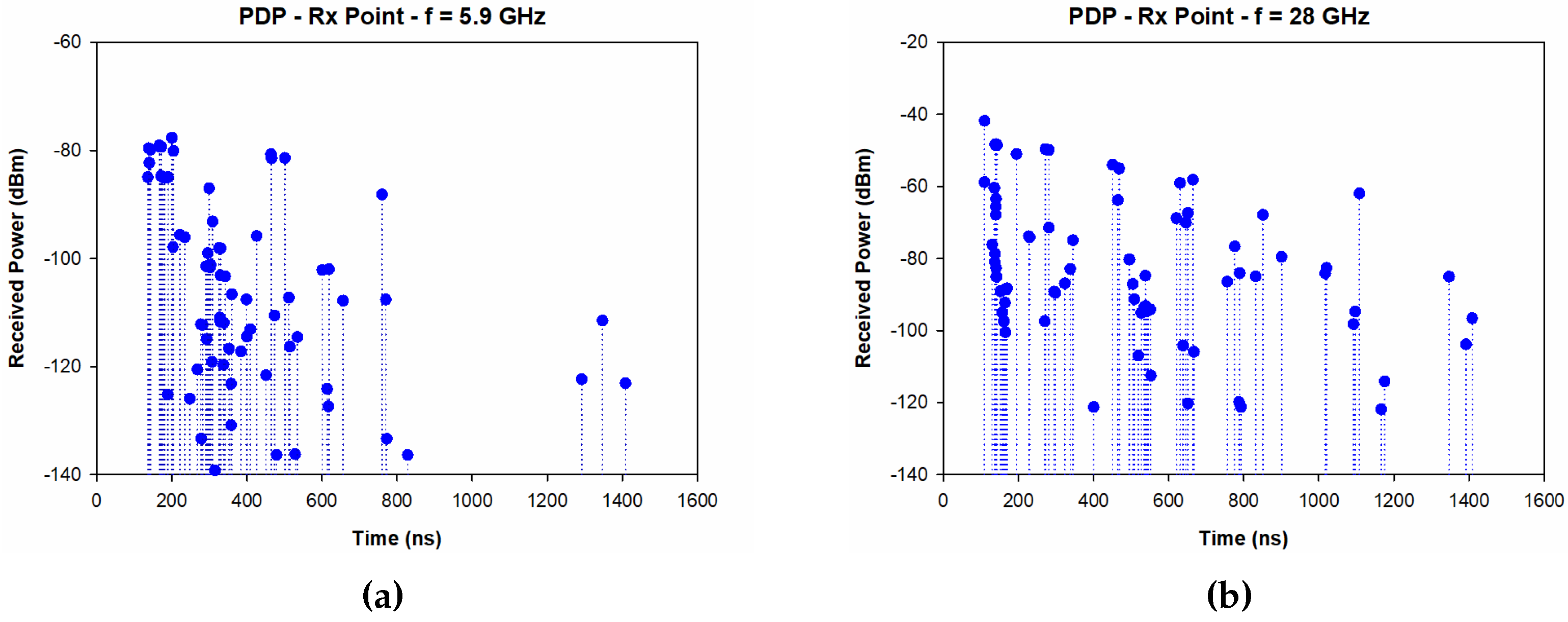
3.2. Power Delay Profile (PDP)
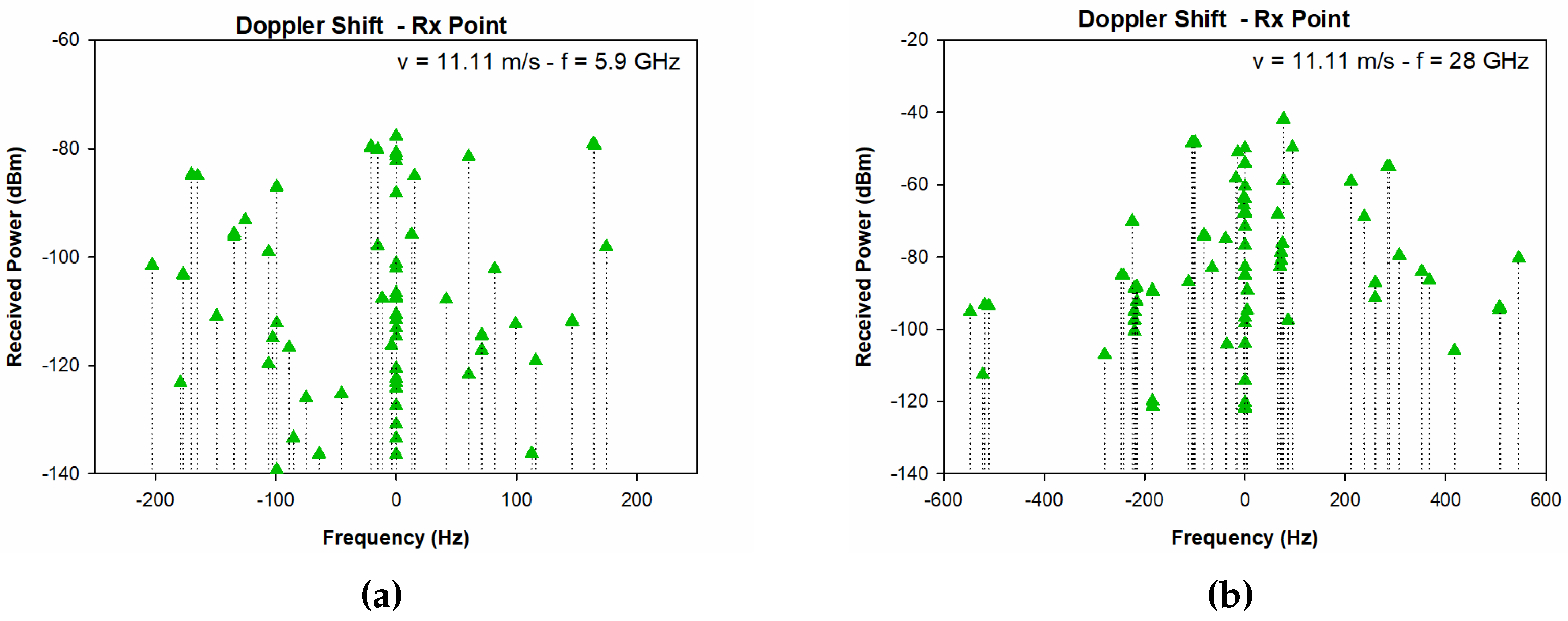
3.3. Doppler Shift
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Routray, S.K.; Sarangi, S.K.; Javali, A. Smart Cities: The Hopes and Hypes. arXiv 2019, arXiv:1907.05702. [Google Scholar]
- World Health Organization. Global Status Report on Road Safety 2018: Summary; Technical Report; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected vehicles: Solutions and challenges. IEEE Internet Things J. 2014. [Google Scholar] [CrossRef]
- Tassi, A.; Egan, M.; Piechocki, R.J.; Nix, A. Modeling and Design of Millimeter-Wave Networks for Highway Vehicular Communication. IEEE Trans. Veh. Technol. 2017, 66, 10676–10691. [Google Scholar] [CrossRef]
- Wang, X.; Kong, L.; Kong, F.; Qiu, F.; Xia, M.; Arnon, S.; Chen, G. Millimeter wave communication: A comprehensive survey. IEEE Commun. Surv. Tutorials 2018, 20, 1616–1653. [Google Scholar] [CrossRef]
- Martin-Vega, F.J.; Aguayo-Torres, M.C.; Gomez, G.; Entrambasaguas, J.T.; Duong, T.Q. Key technologies, modeling approaches, and challenges for millimeter-wave vehicular communications. IEEE Commun. Mag. 2018, 56, 28–35. [Google Scholar] [CrossRef]
- Va, V.; Shimizu, T.; Bansal, G.; Heath, R.W. Millimeter wave vehicular communications: A survey. Found. Trends Networking 2016, 10, 1–116. [Google Scholar] [CrossRef]
- Jameel, F.; Wyne, S.; Nawaz, S.J.; Chang, Z. Propagation channels for mmWave vehicular communications: State-of-the-art and future research directions. IEEE Wirel. Commun. 2019, 26, 144–150. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Rawat, M.; Rawat, K.; Ghannouchi, F.; Falcone, F. Convergence analysis in deterministic 3D ray launching radio channel estimation in complex environments. Appl. Comput. Electromagnet. Soc. J. 2014, 29, 256–271. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | 5.9 GHz | 28 GHz |
|---|---|---|
| TX Power | 10 dBm | 10 dBm |
| Antenna type/Gain | Monopole / 0 dBi | Steerable 70/ 20 dBi |
| 3D-RL antenna resolution/ Rebounds | degree / 6 | degree / 6 |
| Scenario size/Unitary volume analysis | 150 × 68 × 22 m / 1 × 1 × 1 m | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Corbo, F.A.; Azpilicueta, L.; Celaya-Echarri, M.; López-Iturri, P.; Picallo, I.; Falcone, F.; Alejos, A.V. Millimeter Wave Spatial Channel Characterization for Vehicular Communications. Proceedings 2020, 42, 64. https://doi.org/10.3390/ecsa-6-06562
Rodríguez-Corbo FA, Azpilicueta L, Celaya-Echarri M, López-Iturri P, Picallo I, Falcone F, Alejos AV. Millimeter Wave Spatial Channel Characterization for Vehicular Communications. Proceedings. 2020; 42(1):64. https://doi.org/10.3390/ecsa-6-06562
Chicago/Turabian StyleRodríguez-Corbo, Fidel Alejandro, Leyre Azpilicueta, Mikel Celaya-Echarri, Peio López-Iturri, Imanol Picallo, Francisco Falcone, and Ana Vazquez Alejos. 2020. "Millimeter Wave Spatial Channel Characterization for Vehicular Communications" Proceedings 42, no. 1: 64. https://doi.org/10.3390/ecsa-6-06562
APA StyleRodríguez-Corbo, F. A., Azpilicueta, L., Celaya-Echarri, M., López-Iturri, P., Picallo, I., Falcone, F., & Alejos, A. V. (2020). Millimeter Wave Spatial Channel Characterization for Vehicular Communications. Proceedings, 42(1), 64. https://doi.org/10.3390/ecsa-6-06562