Dual-Mode Radiation Sensor for UAS Platforms †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
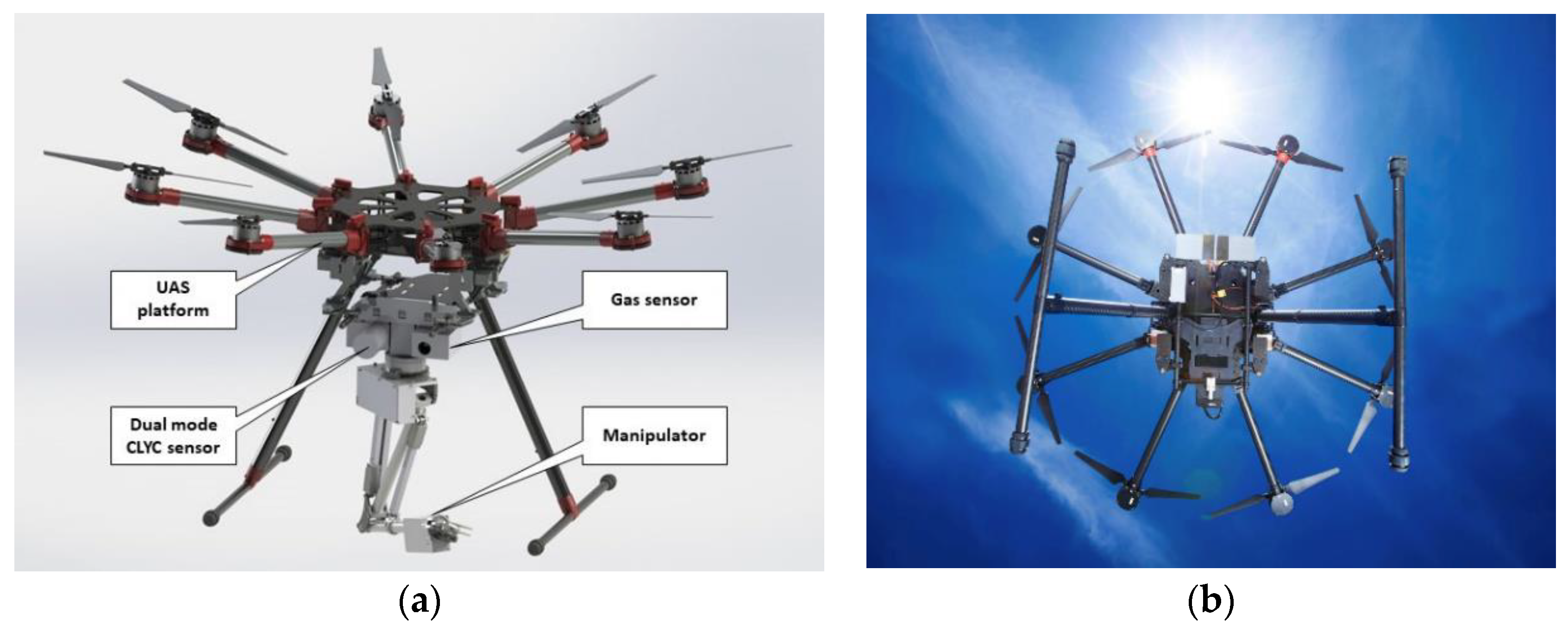
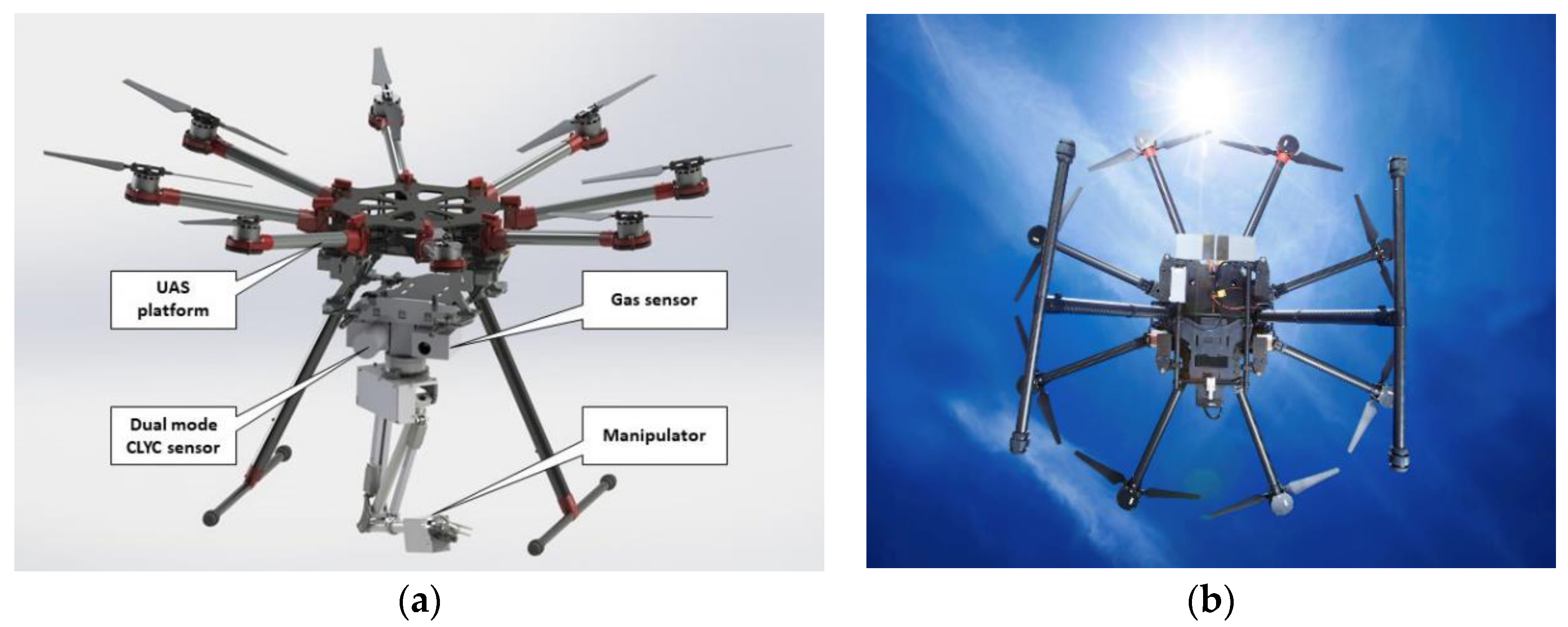
2.1. UAS Platform
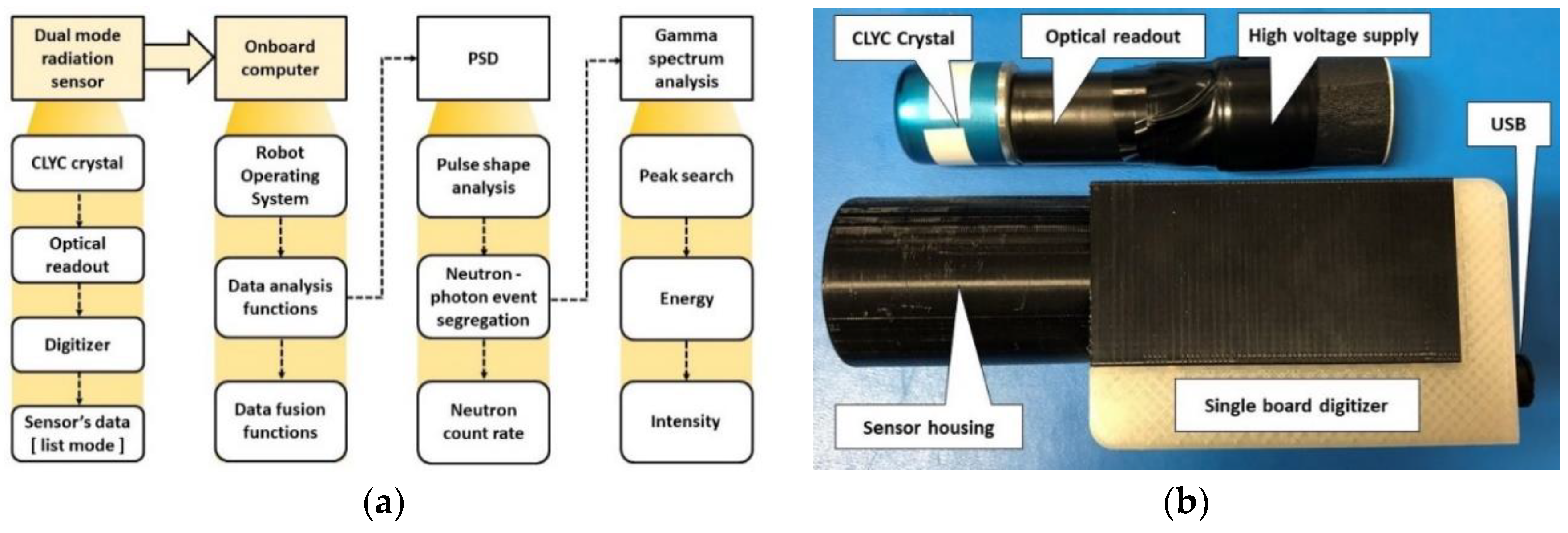
2.2. CLYC Radiation Sensor
3. Results and Discussion
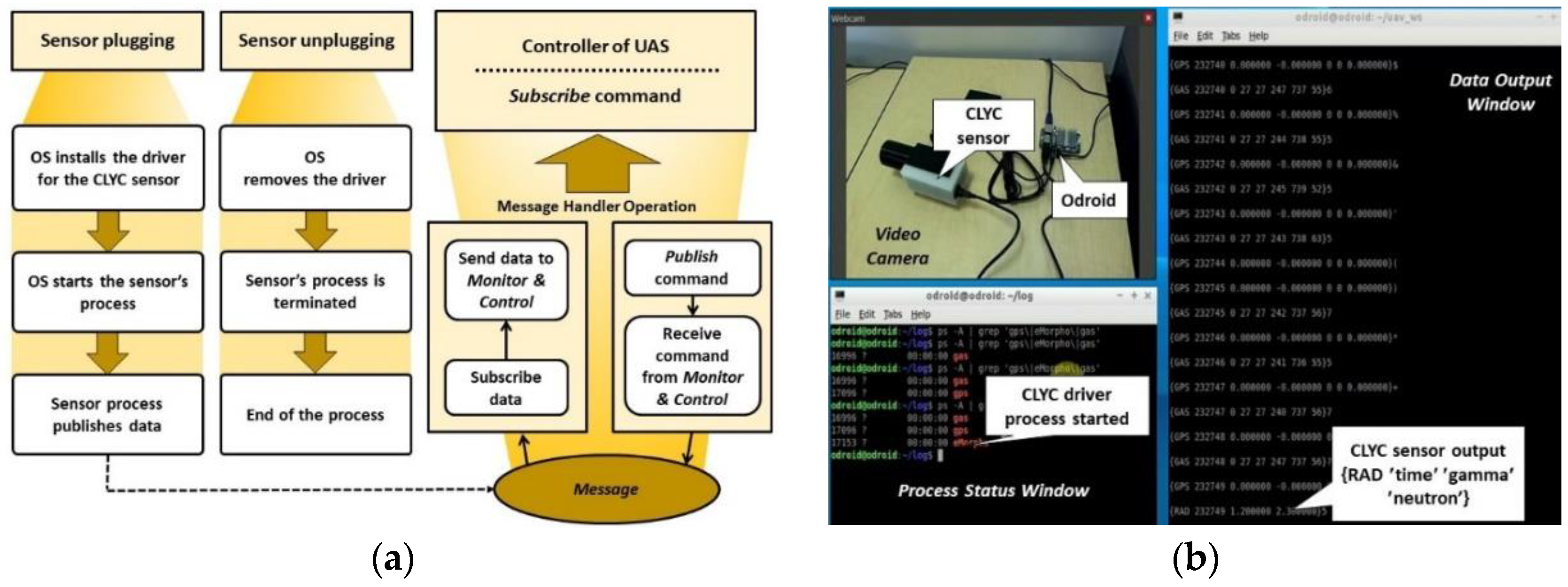
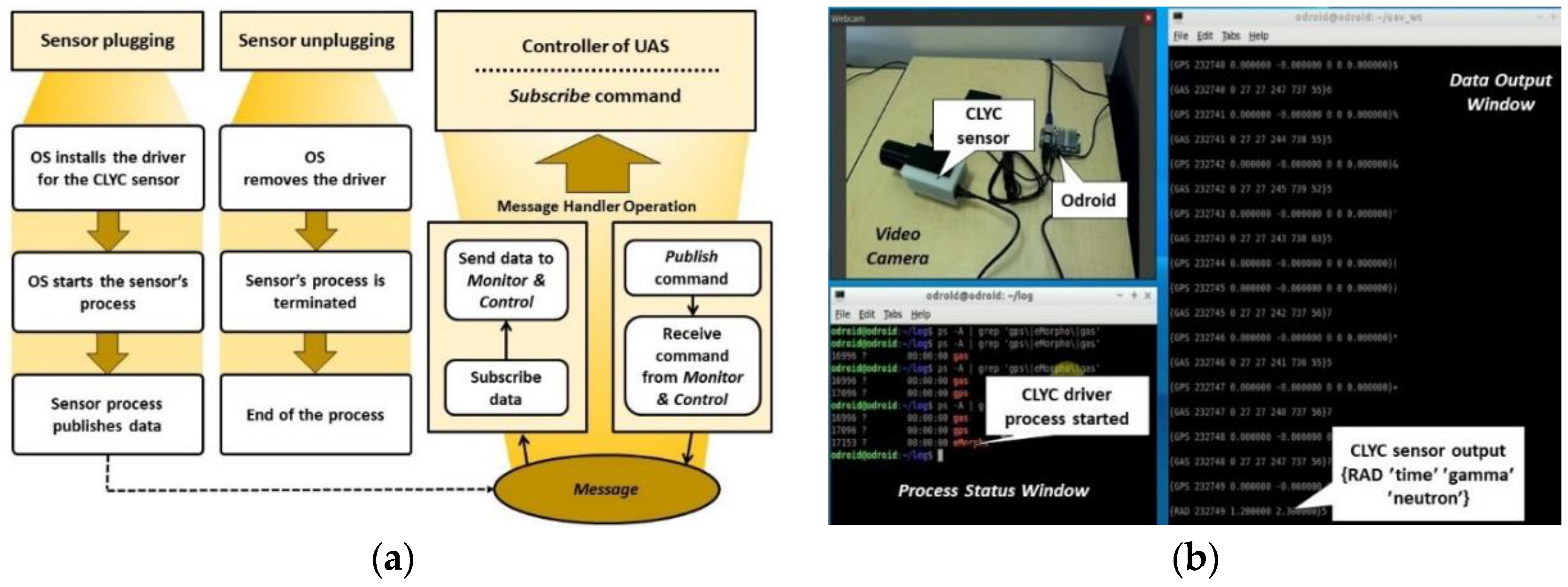
3.1. Sensor Integration into a Robotic Platform
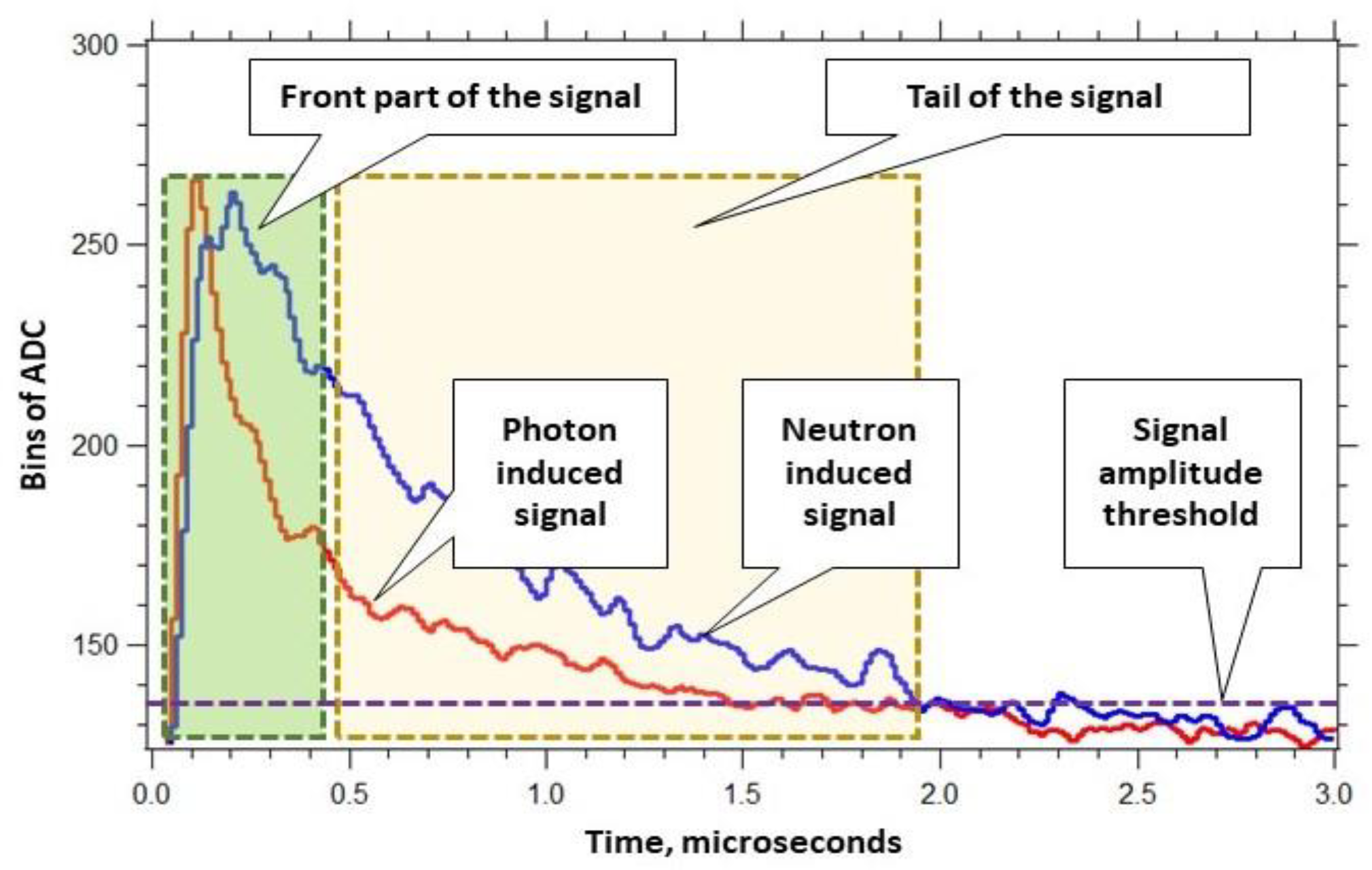
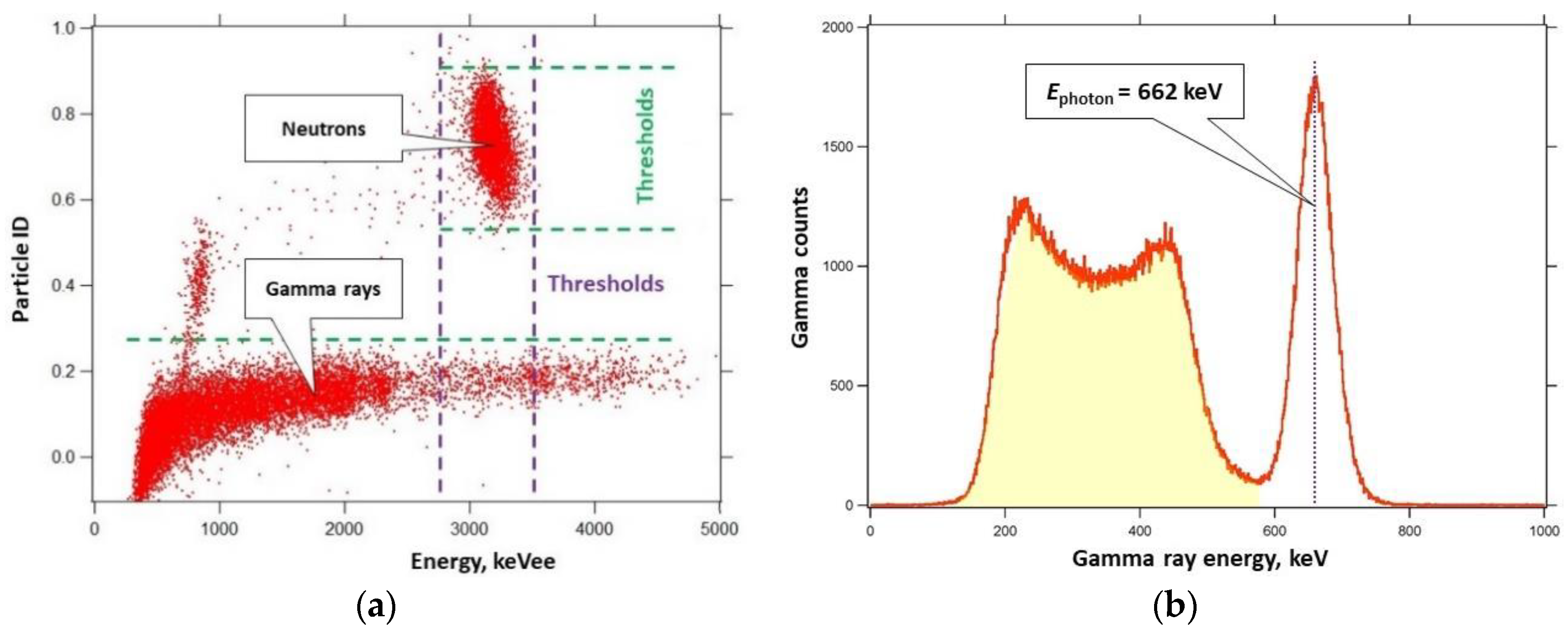
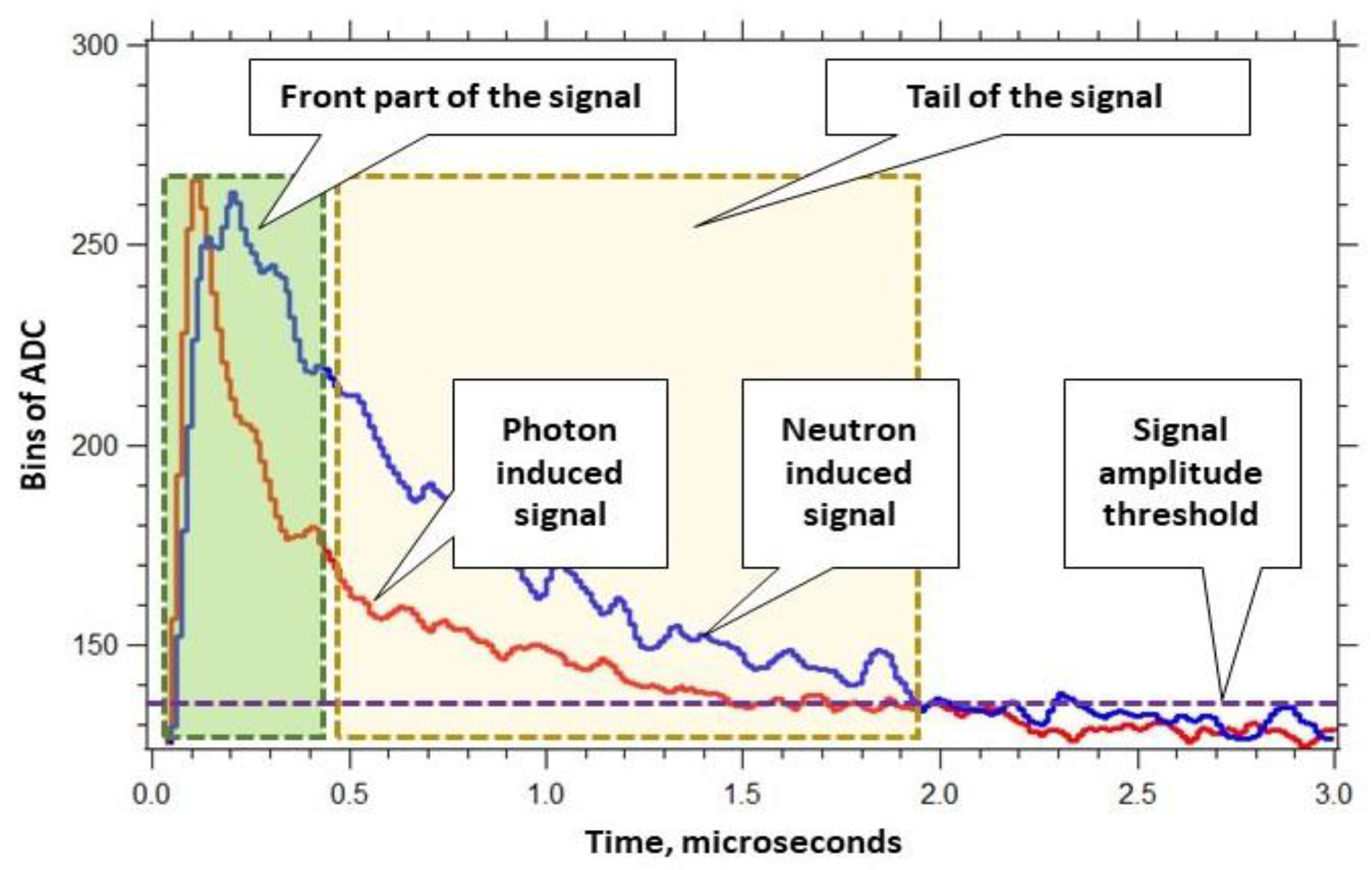
3.2. Dual-Mode Radiation Measurements
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Till, J.; Grogan, H. Radiological Risk Assessment and Environmental Analysis; Oxford University Press: New York, NY, USA, 2008; ISBN 978-0195127270. [Google Scholar]
- Sen, T.; Moore, L.; Hess, T. An organizational decision support system for managing the DOE hazardous waste cleanup program. Decis. Support Syst. 2000, 29, 89–109. [Google Scholar] [CrossRef]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Fukushima, M.; et al. Emergency response to the nuclear accident at the Fukushima Daiichi nuclear power plants using mobile rescue robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- Barzilov, A.; Hartman, J.; Novikov, I. Remote sensing of neutron and gamma radiation using unmanned aerial system. In Proceedings of the IEEE Nuclear Science Symposium and Medical Imaging Conference, San Diego, CA, USA, 31 October–7 November 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Han, J.; Chen, Y. Multiple UAV formations for cooperative source seeking and contour mapping of a radiative signal field. J. Intell. Robot. Syst. 2014, 74, 323–332. [Google Scholar] [CrossRef]
- Yim, W.; Barzilov, A.; Kazemeini, M.; Cook, Z. Low-altitude contour mapping of radiation fields using UAS swarm. Intell. Serv. Robot. 2019, 12, 219–230. [Google Scholar] [CrossRef]
- Kazemeini, M.; Cook, Z.; Lee, J.; Barzilov, A.; Yim, W. Plug-and-play radiation sensor components for unmanned aerial system platform. J. Radioanal Nucl. Chem. 2018, 318, 1797–1803. [Google Scholar] [CrossRef]
- Hartman, J.; Yazdanpanah, A.P.; Barzilov, A.; Regentova, E. 3D imaging using combined neutron-photon fan-beam tomography: A Monte Carlo study. Appl. Radiat. Isot. 2016, 111, 110–116. [Google Scholar] [CrossRef] [PubMed]
- S1000. Available online: https://www.dji.com/spreading-wings-s1000 (accessed on 5 October 2019).
- Robot Operating System. Available online: http://www.ros.org (accessed on 5 October 2019).
- Grejner-Brzezinska, D.; Wielgosz, P.; Kashani, I. On accuracy and reliability of instantaneous network RTK as a function of network geometry, station separation, and data processing strategy. GPS Solut. 2005, 9, 212–225. [Google Scholar] [CrossRef]
- Guss, P.; Stampahar, T.G.; Mukhopadhyay, S.; Barzilov, A.; Guckes, A. Scintillation properties of a Cs2LiLa(Br6)90% (Cl6)10%: Ce3+ (CLLBC) crystal. In Proceedings of the SPIE 9215, San Diego, CA, USA, 17–21 August 2014; Volume 921505. [Google Scholar] [CrossRef]
- D’Olympia, N.; Chowdhury, P.; Lister, C.; Glodo, D.; Hawrami, R.; Shah, K.; Shirwadkar, U. Pulse-shape analysis of CLYC for thermal neutrons, fast neutrons, and gamma-rays. Nucl. Instrum. Meth. A 2013, 714, 121–127. [Google Scholar] [CrossRef]
- Hartman, J.; Barzilovet, A.; Peters, E.E.; Yates, S.W. Measurements of response functions of EJ-299-33A plastic scintillator for fast neutrons. Nucl. Instrum. Meth. A 2015, 804, 137–143. [Google Scholar] [CrossRef]
- Medhat, M. Artificial intelligence methods applied for quantitative analysis of natural radioactive sources. Ann. Nucl. Energy 2012, 45, 73–79. [Google Scholar] [CrossRef]
- Barzilov, A.; Kessler, B.; Womble, P. Analysis of 14-MeV neutron induced gamma-ray spectra using multiwavelets. Radiat. Meas. 2015, 79, 43–49. [Google Scholar] [CrossRef]
- Kazemeini, M.; Barzilov, A.; Lee, J.; Yim, W. Integration of CZT and CLYC radiation detectors into robotic platforms using ROS. In Proceedings of the AIP Conference Proceedings 2160, Grapevine, TX, USA, 12–17 August 2018; pp. 050019-1–050019-6. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barzilov, A.; Kazemeini, M. Dual-Mode Radiation Sensor for UAS Platforms. Proceedings 2020, 42, 37. https://doi.org/10.3390/ecsa-6-06541
Barzilov A, Kazemeini M. Dual-Mode Radiation Sensor for UAS Platforms. Proceedings. 2020; 42(1):37. https://doi.org/10.3390/ecsa-6-06541
Chicago/Turabian StyleBarzilov, Alexander, and Monia Kazemeini. 2020. "Dual-Mode Radiation Sensor for UAS Platforms" Proceedings 42, no. 1: 37. https://doi.org/10.3390/ecsa-6-06541
APA StyleBarzilov, A., & Kazemeini, M. (2020). Dual-Mode Radiation Sensor for UAS Platforms. Proceedings, 42(1), 37. https://doi.org/10.3390/ecsa-6-06541