A Feasibility Study of Machine Learning Based Coarse Alignment †



Abstract
1. Introduction
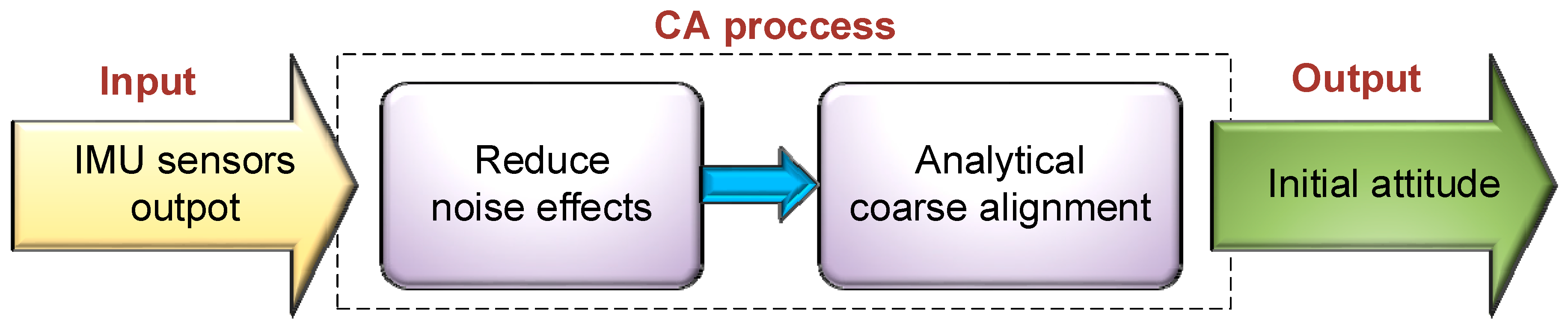
2. Traditional Coarse Alignment
3. Machine Learning Methodology
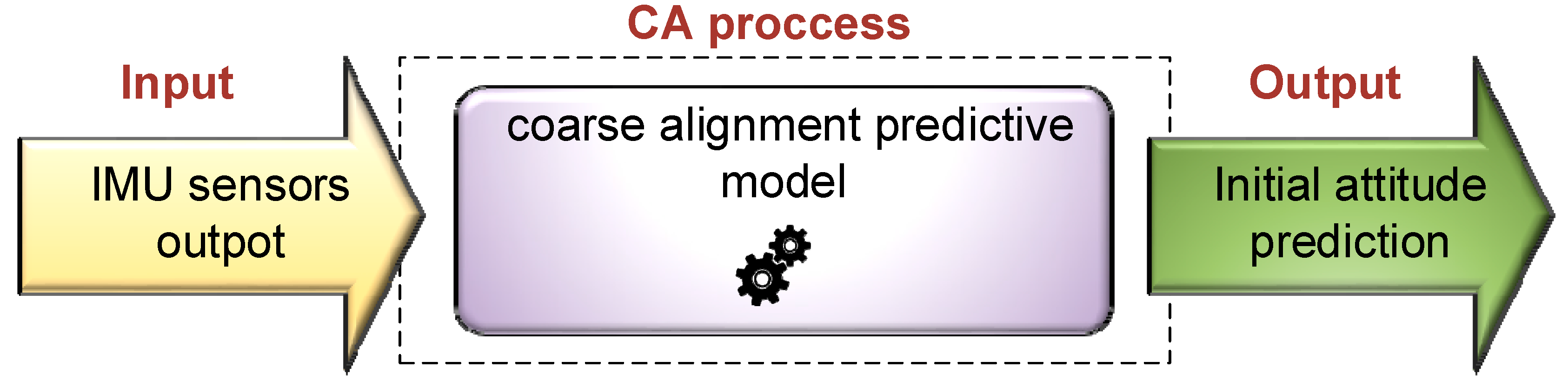
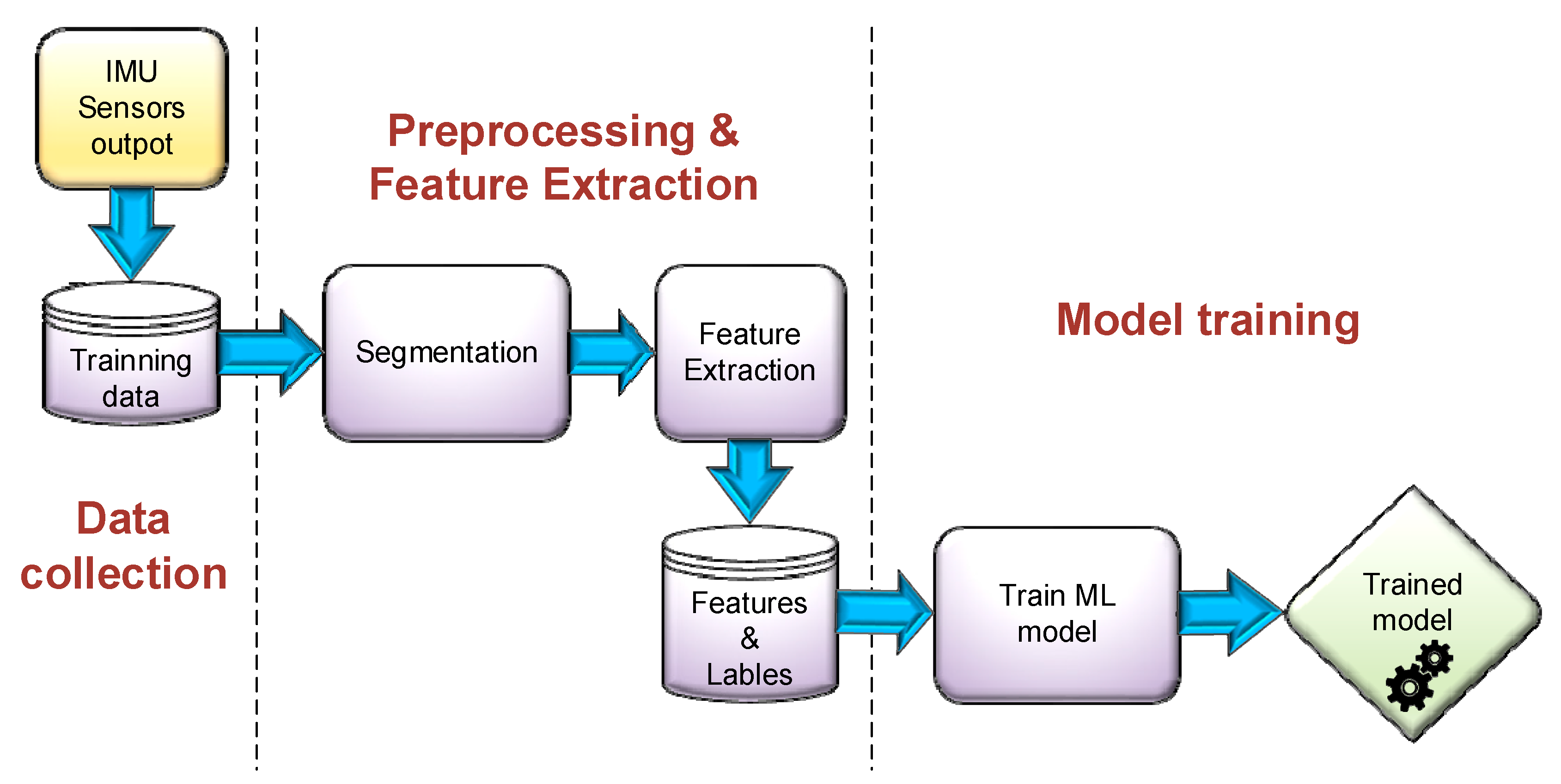
3.1. Overall Approach
3.2. Features Description
- Basic statistical features: Mean, Standard deviation, Variance, Minimum value, Absolute of the minimum value, Maximum value, Absolute of the maximum value.
- Advanced statistical features:
- Entropy: the amount of regularity and the unpredictability.
- Skewness: the asymmetry of the probability distribution.
- Kurtosis: the “tailedness” of the probability distribution.
- Energy: the sum of squares of values.
- Amplitude: the difference between the minimum and the maximum value.
- Time-Domain Features:
- Number of peaks: the number of peaks with defined minimum peak height and the minimum distance between peaks.
- Mean spectral energy: the mean spectral energy computation using one-dimensional discrete Fourier Transform.
- Mean crossing rate: the number of mean crossings.
- Zero-crossing rate: the number of sign changes.
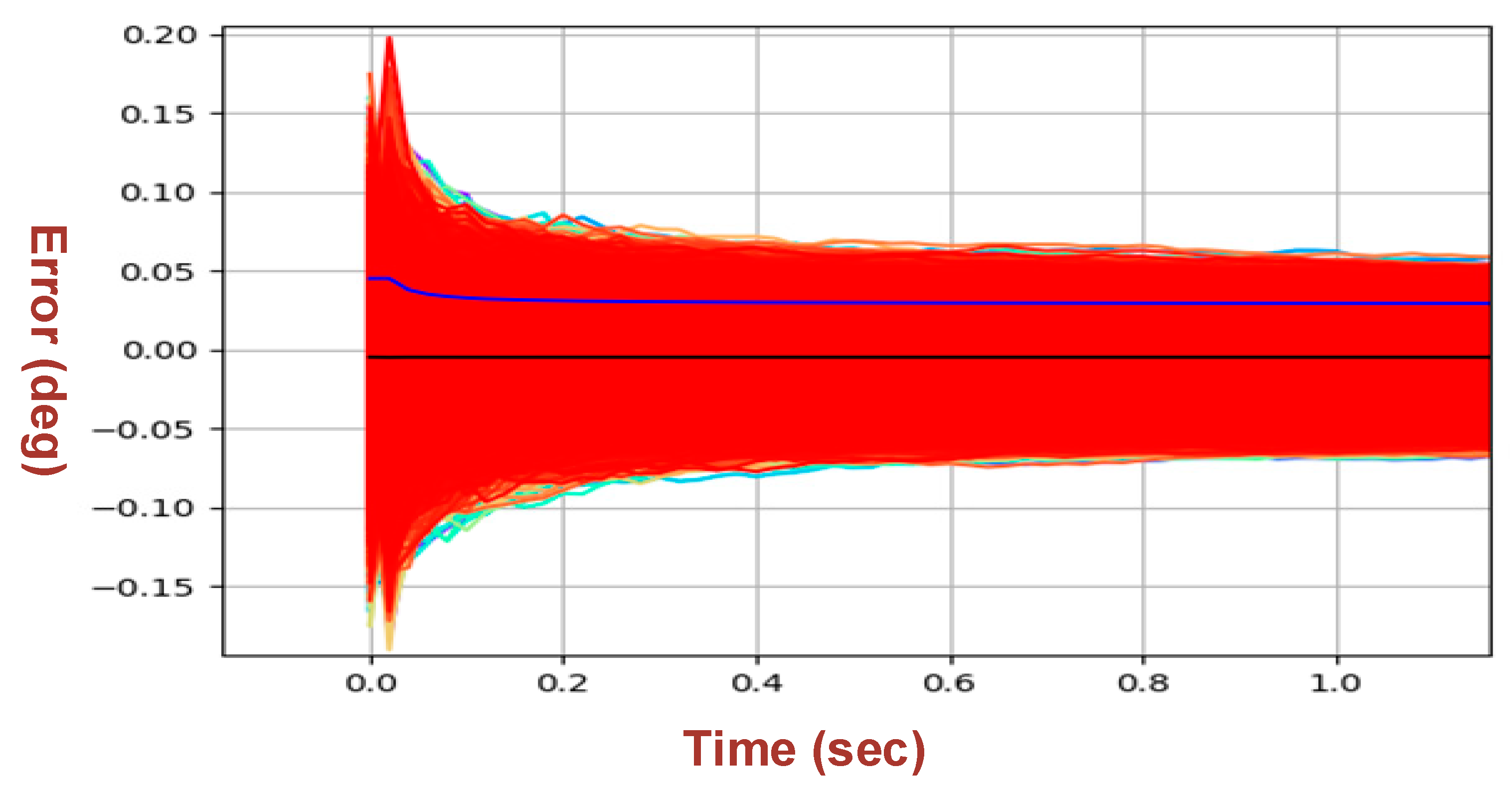
4. Results and Discussion
5. Conclusions
Conflicts of Interest
References
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology, 2nd ed.; The American Institute of Aeronautics and Astronautics and the Institution of Electrical Engineers: Reston, VA, USA, 2004. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Aggarwal, P.; Syed, Z.; Noureldin, A.; El-Sheimy, N. MEMS-Based Integrated Navigation; ARTECH HOUSE: Boston, London, 2010. [Google Scholar]
- Baird, W.H. An introduction to inertial navigation. Am. J. Phys. 2009, 77, 844–847. [Google Scholar] [CrossRef]
- Bistrov, V. Performance Analysis of Alignment Process of MEMS IMU. Int. J. Navig. Obs. 2012, 2012, 1–11. [Google Scholar] [CrossRef]
- Hailiang, W.; Guozhang, L.; Zhiyong, S. Overview of Initial Alignment Method for Strap down Inertial Navigation System. In Proceedings of the, Tianjin, China, 10–11 June 2017; Volume 114, pp. 149–154. [Google Scholar]
- Han, S.; Wang, J. A Novel Initial Alignment Scheme for Low-Cost INS Aided by GPS for Land Vehicle Applications. J. Navig. 2010, 63, 663–680. [Google Scholar] [CrossRef]
- Vaknin, E.; Klein, I. Coarse leveling of gyro-free INS. Gyroscopy Navig. 2016, 7, 145–151. [Google Scholar] [CrossRef]
- Tsukerman, A.; Klein, I. Analytic Evaluation of Fine Alignment for Velocity Aided INS. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 376–384. [Google Scholar] [CrossRef]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report; University of Cambridge: Cambridge, UK, 2007. [Google Scholar]
- Breiman, L. Machine Learning; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2001. [Google Scholar] [CrossRef]
- Tianqi, C.; Carlos, G. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD ‘16), San Francisco, CA, USA, 13–17 August 2016; ACM: New York, NY, USA, 2016; pp. 785–794. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Classical Method | RF |
|---|---|---|
| Convergence time | 2 s | 1 s |
| MAE (deg) | 0.005 (±0.029) | 0.0039 (±0.0031) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zak, I.; Klein, I.; Katz, R. A Feasibility Study of Machine Learning Based Coarse Alignment. Proceedings 2019, 4, 50. https://doi.org/10.3390/ecsa-5-05735
Zak I, Klein I, Katz R. A Feasibility Study of Machine Learning Based Coarse Alignment. Proceedings. 2019; 4(1):50. https://doi.org/10.3390/ecsa-5-05735
Chicago/Turabian StyleZak, Idan, Itzik Klein, and Reuven Katz. 2019. "A Feasibility Study of Machine Learning Based Coarse Alignment" Proceedings 4, no. 1: 50. https://doi.org/10.3390/ecsa-5-05735
APA StyleZak, I., Klein, I., & Katz, R. (2019). A Feasibility Study of Machine Learning Based Coarse Alignment. Proceedings, 4(1), 50. https://doi.org/10.3390/ecsa-5-05735