RFID Timing Antenna for Open Water Swimming Competitions †


Abstract
:1. Introduction
1.1. Motivation
1.2. Available Solutions
2. Material and Methods
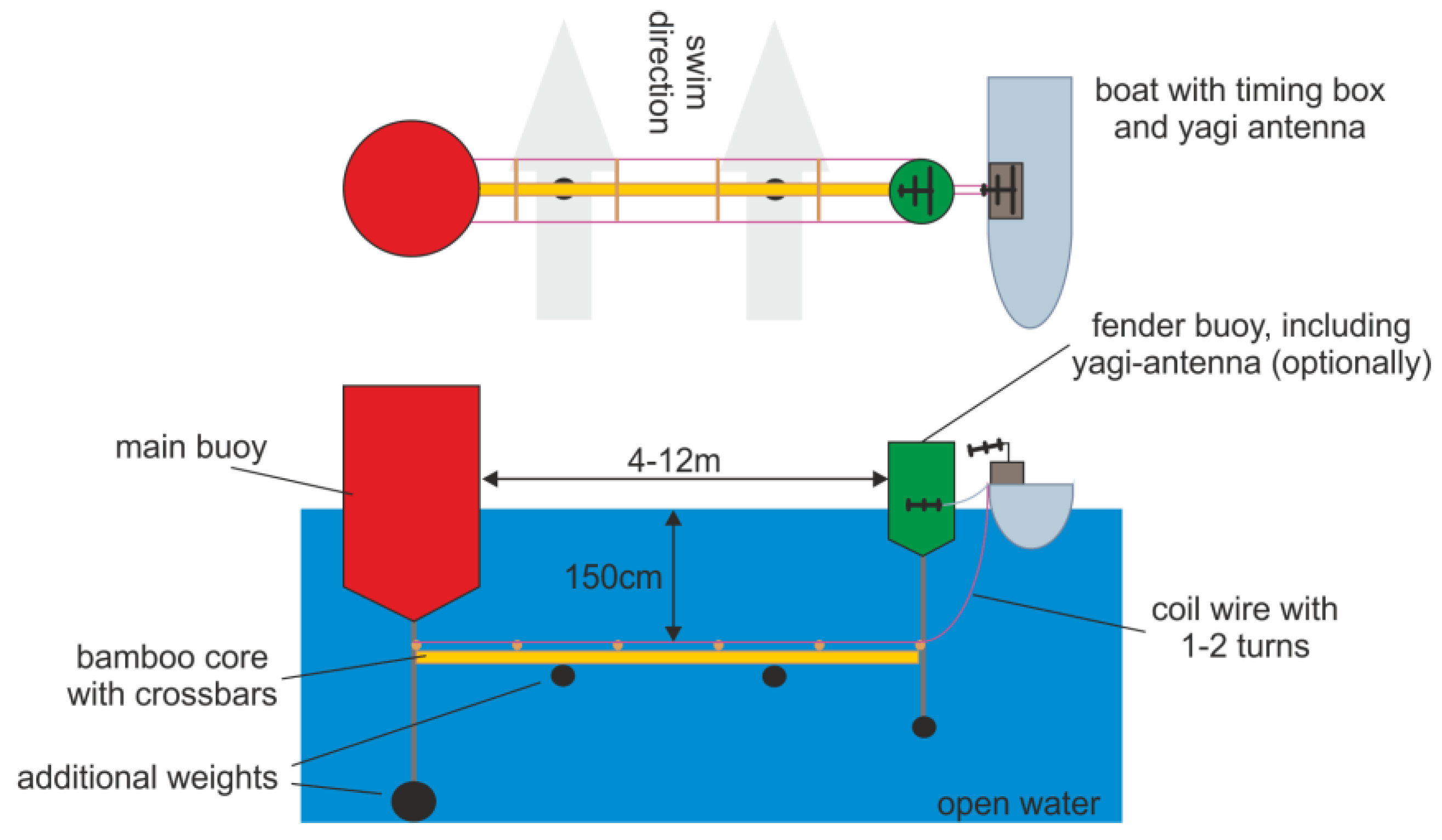
- No metal inside the device components. The whole device must be able to swim in the water
- The device and all the components should be easily assembled, disassembled and reused.
- All parts of the device must be transportable inside a normal car.
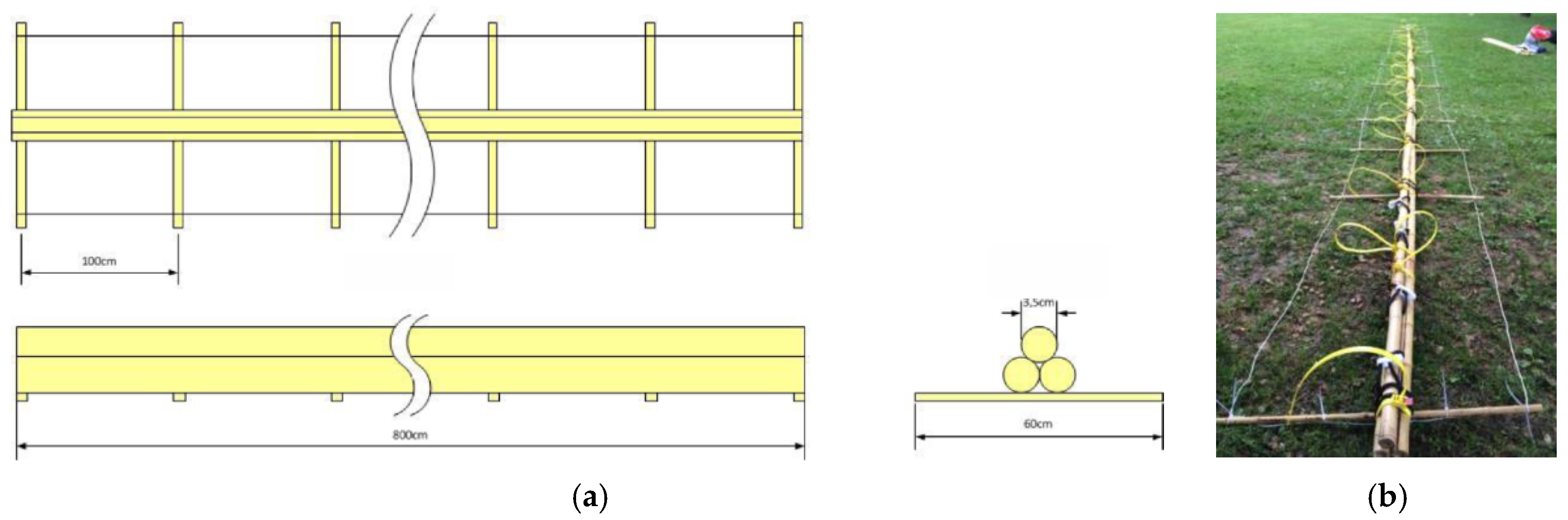
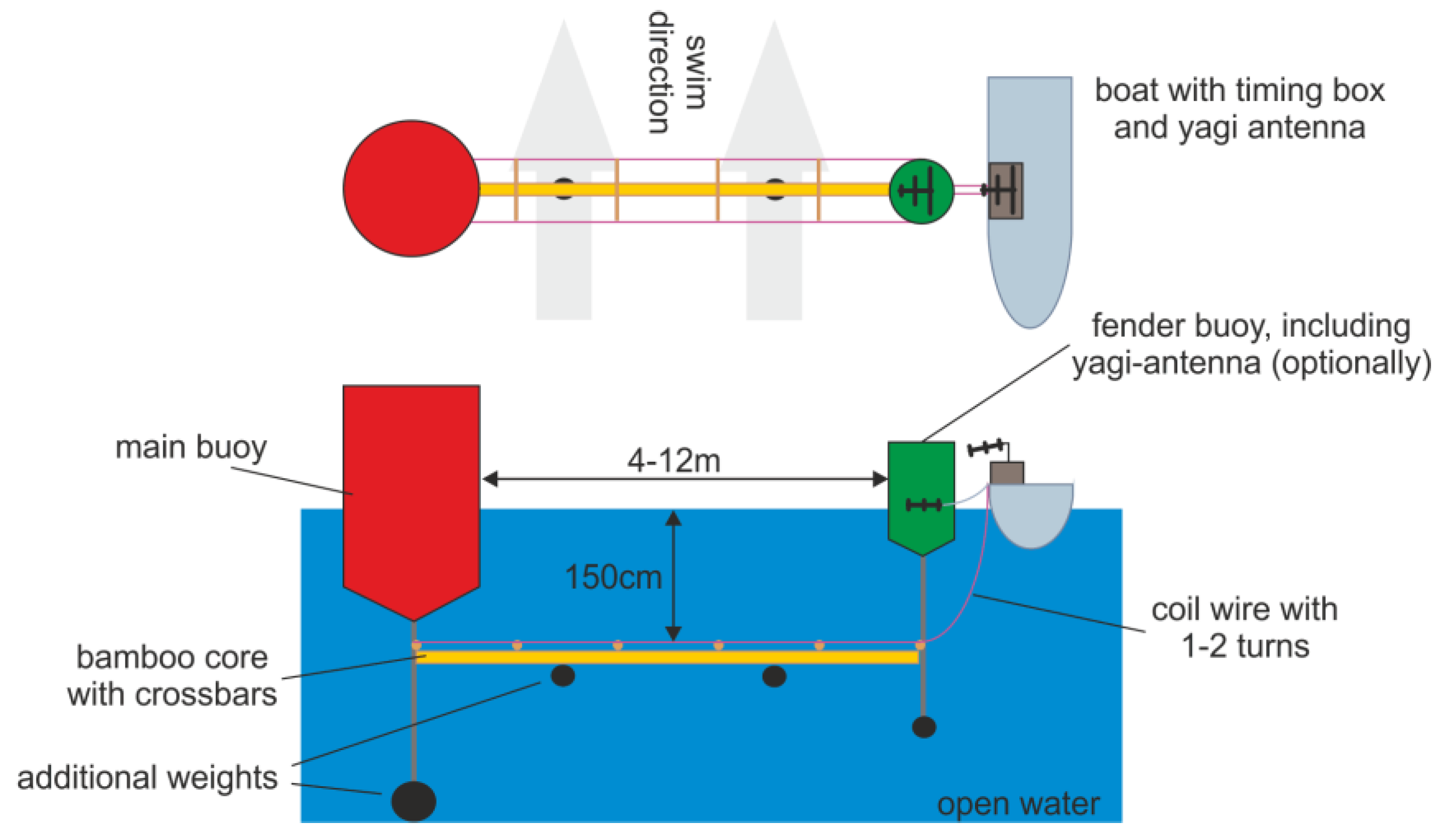
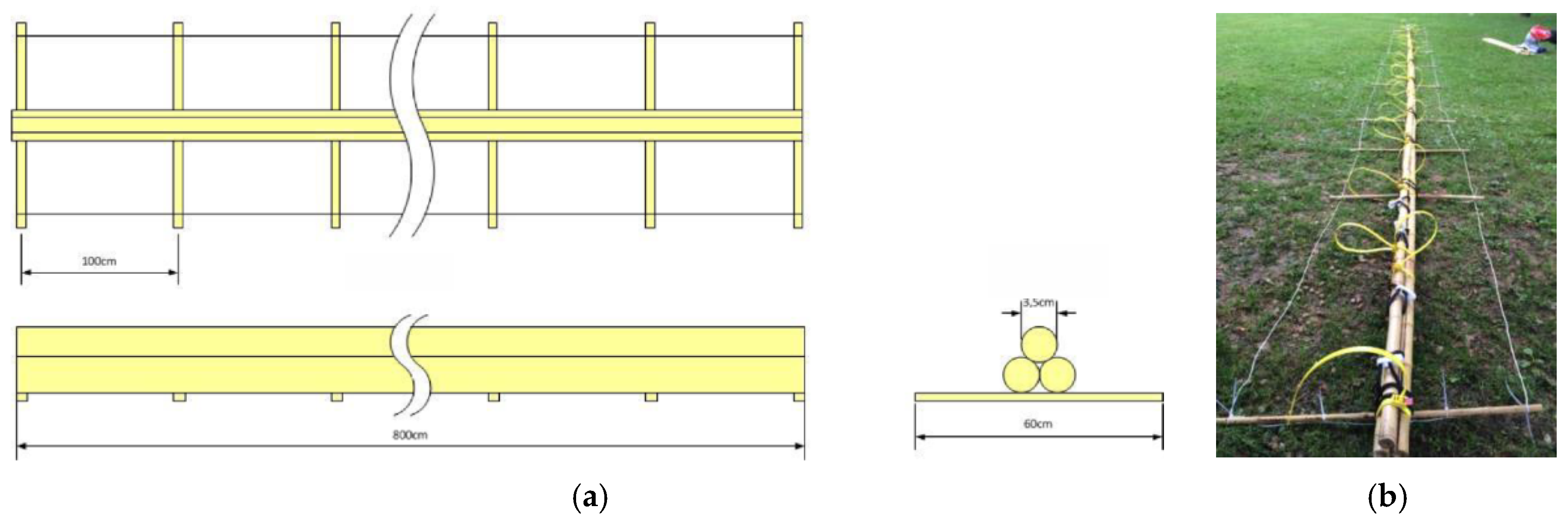
2.1. Construction
2.2. Calculations
3. Results
4. Conclusions
- Permanent communication between the timing team, organizer and the water rescue team.
- Assembling a ruggedized device that stands against water waves, weak collisions with boats and kicks off athlete’s feet.
- The device must be tied strongly to the main buoyage.
- The width of the timing gate should be suitable for the maximum number of passing athletes.
- The boat must have a safety distance to the beginning of the coil to avoid inductive inferences and to prevent athletes against collision with the boat.
- The service team should be trained to assemble and attach the construction precisely even under time pressure.
References
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards and Identification, 2nd ed.; John Wiley & Sons Ltd.: Chichester, UK, 2003. [Google Scholar]
- RFID Race Timing System. Available online: www.rfidtiming.com (accessed on 11 June 2017).
- MYLAPS. MyLaps ProChip Manual. 2010. p. 15. Available online: http://support.mylaps.com/kb/en/b2b/Manuals/MyLaps_ProChip_Manual_Dec2010.pdf (accessed on 11 June 2017).
- Wöllik, H.; Müller, A.; Herriger, J. Permanent RFID Timing System in a Track and Field Athletic Stadium for Training and Analyzing Purposes. Procedia Eng. 2014, 72, 202–207. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Antenna Placement | Typical Gate Width | RFID-System | Complexity |
|---|---|---|---|
| Pool edge | 4–12 m | DF, active | simple |
| Overhead in channel | up to 15 m | DF, active | middle |
| Overhead offshore | up to 6 m | LF, HF, DF, active & passive | complex |
| Floor onshore | 2–4 m | LF, HF, DF, UHF, active & passive | simple |
| Floor in shallow water | 2–4 m | DF, active & passive | middle |
| Floating in deep water | up to 12 m | DF, active | complex |
| Quantity | Min | Typ | Max | Unit | Remark |
|---|---|---|---|---|---|
| vol. bamboo core VC | 13 | 26 | dm3 | 15 sticks, d = 35 mm, l = 180 cm (wet: volume reduces to half) | |
| vol. bamboo crossbars VCB | 0.4 | dm3 | 9 bars, d = 10 mm, l = 60 cm | ||
| vol. bamboo constr. VBCTot | 13.4 | 26.4 | dm3 | VBCTot = VC + VCB | |
| mass core and crossbars mC | 10.2 | kg | mC = VBCTot*ρC (ρC = 380 kg/m3) | ||
| weight core (force down) FDBC | 100 | N | FDBC = mC*g | ||
| uplift force FUBC | 131 | 259 | N | FUBC = ρW*VBCTot *g dens. of water ρW = 1000 kg/m3 | |
| net uplift force FUBCnet | 31 | 159 | N | FUBCnet = FUBC − FDBC | |
| vol. buoys VB | 63 | dm3 | 2 cylinder, d = 27 cm, h = 55 cm | ||
| mass buoys mB | 4.8 | kg | |||
| weight buoys FB | 47 | N | FB = mB*g | ||
| uplift force FUB | 618 | N | F = ρW*VB*g | ||
| uplift force partly dipped FUBpart | 206 | N | 1/3 of both buoys in water | ||
| net force buoys FUBnet | 159 | N | FUBnet = FUBpart − FB | ||
| uplift force total FUTot | 190 | 318 | N | FUTot = FUBnet + FUBCnet | |
| vol. stone VS | 1 | dm3 | concrete 20 × 10 × 5 cm | ||
| mass stone mS | 2.4 | kg | |||
| weight stone FS | 23.5 | N | FS = mS*g | ||
| uplift force stone FUS | 9.8 | N | FUS = ρW*VS*g | ||
| net weight stone FSnet | 13.7 | N | FSnet = FS − FUS | ||
| number of stones nS | 13 | 23 | nS = FUTot/FSnet equilibrium for floating |
| Competition | Passings | Reading Rate in % | Antenna Placements | Timing System |
|---|---|---|---|---|
| Ironman 5i50 AUT 2012 | 462 | 94.6 | Overhead in channel | J-Chip |
| Ironman AUT 2013 | 2640 | 100 | Floating in channel | Mylaps |
| Ironman AUT 2014 | 2723 | 100 | Floating in channel | Mylaps |
| Ironman AUT 2015 | 2498 | 98.7 | Floating in deep water | Mylaps |
| Open Water Swim AUT Lendkanal Crossing 2016 | 273 | 96.3 | 2× Floating in channel, 1× Overhead in channel | J-Chip |
| Open Water Swim AUT Lendkanal Crossing 2017 | 297 | 100 | 2× Floating in channel, 1× Overhead in channel | J-Chip |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woellik, H. RFID Timing Antenna for Open Water Swimming Competitions. Proceedings 2018, 2, 300. https://doi.org/10.3390/proceedings2060300
Woellik H. RFID Timing Antenna for Open Water Swimming Competitions. Proceedings. 2018; 2(6):300. https://doi.org/10.3390/proceedings2060300
Chicago/Turabian StyleWoellik, Helmut. 2018. "RFID Timing Antenna for Open Water Swimming Competitions" Proceedings 2, no. 6: 300. https://doi.org/10.3390/proceedings2060300
APA StyleWoellik, H. (2018). RFID Timing Antenna for Open Water Swimming Competitions. Proceedings, 2(6), 300. https://doi.org/10.3390/proceedings2060300